当前位置:网站首页>3dslam with 16 line lidar and octomap
3dslam with 16 line lidar and octomap
2022-07-03 05:16:00 【Qianyu QY】
The lab bought a 80 Line radar , Complimentary 16 Line radar , The teacher asked me to 16 Linear radar is used on robots , Lidar can be used for target detection and SLAM, Tests found , A batch of poor target detection results , So I looked for it 3DSLAM Methods , And make a record .
This article includes the following parts :
1、 Hardware 、 The software is introduced
2、 Start lidar and get point cloud
3、 Use BLAM Get point cloud map
4、 Use octomap_server Get the octree map (octomap)
5、 Path planning and navigation
1、 Hardware 、 The software is introduced
Suteng juchuang rslidar16 Line radar 、ubuntu16.04、ros-kinetic
2、 Start lidar and get point cloud
Instructions for use will be included when purchasing lidar , Modify the configuration file and start the lidar with the following command :
roslaunch rslidar_sdk start.launch
3、 Use BLAM Get point cloud map
Reference resources :
https://www.ncnynl.com/archives/201806/2471.html
https://blog.csdn.net/xmy306538517/article/details/81122663
I recorded it in the lab first /rslidar_points Of bag, Offline created point cloud map /blam/blam_slam/octree_map.
Only in /rslidar_points When the news is released ,BLAM Will continue to publish the created point cloud map , Wait until recorded bag End of play , The point cloud map will not be published , This will be used later .
The point cloud map I generated is as follows :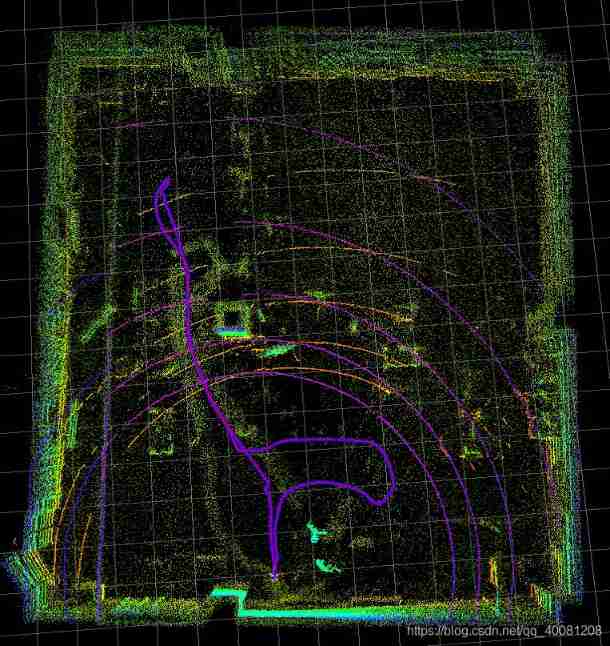
In the figure , The purple curve is the track of radar movement , Point cloud map is actually a multi frame point cloud mosaic , Similar map software splices multiple pictures into a panoramic map .
4、 Use octomap_server Get the octree map (octomap)
Reference resources :
https://blog.csdn.net/sru_alo/article/details/85083030
Be careful :
This step must be run simultaneously with the third step , Otherwise, you cannot subscribe to point cloud map .
I made octomap Here's the picture :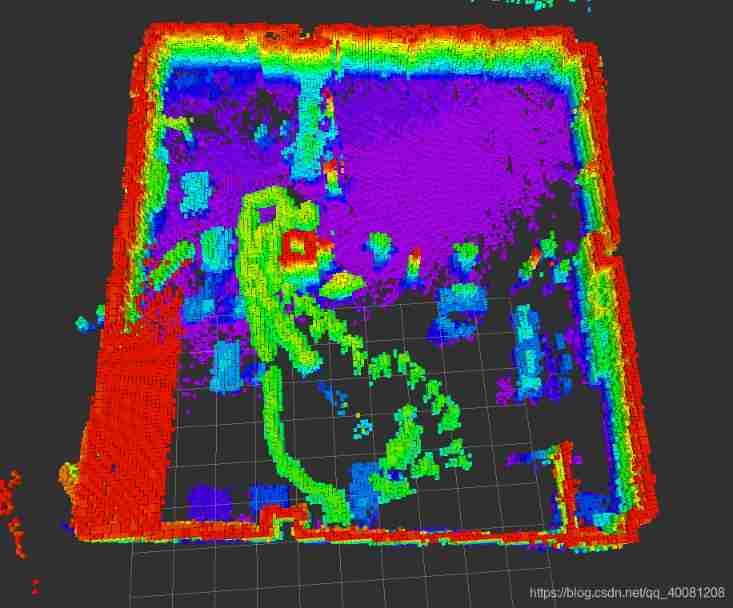
The green part in the middle of the figure is due to , When recording radar point cloud , Two people have been following the robot , Lead to more human tracks in the map , So when it's actually used , Need remote control robot to build map , People who prevent movement are also built into the picture .
Use the following command to save the compressed binary storage format octomap Map :
rosrun octomap_server octomap_saver name.bt
Save a complete probability octree map :
rosrun octomap_server octomap_saver -f name.ot
Save a 2D grid map :
rosrun map_server map_saver map:=/projected_map -f mapname
Install the octree visualizer octovis To view the map :
sudo apt-get install octovis
Restart the terminal after installation , Use the following command to display an octree map :
octovis name.ot[bt]
Here's the picture :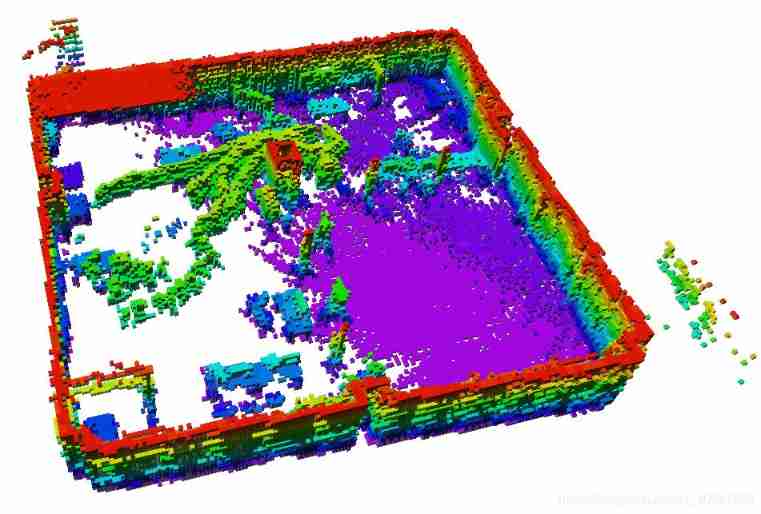
The discrete points outside are caused by the light transmission of the glass .
5、 Path planning and navigation
period , Don't do the .
边栏推荐
- Bluebridge cup real topic 2020 palindrome date simulation construction provincial competition
- Pessimistic lock and optimistic lock of multithreading
- Coordinatorlayout appbarrayout recyclerview item exposure buried point misalignment analysis
- "Hands on deep learning" pytorch edition Chapter II exercise
- [Yu Yue education] basic reference materials of interchangeability and measurement technology of Zhongyuan Institute of Technology
- 穀歌 | 蛋白序列的深度嵌入和比對
- Deep embedding and alignment of Google | protein sequences
- XML Configuration File
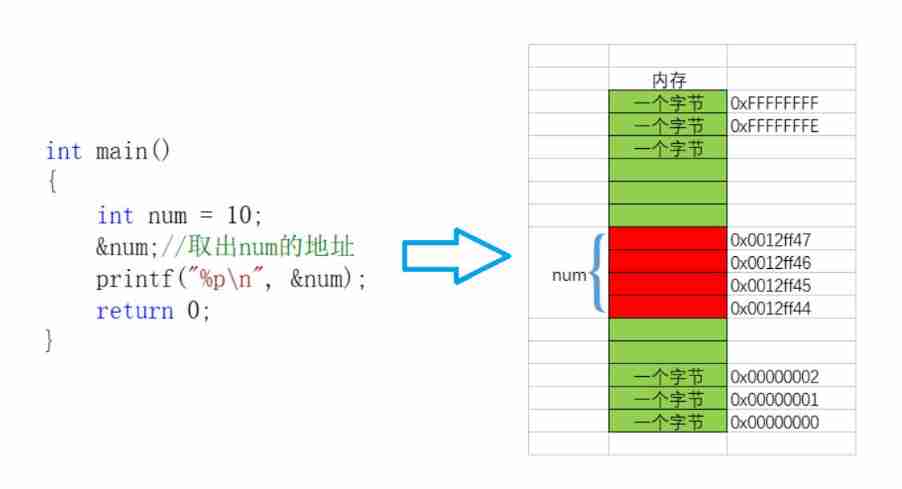
- Three representations of signed numbers: original code, inverse code and complement code
- Disassembly and installation of Lenovo r7000 graphics card
猜你喜欢

Disassembly and installation of Lenovo r7000 graphics card

【实战项目】自主web服务器

Actual combat 8051 drives 8-bit nixie tube
Appium 1.22. L'Inspecteur appium après la version X doit être installé séparément
Overview of basic knowledge of C language

Promise
联想R7000显卡的拆卸与安装
(perfect solution) how to set the position of Matplotlib legend freely

(subplots用法)matplotlib如何绘制多个子图(轴域)

"250000 a year is just the price of cabbage" has become a thing of the past. The annual salary of AI posts has decreased by 8.9%, and the latest salary report has been released
随机推荐
Principles of BTC cryptography
JQ style, element operation, effect, filtering method and transformation, event object
Gbase8s unique index and non unique index
[research materials] 2021 China's game industry brand report - Download attached
乾元通多卡聚合路由器的技术解析
[research materials] the fourth quarter report of the survey of Chinese small and micro entrepreneurs in 2021 - Download attached
Handler understands the record
最大连续子段和(动态规划,递归,递推)
112 stucked keyboard (20 points)
Online VR model display - 3D visual display solution
Shallow and first code
BIO、NIO、AIO区别
Go practice -- design patterns in golang's singleton
Introduction to redis and explanation of data types
cookie session jwt
Introduction to deep learning (II) -- univariate linear regression
[research materials] annual report of China's pension market in 2021 - Download attached
谷歌 | 蛋白序列的深度嵌入和比对
50 practical applications of R language (36) - data visualization from basic to advanced
1099 build a binary search tree (30 points)