当前位置:网站首页>GPS从入门到放弃(十五)、DCB差分码偏差
GPS从入门到放弃(十五)、DCB差分码偏差
2022-07-06 13:46:00 【追捕的风】
一、概念
DCB(Differential Code Bias 差分码偏差)是全球卫星导航系统(GNSS)中,通过不同信号得到的观测值之间存在的系统性偏差。DCB是由卫星和接收机硬件延迟的影响造成的。一般来说接收机端的DCB可以跟接收机钟差一起解算,被接收机钟差所吸收;而卫星端的DCB在精密定位中必须得到补偿。
DCB主要有两种
- 相同频率不同码之间存在的偏差(如P1-C1、P2-C2等);
- 不同频率之间存在的偏差(如P1-P2);
二、数据来源
目前DCB数据来源主要有两个组织:IGS 和 CODE。
IGS(International GNSS Service)组织是国际最权威的GNSS精密应用服务组织之一。随着GPS的现代化以及BDS和Galileo等导航系统的建设,IGS于2011年开始建立多模GNSS实验跟踪网(MGEX, Multi-GNSS Experiment),用于多模GNSS导航信号监测及相关技术研究。基于MGEX多系统观测数据,德国宇航中心(DLR)自2013年起开始向IGS组织提交包括BDS、GPS、GLONASS及Galileo在内的多系统DCB产品。自2015年起,武汉的中国科学院测量与地球物理研究所(IGG of CAS)成为全球第二家向IGS提交多系统DCB产品的机构。这些数据可以在 ftp://cddis.nasa.gov/gnss/products/bias/ 下载。瑞士伯尼尔大学的欧洲定轨中心(CODE:Centre for Orbit Determination in Europe)也提供DCB产品下载,其历史更加悠久。下面是其FTP下载地址:ftp://ftp.aiub.unibe.ch/CODE/ 。
三、应用实现
对于双频接收机,在电离层延时中我们得到经过电离层校正后的伪距为
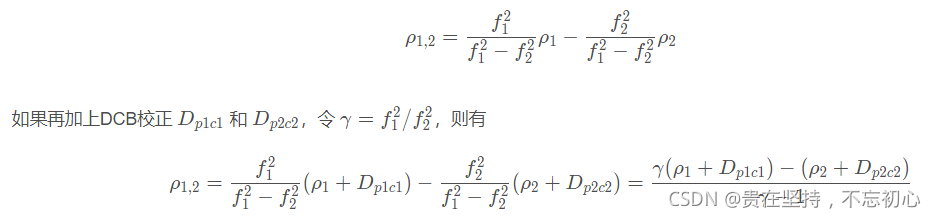
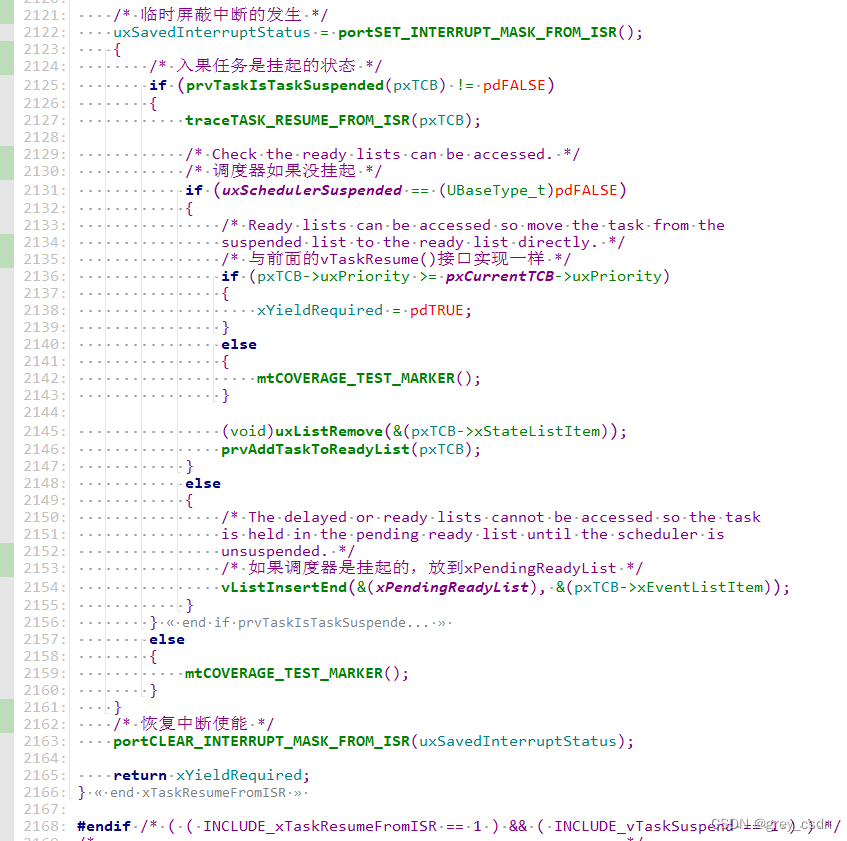
RTKLIB 中的单点定位就是用这种方式进行计算的。可以参考如下代码:
gamma=SQR(lam[j])/SQR(lam[i]); /* f1^2/f2^2 */
P1=obs->P[i];
P2=obs->P[j];
P1_P2=nav->cbias[obs->sat-1][0];
P1_C1=nav->cbias[obs->sat-1][1];
P2_C2=nav->cbias[obs->sat-1][2];
/* if no P1-P2 DCB, use TGD instead */
if (P1_P2==0.0&&(sys&(SYS_GPS|SYS_GAL|SYS_QZS))) {
P1_P2=(1.0-gamma)*gettgd(obs->sat,nav);
}
if (opt->ionoopt==IONOOPT_IFLC) { /* dual-frequency */
if (P1==0.0||P2==0.0) return 0.0;
if (obs->code[i]==CODE_L1C) P1+=P1_C1; /* C1->P1 */
if (obs->code[j]==CODE_L2C) P2+=P2_C2; /* C2->P2 */
/* iono-free combination */
PC=(gamma*P1-P2)/(gamma-1.0);
}
else { /* single-frequency */
if (P1==0.0) return 0.0;
if (obs->code[i]==CODE_L1C) P1+=P1_C1; /* C1->P1 */
PC=P1-P1_P2/(1.0-gamma);
}
边栏推荐
- The relationship between root and coefficient of quadratic equation with one variable
- PostgreSQL install GIS plug-in create extension PostGIS_ topology
- 【MySQL】Online DDL详解
- 50 commonly used numpy function explanations, parameters and usage examples
- MPLS experiment
- 20 large visual screens that are highly praised by the boss, with source code templates!
- 红杉中国,刚刚募资90亿美元
- Why is the cluster mode of spark on Yan better than the client mode
- c语言char, wchar_t, char16_t, char32_t和字符集的关系
- 设置状态栏样式Demo
猜你喜欢

![Happy sound 2[sing.2]](/img/ca/1581e561c427cb5b9bd5ae2604b993.jpg)

![关于char[]数组通过scanf赋值使用上的一些问题。。](/img/cf/d85a3172c5d29ac00377f9c30dbc4f.png)
随机推荐
Fastjson parses JSON strings (deserialized to list, map)
Sparkshuffle process and Mr shuffle process
HDU 2008 数字统计
MySQL related terms
[go][转载]vscode配置完go跑个helloworld例子
Guava: use of multiset
Efficiency tool +wps check box shows the solution to the sun problem
数字化转型挂帅复产复工,线上线下全融合重建商业逻辑
PostgreSQL 修改数据库用户的密码
OpenCV300 CMake生成project在项目过程中的问题
搜素专题(DFS )
Leetcode learning records (starting from the novice village, you can't kill out of the novice Village) ---1
基于InsightFace的高精度人脸识别,可直接对标虹软
【MySQL】Online DDL详解
[Chongqing Guangdong education] Information Literacy of Sichuan Normal University: a new engine for efficiency improvement and lifelong learning reference materials
关于程序员的职业操守,从《匠艺整洁之道》谈起
新入职一家公司需要去实践和注意的内容
MySQL - 事务(Transaction)详解
Binary tree node at the longest distance
跨分片方案 总结