当前位置:网站首页>Unity SKFramework框架(二十三)、MiniMap 小地图工具
Unity SKFramework框架(二十三)、MiniMap 小地图工具
2022-07-05 09:20:00 【CoderZ1010】
目录
简介
MiniMap可以帮助我们快速实现小地图功能,该工具已经上传至我的开发框架SKFramework中的Package Manager开发工具包管理器中,如图所示,点击右下角Install按钮即可下载安装。
SKFramework框架开源地址:
https://github.com/136512892/SKFramework
实现原理
1.以场景中的z轴正方向为上、以x轴正方向为右;
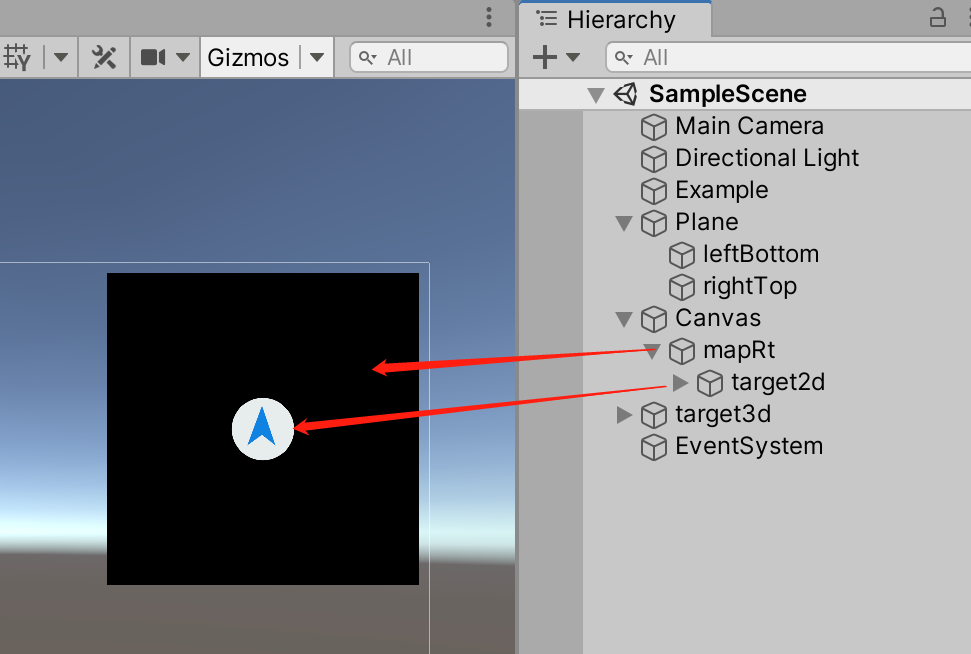
2.以场景中的左下角和右上角为两个基准点,分别记录为leftBottom、rightTop;
3.将场景中目标物体的Transform记录为target3d;
4.将界面中代表目标物体的Icon图标的RectTransform记录为target2d;
5.将小地图的RectTransform组件记录为mapRt;
6.用小地图的长度除以场景的长度得到水平方向上的比例;
(mapRt.rect.width / (rightTop.position.x - leftBottom.position.x))
7.用小地图的宽度除以场景的宽度得到垂直方向上的比例;
(mapRt.rect.height / (rightTop.position.z - leftBottom.position.z))
8.计算三维目标物体距左下角基点的长度和宽度,记录为horizontal、vertical;
(horizontal = target3d.position.x - leftBottom.position.x)
(vertical = target3d.position.z - leftBottom.position.z)
9.计算小地图中Icon图标距离左下角的长度和宽度,记录为x、y;
(x = horizontal * 水平方向上的比例)
(y = vertical * 垂直方向上的比例)
10.Icon图标将锚点设置为左下角,设置其位置。
(target2d.anchoredPosition = new Vector(x, y))
使用说明
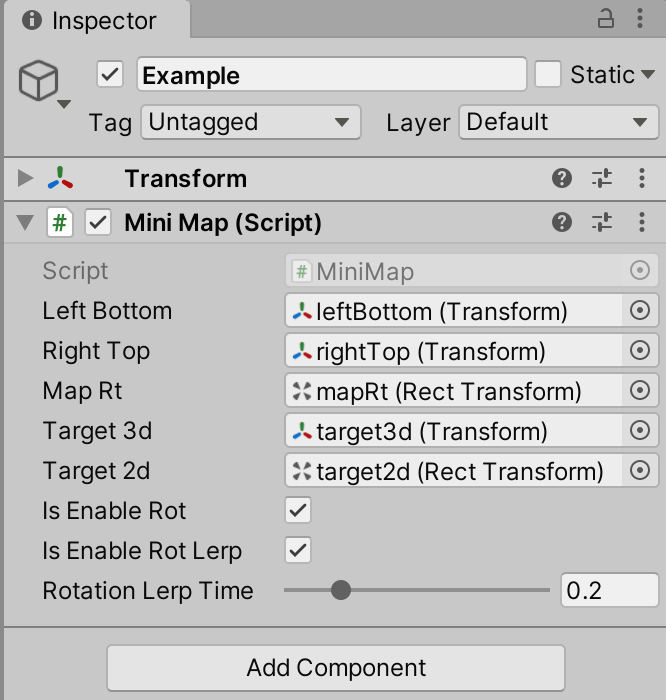
isEnableRot:Icon图标是否随三维目标的旋转而旋转
isEnableRotLerp:计算旋转值时是否使用插值运算
rotationLerpTime:插值到目标角度所需的时间

边栏推荐
- 云计算技术热点
- C form click event did not respond
- Talking about the difference between unittest and pytest
- Kotlin introductory notes (IV) circular statements (simple explanation of while, for)
- Summary of "reversal" problem in challenge Programming Competition
- Greendao reported an error in qigsaw, could not init daoconfig
- What is a firewall? Explanation of basic knowledge of firewall
- 一题多解,ASP.NET Core应用启动初始化的N种方案[上篇]
- Solution to the problems of the 17th Zhejiang University City College Program Design Competition (synchronized competition)
- 我的一生.
猜你喜欢

【组队 PK 赛】本周任务已开启 | 答题挑战,夯实商品详情知识

生成对抗网络
一次 Keepalived 高可用的事故,让我重学了一遍它

【ManageEngine】如何利用好OpManager的报表功能
【阅读笔记】图对比学习 GNN+CL
![Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]](/img/68/6bfa390b0bedcdbc4afba2f9bd9c0f.jpg)
Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
Composition of applet code

Kotlin introductory notes (V) classes and objects, inheritance, constructors
Add discount recharge and discount shadow ticket plug-ins to the resource realization applet

LeetCode 503. 下一个更大元素 II
随机推荐
Analysis of eventbus source code
阿里云发送短信验证码
牛顿迭代法(解非线性方程)
Nips2021 | new SOTA for node classification beyond graphcl, gnn+ comparative learning
Transfer learning and domain adaptation
图神经网络+对比学习,下一步去哪?
. Net service governance flow limiting middleware -fireflysoft RateLimit
Global configuration tabbar
Talking about label smoothing technology
Talking about the difference between unittest and pytest
L'information et l'entropie, tout ce que vous voulez savoir est ici.
520 diamond Championship 7-4 7-7 solution
Svg optimization by svgo
STM32简易多级菜单(数组查表法)
2311. Longest binary subsequence less than or equal to K
交通运输部、教育部:广泛开展水上交通安全宣传和防溺水安全提醒
云计算技术热点
[technical school] spatial accuracy of binocular stereo vision system: accurate quantitative analysis
Hi Fun Summer, play SQL planner with starrocks!
Rebuild my 3D world [open source] [serialization-2]