当前位置:网站首页>Multi sensor fusion of imu/ optical mouse / wheel encoder (nonlinear Kalman filter)
Multi sensor fusion of imu/ optical mouse / wheel encoder (nonlinear Kalman filter)
2022-07-05 23:04:00 【Delusional industrial pharmacist】
Analysis of each sensor
imu
For planar mobile robots ( Like a robot sweeping the floor ),IMU It only needs the yaw angle of the gyroscope (YAW), There is time drift error in the yaw angle of the gyroscope , It is generally divided into system drift error (offset) And random time drift error .
Wheel encoder
There's nothing to say , The two wheeled differential robot has a corresponding motion model , The cumulative error gradually increases with factors such as slipping . It is necessary to calibrate the wheel diameter and the center distance between the two wheels , There are many calibration methods (todo: Update three calibration methods ).
Photoelectric mouse sensor
It can be measured xy Offset , It's important to put it in different positions and methods of the robot .
Kalman fusion filter
prediction model
The model is the model of two differential wheels , Here we need to do a partial derivative , Calculate the Jacobian matrix , State transition matrix F, That is, it reflects nonlinearity , Others can follow the flow of Kalman Filter Algorithm .
Starting model variance P0 Set to 0.1× Unit matrix , Process noise Q From small to large .
Observation model
todo
Make a state transformation matrix H come out
Measure noise covariance R According to static / Linear motion and circular motion are counted , Figure out ×9 times ( according to 3sigma Gaussian noise model to deal with )
边栏推荐
- Unity Max and min constraint adjustment
- CorelDRAW plug-in -- GMS plug-in development -- new project -- macro recording -- VBA editing -- debugging skills -- CDR plug-in (2)
- APK加固技术的演变,APK加固技术和不足之处
- 513. Find the value in the lower left corner of the tree
- Error when LabVIEW opens Ni instance finder
- Simple and beautiful method of PPT color matching
- openresty ngx_lua正则表达式
- Tensor attribute statistics
- d3dx9_ What if 29.dll is missing? System missing d3dx9_ Solution of 29.dll file
- Google Maps case
猜你喜欢
东南亚电商指南,卖家如何布局东南亚市场?
Unity Max and min constraint adjustment
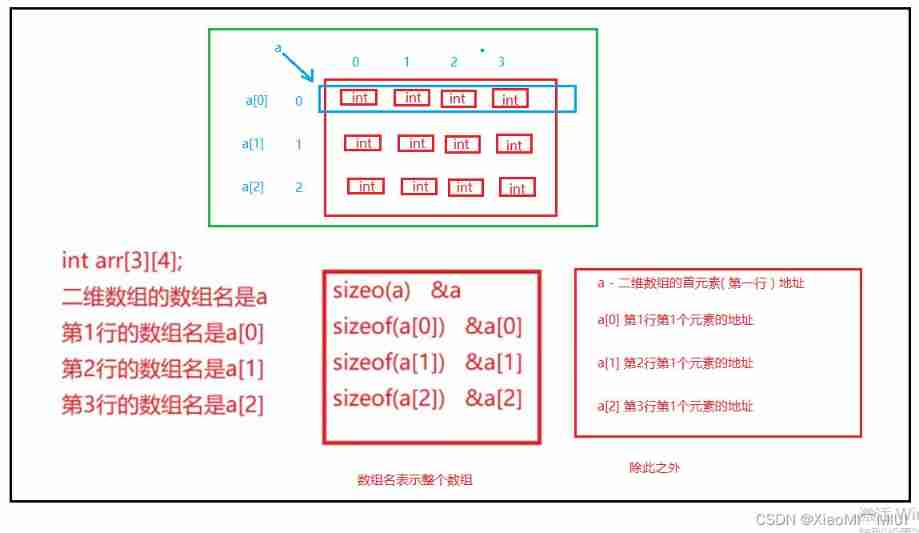
Detailed explanation of pointer and array written test of C language
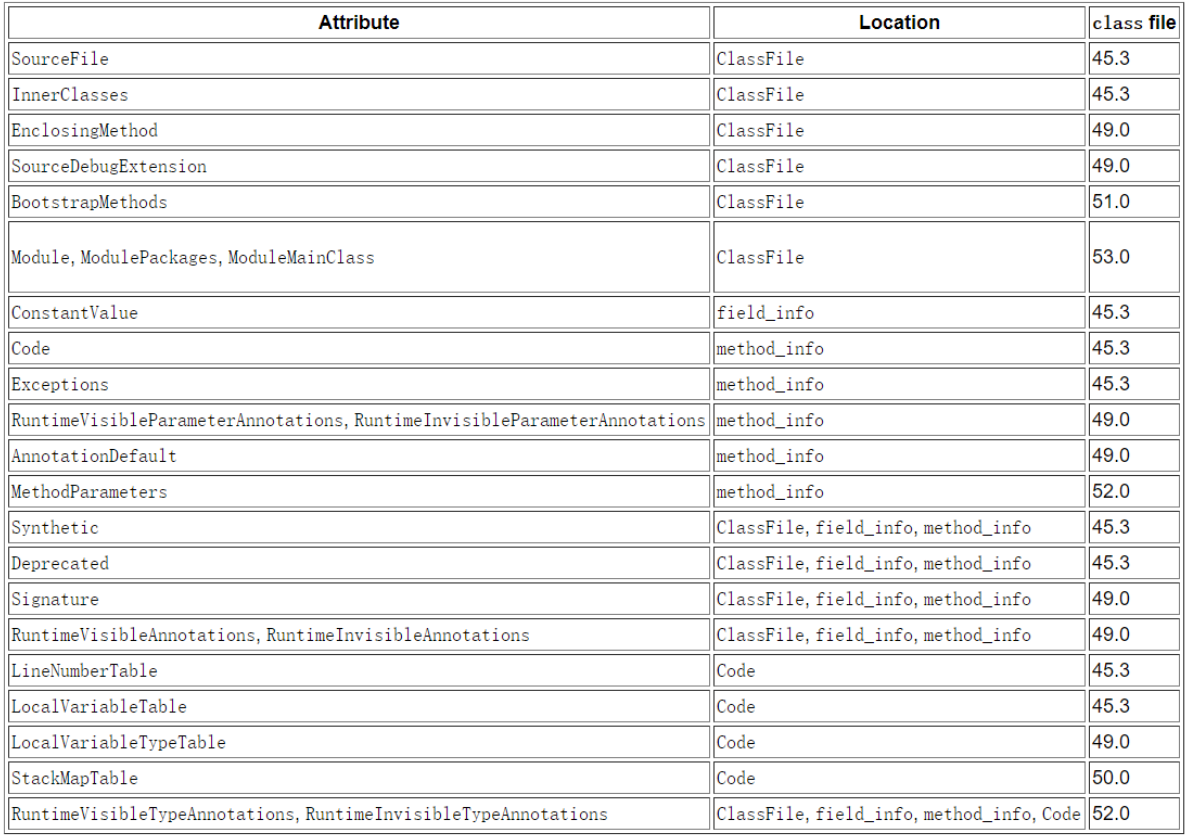
One article deals with the microstructure and instructions of class
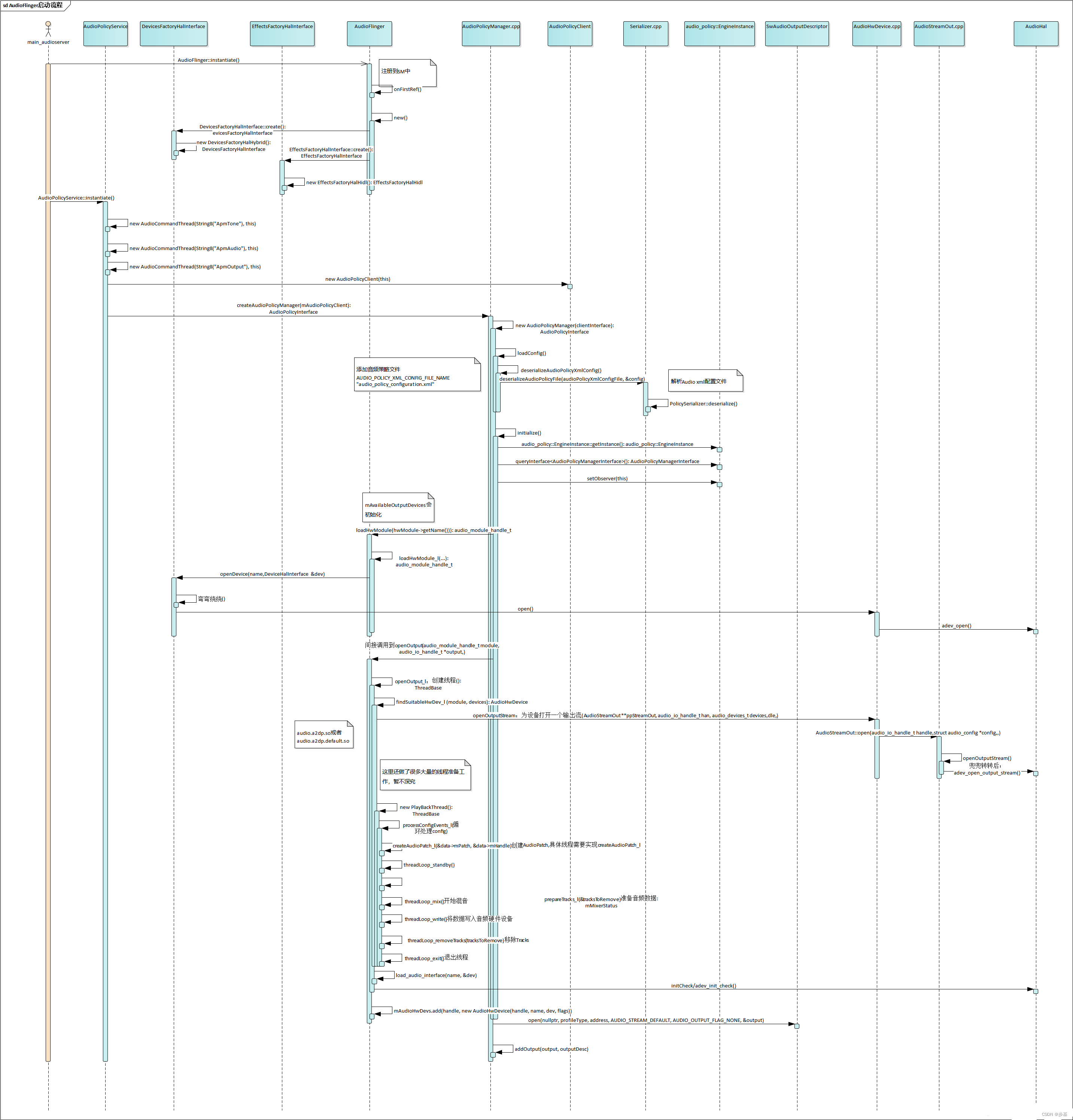
audiopolicy
Matlab smooth curve connection scatter diagram
![[digital signal denoising] improved wavelet modulus maxima digital signal denoising based on MATLAB [including Matlab source code 1710]](/img/b4/af689abb3ad4e25988f2d17152406e.jpg)
[digital signal denoising] improved wavelet modulus maxima digital signal denoising based on MATLAB [including Matlab source code 1710]
![[untitled]](/img/8c/607776e79d66acf9282dca127e12e1.jpg)
[untitled]
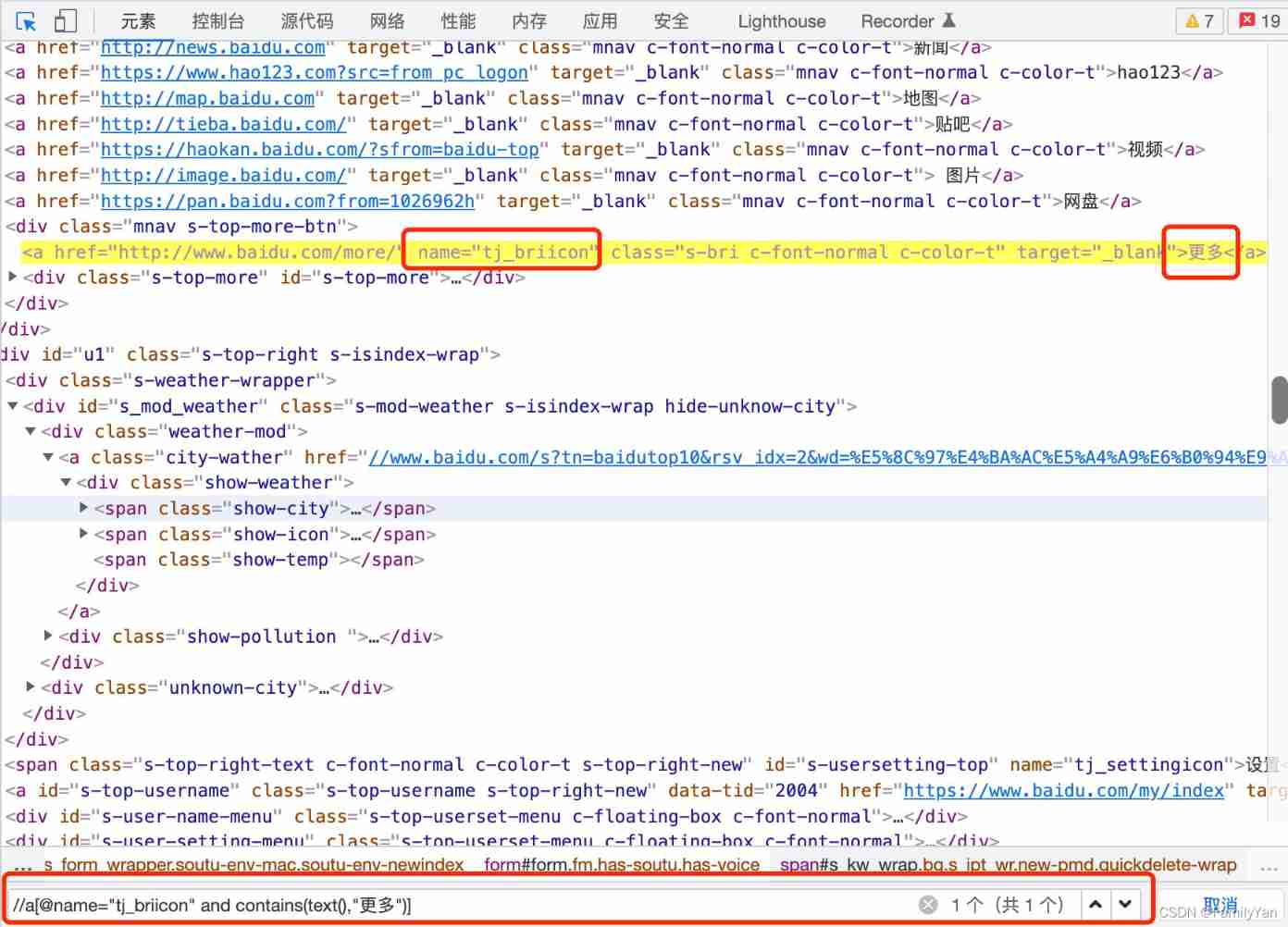
Element positioning of Web Automation
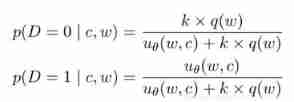
Negative sampling
随机推荐
Openresty ngx Lua regular expression
Matlab smooth curve connection scatter diagram
Leetcode buys and sells stocks
[screen recording] how to record in the OBS area
并查集实践
东南亚电商指南,卖家如何布局东南亚市场?
Simple and beautiful method of PPT color matching
终于搞懂什么是动态规划的
【Note17】PECI(Platform Environment Control Interface)
第一讲:蛇形矩阵
【Note17】PECI(Platform Environment Control Interface)
Tensor attribute statistics
Spectrum analysis of ADC sampling sequence based on stm32
一文搞定class的微觀結構和指令
[digital signal denoising] improved wavelet modulus maxima digital signal denoising based on MATLAB [including Matlab source code 1710]
513. Find the value in the lower left corner of the tree
Selenium+Pytest自动化测试框架实战
2.13 summary
openresty ngx_ Lua request response
Editor extensions in unity