当前位置:网站首页>Relatively easy to understand PID understanding
Relatively easy to understand PID understanding
2022-07-01 23:44:00 【xiaoqi976633690】
Share a relatively easy to understand PID understand
stay APM In the parameter setting menu , There is one PID Set up , No contact with PID For people who , That's completely confused , A bunch of confused numbers . In view of this , This article strives to explain in popular language PID Various meanings of . PID Control is a widely used control method in the field of automatic control ,P Represents proportion ,I Integral represents ,D For differential , We can see from these nouns ,PID Control is based on an important branch of Mathematics : Digital automatic control mode based on calculus , It takes the data collected by the sensor as the input source , As scheduled PID Parameters are calculated according to a specific formula and then output control .
An example of image , A train that is about to arrive at the station will cut off the output power when it is about to arrive at the station , Let it slide to the platform position by virtue of inertia . Suppose a train is set to 100km/h The speed is in front of the station 1km Cut off the power and began to slide , So this 100 Than 1 It's the ratio P The meaning of ,P The bigger it is , The faster it starts to slide in front of the station . The advantage of fast initial speed of taxiing is that it can enter the station quickly , But too fast initial sliding speed will cause the train to rush across the platform under the action of inertia , As a result, the train had to reverse , But because P Set too large , Taxiing after reversing will also make the train reverse , thus , It forms a shock situation of moving forward and backward repeatedly . and P The settings are small , The entry speed will become very slow , The arrival time is extended . So set an appropriate P The value is PID The primary task of regulation . because P Is a fixed value , If the distance between the train speed and the platform is idealized in a coordinate diagram , Do not consider the effect of inertia and external forces , The relationship between the two shows P The result of adjustment will be a straight slash , The steeper the slash , Represents the shorter the arrival time 
The image above P The adjustment result is just for convenience of understanding , In practice, it is simply impossible ,PID The result of calculation is not like this . No matter what , If only P Adjust the , The train is either set with a lower P Value reaches the target platform at a very slow speed , Or it's overshoot , It is difficult to set a balance between speed and accuracy . So the next step is to explain D It's time for differentiation . According to the example above , If P be equal to 100 When , The train can just slide to the platform , The time taken is 10 minute . But for an automation system that requires high self stability , this 10 Minutes is too long , Can we speed it up ? Sure , We put P Increase to 120, Let the train driver drive the train in front of the station 1km The place with 120km/h The speed of starts to slow down and slide , Then stand in front 500 Step on the brake to reduce the speed to 80km/h, at the station 300 Mi stepped on the brake again to reduce the speed to 50km/h, at the station 100 Mi stepped on the brake again , Reduce the speed to 20km/h, at the station 10 Mi let the train slide to the exact position of the platform in a short time , thus , The speed of entering the station will be greatly accelerated , The original need 10 Minutes may only take 5 Just minutes .
This is it. D The role of , We have the right to D Understand it as braking , If it is still expressed in a coordinate diagram D Yes P The effect of regulation , That's it D send P The adjusted straight line becomes a curve , stay PID In the formula ,D Change is about P The curve of ,D The greater the value of , Yes P The greater the impact . Join in D The later curve is steeper in the early stage , It's faster to enter the station , The late period is smooth , So that the train can enter the station smoothly and accurately .

I believe after this explanation , Many model friends have understood PD The role of the , That's in the actual adjustment of the aircraft , We can have a definite aim . according to PD This relationship , We can get a regulation step : The first D Zeroing , enlarge P value , Make the aircraft overshoot properly and begin to vibrate , Then increase D The numerical , Pull it down P Regulate the role of late , Slow down overshoot , Finally, adjust it until it can't be rushed .P The bigger it is , The faster the aircraft recovers after tilting , The more sensitive it is , But the meeting has a shock ;D The bigger it is , The smoother the adjustment , The more stable it is , but D The adjustment time will be extended after the assembly , The performance is slow ( there D Refers to D The numerical , In a normal PID In the expression ,D The closer the 0,P The greater the effect , You need to pay attention to this ).
Finally, I will explain I The role of ,I It's integral , It is a parameter added to eliminate errors , Suppose in the above example , After the train stops , It's still far from the stop line of the final goal 1 rice , Although we can also think that this is a qualified parking , But this is error after all , If we recognize this 1 The error of meters , On this basis, the train will stop for the second time 2 The error of meters , So in the past , The error will be bigger and bigger , So we need to record this error , When the second stop, it can play a role , If it's bad 1 rice , The train driver can be in the original PD On the basis of adjustment I integral , Delay 1 Meter output ( Or in advance ), namely 999 Meters start to slow down , Finally, you can just reach the stop line . without I The role of , The performance on the multi axis aircraft platform is that the aircraft is more and more inclined , Eventually lose balance .I The regulation of is based on PD On the basis of ,PD Changes will affect I The effect of , So the final adjustment step is to adjust P Establish sensitivity , Then adjust D Adjust the smoothness , Final adjustment I Determine accuracy .
#include<reg51.h>
#include "intrins.h"
#include <lcd.H>
#define uchar unsigned char
#define uint unsigned int
#define GPIO_KEY P2
sbit PWM=P1^4;
sbit P10=P1^0;
sbit P12=P1^2;
uchar speed1[4]={
"0000"};// Set speed
uchar speed2[3]={
"000"};// Duty cycle
uchar speed[]={
"0000"};// Current speed
uchar KeyValue=0;
uint AA,count=0,flag;
float pid_p=0.003,pid_i=0.003,pid_d=0.002; //PID Three parameters initial value
uint SpeedSet=3000,CurrentSpeed;// Set speed Current speed
unsigned char pid_val_mid;//pid_val_mid Pulse width
unsigned int lastError=0;
long int sumError=0;//sum Deviations and
void delay1(unsigned int i)
{
unsigned int j;
for(;i>0;i--)
for(j=0;j<333;j++)
{
;}
}
/********************* Keyboard scanning *************/
void KeyDown(void)
{
GPIO_KEY=0x0f;
delay1(10);
if(GPIO_KEY!=0x0f)
{
delay1(10);
if(GPIO_KEY!=0x0f)
{
// Test column
GPIO_KEY=0X0F;
delay1(10);
switch(GPIO_KEY)
{
case(0X07): KeyValue=0;break;
case(0X0b): KeyValue=1;break;
case(0X0d): KeyValue=2;break;
case(0X0e): KeyValue=3;break;
}
// Test line
GPIO_KEY=0XF0;
delay1(10);
switch(GPIO_KEY)
{
case(0X70): KeyValue=KeyValue;break;
case(0Xb0): KeyValue=KeyValue+4;break;
case(0Xd0): KeyValue=KeyValue+8;break;
case(0Xe0): KeyValue=KeyValue+12;break;
}
}
}
}
void timer()
{
TMOD=0x11;// Timer 0 Operation mode 1.16 position , Timer 1 Operation mode 1,16 Bit timing ;
TH0=0x4b;//50ms initial value
TL0=0xfe;
TH1=0xfc;//1msPWM control
TL1=0x66;
TR1=1; // Start timer 1
ET1=1; // Timer 1 Interrupt enable
IT0=1;// The falling edge of the external interrupt triggers
TR0=1; // Timer start flag
ET0=1; // Timer interrupt enable
EX0=1; // External interrupt enable
EA=1; // Global interrupt
}
/***********************lcd Show *************/
void display()
{
speed[0]=CurrentSpeed/1000+0x30; // Current speed
speed[1]=CurrentSpeed/100%10+0x30;
speed[2]=CurrentSpeed/10%10+0x30;
speed[3]=CurrentSpeed%10+0x30;
speed1[0]=SpeedSet/1000+0x30;// Set speed
speed1[1]=SpeedSet/100%10+0x30;
speed1[2]=SpeedSet/10%10+0x30;
speed1[3]=SpeedSet%10+0x30;
speed2[0]=pid_val_mid/100+0x30;
speed2[1]=pid_val_mid/10%10+0x30;// Duty cycle
speed2[2]=pid_val_mid%10+0x30;
DispHanzi(0,0,5," Current speed :");
DispZimu(0,5,4,speed);
DispHanzi(1,0,5," Set speed :");
DispZimu(1,5,4,speed1);
DispHanzi(3,0,4," Duty cycle :");// Duty cycle
DispZimu(3,4,3,speed2);
DispHanzi(3,6,1,"%");// Duty cycle
}
/************************ Motor control *************/
void keyKZ()
{
if(KeyValue==4)// Positive rotation
{
P10=1;
P12=0;
}
if(KeyValue==5)// reverse
{
P10=0;
P12=1;
}
if(KeyValue==6)// Parking
{
P10=0;
P12=0;
}
if(KeyValue==12)// Set the speed plus 50
SpeedSet+=50;
if(KeyValue==13)// Set the speed deceleration 50
SpeedSet-=50;
if(KeyValue==14)// Set the speed plus 1
SpeedSet+=1;
if(KeyValue==15)// Set the speed deceleration 1
SpeedSet-=1;
KeyValue=0;
}
/************************PID Control algorithm *************/
unsigned int PID()
{
int dError=0,Error=0,B;
Error=SpeedSet-CurrentSpeed;// Current error = set speed - The actual speed
sumError=Error+sumError;// Error sum = Current error + Total error
dError=Error-lastError;// Error deviation = Current error - The last error
lastError=Error;// The last error
B=pid_p*Error+pid_i*sumError+pid_d*dError;
if(B>100) pid_val_mid=100;
if(B<0) pid_val_mid=0;
if(B>=0&&B<=100)
pid_val_mid=B;// Output pwm Pulse width
return(0);
}
void Timer0_isr() interrupt 1 // Timer 0 interrupt
{
AA++;
TH0=0x4b;
TL0=0xfe;
if(AA==20)
{
CurrentSpeed=count*3;// One minute speed
count=0;
AA=0;
PID();
}
}
void key_int() interrupt 0 // External interrupt P32 mouth
{
count++;
}
void Timer1() interrupt 3
{
static int c=0;
TH1=0xfc;
TL1=0x66;
c++; // Add... Every time the timer overflows 1
if(c<=pid_val_mid) PWM=1;
if(c>pid_val_mid) PWM=0;
if(c>=100) c=0;
}
void main()
{
timer();// Timer initialization
InitLCD();//LCD initialization
while(1)
{
KeyDown(); // Keyboard scanning
keyKZ();// Keyboard control
display();// Show LCD
}
}
边栏推荐
- Distance measurement - Hamming distance
- SWT / anr problem - SWT causes low memory killer (LMK)
- from pip._internal.cli.main import main ModuleNotFoundError: No module named ‘pip‘
- 13 MySQL-约束
- Is it safe to buy funds on Great Wall Securities?
- PostgreSQL notes (10) dynamically execute syntax parsing process
- 软件架构的本质
- 使用uni-simple-router,动态传参 TypeError: Cannot convert undefined or null to object
- Is there a piece of code that makes you convinced by human wisdom
- Commemorate becoming the first dayus200 tripartite demo contributor
猜你喜欢
Stm32f030f4 drives tim1637 nixie tube chip
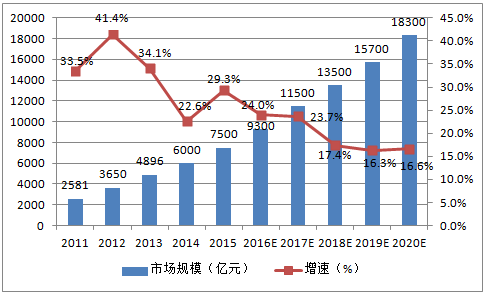
Current situation and future development trend of Internet of things
2021 RoboCom 世界机器人开发者大赛-高职组初赛
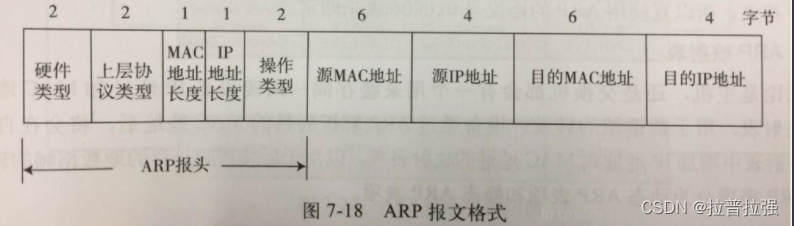
ARP message header format and request flow

Redis 主从同步
The best smart home open source system in 2022: introduction to Alexa, home assistant and homekit ecosystem

kubernetes资源对象介绍及常用命令(三)

电商RPA机器人,助力品牌电商抢立流量高点

SWT / anr problem - SWT causes kernel fuse deadlock

Distance measurement - Hamming distance
随机推荐
Matplotlib common settings
PostgreSQL source code (58) tuple splicing heap_ form_ Tuple analysis
Yunxin small class | common cognitive misunderstandings in IM and audio and video
. env. XXX file, with constant, but undefined
How excel opens CSV files with more than one million lines
golang中的iota
Postgresql随手记(10)动态执行EXECUTING语法解析过程
Postgresql源码(58)元组拼接heap_form_tuple剖析
cookie、session、tooken
Daily three questions 6.30
ADO.NET 之sqlConnection 对象使用摘要
What are the common types of points mall games?
SWT / anr problem - SWT causes kernel fuse deadlock
TS initial use, TS type
2021 robocom world robot developer competition - semi finals of higher vocational group
notBlank 和 notEmpty
Depth first search and breadth first search of graph traversal
距离度量 —— 汉明距离(Hamming Distance)
ShanDong Multi-University Training #3
Redis AOF日志