当前位置:网站首页>How to obtain the coordinates of the aircraft passing through both ends of the radar
How to obtain the coordinates of the aircraft passing through both ends of the radar
2022-06-28 19:44:00 【weixin_ forty-five million four hundred and eighty-six thousand】
First, let's talk about the general implementation steps :
- Create a radar scanned entity and define the route of the aircraft ;
- Use the interface of intervisibility analysis to find the position coordinates of the aircraft entering and exiting the radar detection range ;
- Use coordinates to build line entities , The radar range is red , Green outside the range .
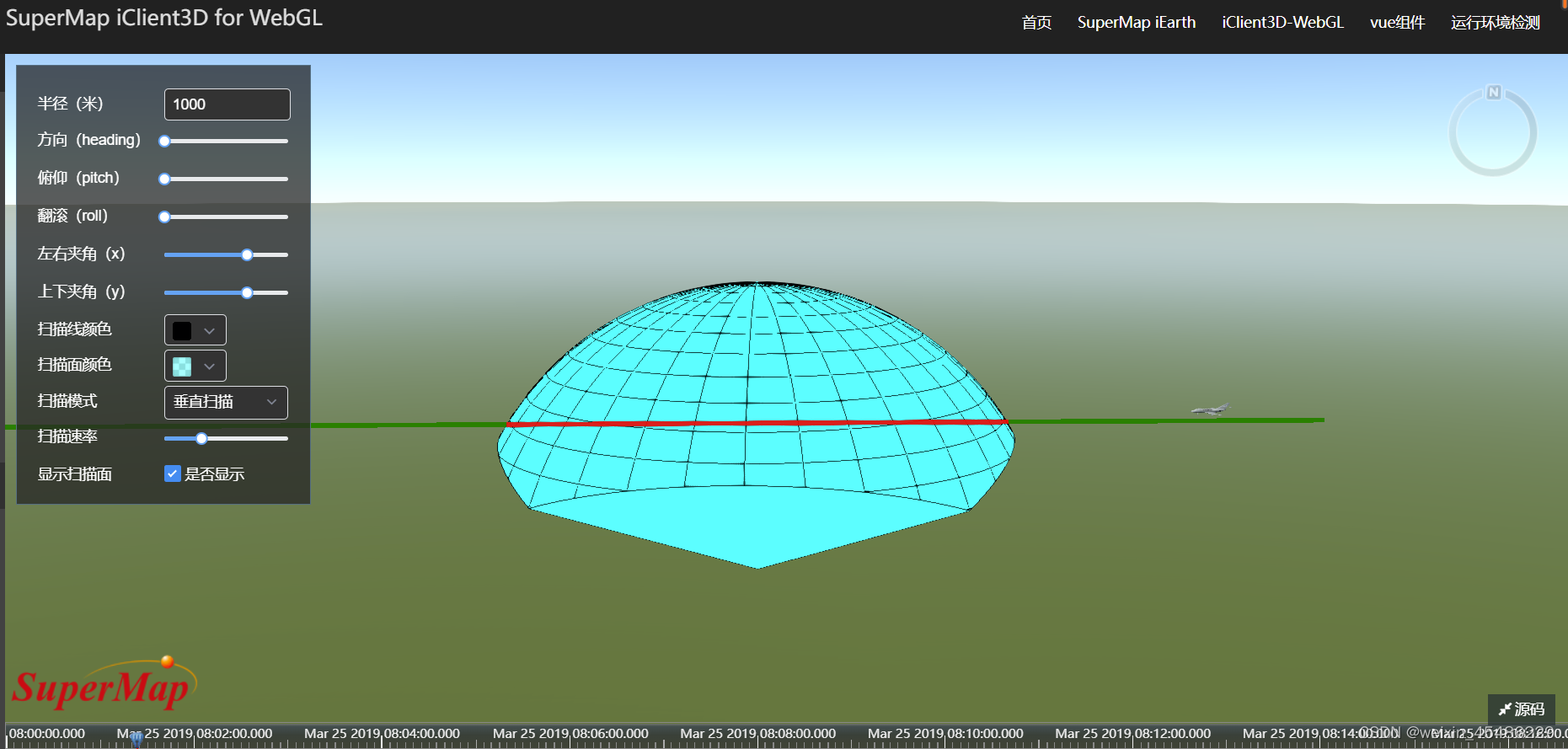
1. Create a radar scanned entity and define the route of the aircraft
First, create a radar scanning entity , Add radar entities by adding entities .
The main codes are as follows :
let sensorEntity = viewer.entities.add({
position: Cesium.Cartesian3.fromDegrees(116.45093826887725, 39.90558654617389, 14.3030),
rectangularSensor: new Cesium.RectangularSensorGraphics({
radius: new Cesium.CallbackProperty(function () {
return +self.radius;
}, false),
slice: 120,// Degree of segmentation
xHalfAngle: new Cesium.CallbackProperty(function () {
return Cesium.Math.toRadians(self.xHalfAngle);
}, false),// Angle between left and right
yHalfAngle: new Cesium.CallbackProperty(function () {
return Cesium.Math.toRadians(self.yHalfAngle);
}, false),// Angle between top and bottom
lineColor: new Cesium.CallbackProperty(function () {
return Cesium.Color.fromCssColorString(self.lineColor);
}, false),// Line color
material: new Cesium.Color(0.0, 1.0, 1.0, 1),// Uniform material
showScanPlane: new Cesium.CallbackProperty(function () {
return self.scanPlane;
}, false),// Display scanning surface
scanPlaneColor: new Cesium.CallbackProperty(function () {
return Cesium.Color.fromCssColorString(self.scanPlaneColor);
}, false),// Scanning surface color
scanPlaneMode: new Cesium.CallbackProperty(function () {
return self.scanPlaneMode ? 'vertical' : 'horizontal';
}, false),// Vertical scan mode
scanPlaneRate: new Cesium.CallbackProperty(function () {
return self.scanPlaneRate;
}, false),// Scanning rate
showIntersection: true,// Whether to display the scanning line with the earth
showThroughEllipsoid: false// Whether to cross the Earth shows
})
});
Then create an aircraft flight path , Let the plane fly along the line . It uses the clock function to make the aircraft fly along the line .
Main code :
// The plane flew along the line
var startTime = Cesium.JulianDate.fromDate(new Date(2019, 2, 25, 16));
var startPosition = Cesium.Cartesian3.fromDegrees(116.47326309033961, 39.90512322998635, 600);
var endTime = Cesium.JulianDate.addSeconds(startTime, 1000, new Cesium.JulianDate());
var endPosition = Cesium.Cartesian3.fromDegrees(116.4189181104128, 39.903026132659456, 600);
viewer.clock.startTime = startTime.clone();
viewer.clock.stopTime = endTime.clone();
viewer.clock.currentTime = startTime.clone();
viewer.clock.clockRange = Cesium.ClockRange.LOOP_STOP; //Loop at the end
viewer.clock.multiplier = 10;
viewer.timeline.zoomTo(startTime, endTime);
var carPositionProperty = new Cesium.SampledPositionProperty();
carPositionProperty.addSample(startTime, startPosition);
carPositionProperty.addSample(endTime, endPosition);
var carPosition = carPositionProperty.getValue(viewer.clock.currentTime);
var heading = Cesium.Math.toRadians(-3);
var pitch = 0;
var roll = 0;
var hpr = new Cesium.HeadingPitchRoll(heading, pitch, roll);
var orientation = Cesium.Transforms.headingPitchRollQuaternion(carPosition, hpr);
var carModel = viewer.entities.add({
name: "gltf",
position: new Cesium.CallbackProperty(function () {
return carPosition;
}, false),
orientation: orientation,
model: {
uri: "./SampleData/gltf/ The airliner model / The airliner model .gltf",
scale: 60
},
viewFrom: new Cesium.Cartesian3(35, 70, 30)
});
viewer.clock.onTick.addEventListener(function () {
var currentTime = Cesium.JulianDate.clone(viewer.clock.currentTime);
carPosition = carPositionProperty.getValue(currentTime);
});
2. Use the interface of intervisibility analysis to find the position coordinates of the aircraft entering and exiting the radar detection range
Use intervisibility analysis to analyze from the takeoff point to the end point to obtain the coordinates of the first obstacle point close to the takeoff point ; Then, the intervisibility analysis is carried out in turn to obtain the coordinates of the second obstacle point away from the takeoff point :
Main code :
// Coordinates of aircraft take-off end position :
takeOffposition = [116.47326309033961, 39.90512322998635, 560]
finishposition = [116.4189181104128, 39.903026132659456, 560]
setTimeout(function () {
// Intervisibility analysis to judge the point position .
sightline.build();
sightline.lineWidth = 3
// Set observation point
sightline.viewPosition = takeOffposition;
// Set the target point
var flag = sightline.addTargetPoint({
position: finishposition,
name: "point0"
});
}, 200)
// The method of obtaining the obstacle points delays the operation , Because intervisibility analysis takes time
setTimeout(function () {
sightline.getBarrierPoint("point0", function (e) {
positions.fisrtObstacle = e.position
})
// Clear the first intervisibility analysis result .
sightline.removeAllTargetPoint();
sightline.viewPosition = finishposition;
var flag1 = sightline.addTargetPoint({
position: takeOffposition,
name: "point1"
});
}, 300)
setTimeout(function () {
sightline.getBarrierPoint("point1", function (e) {
positions.secondObstacle = e.position
})
sightline.removeAllTargetPoint();
}, 380)
3. Use coordinates to build line entities , The radar range is red , Green outside the range .
This is relatively simple and directly attached with code :
// End position to the second entity out of radar range
viewer.entities.add({
id: "test1",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.secondObstacle.longitude * (180 / Math.PI), positions.secondObstacle.latitude * (180 / Math.PI), positions.secondObstacle.height, finishposition[0], finishposition[1], finishposition[2]]),
width: 4.0,
material: Cesium.Color.GREEN.withAlpha(0.9),
depthFailMaterial: Cesium.Color.GREEN.withAlpha(0.9)
}
});
// Start position to enter the radar range entity
viewer.entities.add({
id: "test2",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.fisrtObstacle.longitude * (180 / Math.PI), positions.fisrtObstacle.latitude * (180 / Math.PI), positions.fisrtObstacle.height, takeOffposition[0], takeOffposition[1], takeOffposition[2]]),
width: 4.0,
material: Cesium.Color.GREEN.withAlpha(0.9),
depthFailMaterial: Cesium.Color.GREEN.withAlpha(0.9)
}
});
// Construct a line entity found between two points
viewer.entities.add({
id: "test3",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.secondObstacle.longitude * (180 / Math.PI), positions.secondObstacle.latitude * (180 / Math.PI), positions.secondObstacle.height, positions.fisrtObstacle.longitude * (180 / Math.PI), positions.fisrtObstacle.latitude * (180 / Math.PI), positions.fisrtObstacle.height]),
width: 4.0,
material: Cesium.Color.RED.withAlpha(0.9),
depthFailMaterial: Cesium.Color.RED.withAlpha(0.9)
}
});
The end result is as follows :
边栏推荐
猜你喜欢

Building tin with point cloud

How does the computer check whether the driver is normal

Bayesian inference problem, MCMC and variational inference

Echart: category text position adjustment of horizontal histogram

How to change the status bar at the bottom of win11 to black? How to change the status bar at the bottom of win11 to black

基于趋势和季节性的时间序列预测
MDM数据分析功能说明

视频压缩处理之ffmpeg用法

智能计算系统3 Plugin 集成开发的demo

团体程序设计天梯赛练习题-持续更新中
随机推荐
Nanopc-t4 (rk3399) Game1 OLED (I2C) display time weather temperature
Fontawesome icon for color gradient
多测师肖sirapp中riginal error: Could not extract PIDs from ps output. PIDS: [], Procs: [“bad pid
【324. 摆动排序 II】
数据基础设施升级窗口下,AI 新引擎的技术方法论
From design delivery to development, it is easy and efficient!
Bayesian inference problem, MCMC and variational inference
令人惊艳的NanoPC-T4(RK3399)作为工作站的初始配置和相关应用
团体程序设计天梯赛练习题-持续更新中
Echart: category text position adjustment of horizontal histogram
Constrained Delaunay triangulation in MATLAB
On the first anniversary of the data security law, which four major changes are coming?
请问下flinkcdc用flinksql提交的话只能一个表提交一个任务吗?那有几千张表的时候还能这么
深度学习需要多强的数学基础?
math_ Proving common equivalent infinitesimal & Case & substitution
大火的虚拟人在哪些产业开始发力?
论文阅读:Duplex Contextual Relation Network for Polyp Segmentation
Live app system source code, automatically playing when encountering video dynamically
Ffmpeg learning summary
The amazing nanopc-t4 (rk3399) is used as the initial configuration and related applications of the workstation