当前位置:网站首页>单片机原理与接口技术(ESP8266/ESP32)机器人类草稿
单片机原理与接口技术(ESP8266/ESP32)机器人类草稿
2022-07-05 09:33:00 【zhangrelay】
如下为草稿,谬误多多,仅供参考,终稿未定。

机器人类
单片机(机器人方向)原理与接口技术
Single-chip microcomputer principle and interface technology
课程编号 | 学分 | 3 | 开课学期 | 5 | |||||||||
学时 | 讲课:40学时 实验:8 学时 实践:0学时 | ||||||||||||
课程类型 | 专业必修课程 | 课程性质 | 必修 | 考核形式 | 考试 | ||||||||
先修课程 | 《控制器编程基础》、《电路》、《模拟电子技术》、《数字电路与FPGA设计》 | ||||||||||||
适用专业 | 机器人工程 | 开课学院 | |||||||||||
建议教材 | |||||||||||||
主要参考书 | |||||||||||||
制定人 | 审定人 | 批准人 | |||||||||||
修订时期 | 版本 | ||||||||||||
一、课程说明
《单片机(机器人方向)原理与接口技术》课程是机器人工程专业的专业必修课程,在第五学期开设。通过对该课程的学习,学生对单片机(机器人方向)等微控制器的编程和应用有一定的认识,能够提高基于单片机(机器人方向)技术的硬件、软件开发设计的能力,提高分析问题解决问题的能力,为后续学习高级单片机(机器人方向)打下基础,也为将来从事自动化测试系统设计、智能仪器仪表的设计等奠定坚实的基础。本课程注重方法论,不仅讲解基础知识点和基本原理,更注重引导学生触类旁通,举一反三,同时强调编程的思想的形成,比如“搭积木”设计的思想、有限状态机编程的思想等。
二、课程目标
1.能够充分理解系统硬件和软件集成在系统设计中的重要性,能对机器人控制系统中的各部分进行分析和对比,确定系统各部分的软硬件集成方案。(对应毕业要求1.2:理解系统集成的概念,能够确定系统的边界,识别系统的各个组成部分,包括工业机器人、机器人周边设备、机器视觉单元、夹具等机械部件、电气控制、传感器、工业控制网络与通讯等,能够对比分析和确定各部分的集成方案。)
2.能够针对基于单片机(机器人方向)的机器人控制系统,运用单片机(机器人方向)的原理及相关专业知识,将其分解为信号采集、控制、通信等子模块,能对各个模块工作原理。(对应毕业要求2.2:能够运用科学原理和数学模型的方法,将复杂系统分解,实现模块化表达,并对工业机器人为主导的先进生产线系统的单元和部件的结构、原理进行分析。)
3.针对控制系统要求,分析单元电路,对单元电路中的元器件参数进行计算,利用分析结果设计单元电路,完成相应的功能软件设计。(对应毕业要求3.3:能够针对特定需求,通过建模仿真工具进行元器件选型、工艺需求分析和功能分析,完成单元或子系统的硬件电路和软件模块设计。)
三、教学内容及基本要求
(一)迈进单片机(机器人方向)的大门
1.课程教学内容
(1)单片机(机器人方向)概述;
(2)ESP系列单片机(机器人方向)和ESP8266/ESP32编程基础。
2.课程重点、难点
重点:ESP8266/ESP32基础知识、课程需掌握的核心内容;
难点:ESP8266/ESP32中常用的头文件、变量的存储类型、单片机(机器人方向)的引脚功能。
3.课程教学要求
了解本课程的性质、研究对象与方法、任务。掌握课程使用的工具软件的基本使用方法,掌握ESP8266/ESP32变量类型,熟悉单片机(机器人方向)引脚的功能。
4.课程教学方式
整合思维研究、探究式学习。
(二)ESP系列单片机(机器人方向)I/O口简单应用
1.课程教学内容
(1)单片机(机器人方向)最小应用系统;
(2)闪烁灯的制作;
(3)广告灯的制作。
2.课程重点、难点
重点:单片机(机器人方向)最小系统、ESP8266/ESP32编程的基本方法和对I/O口的操作方法;
难点:硬件原理图读图、程序设计的思路和方法、对I/O口的基本操作。
3.课程教学要求
能根据硬件编写简单I/O口操作程序,掌握不同的编程方法,灵活掌握对I/O口的操作,掌握ESP8266/ESP32程序的基本结构。
4.课程教学方式
探究式学习、基于问题的教学。
(三)基本功—ESP系列系列单片机(机器人方向)硬件
1.课程教学内容
(1)ESP系列单片机(机器人方向)总体结构;
(2)ESP系列单片机(机器人方向)的CPU;
(3)ESP系列单片机(机器人方向)的存储器;
(4)单片机(机器人方向)的并行输入/输出端口。
2.课程重点、难点
重点:单片机(机器人方向)的结构、单片机(机器人方向)的时钟信号、单片机(机器人方向)的存储器组织、单片机(机器人方向)的I/O口;
难点:特殊功能寄存器、I/O口的结构、工作原理和带负载能力。
3.课程教学要求
熟悉单片机(机器人方向)的结构和时钟信号,深入理解单片机(机器人方向)的存储器和I/O口的工作原理及操作方法。
4.课程教学方式
整合思维研究、探究式学习。
(四)基本功—ESP8266/ESP32编程基础
1.课程教学内容
(1)ESP8266/ESP32语言的数据;
(2)ESP8266/ESP32语言对单片机(机器人方向)主要资源的控制;
(3)ESP8266/ESP32语言的基本运算与流程控制语句;
(4)ESP8266/ESP32语言的数组与函数;
(5)ESP8266/ESP32语言的预处理命令及汇编语句的嵌入;
(6)单片机(机器人方向)ESP8266/ESP32编程规范。
2.课程重点、难点
重点:ESP8266/ESP32的数据存储类型、ESP8266/ESP32对单片机(机器人方向)资源的控制、函数和中断函数的区别、ESP8266/ESP32的预处理命令、ESP8266/ESP32编程规范;
难点:数据存储类型和ESP系列单片机(机器人方向)的存储关系、对特殊功能寄存器的操作方法。
3.课程教学要求
熟练掌握ESP8266/ESP32的存储类型的C语言表达,特殊功能寄存器的操作方法;掌握ESP8266/ESP32编程规范;熟练掌握C语言编程的基本运算与流程控制方法。
4.课程教学方式
整合思维研究、探究式学习。
(五)ESP系列单片机(机器人方向)中断系统
1.课程教学内容
(1)中断系统结构与中断控制;
(2)中断优先级与中断函数;
(3)外部中断源的ESP8266/ESP32编程。
2.课程重点、难点
重点:中断的产生与中断优先级、外部中断编程;
难点:中断相关寄存器的配置方法,中断标志位的产生与清除。
3.课程教学要求
熟练掌握中断控制寄存器的配置方法,熟练掌握包含优先级的外部中断的初始化与编程方法。
4.课程教学方式
探究式学习、基于问题的教学。
(六)定时器与数码管显示
1.课程教学内容
(1)ESP系列单片机(机器人方向)的定时器/计数器基本知识;
(2)定时器/计数器工作方式;
(3)定时器/计数器的应用;
(4)数码管的显示原理及实现。
2.课程重点、难点
重点:定时计数器方式1和2的工作过程、相关寄存器的配置方法、定时计数器编程、数码管动态显示;
难点:定时计数器工作方式选择、初值计算与寄存器配置、动态显示的原理和编程。
3.课程教学要求
熟练掌握定时计数器的各工作方式的特点和编程方法,熟练掌握动态显示的编程方法。
4.课程教学方式
探究式学习、基于问题的教学。
(七)键盘与LCD显示
1.课程教学内容
(1)立式键盘检测原理及实现;
(2)矩阵式键盘检测原理及实现;
(3)LCD1602显示原理及实现。
2.课程重点、难点
重点:按键检测原理、键盘消抖、LCD1602与单片机(机器人方向)的接口电路设计及编程方法;
难点:利用定时器进行软件消抖的编程方法、LCD1602的时序与读写操作。
3.课程教学要求
熟练掌握键盘的编程与软件消抖方法,熟练掌握LCD1602的编程方法,可根据功能要求,对程序能灵活移植。
4. 课程教学方式
探究式学习、基于问题的教学。
(八)UART串行口通信
1.课程教学内容
(1)串行通信初步认识;
(2)ESP系列单片机(机器人方向)UART模块介绍;
(3)串行口的应用。
2.课程重点、难点
重点:串行通信的各工作方式与相关寄存器的配置、串行通信的编程方法;
难点:串行通信的工作方式、串行通信的过程与编程。
3.课程教学要求
熟练掌握串行通信的初始化与各工作方式下的编程方法。
4.课程教学方式
探究式学习、基于问题的教学。
(九)I2C总线接口设计
1.课程教学内容
(1)I2C总线概述;
(2)单片机(机器人方向)与EEPROM编程实例。
2.课程重点、难点
重点:I2C总线通信协议、时序与读写操作,EEPROM与单片机(机器人方向)的接口电路设计及时序与读写操作;
难点:I2C的初始化与读写操作,对EEPROM的读写操作。
3.课程教学要求
熟练I2C和EEPROM的编程方法,可根据功能要求,对程序能灵活移植。
4.课程教学方式
探究式学习、基于问题的教学。
(十)模数与数模转换
1.课程教学内容
(1)A/D和D/A接口概述;
(2)PCF8591的硬件接口;
(3)PCF8591A/D转换原理与实战;
(4)PCF8591芯片D/A转换原理与实战。
2.课程重点、难点
重点:PCF8591的接口电路、时序转换过程,PCF8591编程方法;
难点:PCF8591的初始化及编程方法。
3.课程教学要求
熟练I2C和EEPROM的的编程方法,可根据功能要求,对程序能灵活移植。
4.课程教学方式
探究式学习、基于问题的教学。
(十)综合设计
1.课程教学内容
(1)系统性能及要求分析;
(2)整体方案设计;
(3)单元电路硬件设计;
(4)软件设计;
(5)调试及运行。
2.课程重点、难点
重点:单元电路硬件原理分析、单元模块软件设计;
难点:系统化设计思维,系统分布调试。
3.课程教学要求
根据系统功能要求,选择合理设计方案,完成软硬件电路设计及系统调试。
4.课程教学方式
整合思维研究、探究式学习、融合学习、基于问题的教学。
四、课程学时分配
《单片机(机器人方向)原理与接口技术》根据教学计划规定的学时数,理论课40学时,实验8学时,具体学时分配如下表。
课程学时分配表
教学内容概要 | 学时 | 教学方式 | 对应课程目标 | ||
讲课 | 实验 | 实践 | |||
1.迈进单片机(机器人方向)的大门 | 3 | 整合思维研究、探究式学习 | 2 | ||
2.ESP系列单片机(机器人方向)I/O口简单应用 | 3 | 探究式学习、基于问题的教学 | 2、3 | ||
3.基本功—ESP系列系列单片机(机器人方向)硬件 | 3 | 整合思维研究、探究式学习 | 2、3 | ||
4.基本功—ESP8266/ESP32编程基础
| 2 | 整合思维研究、探究式学习 | 2/3 | ||
5.ESP系列单片机(机器人方向)中断系统
| 4 | 探究式学习、基于问题的教学 | 2、3 | ||
实验1:外部中断实验 | 2 | 实操 | 1、2、3 | ||
6.定时器与数码管显示
| 4 | 探究式学习、项目驱动教学 | 2、3 | ||
6.定时器与数码管显示
| 3 | 探究式学习、基于问题的教学 | 2、3 | ||
实验:2:定时器/计数器实验 | 2 | 实操 | 1、2、3 | ||
7.键盘与LCD显示
| 4 | 探究式学习、基于问题的教学 | 2、3 | ||
7.键盘与LCD显示
| 2 | 探究式学习、基于问题的教学 | 2、3 | ||
实验3:键盘与LCD实验 | 2 | 实操 | 1、2、3 | ||
8.UART串行口通信
| 4 | 探究式学习、基于问题的教学 | 1、2、3 | ||
实验:4:串行口通信实验 | 2 | 实操 | 1、2、3 | ||
9.I2C总线接口设计
| 4 | 探究式学习、基于问题的教学 | 1、2、3 | ||
10.模数与数模转换
| 4 | 探究式学习、基于问题的教学 | 1、2、3 | ||
合 计 | 40 | 8 | |||
五、其他教学环节
1. 实验项目与内容
实验项目与内容一览表
序号 | 实验项目名称 | 内容提要 | 实验学时 | 每组人数 | 实验类型 | 实验类别 | 实验要求 |
1 | 实验一、外部中断实验 | 编程实现:当KEY0按下,外部中断0请求中断,控制发光二极管从上到下循环点亮3圈;当KEY1按下,外部中断1请求中断,控制发光二极管闪烁3次。(要求外部中断1优先级高于外部中断0,即KEY1按下后能够打断流水灯的动作,当外中断1处理完后,恢复外中断0的处理,并且能从上次打断的那个LED开始循环)。 | 2 | 1 | 基础型 | 专业基础 | 必做 |
2 | 实验二、定时器/计数器实验 | 实现19秒倒计时功能,初始状态数码管最后两位显示数字“19”,要求定时器0每10ms产生一次中断,在定时中断服务程序里进行计数,计数满一秒,数码管显示相应减1,倒计时结束时,数码管显示“00”,并以周期1秒进行闪烁 | 2 | 1 | 基础型 | 专业基础 | 必做 |
3 | 实验三、键盘与LCD实验 | 对4×4矩阵式键盘电路的键值进行编码,编程实现在LCD液晶显示器上显示每个按键的ASCII码。 | 2 | 1 | 设计型 | 专业基础 | 必做 |
4 | 实验四、串行口通信实验 | 实现以下功能:串口调试助手向单片机(机器人方向)发送控制码,单片机(机器人方向)向PC回送控制码,0:熄灭;1:LED从上往下循环;2:LED从下往上循环;3:LED闪烁;4:蜂鸣器响 | 2 | 1 | 设计型 | 专业基础 | 必做 |
2.说明
本课程具有较强的实践性,实验项目是课程教学的必要环节。本课程实验的目的是提高学生分析和解决简单问题的能力,培养实事求是、严谨的科学作风和良好的实验习惯,为从事单片机(机器人方向)控制系统的分析设计奠定基础。通过实验学生达到的能力如下:
(1)能够认识到对于相同的实验要求,可由不同的方案实现,能够通过查找文献资料,寻求可替代的解决方案。
(2)通过设计型实验,能够基于单片机(机器人方向)的原理并采用科学方法、专业理论对给定的实验要求进行分析,利用单片机(机器人方向)微型机器人设计实验方案。
(3)能够使用Arduino、串口调试助手等工具软件进行软件设计和系统调试。
六、教学管理
1.在开学第一周内,把单片机(机器人方向)微型机器人发放到学生手中,每2人一套,要求自行安装编程软件、驱动、下载软件和调试工具。
2.学生需要在微型机器人完成所有的作业。
3.在实验上课之前,要求学生在微型机器人上已经完成实验的基础部分。教师在实验课上主要完成对学生实验成果的验收和实验提高部分任务的布置,教师更多的时间应用于和学生在实验中出现问题的讨论以及引导学生分析问题和解决问题。
七、考核方法
1、考核说明
课程考核采用“N+1”考核方式。“N”为学分数,由平时作业、期中考试和实验组成,“1”为期末考试。
本课程的学生成绩由平时成绩、实验成绩、期中考试成绩和期末考试成绩四部分组成,其中平时成绩占总成绩的20%,实验成绩占总成绩的30%、期中考试成绩占总成绩的10%,期末考试成绩占总成绩的40%。平时成绩由平时作业(占总成绩的20%)评定。具体考核环节和考核比例见下表。
考核环节 | 平时成绩(20%) | 期中考核 (10%) | 实验成绩 (30%) | 期末考核 (40%) | 合计 |
平时作业 | |||||
考核比例 | 20% | 10% | 30% | 40% | 100% |
平时作业评分标准
考核内容 | 优(90-100) | 良(80-89) | 中(70-79) | 及格(60-69) | 不及格(<60) |
知识及概念掌握程度(权重30%) | 知识及概念掌握全面,运用得当 | 知识及概念掌握较全面,能正确运用 | 知识及概念掌握较全面,能够运用,但没有考虑约束条件 | 知识及概念掌握程度一般,并不能正确运用 | 没有掌握知识及概念,不会运用公式 |
解题过程的正确性、完整性(70%) | 解题过程正确、完整,逻辑性强,答案正确率超过90%,书写清晰 | 解题过程较正确、完整,逻辑性较强,答案正确率超过80%,书写清晰 | 解题过程基本正确、完整,答案正确率超过70% | 解题过程中存在错误,答案正确率超过60% | 解题过程错误且不完整,答案正确率低于60% |
(1)期中考试试题、期末考试试题需要任课教师按照实际教学情况制定相应的试题参考答案及评分标准并作为本课程的考核材料存档。
(2)实验考核方式:按照实验操作(60%)、实验报告(40%),以百分制计算每个实验项目成绩,单项实验成绩考核标准如下表所示,四个实验项目成绩的平均值作为本课程的实验成绩。
单项实验成绩考核标准
考核实验操作评分表 | 实验报告评分标准 | ||
操作表现 | 等级(分) | 报告内容 | 得分 |
在规定时间的2/3时间内完成操作,达到实验要求;设备整理到位,环境整洁。 | A(90-100) | 1.报告主要内容(满分80分) | ①实验要求未完全达到扣40分;缺少原理图或流程图扣10分 ②图表不规范,或字迹不清楚,扣10分; ③程序结构不简洁,扣5分; ④缺少程序清单,或缺少实验结果记录,经提示后补齐,扣10分; |
在规定时间内完成,最多经一次个别指导完成操作,设备整理到位,环境整洁。 | B(80-89) | 2. 思考分析(满分20分) | ①无思考分析,扣20分; ②主要内容分析不到位,扣15分; ③主要内容分析正确,但不全面,扣10分; ④字迹潦草扣5分; |
在规定时间内完成,经多次个别指导完成操作,设备整理到位,环境整洁。 | C(70-79) | 实验报告合计得分 | ①报告主要内容项得分与思考分析项得分之和,为实验报告合计得分; ②无实验数据记录,或实验数据作假,实验报告合计得分为零分。 |
在规定时间内完成,经多次个别指导完成操作,设备和环境整理不到位。 | D(60-69) | ||
在规定时间内未完成操作。 | E(<60) | ||
2、课程目标考核方案一览表
考核说明:《课程目标考核方案一览表》表达的对应关系,能够证明学生通过本课程考核成绩合格,即可达到课程目标的要求。
课程目标考核方案一览表
课程支撑的毕业要求序号 | 课程目标序号 | 考核内容 | 考核形式 | 考核原始材料(说明:试卷、作业、实验报告、技术报告、过程记录、实习总结等,纸质或电子) |
1.2 | 课程目标1 | 对比分析和确定各部分的集成方案。 | 平时作业、 实验评估 | 平时作业(纸质) 实验报告(纸质) |
2.2 | 课程目标2 | 单元模块结构和原理分析。 | 期中考试、 期末考试 | 试卷(纸质) 试卷(纸质) |
3.3 | 课程目标3 | 单元电路分析、软硬件设计 | 平时作业、 实验评估 | 平时作业(纸质) 实验报告(纸质) |
边栏推荐
- 【阅读笔记】图对比学习 GNN+CL
- C language - input array two-dimensional array a from the keyboard, and put 3 in a × 5. The elements in the third column of the matrix are moved to the left to the 0 column, and the element rows in ea
- OpenGL - Model Loading
- How to empty uploaded attachments with components encapsulated by El upload
- La voie de l'évolution du système intelligent d'inspection et d'ordonnancement des petites procédures de Baidu
- 代码语言的魅力
- Oracle combines multiple rows of data into one row of data
- Understanding of smt32h7 series DMA and DMAMUX
- tongweb设置gzip
- 测试老鸟浅谈unittest和pytest的区别
猜你喜欢

Go 语言使用 MySQL 的常见故障分析和应对方法
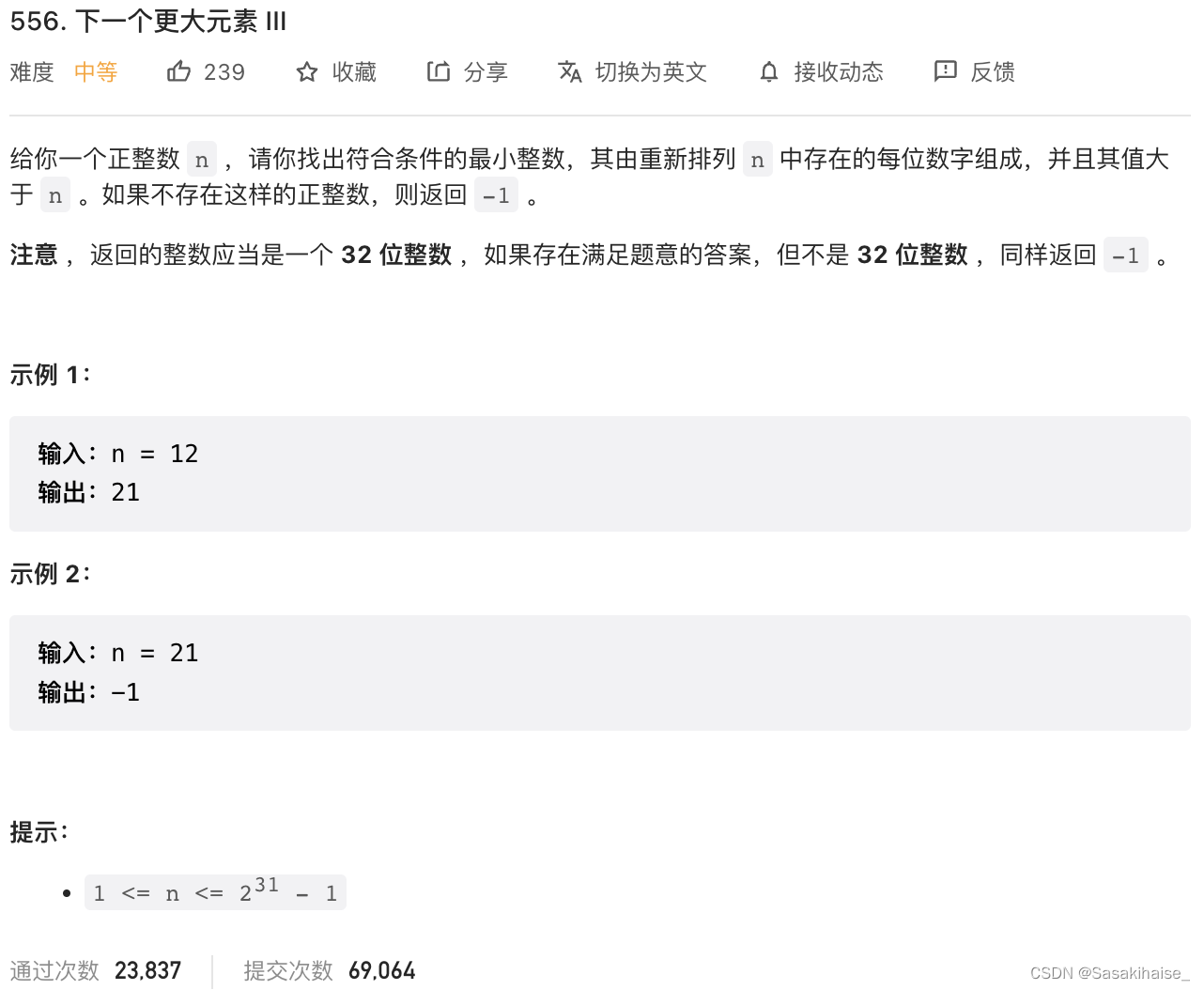
LeetCode 556. Next bigger element III

C language - input array two-dimensional array a from the keyboard, and put 3 in a × 5. The elements in the third column of the matrix are moved to the left to the 0 column, and the element rows in ea
How to empty uploaded attachments with components encapsulated by El upload

顶会论文看图对比学习(GNN+CL)研究趋势

7 月 2 日邀你来TD Hero 线上发布会
SQL learning - case when then else
![[reading notes] Figure comparative learning gnn+cl](/img/44/2e13d63ef654663852cbccb342b838.png)
[reading notes] Figure comparative learning gnn+cl
How to improve the operation efficiency of intra city distribution
Nips2021 | new SOTA for node classification beyond graphcl, gnn+ comparative learning
随机推荐
LeetCode 503. 下一个更大元素 II
搞数据库是不是越老越吃香?
The popularity of B2B2C continues to rise. What are the benefits of enterprises doing multi-user mall system?
Are databases more popular as they get older?
Why do offline stores need cashier software?
SMT32H7系列DMA和DMAMUX的一点理解
The research trend of map based comparative learning (gnn+cl) in the top paper
TDengine可通过数据同步工具 DataX读写
The writing speed is increased by dozens of times, and the application of tdengine in tostar intelligent factory solution
First understanding of structure
【两个对象合并成一个对象】
正式上架!TDengine 插件入驻 Grafana 官网
[two objects merged into one object]
From "chemist" to developer, from Oracle to tdengine, two important choices in my life
Idea debugs com intellij. rt.debugger. agent. Captureagent, which makes debugging impossible
How do enterprises choose the appropriate three-level distribution system?
Thermometer based on STM32 single chip microcomputer (with face detection)
Kotlin introductory notes (VIII) collection and traversal
【对象数组a与对象数组b取出id不同元素赋值给新的数组】
从“化学家”到开发者,从甲骨文到 TDengine,我人生的两次重要抉择