当前位置:网站首页>PSINS中19维组合导航模块sinsgps详解(滤波部分)
PSINS中19维组合导航模块sinsgps详解(滤波部分)
2022-07-06 19:13:00 【python小白(下阶段小黑)】
PSINS中19维组合导航模块sinsgps详解
滤波部分
for k=1:nn:len-nn+1
k1 = k+nn-1;
wvm = imu(k:k1,1:6); t = imu(k1,end);
ins = insupdate(ins, wvm);
上述代码先进行的是惯导算法更新
2.kf.Phikk_1 = kffk(ins);为创建卡尔曼滤波的状态转移矩阵
3.kf = kfupdate(kf);卡尔曼滤波的时间更新
4. [kgps, dt] = imugpssyn(k, k1, 'F');是计算imu和gps对应的时间差值dt,和gps数据所在的行数kgps
5. measflag = 0;量测更新方法标识的初始化
6. ins = inslever(ins); 为进行杆臂补偿
7.
if kgps>0
dtpos=+vn2dpos(ins.eth,ins.vnL,ins.tDelay);
上述代码块表示为,计算ins.tDelay时间内的位置增量
8.
if gpspos_only==1
measflag = 2;
zk = ins.posL+dtpos-gps(kgps,1:3)';
kf.Hk = [zeros(3,6), eye(3), zeros(3,6), -ins.MpvCnb,-ins.Mpvvn];
else
measflag = 3;
zk = [ins.vnL+ins.tDelay*ins.anbar;ins.posL+dtpos]-gps(kgps,1:6)';
kf.Hk = [zeros(6,3), eye(6), zeros(6,6), [-ins.CW,-ins.anbar;-ins.MpvCnb,-ins.Mpvvn]];
end
上述代码为根据gps提供的观测量的维度,设计卡尔曼滤波的观测值zk和系数矩阵Hk
9. kf = kfupdate(kf, zk, 'M');为进行卡尔曼滤波的量测更新
10. 10.zkrk(kiz,:) = [zk; diag(kf.Rk); t]; kiz = kiz+1; 数据存储
11. [kf, ins] = kffeedback(kf, ins, nts);卡尔曼滤波的反馈校正
12.
avp(ki,:) = [ins.att; ins.vnL; ins.posL; ins.eb; ins.db; t]';
xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]';
sk(ki,:) = [measflag, t]; ki = ki+1;
数据存储
·······································································································
理解不足之处,还请赐教!
·······································································································
边栏推荐
- Redis入门完整教程:复制配置
- 实施MES管理系统时,哪些管理点是需要注意的
- Compress JS code with terser
- HAVE FUN | “飞船计划”活动最新进展
- C语言练习题_1
- Electrical engineering and automation
- C#/VB. Net to delete watermarks in word documents
- Leetcode:minimum_ depth_ of_ binary_ Tree solutions
- Go swagger use
- Google Earth engine (GEE) -- 1975 dataset of Landsat global land survey
猜你喜欢

How to design interface test cases? Teach you a few tips to draft easily
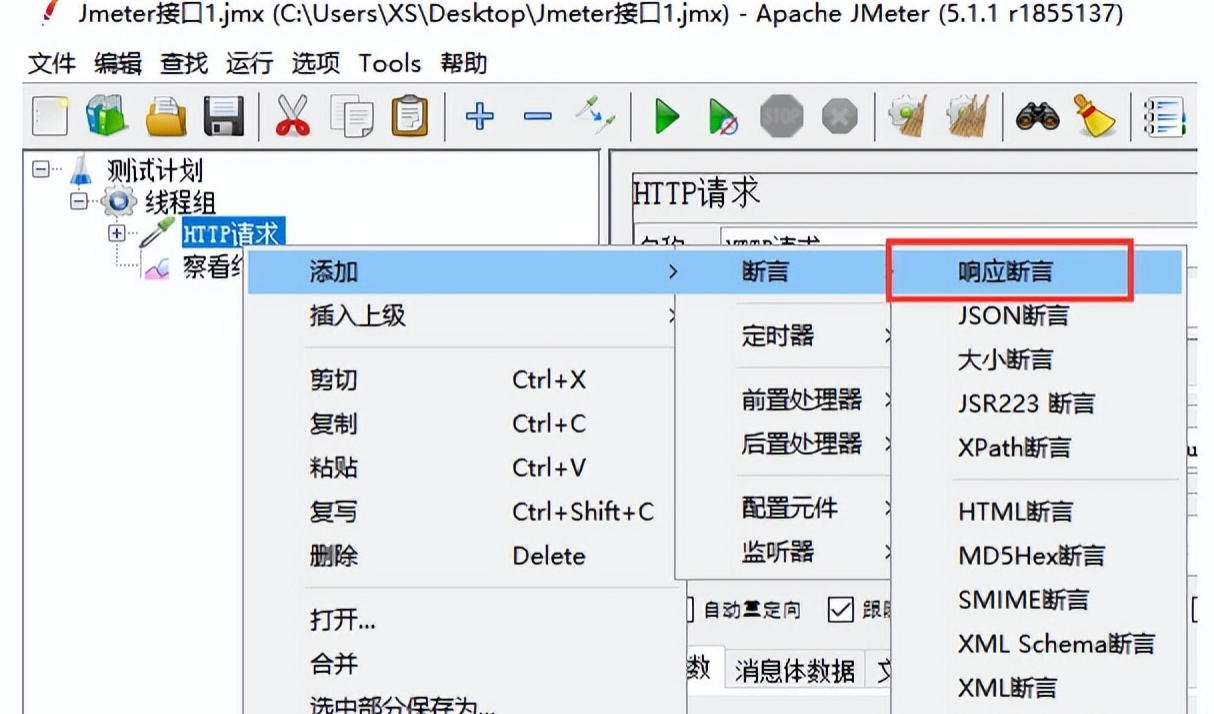
软件测试——Jmeter接口测试之常用断言
Niuke programming problem -- double pointer of 101 must be brushed

服装企业部署MES管理系统的五个原因
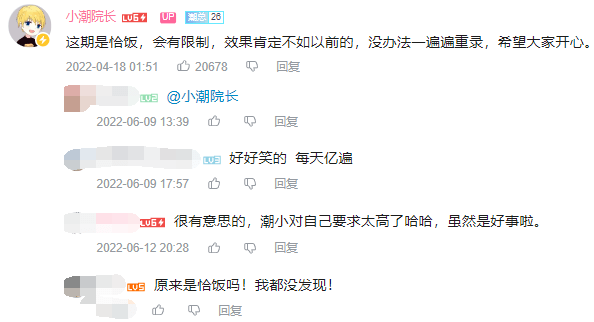
1个月增长900w+播放!总结B站顶流恰饭的2个新趋势
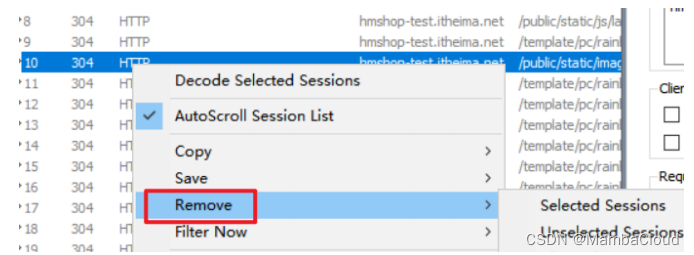
Use of fiddler
dotConnect for DB2数据提供者

Cloud Mail . NET Edition
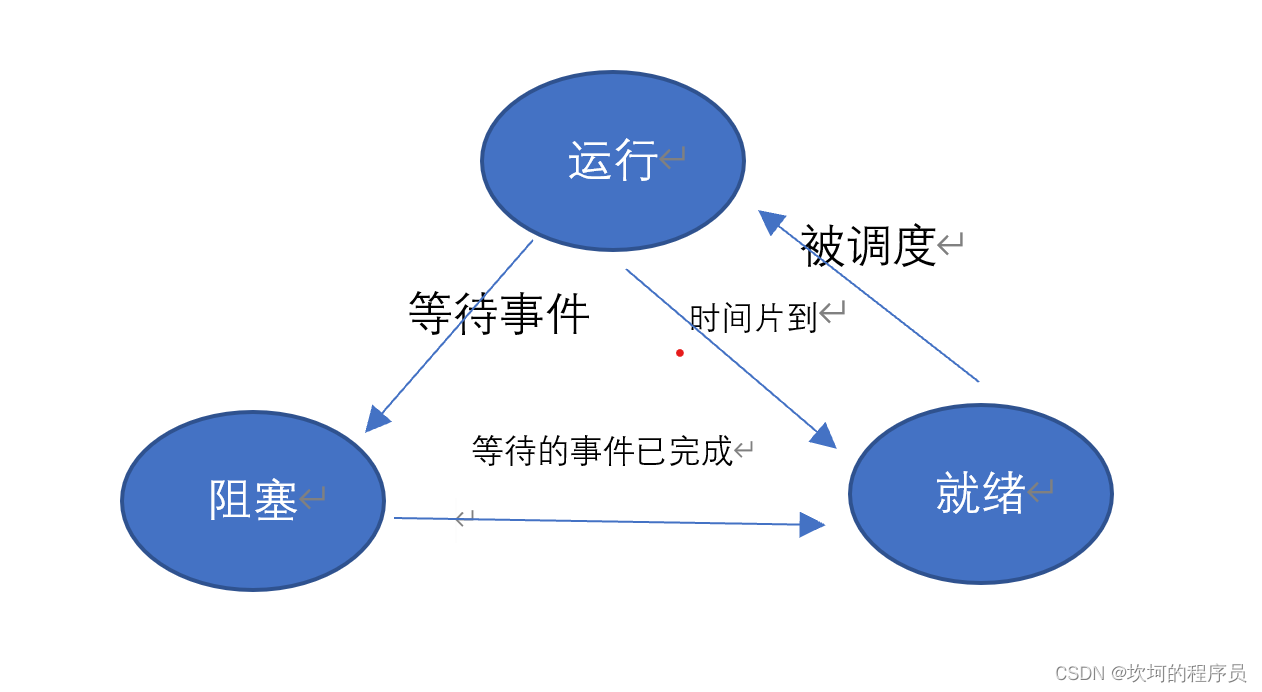
Fundamentals of process management
MySQL --- 常用函数 - 字符串函数
随机推荐
Halcon instance to opencvsharp (C openCV) implementation -- bottle mouth defect detection (with source code)
Redis入门完整教程:AOF持久化
[node learning notes] the chokidar module realizes file monitoring
Dotconnect for DB2 Data Provider
MySQL is an optimization artifact to improve the efficiency of massive data query
Contribution of Writing Series
LeetCode 77:组合
How to write test cases for test coupons?
Leetcode:minimum_depth_of_binary_tree解决问题的方法
Ali yunyili: how does yunyuansheng solve the problem of reducing costs and improving efficiency?
A new path for enterprise mid Platform Construction -- low code platform
wzoi 1~200
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
Compress JS code with terser
PCL 常用拟合模型及使用方法
Redis入门完整教程:客户端案例分析
unity 自定义webgl打包模板
从零安装Redis
Mmdetection3d loads millimeter wave radar data
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?