当前位置:网站首页>Implementation of yolov5 single image detection based on onnxruntime
Implementation of yolov5 single image detection based on onnxruntime
2022-07-02 07:35:00 【wxplol】
Connected to a be based on pytorch Of YOLOv5 Single picture detection implementation , We did pytorch Forward reasoning , But this reasoning process needs to rely on yolov5 Its own model file and the process of structure construction , So it's still troublesome . here , Is there a direct forward reasoning , Then only process the results , Don't need to consider yolov5 Own documents . So now the introduction is based on onnx The reasoning of . The reasoning process is also very simple , Convert the original model into onnx Format , And then use onnxruntime Just do it , See my article for specific operation .
List of articles
One 、pt turn onnx
Here we mainly refer to :https://github.com/ultralytics/yolov5/issues/251 Content in , Get into yolov5 The installation directory , Perform the following :
python models/export.py --weights yolov5s.pt --img 640 --batch 1
Two 、onnxruntime Forward reasoning
1. Installation dependency
pip install onnxruntime
2. Code implementation
# coding=utf-8
import cv2.cv2 as cv2
import numpy as np
import onnxruntime
import torch
import torchvision
import time
import random
class YOLOV5_ONNX(object):
def __init__(self,onnx_path):
''' initialization onnx'''
self.onnx_session=onnxruntime.InferenceSession(onnx_path)
self.input_name=self.get_input_name()
self.output_name=self.get_output_name()
def get_input_name(self):
''' Get input node name '''
input_name=[]
for node in self.onnx_session.get_inputs():
input_name.append(node.name)
return input_name
def get_output_name(self):
''' Get the output node name '''
output_name=[]
for node in self.onnx_session.get_outputs():
output_name.append(node.name)
return output_name
def get_input_feed(self,image_tensor):
''' Get input tensor'''
input_feed={
}
for name in self.input_name:
input_feed[name]=image_tensor
return input_feed
def letterbox(self,img, new_shape=(640, 640), color=(114, 114, 114), auto=False, scaleFill=False, scaleup=True,
stride=32):
''' Picture normalization '''
# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratio, (dw, dh)
def xywh2xyxy(self,x):
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
def nms(self,prediction, conf_thres=0.1, iou_thres=0.6, agnostic=False):
if prediction.dtype is torch.float16:
prediction = prediction.float() # to FP32
xc = prediction[..., 4] > conf_thres # candidates
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
output = [None] * prediction.shape[0]
for xi, x in enumerate(prediction): # image index, image inference
x = x[xc[xi]] # confidence
if not x.shape[0]:
continue
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
box = self.xywh2xyxy(x[:, :4])
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((torch.tensor(box), conf, j.float()), 1)[conf.view(-1) > conf_thres]
n = x.shape[0] # number of boxes
if not n:
continue
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.boxes.nms(boxes, scores, iou_thres)
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
output[xi] = x[i]
return output
def clip_coords(self,boxes, img_shape):
''' Check to see if it's out of bounds '''
# Clip bounding xyxy bounding boxes to image shape (height, width)
boxes[:, 0].clamp_(0, img_shape[1]) # x1
boxes[:, 1].clamp_(0, img_shape[0]) # y1
boxes[:, 2].clamp_(0, img_shape[1]) # x2
boxes[:, 3].clamp_(0, img_shape[0]) # y2
def scale_coords(self,img1_shape, coords, img0_shape, ratio_pad=None):
''' The coordinates correspond to the original image , Reverse operation : subtract pad, Divided by the minimum zoom factor :param img1_shape: Enter dimensions :param coords: Enter coordinates :param img0_shape: Mapped dimensions :param ratio_pad: :return: '''
# Rescale coords (xyxy) from img1_shape to img0_shape
if ratio_pad is None: # calculate from img0_shape
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new, Calculate the zoom ratio
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (
img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding , Calculate the expanded size
else:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:, [0, 2]] -= pad[0] # x padding, subtract x Expansion in direction
coords[:, [1, 3]] -= pad[1] # y padding, subtract y Expansion in direction
coords[:, :4] /= gain # take box The coordinates correspond to the original image
self.clip_coords(coords, img0_shape) # Boundary check
return coords
def sigmoid(self,x):
return 1 / (1 + np.exp(-x))
def infer(self,img_path):
''' Perform the forward operation to predict the output '''
# Super parameter settings
img_size=(640,640) # Picture zoom size
conf_thres=0.25 # Confidence threshold
iou_thres=0.45 #iou threshold
class_num=1 # Number of categories
stride=[8,16,32]
anchor_list= [[10,13, 16,30, 33,23],[30,61, 62,45, 59,119], [116,90, 156,198, 373,326]]
anchor = np.array(anchor_list).astype(np.float).reshape(3,-1,2)
area = img_size[0] * img_size[1]
size = [int(area / stride[0] ** 2), int(area / stride[1] ** 2), int(area / stride[2] ** 2)]
feature = [[int(j / stride[i]) for j in img_size] for i in range(3)]
# Read the picture
src_img=cv2.imread(img_path)
src_size=src_img.shape[:2]
# Picture filling and normalization
img=self.letterbox(src_img,img_size,stride=32)[0]
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img)
# normalization
img=img.astype(dtype=np.float32)
img/=255.0
# # BGR to RGB
# img = img[:, :, ::-1].transpose(2, 0, 1)
# img = np.ascontiguousarray(img)
# Dimension expansion
img=np.expand_dims(img,axis=0)
# Forward reasoning
start=time.time()
input_feed=self.get_input_feed(img)
pred=self.onnx_session.run(output_names=self.output_name,input_feed=input_feed)
# Extract features
y = []
y.append(torch.tensor(pred[0].reshape(-1,size[0]*3,5+class_num)).sigmoid())
y.append(torch.tensor(pred[1].reshape(-1,size[1]*3,5+class_num)).sigmoid())
y.append(torch.tensor(pred[2].reshape(-1,size[2]*3,5+class_num)).sigmoid())
grid = []
for k, f in enumerate(feature):
grid.append([[i, j] for j in range(f[0]) for i in range(f[1])])
z = []
for i in range(3):
src = y[i]
xy = src[..., 0:2] * 2. - 0.5
wh = (src[..., 2:4] * 2) ** 2
dst_xy = []
dst_wh = []
for j in range(3):
dst_xy.append((xy[:, j * size[i]:(j + 1) * size[i], :] + torch.tensor(grid[i])) * stride[i])
dst_wh.append(wh[:, j * size[i]:(j + 1) * size[i], :] * anchor[i][j])
src[..., 0:2] = torch.from_numpy(np.concatenate((dst_xy[0], dst_xy[1], dst_xy[2]), axis=1))
src[..., 2:4] = torch.from_numpy(np.concatenate((dst_wh[0], dst_wh[1], dst_wh[2]), axis=1))
z.append(src.view(1, -1, 5+class_num))
results = torch.cat(z, 1)
results = self.nms(results, conf_thres, iou_thres)
cast=time.time()-start
print("cast time:{}".format(cast))
# Map to the original image
img_shape=img.shape[2:]
print(img_size)
for det in results: # detections per image
if det is not None and len(det):
det[:, :4] = self.scale_coords(img_shape, det[:, :4],src_size).round()
if det is not None and len(det):
self.draw(src_img, det)
def plot_one_box(self,x, img, color=None, label=None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def draw(self,img, boxinfo):
colors = [[0, 0, 255]]
for *xyxy, conf, cls in boxinfo:
label = '%s %.2f' % ('image', conf)
print('xyxy: ', xyxy)
self.plot_one_box(xyxy, img, label=label, color=colors[int(cls)], line_thickness=1)
cv2.namedWindow("dst",0)
cv2.imshow("dst", img)
cv2.imwrite("data/res1.jpg",img)
cv2.waitKey(0)
# cv2.imencode('.jpg', img)[1].tofile(os.path.join(dst, id + ".jpg"))
return 0
if __name__=="__main__":
model=YOLOV5_ONNX(onnx_path="./weights/image_detect.onnx")
model.infer(img_path="data/PMC2663376_00004.jpg")
result :
3、onnxruntime and pytorch Compare
- onnxruntime Reasoning time
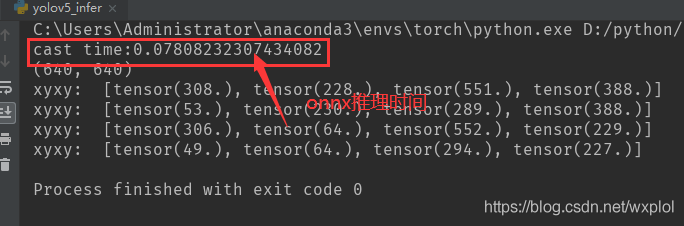
- pytorch Reasoning time

We are normalizing to 640x640 Compare on the image ,onnx Inferential than pure pytorch Time has improved 1 times . explain onnx Reasoning is still possible , Later, it will be tested on other acceleration frameworks , Look forward to the follow-up ...
github link :yolov5 Forward reasoning implementation
Reference link :
onnxruntime-for-yolov5
python3 onnx Reasoning Demo
边栏推荐
- Faster-ILOD、maskrcnn_ Benchmark training coco data set and problem summary
- MMDetection模型微调
- Drawing mechanism of view (3)
- 【MEDICAL】Attend to Medical Ontologies: Content Selection for Clinical Abstractive Summarization
- 中年人的认知科普
- parser.parse_args 布尔值类型将False解析为True
- Optimization method: meaning of common mathematical symbols
- 类加载器及双亲委派机制
- 离线数仓和bi开发的实践和思考
- view的绘制机制(三)
猜你喜欢
![[paper introduction] r-drop: regulated dropout for neural networks](/img/09/4755e094b789b560c6b10323ebd5c1.png)
[paper introduction] r-drop: regulated dropout for neural networks

读《敏捷整洁之道:回归本源》后感
![[tricks] whiteningbert: an easy unsupervised sentence embedding approach](/img/8e/3460fed55f2a21f8178e7b6bf77d56.png)
[tricks] whiteningbert: an easy unsupervised sentence embedding approach

SSM二手交易网站
![[model distillation] tinybert: distilling Bert for natural language understanding](/img/c1/e1c1a3cf039c4df1b59ef4b4afbcb2.png)
[model distillation] tinybert: distilling Bert for natural language understanding
![[introduction to information retrieval] Chapter 3 fault tolerant retrieval](/img/75/ac2fdcd256f5c2336ca53c7a2744b8.png)
[introduction to information retrieval] Chapter 3 fault tolerant retrieval

【Ranking】Pre-trained Language Model based Ranking in Baidu Search

mmdetection训练自己的数据集--CVAT标注文件导出coco格式及相关操作
Play online games with mame32k
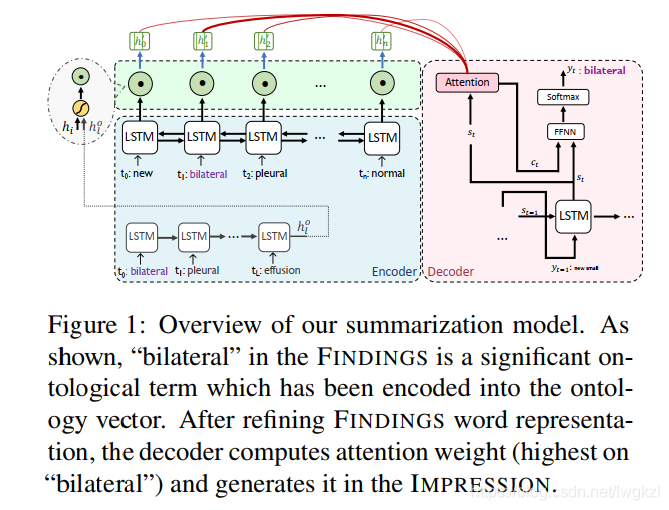
【MEDICAL】Attend to Medical Ontologies: Content Selection for Clinical Abstractive Summarization
随机推荐
【Torch】解决tensor参数有梯度,weight不更新的若干思路
【Ranking】Pre-trained Language Model based Ranking in Baidu Search
【模型蒸馏】TinyBERT: Distilling BERT for Natural Language Understanding
软件开发模式之敏捷开发(scrum)
Regular expressions in MySQL
MySQL无order by的排序规则因素
SSM实验室设备管理
【信息检索导论】第二章 词项词典与倒排记录表
Interpretation of ernie1.0 and ernie2.0 papers
Drawing mechanism of view (I)
【论文介绍】R-Drop: Regularized Dropout for Neural Networks
Faster-ILOD、maskrcnn_ Benchmark training coco data set and problem summary
Find in laravel8_ in_ Usage of set and upsert
基于pytorch的YOLOv5单张图片检测实现
ABM论文翻译
Cognitive science popularization of middle-aged people
Faster-ILOD、maskrcnn_ Benchmark trains its own VOC data set and problem summary
ERNIE1.0 与 ERNIE2.0 论文解读
Delete the contents under the specified folder in PHP
Use matlab to realize: chord cut method, dichotomy, CG method, find zero point and solve equation