当前位置:网站首页>GPS from getting started to giving up (XV), DCB differential code deviation
GPS from getting started to giving up (XV), DCB differential code deviation
2022-07-06 21:57:00 【Chasing wind】
One 、 Concept
DCB(Differential Code Bias Differential code deviation ) It's the global satellite navigation system (GNSS) in , From different signals Systematic deviation between observations .DCB It is caused by the hardware delay of satellite and receiver . Generally speaking, at the receiver DCB It can be solved together with the receiver clock error , Absorbed by receiver clock error ; And the satellite side DCB It must be compensated in precise positioning .
DCB There are two main types
- The deviation between different codes at the same frequency ( Such as P1-C1、P2-C2 etc. );
- The deviation between different frequencies ( Such as P1-P2);
Two 、 Data sources
at present DCB There are two main sources of data :IGS and CODE.
IGS(International GNSS Service) The organization is the most authoritative in the world GNSS One of the precision application service organizations . With GPS Modernization and BDS and Galileo Wait for the construction of navigation system ,IGS On 2011 In, multimode was established GNSS Experimental tracking network (MGEX, Multi-GNSS Experiment), For multimode GNSS Research on navigation signal monitoring and related technologies . be based on MGEX Multi system observation data , German Aerospace Center (DLR) since 2013 Since the year of IGS Organizational submissions include BDS、GPS、GLONASS And Galileo Including multiple systems DCB product . since 2015 From the year onwards , Institute of Surveying and Geophysics, Chinese Academy of Sciences, Wuhan (IGG of CAS) Become the second company in the world to IGS Submit multiple systems DCB Product organization . The data can be found in ftp://cddis.nasa.gov/gnss/products/bias/ download . European orbit determination center of Bernier University in Switzerland (CODE:Centre for Orbit Determination in Europe) Also provide DCB Product downloads , Its history is even longer . The following is its FTP Download address :ftp://ftp.aiub.unibe.ch/CODE/ .
3、 ... and 、 Application implementation
For dual band receivers , stay Ionospheric delay In, we get that the pseudorange after ionospheric correction is
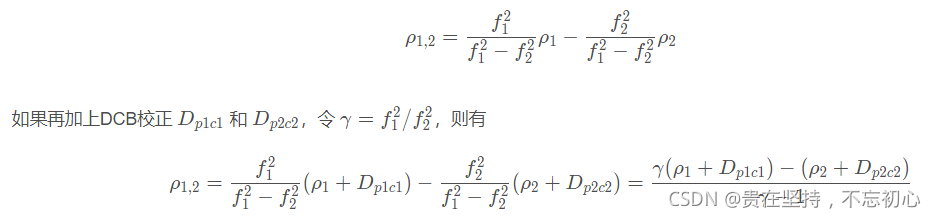
RTKLIB The single point positioning in is calculated in this way . You can refer to the following code :
gamma=SQR(lam[j])/SQR(lam[i]); /* f1^2/f2^2 */
P1=obs->P[i];
P2=obs->P[j];
P1_P2=nav->cbias[obs->sat-1][0];
P1_C1=nav->cbias[obs->sat-1][1];
P2_C2=nav->cbias[obs->sat-1][2];
/* if no P1-P2 DCB, use TGD instead */
if (P1_P2==0.0&&(sys&(SYS_GPS|SYS_GAL|SYS_QZS))) {
P1_P2=(1.0-gamma)*gettgd(obs->sat,nav);
}
if (opt->ionoopt==IONOOPT_IFLC) { /* dual-frequency */
if (P1==0.0||P2==0.0) return 0.0;
if (obs->code[i]==CODE_L1C) P1+=P1_C1; /* C1->P1 */
if (obs->code[j]==CODE_L2C) P2+=P2_C2; /* C2->P2 */
/* iono-free combination */
PC=(gamma*P1-P2)/(gamma-1.0);
}
else { /* single-frequency */
if (P1==0.0) return 0.0;
if (obs->code[i]==CODE_L1C) P1+=P1_C1; /* C1->P1 */
PC=P1-P1_P2/(1.0-gamma);
}
边栏推荐
- 一行代码可以做些什么?
- Solution to the problem of UOS boot prompt unlocking login password ring
- Quick news: the flybook players' conference is held online; Wechat payment launched "education and training service toolbox"
- Intelligent online customer service system source code Gofly development log - 2 Develop command line applications
- MySQL - transaction details
- bat脚本学习(一)
- Univariate cubic equation - relationship between root and coefficient
- Tips for web development: skillfully use ThreadLocal to avoid layer by layer value transmission
- GPS从入门到放弃(十二)、 多普勒定速
- guava:Collections. The collection created by unmodifiablexxx is not immutable
猜你喜欢
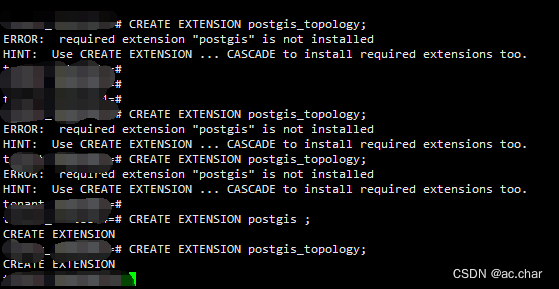
PostgreSQL install GIS plug-in create extension PostGIS_ topology
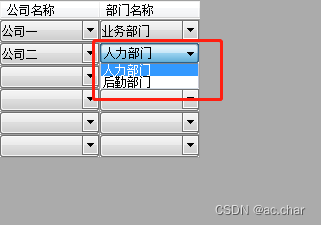
C# 如何在dataGridView里设置两个列comboboxcolumn绑定级联事件的一个二级联动效果
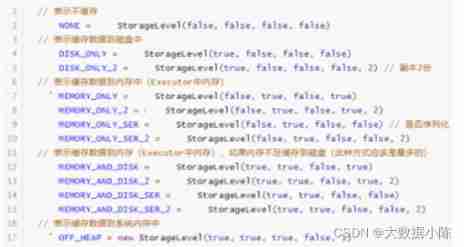
Persistence / caching of RDD in spark
GPS从入门到放弃(十五)、DCB差分码偏差
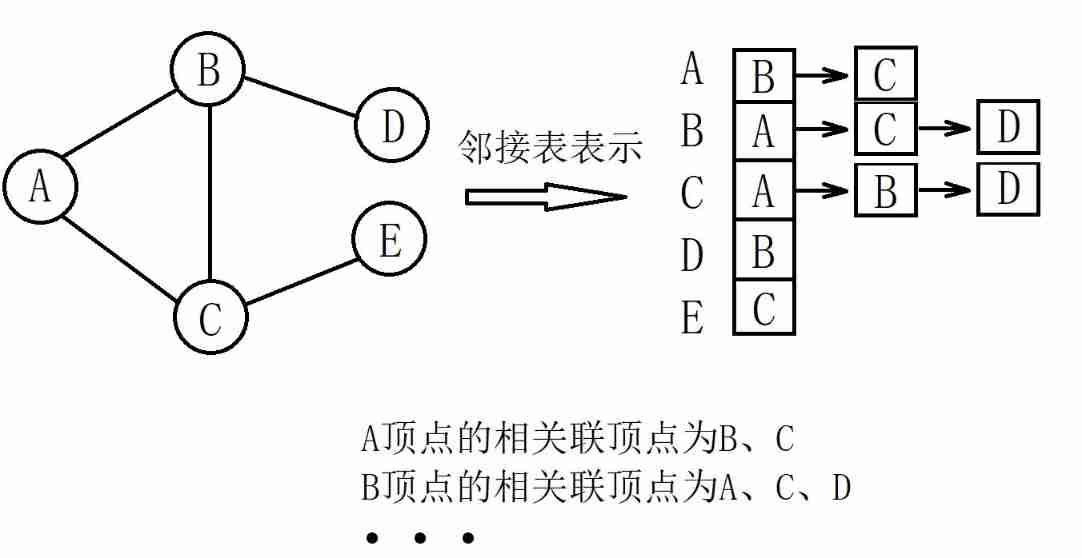
Basic introduction of figure

Sequoia China, just raised $9billion
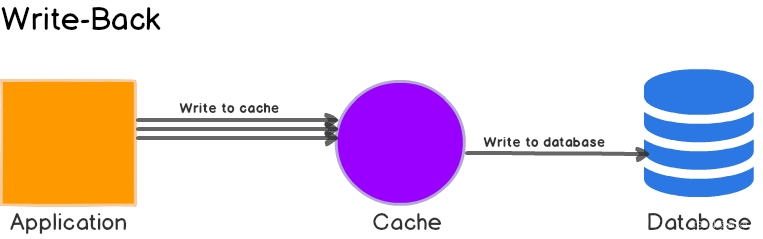
Caching strategies overview

Digital transformation takes the lead to resume production and work, and online and offline full integration rebuilds business logic

华为在多个行业同时出击,吓人的技术让欧美企业瑟瑟发抖

中国白酒的5场大战
随机推荐
C how to set two columns comboboxcolumn in DataGridView to bind a secondary linkage effect of cascading events
[Chongqing Guangdong education] Tianjin urban construction university concrete structure design principle a reference
Happy sound 2[sing.2]
50 commonly used numpy function explanations, parameters and usage examples
Enhance network security of kubernetes with cilium
Why rdd/dataset is needed in spark
HDU 2008 数字统计
麦趣尔砸了小众奶招牌
Guava: three ways to create immutablexxx objects
十一、服务介绍及端口
guava:Collections. The collection created by unmodifiablexxx is not immutable
ViT论文详解
抖音將推獨立種草App“可頌”,字節忘不掉小紅書?
强化学习-学习笔记5 | AlphaGo
Dialogue with Jia Yangqing, vice president of Alibaba: pursuing a big model is not a bad thing
uni-app App端半屏连续扫码
Basic introduction of figure
make menuconfig出现recipe for target ‘menuconfig‘ failed错误
PostgreSQL modifies the password of the database user
JPEG2000-Matlab源码实现