当前位置:网站首页>[happy Spring Festival] if you feel happy, dance
[happy Spring Festival] if you feel happy, dance
2022-07-06 05:46:00 【Python's path to immortality】
Project introduction
This project builds a simple and practical dance machine based on the pose estimation model .
Project use PyQT5 Designed a simple interactive interface , The original dance video is displayed on the left , The camera is displayed on the right , Here I use a built-in camera in my notebook , Friends can change other cameras or projectors , May experience better .
Be careful : All materials are from the Internet , If there is infringement , Please contact to delete
B Station video experience is as follows :
b Station video link :https://www.bilibili.com/video/BV1am4y1f7c2/
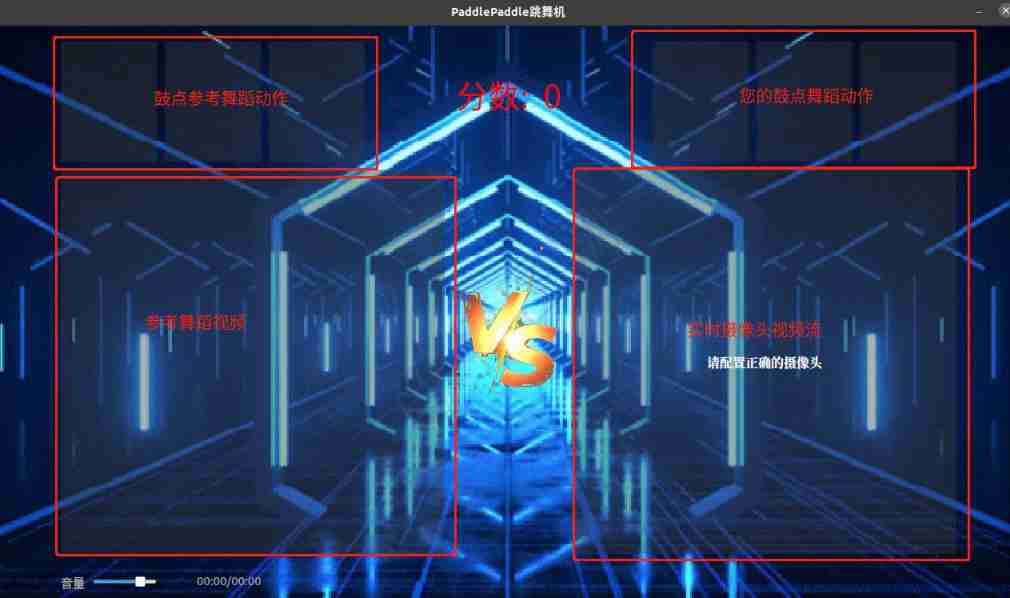
Interface design
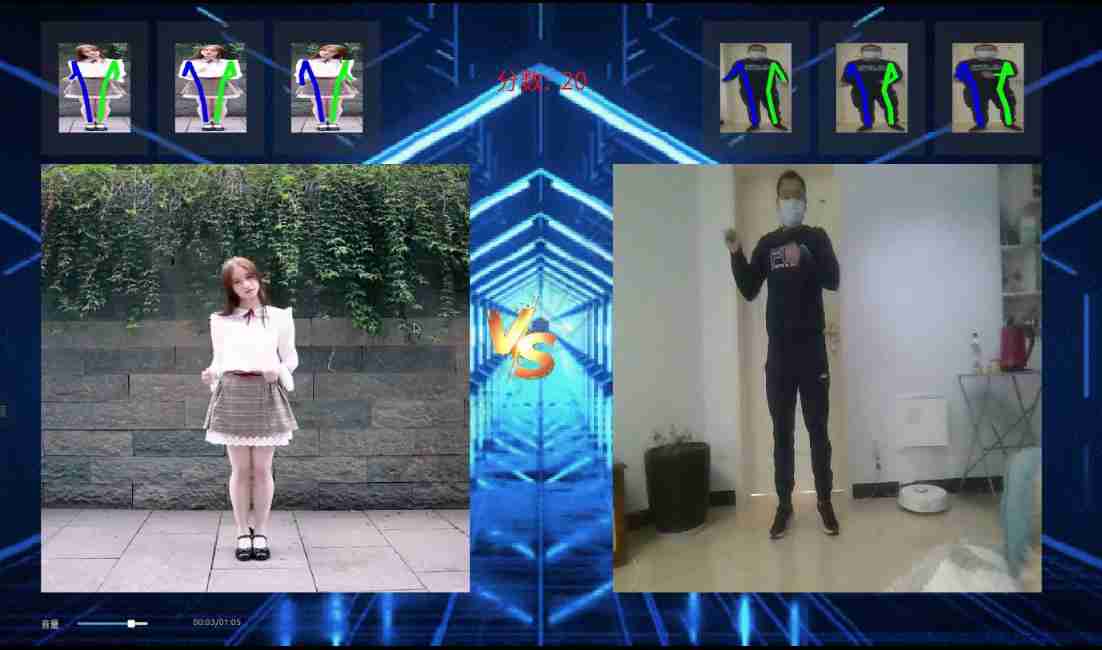
The interface layout is mainly divided into 4 part , The upper middle shows the number of correct posture matching :
- On the top left is the drum beat, which always refers to the posture of the dance
- Below the left is the reference dance video source
- On the top right is the posture of the real-time video when the drum is beating
- On the lower right is the real-time video source of the camera
Menu management
Right click in the reference dance video source area to display the menu , It mainly includes
- Camera settings
- Song management
- Start the game ( Before the game begins )
- Stop swimming at the beginning ( When the game is running )
- Full screen display
- sign out
Click song management to add or delete dance videos , You can also switch the currently selected song in the song list .

Preload dance videos
After adding a dance video , The background of the program will automatically analyze the drum time of the dance video and the corresponding posture description .
Use librosa Ku analyzes the drums of dance songs , Finally, it is converted into the frame number and sequence number corresponding to the video .
y, sr = librosa.load(video_path)
_, beats = librosa.beat.beat_track(y=y, sr=sr)
beat_times = list(librosa.frames_to_time(beats, sr=sr))
beat_times.append(beat_times[-1] + 1)
frameIndex = [round(bt * 25) for bt in beat_times]
After preloading the dance video, it will generate PKL file , Stored in projects/songs in , The dictionary format is as follows :
data = {
"path": video_path,
"fps": capture.get(cv2.CAP_PROP_FPS),
"width": int(capture.get(cv2.CAP_PROP_FRAME_WIDTH)),
"height": int(capture.get(cv2.CAP_PROP_FRAME_HEIGHT)),
"beats": frameIndex,
"poses": [],
"pose_imgs": [],
"start_ends": start_ends,
"count": 0
}
Attitude estimation
Due to the high real-time requirements of human-computer interaction for model reasoning , After investigating many models , The final model selection is PaddleDetection Open source PicoDet-S-Pedestrian as well as PP-TinyPose, Model reasoning time single frame 20ms about , The speed and effect can meet the requirements .
PP-TinyPose yes PaddleDetecion Real time attitude detection model optimized for mobile devices , It can smoothly perform multi person pose estimation tasks on mobile devices . With the help of PaddleDetecion Self developed excellent lightweight detection model PicoDet, We also provide a characteristic lightweight pedestrian detection model .
PP-TinyPose link : https://github.com/PaddlePaddle/PaddleDetection/tree/release/2.3/configs/keypoint/tiny_pose

Attitude matching algorithm
After the estimation of human posture , Compare the pose of the real-time camera with the reference dance video . In practice, it is difficult to synchronize the action time of the two , Here is a simple treatment , It is acceptable not to exceed 10 In the frame range .
The actual comparison is the relevant bone connecting lines on the left and right sides of the human body , In particular, the included angle of the connecting line is compared , stay 15 Within the range of degrees, it is considered to be similar .
The current matching algorithm is very rough , Many further optimizations are needed , Especially in similarity judgment , Key points are adopted in the later stage Graph The way may work better .

The calculation logic of angle matching is as follows :
def angle_match(self, pose_ref, pose_cur, points_index=()):
if len(points_index) != 3:
return False
for i in range(3):
idx = points_index[i]
if pose_ref[idx][2] < 0.3:
print("pose ref true")
return True
def get_angle(pose):
point_1 = pose[points_index[0]]
point_2 = pose[points_index[1]]
point_3 = pose[points_index[2]]
a = math.sqrt((point_2[0] - point_3[0]) * (point_2[0] - point_3[0]) + (point_2[1] - point_3[1]) * (
point_2[1] - point_3[1]))
b = math.sqrt((point_1[0] - point_3[0]) * (point_1[0] - point_3[0]) + (point_1[1] - point_3[1]) * (
point_1[1] - point_3[1]))
c = math.sqrt((point_1[0] - point_2[0]) * (point_1[0] - point_2[0]) + (point_1[1] - point_2[1]) * (
point_1[1] - point_2[1]))
return math.degrees(math.acos((b * b - a * a - c * c) / (-2 * a * c)))
return abs(get_angle(pose_ref) - get_angle(pose_cur)) < 15
def pose_match(self, pose_ref, pose_cur):
canditate_list = [
[7, 5, 11], # elbow, shoulder, hip
[8, 6, 12],
[9, 7, 5], # wirst, elbow, shoulder
[10, 8, 6],
[5, 11, 13], # shoulder, hip, knee
[6, 12, 14],
[11, 13, 15], # hip, knee, angle
[12, 14, 16]
]
err_list = []
for p_idx in canditate_list:
if not self.angle_match(pose_ref, pose_cur, p_idx):
err_list.append(p_idx)
return err_list
At the end
This project requires local operation , Basically operational , The stability and matching effect of the program need to be further optimized .
More function upgrades will be made later , For example, try 3D Posture , Multiplayer mode ,Unity wait .
About author
- Head of Chengdu oar pilot group
- PPDE
- AICA Third stage students
I am here AI Studio Get diamond grade on , Lighten up 10 A badge , Let's talk to each other ~
https://aistudio.baidu.com/aistudio/personalcenter/thirdview/89442
边栏推荐
- 29io stream, byte output stream continue write line feed
- A master in the field of software architecture -- Reading Notes of the beauty of Architecture
- RustDesk 搭建一个自己的远程桌面中继服务器
- How to download GB files from Google cloud hard disk
- Closure, decorator
- H3C S5820V2_5830V2交换机IRF2堆叠后升级方法
- Summary of data sets in intrusion detection field
- YYGH-11-定时统计
- 【SQL server速成之路】——身份驗證及建立和管理用戶賬戶
- B站刘二大人-线性回归 Pytorch
猜你喜欢
ArcGIS应用基础4 专题图的制作
Station B, Master Liu Er - back propagation
01. Project introduction of blog development project
Download, install and use NVM of node, and related use of node and NRM

Game push image / table /cv/nlp, multi-threaded start
c语言——冒泡排序
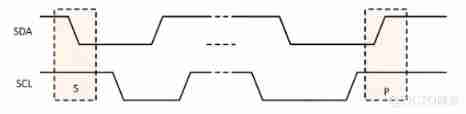
Easy to understand IIC protocol explanation
Migrate Infones to stm32
![[JVM] [Chapter 17] [garbage collector]](/img/f4/e6ff0e3edccf23399ec12b7913749a.jpg)
[JVM] [Chapter 17] [garbage collector]

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
随机推荐
SequoiaDB湖仓一体分布式数据库2022.6月刊
First acquaintance with CDN
Yunxiaoduo software internal test distribution test platform description document
05. 博客项目之安全
Installation de la Bibliothèque de processus PDK - csmc
What preparations should be made for website server migration?
[Tang Laoshi] C -- encapsulation: classes and objects
Yygh-11-timing statistics
类和对象(一)this指针详解
嵌入式面试题(四、常见算法)
How to get list length
Rustdesk builds its own remote desktop relay server
How to download GB files from Google cloud hard disk
P2802 go home
Node 之 nvm 下载、安装、使用,以及node 、nrm 的相关使用
改善Jpopup以实现动态控制disable
28io stream, byte output stream writes multiple bytes
【SQL server速成之路】——身份驗證及建立和管理用戶賬戶
H3C防火墙RBM+VRRP 组网配置
什么是独立IP,独立IP主机怎么样?