当前位置:网站首页>扩展卡尔曼滤波EKF
扩展卡尔曼滤波EKF
2022-08-03 23:58:00 【威士忌燕麦拿铁】
扩展卡尔曼滤波EKF
如果将置信度和噪声限制为高斯分布,并且对运动模型和观测进行线性化,计算贝叶斯滤波中的积分(以及归一化积),即可得到扩展卡尔曼滤波(EKF)。
为了推导EKF,首先假设 x k \boldsymbol{x}_{k} xk 的置信度函数限制为高斯分布:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) = N ( x ^ k , P ^ k ) p\left(\boldsymbol{x}_{k} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k}, \boldsymbol{y}_{0: k}\right)=\mathcal{N}\left(\hat{\boldsymbol{x}}_{k}, \hat{\boldsymbol{P}}_{k}\right) p(xk∣xˇ0,v1:k,y0:k)=N(x^k,P^k)
其中, x ^ k \hat{\boldsymbol{x}}_{k} x^k 为均值, P ^ k \hat{\boldsymbol{P}}_{k} P^k 为协方差。
并且假设噪声变量 w k \boldsymbol{w}_{k} wk 和 n k \boldsymbol{n}_{k} nk 也是高斯分布的:
w k ∼ N ( 0 , Q k ) n k ∼ N ( 0 , R k ) \begin{array}{l}\boldsymbol{w}_{k} \sim \mathcal{N}\left(\mathbf{0}, \boldsymbol{Q}_{k}\right) \\\boldsymbol{n}_{k} \sim \mathcal{N}\left(\mathbf{0}, \boldsymbol{R}_{k}\right)\end{array} wk∼N(0,Qk)nk∼N(0,Rk)
对于以下运动和观测模型:
x k = f ( x k − 1 , v k , w k ) y k = g ( x k , n k ) \begin{aligned}&\boldsymbol{x}_{k}=f\left(\boldsymbol{x}_{k-1}, \boldsymbol{v}_{k},\boldsymbol{w}_{k}\right) \\&\boldsymbol{y}_{k}=g\left(\boldsymbol{x}_{k}, \boldsymbol{n}_{k}\right)\end{aligned} xk=f(xk−1,vk,wk)yk=g(xk,nk)
由于 f ( ⋅ ) \boldsymbol{f}(\cdot) f(⋅) 和 g ( ⋅ ) \boldsymbol{g}(\cdot) g(⋅) 是非线性函数,所以我们需要对其进行线性化。在当前状态的均值处展开,对运动和观测模型进行线性化:
f ( x k − 1 , v k , w k ) ≈ x ˇ k + F k − 1 ( x k − 1 − x ^ k − 1 ) + w k ′ \boldsymbol{f}\left(\boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}, \boldsymbol{w}_{k}\right) \approx \check{\boldsymbol{x}}_{k}+\boldsymbol{F}_{k-1}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right)+\boldsymbol{w}_{k}^{\prime} f(xk−1,vk,wk)≈xˇk+Fk−1(xk−1−x^k−1)+wk′
g ( x k , n k ) ≈ y ˇ k + G k ( x k − x ˇ k ) + n k ′ \boldsymbol{g}\left(\boldsymbol{x}_{k}, \boldsymbol{n}_{k}\right) \approx \check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right)+\boldsymbol{n}_{k}^{\prime} g(xk,nk)≈yˇk+Gk(xk−xˇk)+nk′
其中:
- x ˇ k = f ( x ^ k − 1 , v k , 0 ) \check{\boldsymbol{x}}_{k}=\boldsymbol{f}\left(\hat{\boldsymbol{x}}_{k-1}, \boldsymbol{v}_{k}, \mathbf{0}\right) xˇk=f(x^k−1,vk,0)
- F k − 1 = ∂ f ( x k − 1 , v k , w k ) ∂ x k − 1 ∣ x ^ k − 1 , v k , 0 \boldsymbol{F}_{k-1}=\left.\frac{\partial \boldsymbol{f}\left(\boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}, \boldsymbol{w}_{k}\right)}{\partial \boldsymbol{x}_{k-1}}\right|_{\hat{\boldsymbol{x}}_{k-1}, \boldsymbol{v}_{k}, \mathbf{0}} Fk−1=∂xk−1∂f(xk−1,vk,wk)∣∣x^k−1,vk,0
- w k ′ = ∂ f ( x k − 1 , v k , w k ) ∂ w k ∣ x ^ k − 1 , v k , 0 w k \boldsymbol{w}_{k}^{\prime}=\left.\frac{\partial \boldsymbol{f}\left(\boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}, \boldsymbol{w}_{k}\right)}{\partial \boldsymbol{w}_{k}}\right|_{\hat{\boldsymbol{x}}_{k-1}, \boldsymbol{v}_{k}, \mathbf{0}} \boldsymbol{w}_{k} wk′=∂wk∂f(xk−1,vk,wk)∣∣x^k−1,vk,0wk
- y ˇ k = g ( x ˇ k , 0 ) \check{\boldsymbol{y}}_{k}=\boldsymbol{g}\left(\check{\boldsymbol{x}}_{k}, \mathbf{0}\right) yˇk=g(xˇk,0)
- G k = ∂ g ( x k , n k ) ∂ x k ∣ x ˇ k , 0 \boldsymbol{G}_{k}=\left.\frac{\partial \boldsymbol{g}\left(\boldsymbol{x}_{k}, \boldsymbol{n}_{k}\right)}{\partial \boldsymbol{x}_{k}}\right|_{\check{\boldsymbol{x}}_{k}, \mathbf{0}} Gk=∂xk∂g(xk,nk)∣∣xˇk,0
- n k ′ = ∂ g ( x k , n k ) ∂ n k ∣ x ˇ k , 0 n k \boldsymbol{n}_{k}^{\prime}=\left.\frac{\partial \boldsymbol{g}\left(\boldsymbol{x}_{k}, \boldsymbol{n}_{k}\right)}{\partial \boldsymbol{n}_{k}}\right|_{\check{\boldsymbol{x}}_{k}, \mathbf{0}} \boldsymbol{n}_{k} nk′=∂nk∂g(xk,nk)∣∣xˇk,0nk
给定过去的状态和最新输入,则当前状态 x k \boldsymbol{x}_{k} xk 的统计学特性为:
x k ≈ x ˇ k + F k − 1 ( x k − 1 − x ^ k − 1 ) + w k ′ \boldsymbol{x}_{k} \approx \check{\boldsymbol{x}}_{k}+\boldsymbol{F}_{k-1}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right)+\boldsymbol{w}_{k}^{\prime} xk≈xˇk+Fk−1(xk−1−x^k−1)+wk′
E [ x k ] ≈ x ˇ k + F k − 1 ( x k − 1 − x ^ k − 1 ) + E [ w k ′ ] ⏟ 0 E\left[\boldsymbol{x}_{k}\right] \approx \check{\boldsymbol{x}}_{k}+\boldsymbol{F}_{k-1}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right)+\underbrace{E\left[\boldsymbol{w}_{k}^{\prime}\right]}_{0} E[xk]≈xˇk+Fk−1(xk−1−x^k−1)+0E[wk′]
E [ ( x k − E [ x k ] ) ( x k − E [ x k ] ) T ] ≈ E [ w k ′ w k ′ T ] ⏟ Q k ′ E\left[\left(\boldsymbol{x}_{k}-E\left[\boldsymbol{x}_{k}\right]\right)\left(\boldsymbol{x}_{k}-E\left[\boldsymbol{x}_{k}\right]\right)^{\mathrm{T}}\right] \approx \underbrace{E\left[\boldsymbol{w}_{k}^{\prime} \boldsymbol{w}_{k}^{\left.\prime^{\mathrm{T}}\right]}\right.}_{\boldsymbol{Q}_{k}^{\prime}} E[(xk−E[xk])(xk−E[xk])T]≈Qk′E[wk′wk′T]
p ( x k ∣ x k − 1 , v k ) ≈ N ( x ˇ k + F k − 1 ( x k − 1 − x ^ k − 1 ) , Q k ′ ) p\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}\right) \approx \mathcal{N}\left(\check{\boldsymbol{x}}_{k}+\boldsymbol{F}_{k-1}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right), \boldsymbol{Q}_{k}^{\prime}\right) p(xk∣xk−1,vk)≈N(xˇk+Fk−1(xk−1−x^k−1),Qk′)
给定当前状态,则当前观测 y ˇ k \check{\boldsymbol{y}}_{k} yˇk 的统计学特性为:
y k ≈ y ˇ k + G k ( x k − x ˇ k ) + n k ′ \boldsymbol{y}_{k} \approx \check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right)+\boldsymbol{n}_{k}^{\prime} yk≈yˇk+Gk(xk−xˇk)+nk′
E [ y k ] ≈ y ˇ k + G k ( x k − x ˇ k ) + E [ n k ′ ] ⏟ 0 E\left[\boldsymbol{y}_{k}\right] \approx \check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right)+\underbrace{E\left[\boldsymbol{n}_{k}^{\prime}\right]}_{0} E[yk]≈yˇk+Gk(xk−xˇk)+0E[nk′]
E [ ( y k − E [ y k ] ) ( y k − E [ y k ] ) T ] ≈ E [ n k ′ n k ′ T ] ⏟ R k ′ E\left[\left(\boldsymbol{y}_{k}-E\left[\boldsymbol{y}_{k}\right]\right)\left(\boldsymbol{y}_{k}-E\left[\boldsymbol{y}_{k}\right]\right)^{\mathrm{T}}\right] \approx \underbrace{E\left[\boldsymbol{n}_{k}^{\prime} \boldsymbol{n}_{k}^{\prime \mathrm{T}}\right]}_{\boldsymbol{R}_{k}^{\prime}} E[(yk−E[yk])(yk−E[yk])T]≈Rk′E[nk′nk′T]
p ( y k ∣ x k ) ≈ N ( y ˇ k + G k ( x k − x ˇ k ) , R k ′ ) p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}\right) \approx \mathcal{N}\left(\check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right), \boldsymbol{R}_{k}^{\prime}\right) p(yk∣xk)≈N(yˇk+Gk(xk−xˇk),Rk′)
由贝叶斯滤波器有:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) ⏟ 后验置信度 = η p ( y k ∣ x k ) ⏟ 利用 g ( ⋅ ) 进行更新 ∫ p ( x k ∣ x k − 1 , v k ) ⏟ 利用 f ( ⋅ ) 进行预测 p ( x k − 1 ∣ x ˇ 0 , v 1 : k − 1 , y 0 : k − 1 ) ⏟ 先验置信度 d x k − 1 \begin{aligned}& \underbrace{p\left(\boldsymbol{x}_{k} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k}, \boldsymbol{y}_{0: k}\right)}_{\text {后验置信度 }} \\=& \eta \underbrace{p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}\right)}_{\text {利用 } \boldsymbol{g}(\cdot) \text { 进行更新 }} \int \underbrace{p\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}\right)}_{\text {利用 } \boldsymbol{f}(\cdot) \text { 进行预测 }} \underbrace{p\left(\boldsymbol{x}_{k-1} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k-1}, \boldsymbol{y}_{0: k-1}\right)}_{\text {先验置信度 }} \mathrm{d} \boldsymbol{x}_{k-1}\end{aligned} =后验置信度 p(xk∣xˇ0,v1:k,y0:k)η利用 g(⋅) 进行更新 p(yk∣xk)∫利用 f(⋅) 进行预测 p(xk∣xk−1,vk)先验置信度 p(xk−1∣xˇ0,v1:k−1,y0:k−1)dxk−1
将线性化之后的运动和观测模型代入到贝叶斯滤波器中,有:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) ⏟ N ( x ^ k , P ^ k ) = η p ( y k ∣ x k ) ⏟ N ( y ˇ k + G k ( x k − x ˇ k ) , R k ′ ) × ∫ p ( x k ∣ x k − 1 , v k ) ⏟ N ( x ˇ k + F k − 1 ( x k − 1 − x ^ k − 1 ) , Q k ′ ) p ( x k − 1 ∣ x ˇ 0 , v 1 : k − 1 , y 0 : k − 1 ) ⏟ N ( x ^ k − 1 , P ^ k − 1 ) d x k − 1 \begin{array}{l}\underbrace{p\left(\boldsymbol{x}_{k} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k}, \boldsymbol{y}_{0: k}\right)}_{\mathcal{N}\left(\hat{\boldsymbol{x}}_{k}, \hat{\boldsymbol{P}}_{k}\right)}=\eta \underbrace{p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}\right)}_{\mathcal{N}\left(\check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right), \boldsymbol{R}_{k}^{\prime}\right)}\\\times \int \underbrace{p\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}\right)}_{\mathcal{N}\left(\check{\boldsymbol{x}}_{k}+\boldsymbol{F}_{k-1}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right), \boldsymbol{Q}_{k}^{\prime}\right)} \underbrace{p\left(\boldsymbol{x}_{k-1} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k-1}, \boldsymbol{y}_{0: k-1}\right)}_{\mathcal{N}\left(\hat{\boldsymbol{x}}_{k-1}, \hat{\boldsymbol{P}}_{k-1}\right)} \mathrm{d} \boldsymbol{x}_{k-1}\end{array} N(x^k,P^k)p(xk∣xˇ0,v1:k,y0:k)=ηN(yˇk+Gk(xk−xˇk),Rk′)p(yk∣xk)×∫N(xˇk+Fk−1(xk−1−x^k−1),Qk′)p(xk∣xk−1,vk)N(x^k−1,P^k−1)p(xk−1∣xˇ0,v1:k−1,y0:k−1)dxk−1
将服从高斯分布的变量传入到非线性函数中,积分之后仍然服从高斯分布:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) ⏟ N ( x ^ k , P ^ k ) = η p ( y k ∣ x k ) ⏟ N ( y ˇ k + G k ( x k − x ˇ k ) , R k ′ ) × ∫ p ( x k ∣ x k − 1 , v k ) p ( x k − 1 ∣ x ˇ 0 , v 1 : k − 1 , y 0 : k − 1 ) d x k − 1 ⏟ N ( x ˇ k , F k − 1 P ^ k − 1 F k − 1 T + Q k ′ ) \begin{array}{l}\underbrace{p\left(\boldsymbol{x}_{k} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k}, \boldsymbol{y}_{0: k}\right)}_{\mathcal{N}\left(\hat{\boldsymbol{x}}_{k}, \hat{\boldsymbol{P}}_{k}\right)}=\eta \underbrace{p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}\right)}_{\mathcal{N}\left(\check{\boldsymbol{y}}_{k}+\boldsymbol{G}_{k}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right), \boldsymbol{R}_{k}^{\prime}\right)} \\\times \underbrace{\int p\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}\right) p\left(\boldsymbol{x}_{k-1} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k-1}, \boldsymbol{y}_{0: k-1}\right) \mathrm{d} \boldsymbol{x}_{k-1}}_{\mathcal{N}\left(\check{\boldsymbol{x}}_{k}, \boldsymbol{F}_{k-1} \hat{\boldsymbol{P}}_{k-1} \boldsymbol{F}_{k-1}^{\mathrm{T}}+\boldsymbol{Q}_{k}^{\prime}\right)}\end{array} N(x^k,P^k)p(xk∣xˇ0,v1:k,y0:k)=ηN(yˇk+Gk(xk−xˇk),Rk′)p(yk∣xk)×N(xˇk,Fk−1P^k−1Fk−1T+Qk′)∫p(xk∣xk−1,vk)p(xk−1∣xˇ0,v1:k−1,y0:k−1)dxk−1
再利用高斯概率密度函数的归一化积的性质,有:
p ( x k ∣ x ˇ 0 , v 1 : k , y 0 : k ) ⏟ N ( x ^ k , P ^ k ) = η p ( y k ∣ x k ) ∫ p ( x k ∣ x k − 1 , v k ) p ( x k − 1 ∣ x ˇ 0 , v 1 : k − 1 , y 0 : k − 1 ) d x k − 1 ⏟ N ( x ˇ k + K k ( y k − y ˇ k ) , ( 1 − K k G k ) ( F k − 1 P ^ k − 1 F k − 1 T + Q k ′ ) ) \begin{aligned}\underbrace{p\left(\boldsymbol{x}_{k} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k}, \boldsymbol{y}_{0: k}\right)}_{\mathcal{N}\left(\hat{\boldsymbol{x}}_{k}, \hat{\boldsymbol{P}}_{k}\right)} =& \underbrace{\eta p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}\right) \int p\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{k-1}, \boldsymbol{v}_{k}\right) p\left(\boldsymbol{x}_{k-1} \mid \check{\boldsymbol{x}}_{0}, \boldsymbol{v}_{1: k-1}, \boldsymbol{y}_{0: k-1}\right) \mathrm{d} \boldsymbol{x}_{k-1}}_{\mathcal{N}\left(\check{\boldsymbol{x}}_{k}+\boldsymbol{K}_{k}\left(\boldsymbol{y}_{k}-\check{\boldsymbol{y}}_{k}\right),\left(\mathbf{1}-\boldsymbol{K}_{k} \boldsymbol{G}_{k}\right)\left(\boldsymbol{F}_{k-1} \hat{\boldsymbol{P}}_{k-1} \boldsymbol{F}_{k-1}^{\mathrm{T}}+\boldsymbol{Q}_{k}^{\prime}\right)\right)}\end{aligned} N(x^k,P^k)p(xk∣xˇ0,v1:k,y0:k)=N(xˇk+Kk(yk−yˇk),(1−KkGk)(Fk−1P^k−1Fk−1T+Qk′))ηp(yk∣xk)∫p(xk∣xk−1,vk)p(xk−1∣xˇ0,v1:k−1,y0:k−1)dxk−1
其中, K k \boldsymbol{K}_{k} Kk 为卡尔曼增益。比较上面式子的左右两侧,有:
预测
x ˇ k = f ( x ^ k − 1 , v k , 0 ) \check{\boldsymbol{x}}_{k} =\boldsymbol{f}\left(\hat{\boldsymbol{x}}_{k-1}, \boldsymbol{v}_{k}, \mathbf{0}\right) xˇk=f(x^k−1,vk,0)
P ˇ k = F k − 1 P ^ k − 1 F k − 1 T + Q k ′ \check{\boldsymbol{P}}_{k} =\boldsymbol{F}_{k-1} \hat{\boldsymbol{P}}_{k-1} \boldsymbol{F}_{k-1}^{\mathrm{T}}+\boldsymbol{Q}_{k}^{\prime} Pˇk=Fk−1P^k−1Fk−1T+Qk′
卡尔曼增益
K k = P ˇ k G k T ( G k P ˇ k G k T + R k ′ ) − 1 \boldsymbol{K}_{k} =\check{\boldsymbol{P}}_{k} \boldsymbol{G}_{k}^{\mathrm{T}}\left(\boldsymbol{G}_{k} \check{\boldsymbol{P}}_{k} \boldsymbol{G}_{k}^{\mathrm{T}}+\boldsymbol{R}_{k}^{\prime}\right)^{-1} Kk=PˇkGkT(GkPˇkGkT+Rk′)−1
更新
x ^ k = x ˇ k + K k ( y k − g ( x ˇ k , 0 ) ) ⏟ 更新量 \hat{\boldsymbol{x}}_{k} =\check{\boldsymbol{x}}_{k}+\boldsymbol{K}_{k} \underbrace{\left(\boldsymbol{y}_{k}-\boldsymbol{g}\left(\check{\boldsymbol{x}}_{k}, \mathbf{0}\right)\right)}_{\text {更新量 }} x^k=xˇk+Kk更新量 (yk−g(xˇk,0))
P ^ k = ( 1 − K k G k ) P ˇ k \hat{\boldsymbol{P}}_{k} =\left(\mathbf{1}-\boldsymbol{K}_{k} \boldsymbol{G}_{k}\right) \check{\boldsymbol{P}}_{k} P^k=(1−KkGk)Pˇk
边栏推荐
- Pytest学习-skip/skipif
- win10+cuda11.7+pytorch1.12.0 installation
- Talking about the future development direction of my country's industrial parks
- [Miscellaneous] How to install the specified font into the computer and then use the font in the Office software?
- JS get parameter value of URL hyperlink
- 苹果对高通说:我4.45亿美元买下一个新园区,可能计划加快基带芯片自研
- 搭建好pytorch环境后,pip和conda指令不能用
- 用队列模拟实现栈
- BPF 可移植性和 CO-RE(一次编译,到处运行)
- 1067 Sort with Swap(0, i)
猜你喜欢
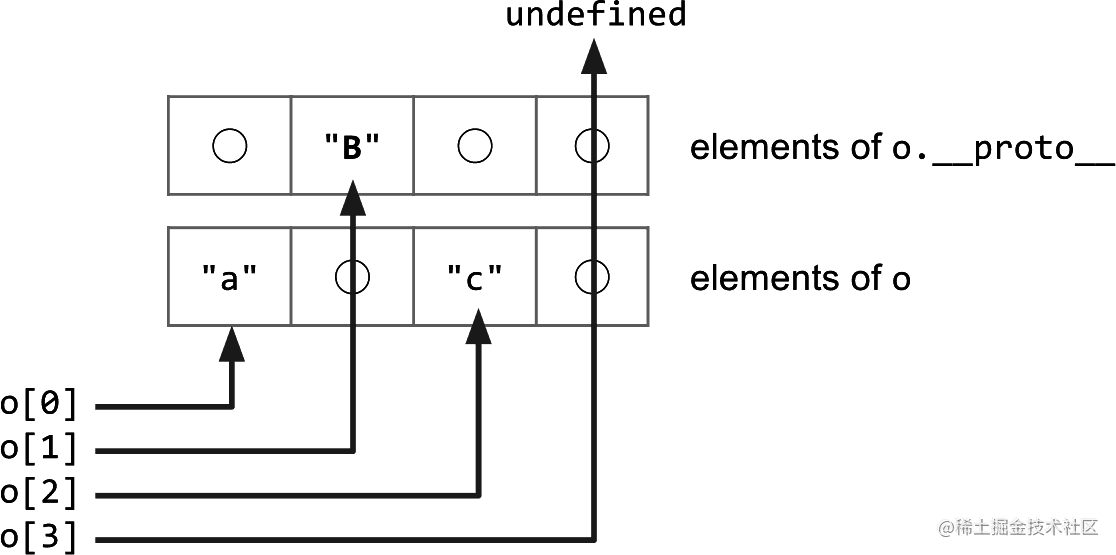
In V8 how arrays (with source code, picture and text easier to understand)

jav一键生成数据库文档

The "interaction design" battle of the smart cockpit

响应式织梦模板除尘器类网站
![2022-08-03:以下go语言代码输出什么?A:2;B:3;C:1;D:0。 package main import “fmt“ func main() { slice := []i](/img/a9/6de3c2bae92d09b13b1c36e01f86c2.png)
2022-08-03:以下go语言代码输出什么?A:2;B:3;C:1;D:0。 package main import “fmt“ func main() { slice := []i
Apple told Qualcomm: I bought a new campus for $445 million and may plan to speed up self-development of baseband chips
RSS feeds WeChat public - feed43 asain

用两个栈模拟队列
Shell编程之循环语句与函数

伦敦银最新均线分析系统怎么操作?
随机推荐
Creo 9.0二维草图的诊断:加亮开放端点
汉字风格迁移---结合本地和全局特征学习的中文字体迁移
重新认识浏览器的渲染过程
(PC+WAP)织梦模板螺钉手柄类网站
密码学基础以及完整加密通讯过程解析
BPF 可移植性和 CO-RE(一次编译,到处运行)
[Miscellaneous] How to install the specified font into the computer and then use the font in the Office software?
Using matlab to solve the linear optimization problem based on matlab dynamic model of learning notes _11 】 【
用栈实现队列
FinClip, help smart TV more imagination
SolidEdge ST8安装教程
Flutter教程之为什么 Flutter 是创业的最佳选择?
Nanoprobes丨Nanogold-抗体和链霉亲和素偶联物
V8中的快慢数组(附源码、图文更易理解)
浅谈我国产业园区未来的发展方向
2022-08-03: What does the following go code output?A: 2; B: 3; C: 1; D: 0.package main import "fmt" func main() { slice := []i
Creo9.0 绘制中心线
用两个栈模拟队列
图论-虚拟节点分层建图
【LeetCode】最长公共子序列(动态规划)