当前位置:网站首页>Px4 autonomous flight
Px4 autonomous flight
2022-07-07 22:16:00 【r1ch4rd】
**
PX4 Autonomous Flight
**
1、 stay runway takeoff in RWTO_TKOFF( Use landing gear take off ) Set to enabled

2、land: FW_LND_AIRSPD_SC Landing airspeed scale factor
FW_LND_ANG Landing angle
FW_LND_FLALT It is related to the landing height

3、MIS_TAKEOFF_ALT 0-80 Take off to the minimum altitude
NAV_ACC_RAD 0.1-100 Arrival waypoint radius


4、 Set waypoint attention : home Point away takeoff Point distance 、 Direction ; The setting of the last waypoint is the same as landing Something about , Pay attention to the orientation . 
After setting parameters and planning routes , Simulate the flight according to the simulation process .
边栏推荐
- TCP/IP 协议栈
- Tsconfig of typescript TS basics JSON configuration options
- Virtual machine network configuration in VMWare
- 【Azure微服务 Service Fabric 】因证书过期导致Service Fabric集群挂掉(升级无法完成,节点不可用)
- Index summary (assault version)
- Jerry's about TWS channel configuration [chapter]
- Wechat official account oauth2.0 authorizes login and displays user information
- The function is really powerful!
- PDF文档签名指南
- Node:504 error reporting
猜你喜欢

Where is the big data open source project, one-stop fully automated full life cycle operation and maintenance steward Chengying (background)?
Cv2.resize function reports an error: error: (-215:assertion failed) func= 0 in function ‘cv::hal::resize‘
Record a garbled code during servlet learning
Tcp/ip protocol stack
How does win11 unblock the keyboard? Method of unlocking keyboard in win11
建立自己的网站(18)
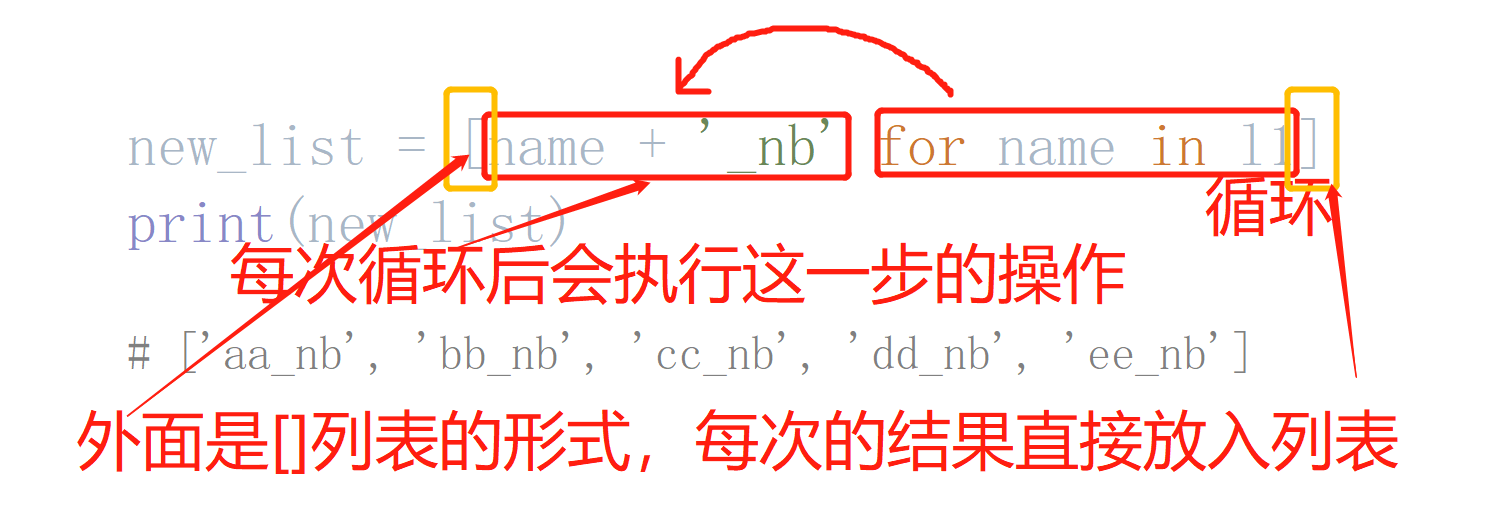
Ternary expressions, generative expressions, anonymous functions
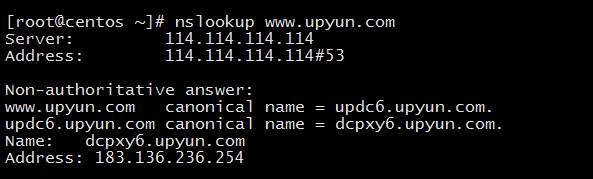
DNS series (I): why does the updated DNS record not take effect?
![[azure microservice service fabric] the service fabric cluster hangs up because the certificate expires (the upgrade cannot be completed, and the node is unavailable)](/img/35/1bb21c100980eb1075dbbcb922e181.png)
[azure microservice service fabric] the service fabric cluster hangs up because the certificate expires (the upgrade cannot be completed, and the node is unavailable)
![Jerry's test box configuration channel [chapter]](/img/d4/fb67f5ee0fe413c22e4e5cd5037938.png)
Jerry's test box configuration channel [chapter]
随机推荐
Customer case | China law network, through observing the cloud, greatly shortens the time of fault location
The cyberspace office announced the measures for data exit security assessment, which will come into force on September 1
怎样写一个增广矩阵到txt文件中
Jerry's key to initiate pairing [chapter]
QT compile IOT management platform 39 alarm linkage
Jerry's test box configuration channel [chapter]
Validutil, "Rethinking the setting of semi supervised learning on graphs"
解决uni-app中uni.request发送POST请求没有反应。
Reinforcement learning - learning notes 9 | multi step TD target
Build your own website (18)
Win11时间怎么显示星期几?Win11怎么显示今天周几?
【JDBC Part 1】概述、获取连接、CRUD
Crawler (17) - Interview (2) | crawler interview question bank
NVR硬盘录像机通过国标GB28181协议接入EasyCVR,设备通道信息不显示是什么原因?
Overseas agent recommendation
Which financial products will yield high returns in 2022?
Tsconfig of typescript TS basics JSON configuration options
SAR影像质量评估
Interview question 01.02 Determine whether it is character rearrangement - auxiliary array algorithm
Ant destination multiple selection