当前位置:网站首页>【SLAM】DM-VIO(ros版)安装和论文解读
【SLAM】DM-VIO(ros版)安装和论文解读
2022-08-02 19:55:00 【iwander。】
1. dm-vio的安装
进入官方链接 ,基本上就是按照readme的操作来:
下载代码:
git clone https://github.com/lukasvst/dm-vio.git安装gtsam:
sudo apt install libtbb-dev
git clone https://github.com/borglab/gtsam.git
cd gtsam
git checkout 4.2a6 # not strictly necessary but this is the version tested with.
mkdir build && cd build
cmake -DGTSAM_POSE3_EXPMAP=ON -DGTSAM_ROT3_EXPMAP=ON -DGTSAM_USE_SYSTEM_EIGEN=ON -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF ..
make -j
sudo make install安装opencv:
sudo apt-get install libopencv-dev安装pangolin:
sudo apt install libgl1-mesa-dev libglew-dev pkg-config libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git checkout v0.6
mkdir build
cd build
cmake ..
cmake --build .
sudo make install这里要注意,如果电脑里没有pangolin,是可以编译的,但是不会生成可执行文件,所以这个仍然是必须安装的库,此外,必须是0.6版本。
git checkout v0.6编译之前,进入到CMakeLists.txt, 19行增加regex:
find_package(Boost COMPONENTS system thread filesystem chrono serialization date_time timer regex)编译:
cd dm-vio
mkdir build
cd build
cmake ..
make -j编译完成后,在build/bin目录下,就能看到可执行文件dmvio_dataset。接下来,就可以按照官方的方法跑数据了。
2. dm-vio-ros的安装
接下来是ros插件的安装,由于市面上的代码和数据都是ros版的,使用起来比较方便。随便进入一个目录,推荐是刚刚安装的dm-vio的一个子目录下:
git clone https://github.com/lukasvst/dm-vio-ros.git为了能让这个插件找到刚刚编译的dm-vio,所以一个偷懒的办法,就是在.bashrc加上一个环境变量:
sudo gedit ~/.bashrc在最后面,加上:
export DMVIO_BUILD=/YOURPATH/TO/dm-vio/buildcatkin_make之前,仍然需要修改CMakeLists.txt,85行之后,增加一句:
add_dependencies(${PROJECT_NAME}_node ${PROJECT_NAME}_generate_messages_cpp)不然编译的时候会因为找不到生成的msg格式而报错,最后就是:
catkin_make
source devel/setup.bash尝试euroc数据集:
首先要在config里加上euroc的相机模型:
echo -e "458.654 457.296 367.215 248.375 -0.28340811 0.07395907 0.00019359 1.76187114e-05\n752 480\ncrop\n640 480\n" > camera.txt就可以跑了:
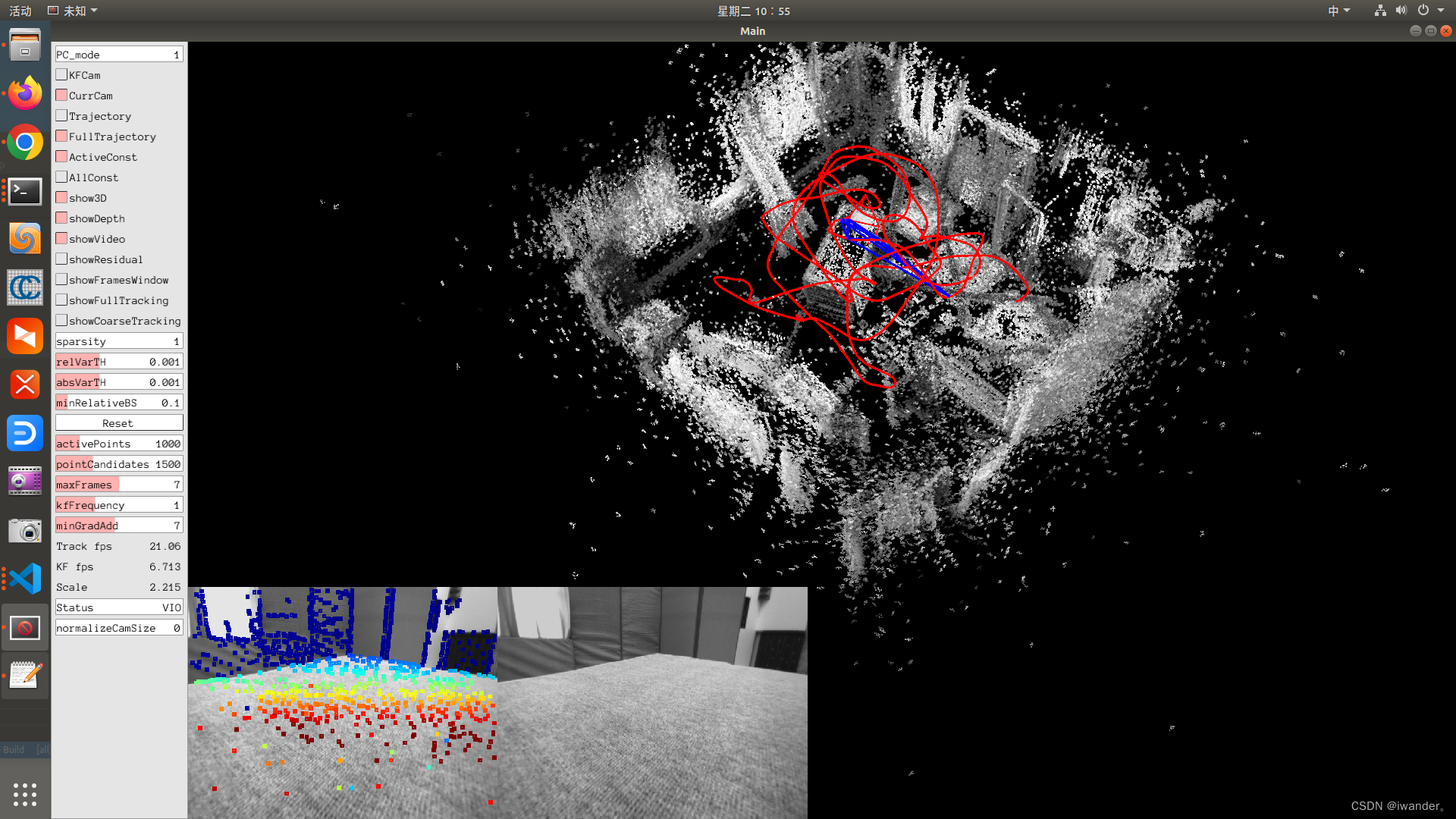
rosrun dmvio_ros node calib=/PATH/TO/camera.txt settingsFile=/PATH/TO/dm-vio/configs/euroc.yaml mode=1 nogui=0 preset=1 useimu=1 quiet=1 init_requestFullResetNormalizedErrorThreshold=0.8 init_pgba_skipFirstKFs=1
rosbag play V2_01_easy.bag效果如下,直接法的VIO效果真炫!
3. 论文
论文地址:https://arxiv.org/pdf/2201.04114.pdf
TODO,待续
边栏推荐
猜你喜欢

【Psychology · Characters】Issue 1
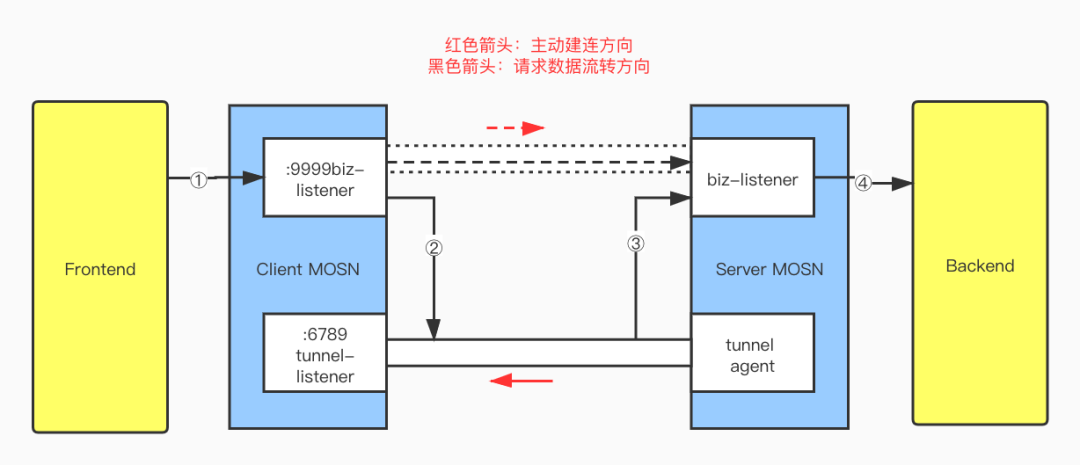
MOSN 反向通道详解

扫码预约 | 观看Apache Linkis数据处理实践以及计算治理能力
The time series database has been developed for 5 years. What problem does it need to solve?
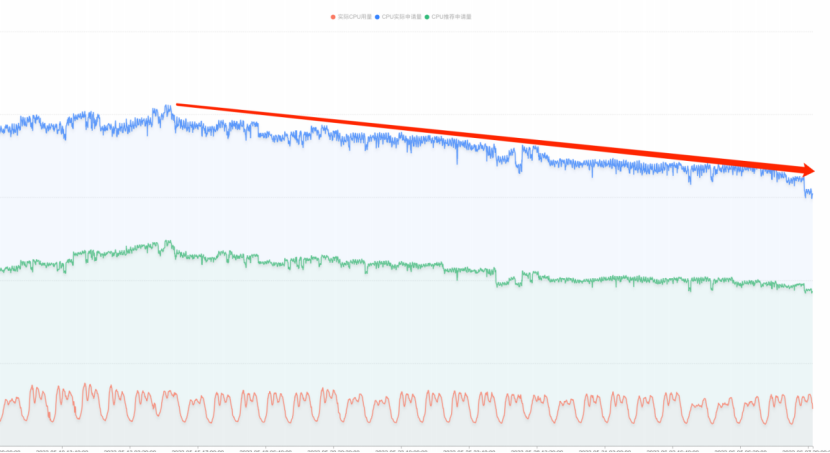
腾讯云孟凡杰:我所经历的云原生降本增效最佳实践案例
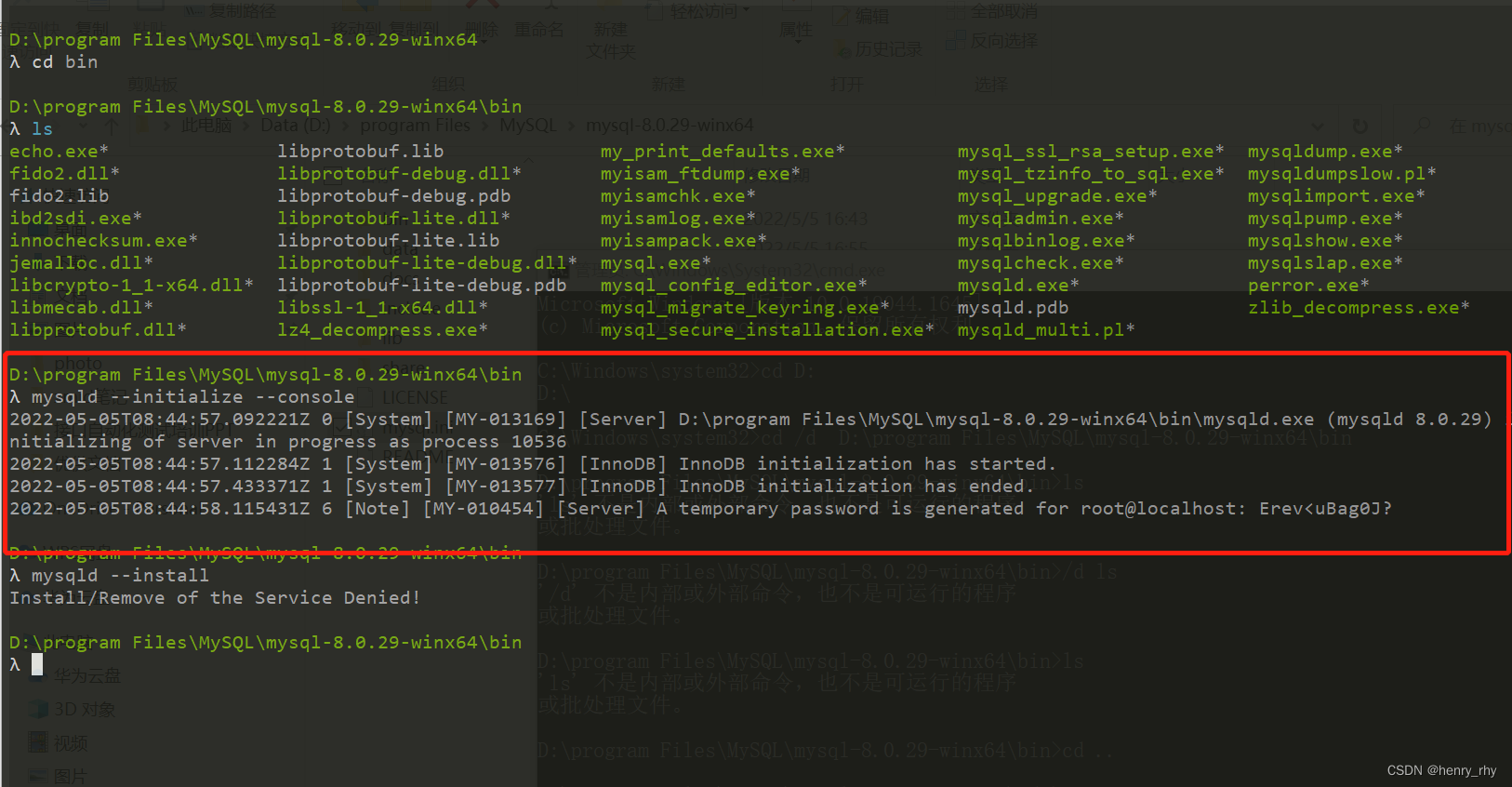
SQL 入门之第一讲——MySQL 8.0.29安装教程(windows 64位)

You want the metagenomics - microbiome knowledge in all the (2022.8)
Redis 5 种数据结构及对应使用场景

es 读流程源码解析

Translate My Wonderful | July Moli Translation Program Winners Announced

随机推荐
golang源码分析之geoip2-golang
二丙二醇甲醚醋酸酯
ShardingSphere-proxy +PostgreSQL实现读写分离(静态策略)
Likou Question of the Day - Day 46 - 344. Reverse Strings
模板的进阶
成为黑客不得不学的语言,看完觉得你们还可吗?
分布式事务
技术分享 | Apache Linkis 快速集成网页IDE工具 Scriptis
es 读流程源码解析
Silver circ: letter with material life insurance products should be by the insurance company is responsible for the management
实现fashion_minst服装图像分类
shell:条件语句
J9数字论:互联网跨链桥有什么作用呢?
SCANIA SCANIA OTL tag is introduced
牛客题目——滑动窗口的最大值、矩阵最长递增路径、顺时针旋转矩阵、接雨水问题
美国爱荷华州立大学| Improving Distantly Supervised Relation Extraction by Natural Language Inference(通过自然语言推理改进远程监督关系提取)
ImageNet下载及处理
MySQL安装配置教程(超级详细)
Leetcode刷题——23. 合并K个升序链表
Translate My Wonderful | July Moli Translation Program Winners Announced