当前位置:网站首页>Déchirure à la main - tri
Déchirure à la main - tri
2022-07-02 03:53:00 【Programmer Share】
Insérer un tri
Insérer le tri à condition queLa séquence est ordonnée lorsqu'elle n'est pas insérée.
Si c'est trié de petit à grand,Le nombre d'Inserts estkey,Rechercher de droite à gauche jusqu'àkeyValeur de,Si ce n'est pas le cas, déplacez l'original d'un bit vers l'arrière pour l'écraser,Jusqu'à ce qu'il soit satisfait ou trouvé pour l'insertion.
Répétez l'opération ci - dessus.
void InsertSort(int* a, int n)
{
int i = 0;
for (i = 0; i < n-1; i++)
{
int end=i;
int key = a[end + 1];
while (end>=0)
{
if (a[end] <= key)
break;
else
a[end + 1] = a[end];
end--;
}
a[end + 1] = key;
}
}
Complexité temporelleO(n*n)
Cet ordre convient à des situations proches de l'ordre ,Dans ce casComplexité temporelle procheO(n)
Tri Hill
Il y a des séquences d'insertion qui ont évolué
Le tri de Hill comporte deux étapes :
1.Pré - tri( Soyez aussi ordonné que possible )
2.Insérer un tri
Exemple:
Pré - tri: Diviser un groupe de nombres à trier en gapGroupe, Chaque groupe est inséré et trié
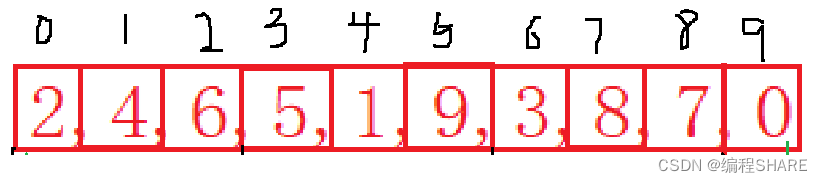
Prends ça.10 Le nombre de groupes est divisé en 3Groupe:
No1Groupe:2,5,3,0
No2Groupe:4,1,8
No3Groupe:6,9,7
L'ordre après le préconditionnement 
Dernier tri complet des Inserts ,Pour obtenir une séquence ordonnée.
Le Code de l'exemple ci - dessus :
void ShellSort(int* a, int n)
{
int gap = 3;
for (int i = 0; i < n-gap; i++)
{
int end=i;
int key = a[end + gap];
while (end >= 0)
{
if (a[end] <= key)
break;
else
a[end + gap] = a[end];
end -= gap;
}
a[end + gap] = key;
}
InsertSort(a, n);
}
Diagramme dynamique de l'ordre de Hill 
void ShellSort(int* a, int n)
{
int gap = n;
while (gap>1)
{
gap = gap / 2;
for (int i = 0; i < n-gap; i++)
{
int end = i;
int key = a[end + gap];
while (end >= 0)
{
if (a[end] <= key)
break;
else
a[end + gap] = a[end];
end -= gap;
}
a[end + gap] = key;
}
}
}
Sélectionner le tri

Choisir le tri est simple, Chaque fois que vous choisissez le plus petit inverse devant , Choisissez le plus grand et mettez - le à l'arrière .
void SelectSort(int* a, int n)
{
int min, max;
int begin = 0, end = n - 1;
while (begin < end)
{
min = max = begin;
for (int i = begin; i <= end; i++)
{
if (a[min] > a[i])
min = i;
if (a[max] < a[i])
max = i;
}
swap(&a[min], &a[begin]);
//Attention!
if (begin == max)
max = min;
swap(&a[max], &a[end]);
begin++;
end--;
}
}
Complexité temporelleO(N)
Tri du tas

void AdjustDwon(int* a, int n, int root)
{
int father = root;
int child = 2 * father + 1;
while (child <n)
{
if (child<n - 1 && a[child]<a[child + 1])
child++;
if (a[father] < a[child])
{
swap(&a[father], &a[child]);
father = child;
child = 2 * father + 1;
}
else
return;
}
}
void HeapSort(int* a, int n)
{
int i = 0;
for (i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDwon(a, n, i);
}
for (i = n - 1; i > 0; i--)
{
swap(&a[0], &a[i]);
AdjustDwon(a, i-1, 0);
}
}
Tri des bulles

void BubbleSort(int* a, int n)
{
int begin = 0;
int end = n - 1;
for (int i = begin; i < n-1; i++)
{
for (int j = begin; j < end; j++)
{
if (a[j+1] < a[j])
swap(&a[j], &a[j+1]);
}
end--;
}
}
Tri rapide

L'idée de base d'un tri rapide est : Choisissez une valeur de base , En général, la valeur de base la plus à gauche est sélectionnée , Et puis la traversée commence à droite , Supposons qu'il s'agisse d'un ordre allant du plus petit au plus grand , Alors, cherchez la petite à droite , Après avoir trouvé le petit , Cherchez le plus grand , Après avoir trouvé, les deux ont échangé . Ensuite, répétez le processus ci - dessus , Jusqu'à ce que la gauche soit supérieure ou égale à la droite , Et puis on échange avec la base .
C'est un tour.
int PartSort1(int* a, int left, int right)
{
int keyi = left;
while (left < right)
{
while (left < right && a[keyi] <= a[right])
right--;
while (left < right && a[left] <= a[keyi])
left++;
swap(&a[left], &a[right]);
}
swap(&a[keyi], &a[right]);
keyi = left;
return keyi;
}
Méthode de localisation des puits : Prenez la base comme position de la fosse , Commencez à droite et cherchez la petite (Plus petit que la base)De, Remplir la fosse une fois trouvée , Cette position devient la position de la fosse , Ensuite, commencez à gauche et cherchez le grand , Ensuite, remplissez la fosse , Jusqu'à ce que la recherche soit terminée (Gauche supérieure ou égale à droite), Remplir la base dans la fosse .
int PartSort2(int* a, int left, int right)
{
int keyi= left;
int temp = a[left];
while (left < right)
{
while (left<right&&a[right] >= temp)
{
right--;
}
a[keyi] = a[right];
keyi = right;
while (left < right && a[left] <= temp)
{
left++;
}
a[keyi] = a[left];
keyi = left;
}
a[keyi] = temp;
return keyi;
}
Méthode du pointeur avant et arrière:
Le pointeur avant commence à la position avant la base , Le pointeur arrière commence à la position de base . Le pointeur avant est plus petit , Quand j'ai trouvé l'enfant , Pointeur arrière plus un , Les valeurs indiquées par les pointeurs avant et arrière sont ensuite échangées , Puis le pointeur avant continue à chercher la petite , Jusqu'à ce que la recherche soit terminée .
int PartSort3(int* a, int left, int right)
{
int keyi = left;
int front = keyi + 1;
int back = keyi;
while (front <= right)
{
if (a[front] <= a[keyi])
{
back++;
swap(&a[front], &a[back]);
}
front++;
}
swap(&a[back], &a[keyi]);
keyi = back;
return keyi;
}
Ce qui précède décrit un cycle de tri , Après chaque tour , Peut déterminer la position de la base après l'ordre , La base gauche est plus petite que ça , À droite, c'est plus grand que ça , Continuez à trier à gauche , La droite continue à trier . Arrête de trier quand il en reste un à trier .
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int keyi = left;
//keyi = PartSort1(a, left, right);
//keyi = PartSort2(a, left, right);
keyi = PartSort3(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi + 1, right);
}
Ce genre de tri n'est pas encore possible , Parce que sa pire complexité temporelle est O(N*N), La base que nous prenons est de préférence la valeur médiane du Groupe avec des nombres ordinaux , Mais cette valeur n'est pas facile à trouver dans le désordre ,À ce stade, nous utilisons3 Méthode de centrage des nombres , Mettez la valeur la plus latérale , La valeur la plus à droite , Et une valeur intermédiaire ,3 Pour comparer , Le plus grand est la base . Pour être sûr que c'est toujours la méthode ci - dessus , Nous échangeons la base contre le nombre le plus à gauche .
int ThreeIn(int* a, int left, int right)
{
int middle = left + (right - left) / 2;
if (a[middle] < a[left])
{
if (a[left] < a[right])
return left;
else if (a[middle] < a[right])
return right;
else
return middle;
}
else
{
if (a[middle] < a[right])
return middle;
else if (a[left] < a[right])
return right;
else
return left;
}
}
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int keyi = left;
int x = ThreeIn(a, left, right);
swap(&a[keyi], &a[x]);
//keyi = PartSort1(a, left, right);
//keyi = PartSort2(a, left, right);
keyi = PartSort3(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi + 1, right);
}
Complexité temporelleO(N*logN)
Sur la base de l'extrême gauche , Pourquoi commencer à droite en premier ?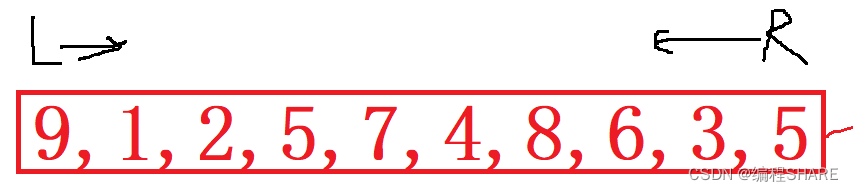
InLAvecR Il n'y a rien à discuter pendant l'échange , Le plus important, c'est quand on se rencontre et qu'on échange la base :
1.RRencontreL,En ce momentL Pour le plus petit ou la base ,Après l'échange,Gauche petite droite grande.
2.LRencontreR:
(1)LAvecRPas d'échange.
R La position est petite ,R Il y a de grandes , Il y a de petits , Peut être échangé avec la valeur de base .
(2)LAvecREchange
Après l'échangeR Ou continuer à se déplacer dans de petits endroits ,Et puis(1)C'est pareil.
Nous discuterons de choisir la gauche comme valeur de base , Ou discuter de la rencontre
1.LRencontreR
(1) Je me suis rencontré sans échange , Impossible de déterminer la taille de la valeur de base lors de la rencontre .
(2)LAvecR On se retrouve après l'échange , La rencontre est grande , Impossible d'échanger avec la valeur de base .
2.RRencontreL
RRencontreLDescriptionRAvecLJ'ai échangé., La valeur de base est petite ,Peut être échangé.
En résumé: Le fait de commencer à gauche ne garantit pas entièrement que l'endroit où vous vous rencontrerez sera petit .
Tri rapide sous forme non récursive
1. Mise en œuvre avec pile
Stocke les limites supérieure et inférieure d'un ensemble de nombres avec une pile , Si vous choisissez la base à partir de la gauche , Selon les caractéristiques de la pile , Nous stockons d'abord la limite gauche , Et la limite droite . Chaque tri sort de la pile 2Données. Lorsque vous stockez une limite dans la pile, voulez - vous que la limite principale ait des éléments directement .
void QuickSortNonR1(int* a, int left, int right)
{
Stack p;
InitStack(&p);
StackPush(&p, left);
StackPush(&p, right);
while (!StackEmpty(&p))
{
right = StackTop(&p);
StackPop(&p);
left = StackTop(&p);
StackPop(&p);
int keyi = PartSort3(a, left, right);
if (keyi + 1 < right)
{
StackPush(&p, keyi+1);
StackPush(&p, right);
}
if (keyi - 1 > left)
{
StackPush(&p, left);
StackPush(&p, keyi-1);
}
}
StackDestroy(&p);
}
2.Mise en œuvre en file d'attente
Selon la nature de la file d'attente , Stockez d'abord la limite droite , Et la limite gauche . Le processus suivant est similaire à la pile
void QuickSortNonR2(int* a, int left, int right)
{
Queue p;
QueueInit(&p);
QueuePush(&p, right);
QueuePush(&p, left);
while (!QueueEmpty(&p))
{
right = QueueFront(&p);
QueuePop(&p);
left= QueueFront(&p);
QueuePop(&p);
int keyi = PartSort3(a, left, right);
if (keyi - 1 > left)
{
QueuePush(&p, keyi - 1);
QueuePush(&p, left);
}
if (keyi + 1 < right)
{
QueuePush(&p, right);
QueuePush(&p, keyi + 1);
}
}
QueueDestroy(&p);
}
Ordre de fusion
边栏推荐
- go 包的使用
- Network connection mode of QT
- 蓝桥杯单片机数码管技巧
- How to solve the code error when storing array data into the database
- Suggestions on settlement solution of u standard contract position explosion
- 毕设-基于SSM电影院购票系统
- The 9th Blue Bridge Cup single chip microcomputer provincial competition
- Qt插件之Qt Designer插件实现
- Set vscode. When double clicking, the selected string includes the $symbol - convenient for PHP operation
- How about Ping An lifetime cancer insurance?
猜你喜欢
蓝桥杯单片机省赛第十一届

Basic syntax of unity script (6) - specific folder
NLog使用
蓝桥杯单片机省赛第十一届第一场
0 foundation how to learn automated testing? Follow these seven steps step by step and you will succeed

How to do medium and long-term stocks, and what are the medium and long-term stock trading skills?
2022-07-01:某公司年会上,大家要玩一食发奖金游戏,一共有n个员工, 每个员工都有建设积分和捣乱积分, 他们需要排成一队,在队伍最前面的一定是老板,老板也有建设积分和捣乱积分, 排好队后,所有

Jetpack之LiveData扩展MediatorLiveData
跳出舒适区,5年点工转型自动化测试工程师,我只用了3个月时间

The first practical project of software tester: web side (video tutorial + document + use case library)
随机推荐
Kotlin basic learning 13
The fourth provincial competition of Bluebridge cup single chip microcomputer
SQL: common SQL commands
High performance and low power cortex-a53 core board | i.mx8m Mini
Oracle 查看被锁的表和解锁
[ibdfe] matlab simulation of frequency domain equalization based on ibdfe
Basic syntax of unity script (6) - specific folder
VS2010 plug-in nuget
Monkey测试
Influence of air resistance on the trajectory of table tennis
Oracle common SQL
潘多拉 IOT 开发板学习(RT-Thread)—— 实验1 LED 闪烁实验(学习笔记)
The 6th Blue Bridge Cup single chip microcomputer provincial competition
Jetpack's livedata extension mediatorlivedata
In wechat applet, the externally introduced JS is used in xwml for judgment and calculation
UI (New ui:: MainWindow) troubleshooting
[designmode] Prototype Pattern
【人员密度检测】基于形态学处理和GRNN网络的人员密度检测matlab仿真
BiShe cinema ticket purchasing system based on SSM
集成底座方案演示说明