当前位置:网站首页>Technical solution of vision and manipulator calibration system
Technical solution of vision and manipulator calibration system
2022-07-02 21:42:00 【Xiaobai learns vision】
Click on the above “ Xiaobai studies vision ”, Optional plus " Star standard " or “ Roof placement ”
Heavy dry goods , First time delivery 
One 、 Two cases of hand eye calibration
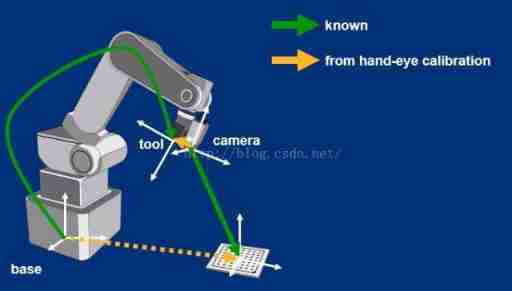
First, let's talk about industrial applications , Hands and eyes ( The camera ) Two positional relationships , The first is to put the camera ( eye ) Fixed on the manipulator ( hand ) above , Move your eyes with your hands ; The second is the camera ( eye ) And manipulator ( hand ) Separate , The position of the eye is fixed relative to the hand , Here are two pictures on the Internet to illustrate :

Case one : Camera movement
The second case : The camera is fixed
As can be seen from the above two schematic diagrams , In the first case, we require the transformation relationship between the camera coordinate system and the manipulator coordinate system ; In the second case, the relationship between the camera coordinate system and the basic coordinate system is required ; The following describes the solution process .
Two 、 When the camera moves , Calibration solution process
In the derivation , We'll use four coordinate systems , They are the basic coordinate system , Manipulator coordinate system , Camera coordinate system , And the coordinate system of the calibration object , The following is a schematic diagram :
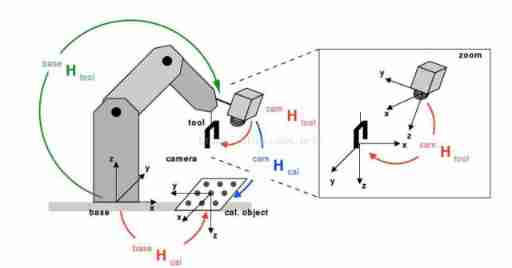
among baseHcal Represents the transformation relationship from the basic coordinate system to the calibration object coordinate system , Including rotation matrix and translation vector ;camHtool Represents the transformation relationship from camera coordinate system to manipulator coordinate system ; These two transformation relations remain unchanged during the movement of the manipulator ;camHcal It can be calculated by camera calibration ;baseHtool Can be derived from the robot system .
Next, control the robot hand from the position 1 Move to location 2:
base = baseHtool (1)* tool(1)
tool(1) = inv(camHtool)*cam(1)
cam(1) = camHcal(1)*obj
Combine the above three formulas :
base = baseHtool (1)* inv(camHtool)* camHcal(1)*obj
Move to the robot position 2 after :
base = baseHtool (2)* inv(camHtool)* camHcal(2)*obj
because base and obj It's fixed, so :
baseHtool (1)* inv(camHtool)* camHcal(1)=baseHtool (2)* inv(camHtool)* camHcal(2)
Only one camHtool It's an unknown quantity , The specific solution process will be put in the next article .
3、 ... and 、 When the camera is fixed , Calibration solution process

In the case of a fixed camera , Or control the manipulator from the position 1 Move to location 2:
obj(1) = inv(camHcal(1)) *cam
cam = camHbase *base
base = baseHtool(1) * tool(1)
Combine the above three formulas :
obj(1) = inv(camHcal(1)) * camHbase* baseHtool(1) *tool(1)
Move to location 2 after :
obj(2) = inv(camHcal(2)) * camHbase* baseHtool(2) *tool(2)
because obj and tool The relative position of is constant , So no matter how you move :
inv(camHcal(1)) * camHbase* baseHtool(1)= inv(camHcal(2)) * camHbase* baseHtool(2)
There are only variables camHbase, That's what we're asking for .
download 1:OpenCV-Contrib Chinese version of extension module
stay 「 Xiaobai studies vision 」 Official account back office reply : Extension module Chinese course , You can download the first copy of the whole network OpenCV Extension module tutorial Chinese version , cover Expansion module installation 、SFM Algorithm 、 Stereo vision 、 Target tracking 、 Biological vision 、 Super resolution processing And more than 20 chapters .
download 2:Python Visual combat project 52 speak
stay 「 Xiaobai studies vision 」 Official account back office reply :Python Visual combat project , You can download the Image segmentation 、 Mask detection 、 Lane line detection 、 Vehicle count 、 Add Eyeliner 、 License plate recognition 、 Character recognition 、 Emotional tests 、 Text content extraction 、 face recognition etc. 31 A visual combat project , Help fast school computer vision .
download 3:OpenCV Actual project 20 speak
stay 「 Xiaobai studies vision 」 Official account back office reply :OpenCV Actual project 20 speak , You can download the 20 Based on OpenCV Realization 20 individual Actual project , Realization OpenCV Learn advanced .
Communication group
Welcome to join the official account reader group to communicate with your colleagues , There are SLAM、 3 d visual 、 sensor 、 Autopilot 、 Computational photography 、 testing 、 Division 、 distinguish 、 Medical imaging 、GAN、 Wechat groups such as algorithm competition ( It will be subdivided gradually in the future ), Please scan the following micro signal clustering , remarks :” nickname + School / company + Research direction “, for example :” Zhang San + Shanghai Jiaotong University + Vision SLAM“. Please note... According to the format , Otherwise, it will not pass . After successful addition, they will be invited to relevant wechat groups according to the research direction . Do not Send ads within the group , Or you'll be invited out , Thanks for your understanding ~
边栏推荐
- [shutter] statefulwidget component (floatingactionbutton component | refreshindicator component)
- MySQL learning notes (Advanced)
- Welfare, let me introduce you to someone
- 读博士吧,研究奶牛的那种!鲁汶大学 Livestock Technology 组博士招生,牛奶质量监测...
- B.Odd Swap Sort(Codeforces Round #771 (Div. 2))
- Chargement de l'image pyqt après décodage et codage de l'image
- kernel tty_ struct
- [dynamic planning] p1220: interval DP: turn off the street lights
- Capacity expansion mechanism of ArrayList
- How to prevent your jar from being decompiled?
猜你喜欢
How is LinkedList added?

One week dynamics of dragon lizard community | 2.07-2.13
MySQL learning record (3)

Today, I met a Alipay and took out 35K. It's really sandpaper to wipe my ass. it's a show for me

I drew a Gu ailing with characters!
Hot backup routing protocol (HSRP)
![[hands on deep learning]02 softmax regression](/img/47/eb67ec2c51f6bb7d6b2879b36e769d.jpg)
[hands on deep learning]02 softmax regression

地理探测器原理介绍
![[shutter] shutter layout component (physicalmodel component)](/img/6a/f8161fb7c8e9012456622f1920da64.gif)
[shutter] shutter layout component (physicalmodel component)

Report on investment development and strategic recommendations of China's vibration isolator market, 2022-2027
随机推荐
Blue Bridge Cup Winter vacation homework (DFS backtracking + pruning)
Today, I met a Alipay and took out 35K. It's really sandpaper to wipe my ass. it's a show for me
[CV] Wu Enda machine learning course notes | Chapter 12
Construction and maintenance of business website [5]
Go web programming practice (2) -- process control statement
Huawei Hongmeng watch achieves fireworks display effect on New Year's Eve
Analysis of enterprise financial statements [4]
Capacity expansion mechanism of ArrayList
MySQL learning record (3)
Basic IO interface technology - microcomputer Chapter 7 Notes
Accounting regulations and professional ethics [16]
MySQL learning record (9)
Off chip ADC commissioning record
Accounting regulations and professional ethics [19]
Cloud computing technology [2]
~91 rotation
System (hierarchical) clustering method and SPSS implementation
How is LinkedList added?
China microporous membrane filtration market trend report, technological innovation and market forecast
rwctf2022_ QLaaS