当前位置:网站首页>蓝桥杯单片机省赛第十一届第二场
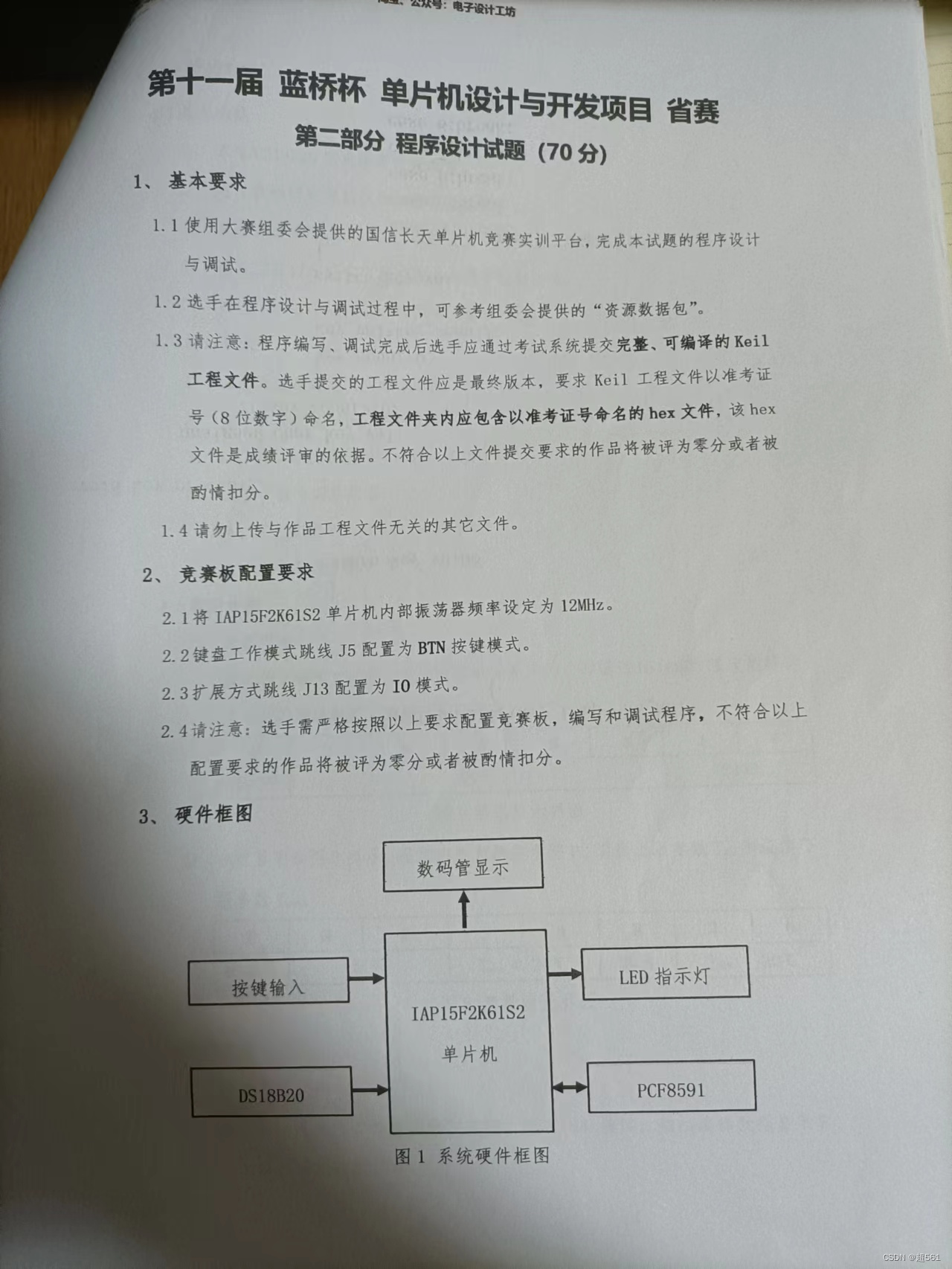
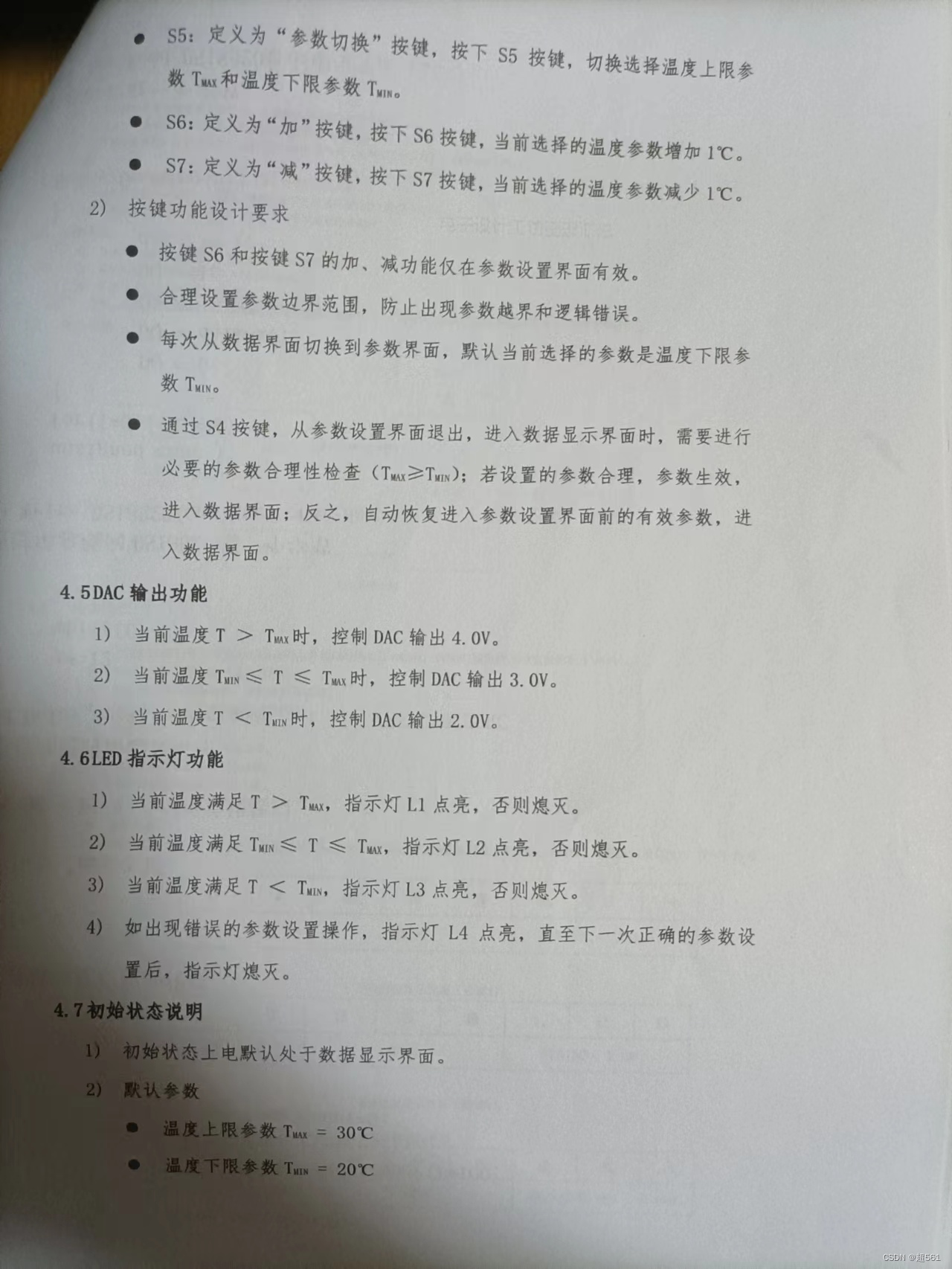
蓝桥杯单片机省赛第十一届第二场
2022-07-02 03:29:00 【超561】

main.c
#include <STC15F2K60S2.H>
#include <ONEWIRE.H>
#include <IIC.H>
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned char smg_display[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned int smg_count;
unsigned char display_mode;
unsigned int temp;
unsigned int temp_count;
unsigned int Tmax_set=30;
unsigned int Tmin_set=20;
unsigned int Tmax=30;
unsigned int Tmin=20;
unsigned int da_count;
unsigned int led_count;
unsigned char led_ctrl=0xff;
bit led_flag;
void da(unsigned char date)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x40);
IIC_WaitAck();
IIC_SendByte(date);
IIC_WaitAck();
IIC_Stop();
}
void da_process()
{
if(da_count>10)
{
da_count=0;
if(temp<Tmin)
{
da(51*2);
}
if((Tmin<=temp)&&(temp<=Tmax))
{
da(51*3);
}
if(temp>Tmax)
{
da(51*4);
}
}
}
void led_process()
{
if(led_count>10)
{
led_count=0;
if(temp<Tmin)
{
led_ctrl&=~0x04;
}
else
{
led_ctrl|=0x04;
}
if((temp<=Tmax)&&(temp>=Tmin))
{
led_ctrl&=~0x02;
}
else
{
led_ctrl|=0x02;
}
if(temp>Tmax)
{
led_ctrl&=~0x01;
}
else
{
led_ctrl|=0x01;
}
if(led_flag)
{
led_ctrl&=~0x08;
}
else
{
led_ctrl|=0x08;
}
Device_ctrl(0x80,led_ctrl);
}
}
void temp_process()
{
if(temp_count>100)
{
temp_count=0;
temp=read_temp();
Init_temp();
}
}
void smg_show()
{
unsigned char i;
Device_ctrl(0xc0,0);
Device_ctrl(0xe0,~smg_display[i]);
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
if(smg_count>3)
{
smg_count=0;
if(display_mode==0)
{
smg_display[0]=0x39;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=smg_du[temp/10];
smg_display[7]=smg_du[temp%10];
}
else if(display_mode==1)
{
smg_display[0]=0x73;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=smg_du[Tmax_set/10];
smg_display[4]=smg_du[Tmax_set%10];
smg_display[5]=0x00;
smg_display[6]=smg_du[Tmin_set/10];
smg_display[7]=smg_du[Tmin_set%10];
}
}
}
unsigned char Trig_btn;
unsigned char Cont_btn;
unsigned int key_count;
bit key_set;
void key_btn()
{
unsigned char readdate=P3^0XFF;
Trig_btn=readdate&(Cont_btn^readdate);
Cont_btn=readdate;
}
void key_process()
{
if(key_count>10)
{
key_count=0;
key_btn();
if(Trig_btn==0x08)//s4
{
display_mode++;
if(display_mode==2)
{
if(Tmax_set>=Tmin_set)
{
Tmax=Tmax_set;
Tmin=Tmin_set;
led_flag=0;
}
else
{
Tmax=Tmax;
Tmin=Tmin;
Tmax_set=Tmax;
Tmin_set=Tmin;
led_flag=1;
}
display_mode=0;
}
}
if(Trig_btn==0x04)//s5
{
key_set=~key_set;
}
if(Trig_btn==0x02)//s6
{
if(display_mode==1)
{
if(key_set==0)
{
if(Tmax_set<99)
{
Tmax_set++;
}
}
else
{
if(Tmin_set<99)
{
Tmin_set++;
}
}
}
}
if(Trig_btn==0x01)//s7
{
if(display_mode==1)
{
if(key_set==0)
{
if(Tmax_set>0)
{
Tmax_set--;
}
}
else
{
if(Tmin_set>0)
{
Tmin_set--;
}
}
}
}
}
}
void Timer2Init() //1毫秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x18; //设置定时初值
T2H = 0xFC; //设置定时初值
AUXR |= 0x10; //定时器2开始计时
IE2|=0x04;
EA=1;
}
void main()
{
Timer2Init();
while(1)
{
key_process();
smg_process();
temp_process();
da_process();
led_process();
}
}
void timer2service() interrupt 12
{
key_count++;
smg_count++;
temp_count++;
da_count++;
led_count++;
smg_show();
}iic.c
#include "iic.h"
#define DELAY_TIME 5
//I2C总线内部延时函数
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//I2C总线启动信号
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//I2C总线停止信号
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//发送应答或非应答信号
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit;
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待应答
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//I2C总线发送一个字节数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//I2C总线接收一个字节数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
iic.h
#ifndef __IIC_H
#define __IIC_H
#include <STC15F2K60S2.H>
#include "intrins.h"
sbit SDA = P2^1;
sbit SCL = P2^0;
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
#endifonewire.c
#include "onewire.h"
//单总线内部延时函数
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
//单总线写操作
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//单总线读操作
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
void Init_temp()
{
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
}
float read_temp()
{
float temp;
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low=Read_DS18B20();
high=Read_DS18B20();
temp=(high<<8)|low;
temp=temp*0.0625;
return temp;
}
onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
float read_temp();
void Init_temp();
#endif
边栏推荐
- Global and Chinese markets for infant care equipment, 2022-2028: Research Report on technology, participants, trends, market size and share
- [yolo3d]: real time detection of end-to-end 3D point cloud input
- /silicosis/geo/GSE184854_ scRNA-seq_ mouse_ lung_ ccr2/GSE184854_ RAW/GSM5598265_ matrix_ inflection_ demult
- On redis (II) -- cluster version
- GSE104154_ scRNA-seq_ fibrotic MC_ bleomycin/normalized AM3
- [mv-3d] - multi view 3D target detection network
- Verilog timing control
- "Analysis of 43 cases of MATLAB neural network": Chapter 41 implementation of customized neural network -- personalized modeling and Simulation of neural network
- venn圖取交集
- spark调优
猜你喜欢
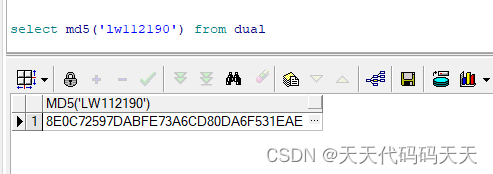
Oracle的md5
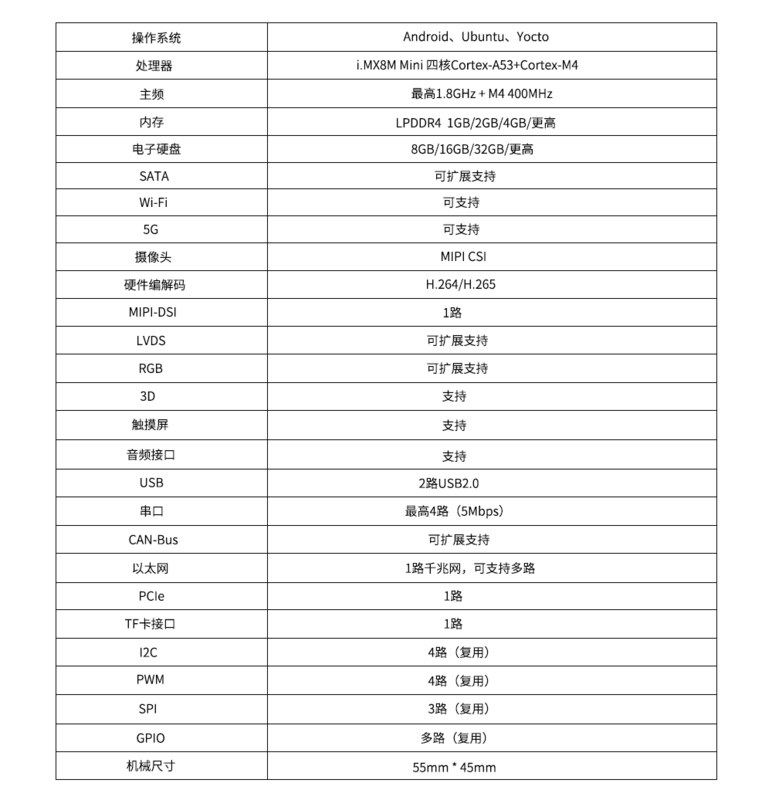
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini

Docker安装canal、mysql进行简单测试与实现redis和mysql缓存一致性
Docker installs canal and MySQL for simple testing and implementation of redis and MySQL cache consistency

How to establish its own NFT market platform in 2022
Halcon image rectification
West digital decided to raise the price of flash memory products immediately after the factory was polluted by materials

"Analysis of 43 cases of MATLAB neural network": Chapter 42 parallel operation and neural network - parallel neural network operation based on cpu/gpu

Unity脚本的基础语法(6)-特定文件夹
NLog使用
随机推荐
初出茅庐市值1亿美金的监控产品Sentry体验与架构
数据传输中的成帧
West digital decided to raise the price of flash memory products immediately after the factory was polluted by materials
In depth interpretation of pytest official documents (26) customized pytest assertion error information
In the era of programmers' introspection, five-year-old programmers are afraid to go out for interviews
Use blocking or non blocking for streamline
Basic syntax of unity script (8) - collaborative program and destruction method
Grpc quick practice
Intersection of Venn graph
Load different fonts in QML
Kotlin 基础学习13
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
SAML2.0 notes (I)
Uniapp uses canvas to generate posters and save them locally
Retrofit's callback hell is really vulnerable in kotlin synergy mode
leetcode-1380. Lucky number in matrix
ThreadLocal详解
C # joint Halcon's experience of breaking away from Halcon environment and various error reporting solutions
Haute performance et faible puissance Cortex - A53 Core Board | i.mx8m mini
Eight steps of agile development process