当前位置:网站首页>Five "potential errors" in embedded programming
Five "potential errors" in embedded programming
2022-07-04 13:51:00 【Li Xiaoyao】
Focus on 、 Official account of star standard , Straight to the highlights

source : Online material
Finding and eliminating potential errors in embedded development software is a difficult task .
It usually takes heroic effort and expensive tools to recover from the observed collapse , Crash or other unplanned runtime behavior can be traced back to the root cause .
In the worst case , The root cause can destroy code or data , Make the system appear to work properly or at least for a period of time .
Engineers often give up trying to find the cause of unusual anomalies , These anomalies are not easy to reproduce in the laboratory , Treat it as a user error or “ A glitch ”.
However , These ghosts in the machine still exist . This is the most common root cause guide for errors that are difficult to reproduce . Whenever you read the firmware source code , Please look for the following five main errors . And follow recommended best practices , To prevent them from happening to you again .
error 1: Competitive conditions
A race condition refers to two or more execution threads ( It can be RTOS Task or main() And interrupt handlers ) Any situation in which the combination result of changes according to the precise order of interleaving instructions . Each is executed on the processor .
for example , Suppose you have two execution threads , One of them regularly increments a global variable (g_counter + = 1; ), And another accidentally returns it to zero (g_counter = 0; ). If you can't always be atomic ( namely , In a single instruction cycle ) Execute incremental , There are competitive conditions .
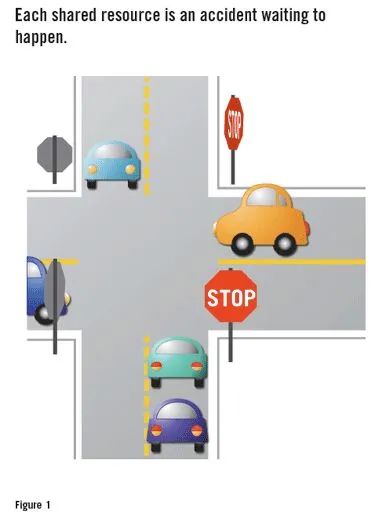
Pictured 1 Shown , Think of the task as a car approaching the same intersection . A conflict between two updates of a counter variable may never occur , Or it rarely happens . however , When you do that , The counter does not actually clear in memory . Its value is corrupted at least until the next reset . This effect may have serious consequences for the system , Although it may not appear until a long time after the actual collision .
Best practices : You can execute key parts of the code atomically by having to restrict behavior with appropriate preemption , To avoid competitive conditions . To prevent the involvement of ISR Contention for , At least one interrupt signal must be disabled for the duration of a critical part of another code .
about RTOS Contention between tasks , The best practice is to create mutexes specific to the shared library , Each mutex must be obtained before entering the key part . Please note that , Rely on specific CPU To ensure atomicity is not a good idea , Because this can only prevent contention , Until you change the compiler or CPU.
Sharing data and seizing random time are the culprits of the competitive situation . But mistakes may not always happen , This makes it extremely difficult to track race status from observed symptoms to root causes . therefore , It is important to be vigilant to protect all shared objects . Each shared object is an accident waiting to happen .
Best practices : Name all potentially shared objects ( Including global variables , Heap object or peripheral register and pointer to the object ), So that the risk is obvious to all future code readers ; stay Netrino The embedded C The coding standard advocates the use of “ Of G_ So ,” Prefix . Finding all possible shared objects will be the first step in the contention condition code audit .
error 2: Non reentrant function
Technically speaking , The problem of non reentrant function is a special case of contention problem . and , For related reasons , Runtime errors caused by non reentrant functions usually do not occur in a reproducible manner - Make them equally difficult to debug .
Unfortunately , Non reentrant features are also more difficult to detect in code reviews than other types of competitive conditions .
chart 2 Shows a typical scenario . ad locum , The software entities to be preempted are also RTOS Mission . however , Instead of directly calling shared objects, they operate indirectly through function calls .
for example , Suppose the task A Call the socket layer protocol function , The socket function calls TCP Layer protocol function , call IP Layer protocol function , This function calls the Ethernet driver . In order to make the system operate reliably , All these functions must be reentrant .
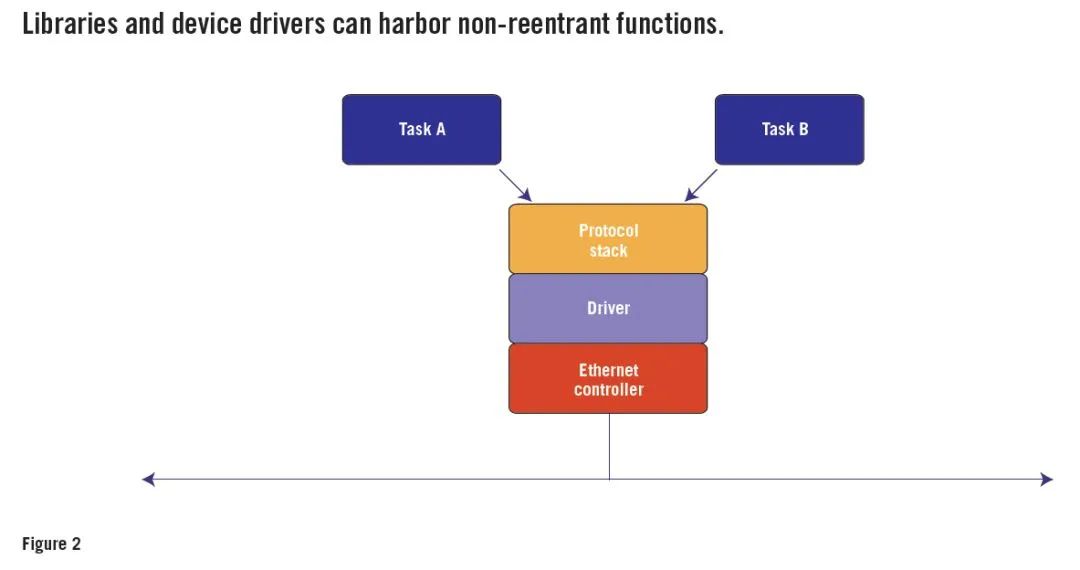
however , All functions of the Ethernet driver operate the same global object in the form of registers of the Ethernet controller chip . If preemption is allowed during these register operations , Then the task B You can send packets A Preempt tasks after queuing but before sending starts A.
then , Mission B Call the socket layer function , The socket layer function calls TCP Layer function , Call again IP Layer function , This function calls the Ethernet driver , The queue sends packets B Queue and transmit . When CPU Return control to the task A when , It will request transmission . According to the design of Ethernet controller chip , This may retransmit packets B Or make mistakes . Data packets A The loss of , And will not be sent to the network .
For the sake of multiple at the same time RTOS The function of calling Ethernet driver in middle note , They must be reentrant . If they each use only stack variables , There is nothing to do .
therefore ,C The most common style of a function is inherently reentrant . however , Unless it's carefully designed , Otherwise, drivers and some other functions will not be reentrant .
The key to making the function reentrant is to pause the processing of peripheral registers , Including static local variables , Preemption of all accesses to global variables including persistent heap objects and shared memory areas . This can be done by disabling one or more interrupts or acquiring and releasing mutexes . The details of the problem determine the best solution .
Best practices : Create and hide a mutex in each library or driver module , These mutexes are not inherently reentrant . Make obtaining this mutex a prerequisite for operating on any persistent data or shared registers used in the entire module .
for example , The same mutex can be used to prevent contention involving Ethernet controller registers and global or static local packet counters . Before accessing this data , All functions accessing this data in the module must follow the protocol to obtain the mutex .
Note that the non reentrant function may act as a third-party middleware , Old code or part of the device driver enters your code base .
What is disturbing is , Non reentrant functions may even be the standard that comes with the compiler C or C ++ Part of the library . If you use GNU Compiler to build based on RTOS Applications for , Please note that you should use reentrant “ newlib” standard C library , Instead of the default library .
error 3: The lack of volatile keyword
If not used C Of volatile Keyword to mark certain types of variables , It may cause many unexpected behaviors in systems that only set the optimizer of the compiler to low-level or disable the compiler to work properly . The variable declaration during this qualifier , Its purpose is to prevent optimized reading and variable writing .
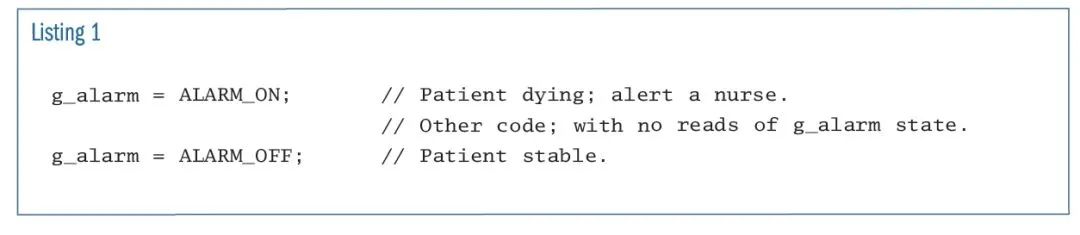
for example , If you write a list 1 Code shown , The optimizer may try to make the program faster by eliminating the first line , smaller , Thus damaging the patient's health . however , If you will g_alarm Declare as volatile , Then this optimization will not be allowed .
Best practices : Will volatilize The keyword of should be used to declare each :
from ISR And any other part of the code ,
By two or more RTOS Global variables accessed by the task ( Even if the competitive conditions in these accesses have been blocked ),
Points to the memory mapped peripheral register ( Or a set or a set of registers ) The pointer to , as well as
Delay cycle counter .
Please note that , In addition to ensuring that all read and write operations are for the given variable , Use volatile Also by adding other “ Sequence point ” To limit the compiler . Volatile access other than reading or writing volatile variables must be performed before the access .
error 4: stack overflow
Every programmer knows that stack overflow is a bad thing . however , The impact of each stack overflow is different . The nature of damage and the timing of misconduct depend entirely on what data or instructions are destroyed and how they are used . It is important to , The time between the stack overflow and its negative impact on the system depends on the time before the blocking bit is used .
Unfortunately , Stack overflow is more vulnerable to embedded systems than desktop computers . There are several reasons for this , These include :
(1) Embedded systems usually take up less space RAM;
(2) Usually there is no virtual memory to fallback ( Because there is no disk );
(3) be based on RTOS The firmware design of the task utilizes multiple stacks ( One for each task ), Each stack must be large enough , Ensure that the worst-case scenario does not occur at the depth of the stack ;
(4) Interrupt handlers may try to use these same stacks .
What further complicates the problem is , No amount of testing can ensure that a particular stack is large enough . You can test the system under various loading conditions , But it can only be tested for a long time . Only in “ Half a blue moon ” Tests run in may not be witnessed only in “ A blue moon ” Stack overflow in . In algorithmic constraints ( For example, no recursion ) Next , It can be proved that stack overflow will not occur by top-down analysis of the control flow of the code . however , Every time you change the code , All need to redo the top-down analysis .
Best practices : Startup time , Draw unlikely memory patterns across the stack .( I like to use hexadecimal 23 3D 3D 23, It looks like ASCII Fence in memory dump ' #==# '.) At run time , Ask the administrator task to check periodically whether any paint has changed above the preset high water level .
If you find a problem with a stack , Please record in nonvolatile memory ( For example, which stack and the height of the flood ), And do something safe for the users of the product ( for example , Controlled shutdown or reset ) There may be a real overflow . This is a nice additional security feature added to the watchdog task .
error 5: Heap fragmentation
Embedded development engineers do not make good use of dynamic memory allocation . One of them is the problem of heap fragments .
adopt C Of malloc() Standard library routines or C ++ Of new All data structures created by keywords reside in the heap . The pile is RAM A specific area with a predetermined maximum size in . first , Each allocation in the heap reduces the remaining number of bytes by the same amount “ You can use ” Space .
for example , The heap in a particular system may be from the address 0x20200000 Start crossing 10 KB. a pair 4 KB The allocation of data structures will leave 2 KB Free space for .
You can call free() Or use delete Keyword returns the storage of data structures that are no longer needed to the heap . In theory , This makes the storage space available for reuse during subsequent allocations . But the order of allocation and deletion is usually at least pseudo-random , This causes the pile to become a pile of smaller pieces .
To view fragments can be a problem , Please consider the above if 4 KB What happens when the data structure is first idle . Now? , The pile consists of a 4 KB Free block and another 2 KB Consists of free blocks . They are not adjacent , Can't merge . So our heap has been divided . Although the total free space is 6 KB, But more than 4 KB The assignment of will fail .
Fragments are similar to entropy : Both increase over time . In a long-running system ( let me put it another way , Most embedded systems ever created ) in , Fragmentation may eventually cause some allocation requests to fail . so what ? How should your firmware handle a heap allocation request failure ?
Best practices : Avoiding full heap usage is a sure way to prevent this error . however , If dynamic memory allocation is necessary or convenient in your system , You can use another method of structured heap to prevent fragmentation .
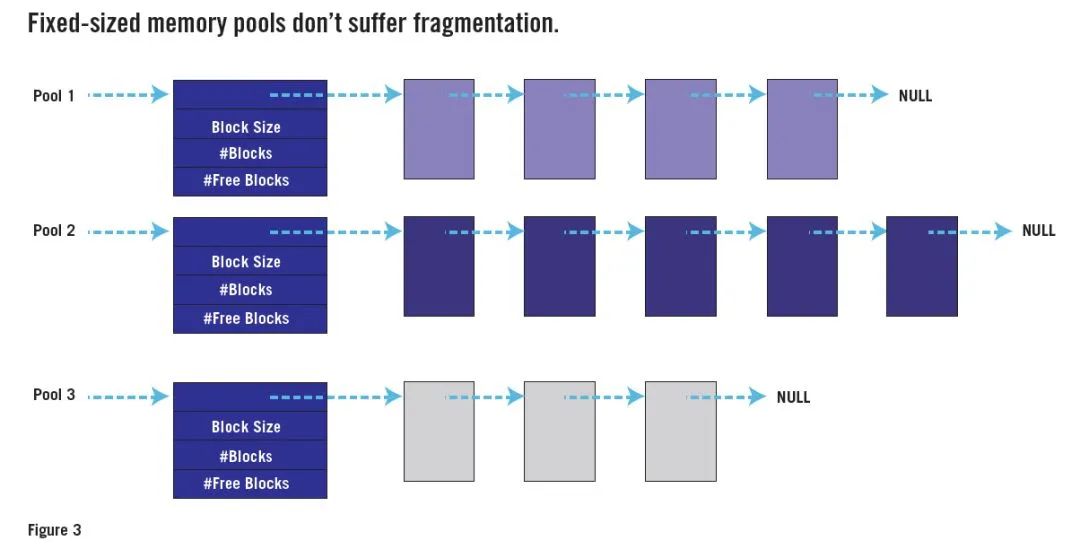
The key observation is that the problem is caused by variable size requests . If all requests are the same size , Then any free block will be as good as any other block , Even if it happens not to be adjacent to any other free block . chart 3 Shows how to put multiple “ Pile up ”( Each allocation request for a specific size ) The use of is realized as “ Memory pool ” data structure .
Many real-time operating systems have fixed size memory pools API. If you can access one of them , Please use it instead of malloc() and free() . Or write your own fixed size memory pool API. You only need three functions : One for creating a new pool ( The size is M block N byte ); The other allocates a block ( From the specified pool ); One third replace free() .
Code review is still a best practice , You can avoid a lot of debugging trouble by first ensuring that these errors do not exist in the system . The best way is to have people inside or outside the company conduct a comprehensive code review . Standard rule coding that enforces the best practices I describe here should also help . If you suspect one of these annoying errors in existing code , Then performing a code review may be faster than trying to trace the observed failure to the root cause .
Copyright notice : Source network of this paper , Free delivery of knowledge , The copyright belongs to the original author . If involves the work copyright question , Please contact me to delete .
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
Pay attention to my WeChat official account , reply “ Add group ” Join the technical exchange group according to the rules . Click on “ Read the original ” See more sharing , Welcome to share 、 Collection 、 give the thumbs-up 、 Looking at .边栏推荐
- Runc hang causes the kubernetes node notready
- . Net delay queue
- CTF competition problem solution STM32 reverse introduction
- Rsyslog configuration and use tutorial
- It is six orders of magnitude faster than the quantum chemical method. An adiabatic artificial neural network method based on adiabatic state can accelerate the simulation of dual nitrogen benzene der
- ViewBinding和DataBinding的理解和区别
- 爬虫练习题(一)
- 实战:fabric 用户证书吊销操作流程
- C语言图书租赁管理系统
- Reptile exercises (I)
猜你喜欢
Flet tutorial 03 basic introduction to filledbutton (tutorial includes source code) (tutorial includes source code)
CTF competition problem solution STM32 reverse introduction
Node の MongoDB安装
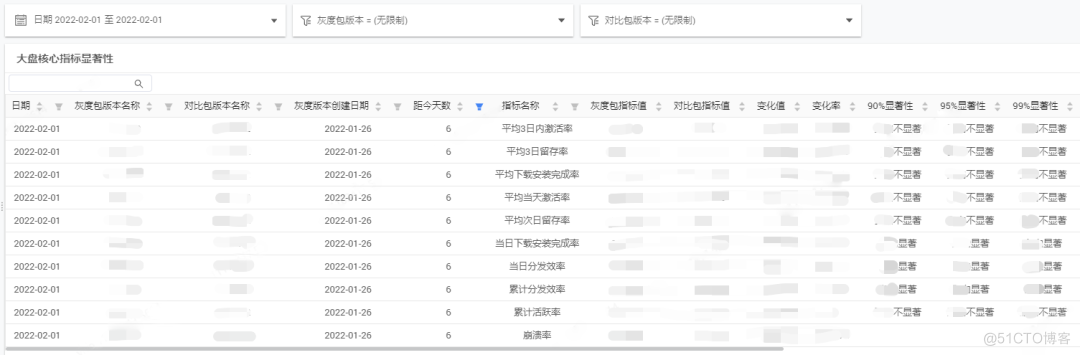
Building intelligent gray-scale data system from 0 to 1: Taking vivo game center as an example
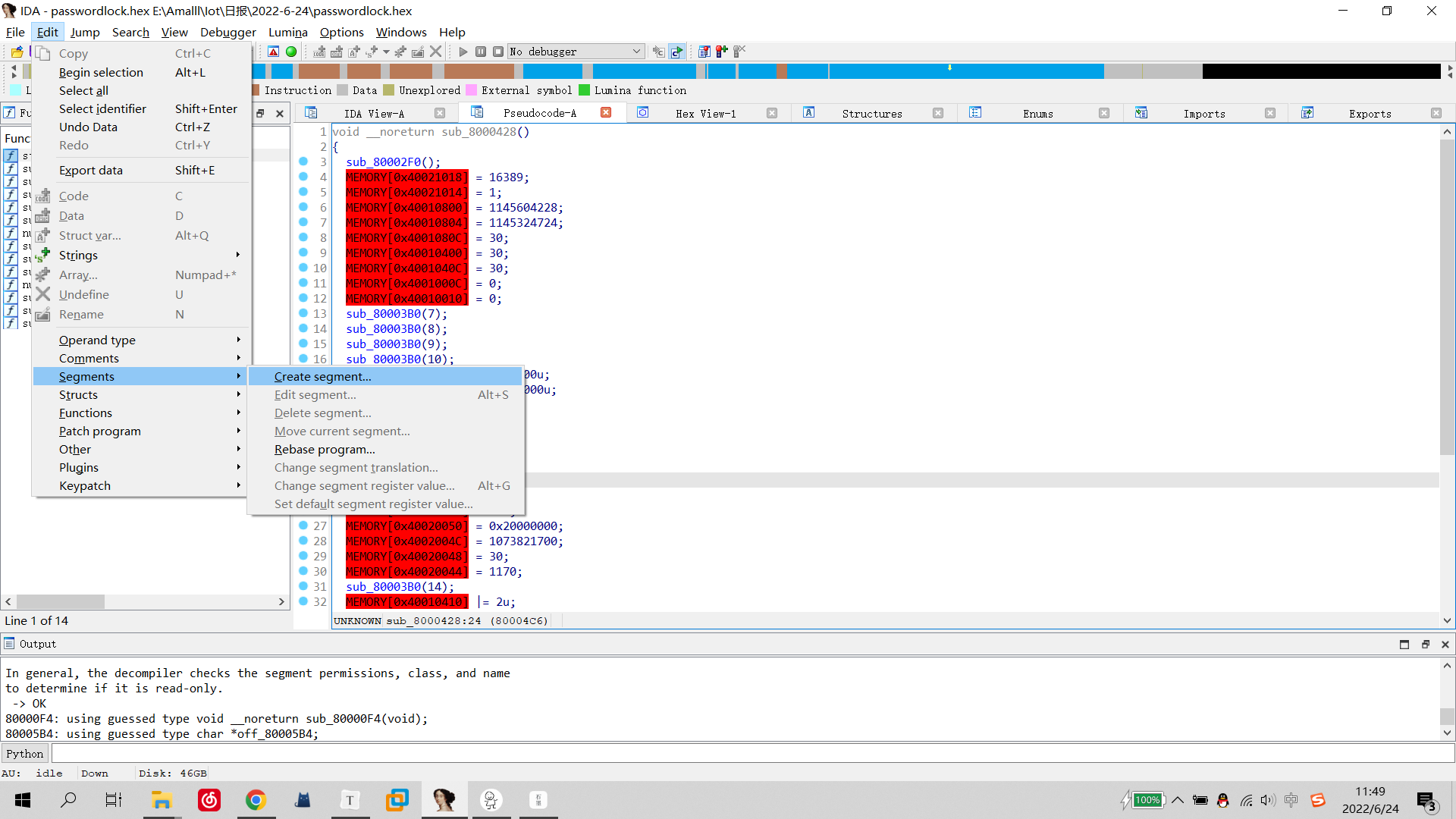
Introduction to reverse debugging PE structure resource table 07/07

Getting started with the go language is simple: go implements the Caesar password
"Pre training weekly" issue 52: shielding visual pre training and goal-oriented dialogue

2022kdd pre lecture | 11 first-class scholars take you to unlock excellent papers in advance
实战:fabric 用户证书吊销操作流程
逆向调试入门-PE结构-资源表07/07
随机推荐
C语言集合运算
高质量软件架构的唯一核心指标
上汽大通MAXUS正式发布全新品牌“MIFA”,旗舰产品MIFA 9正式亮相!
[AI system frontier dynamics, issue 40] Hinton: my deep learning career and research mind method; Google refutes rumors and gives up tensorflow; The apotheosis framework is officially open source
C语言小型商品管理系统
. Net delay queue
js中的变量提升和函数提升
Annual comprehensive analysis of China's mobile reading market in 2022
Byte interview algorithm question
SQL language
Web知识补充
Oracle was named the champion of Digital Innovation Award by Ventana research
C语言宿舍管理查询软件
2022G3锅炉水处理考试题模拟考试题库及模拟考试
美国土安全部长:国内暴力极端主义是目前美面临的最大恐怖主义威胁之一
[cloud native | kubernetes] in depth understanding of ingress (12)
程序员转方向
Go 语言入门很简单:Go 实现凯撒密码
Apache server access log access Log settings
Redis —— How To Install Redis And Configuration(如何快速在 Ubuntu18.04 与 CentOS7.6 Linux 系统上安装 Redis)