当前位置:网站首页>opencv学习笔记九--背景建模+光流估计
opencv学习笔记九--背景建模+光流估计
2022-07-06 07:30:00 【Cloudy_to_sunny】
opencv学习笔记九--背景建模+光流估计
背景建模
帧差法
由于场景中的目标在运动,目标的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧图像进行差分运算,不同帧对应的像素点相减,判断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。
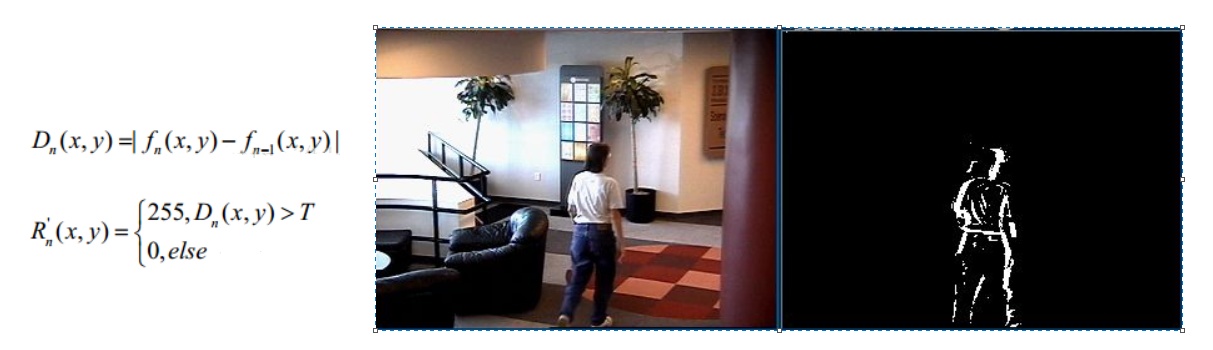
帧差法非常简单,但是会引入噪音和空洞问题
混合高斯模型
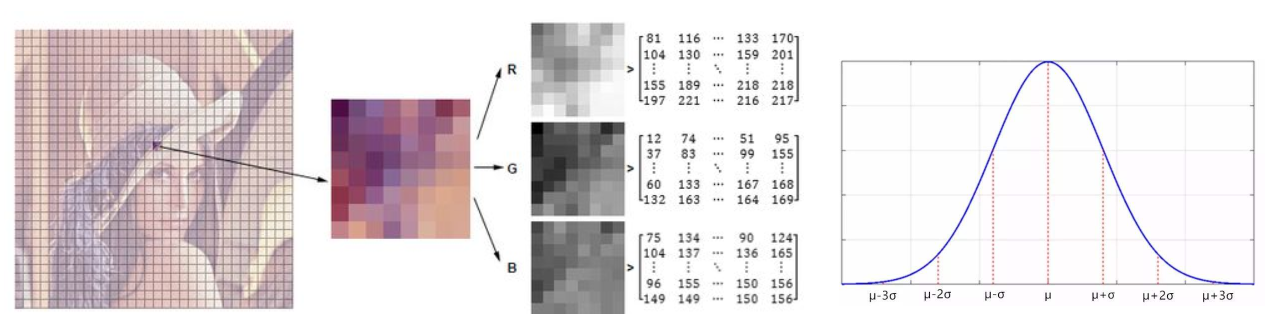
在进行前景检测前,先对背景进行训练,对图像中每个背景采用一个混合高斯模型进行模拟,每个背景的混合高斯的个数可以自适应。然后在测试阶段,对新来的像素进行GMM匹配,如果该像素值能够匹配其中一个高斯,则认为是背景,否则认为是前景。由于整个过程GMM模型在不断更新学习中,所以对动态背景有一定的鲁棒性。最后通过对一个有树枝摇摆的动态背景进行前景检测,取得了较好的效果。
在视频中对于像素点的变化情况应当是符合高斯分布
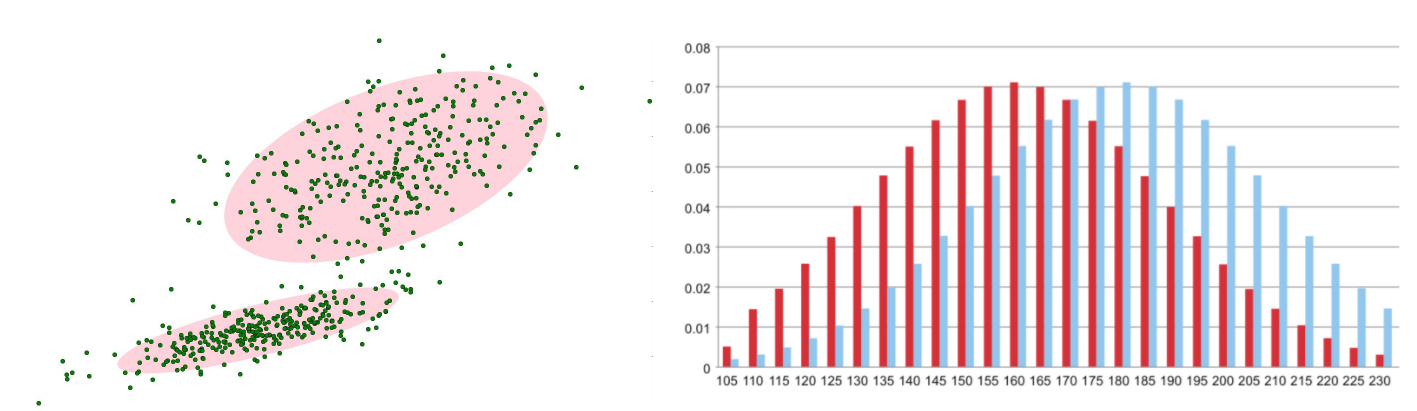
背景的实际分布应当是多个高斯分布混合在一起,每个高斯模型也可以带有权重
混合高斯模型学习方法
1.首先初始化每个高斯模型矩阵参数。
2.取视频中T帧数据图像用来训练高斯混合模型。来了第一个像素之后用它来当做第一个高斯分布。
3.当后面来的像素值时,与前面已有的高斯的均值比较,如果该像素点的值与其模型均值差在3倍的方差内,则属于该分布,并对其进行参数更新。
4.如果下一次来的像素不满足当前高斯分布,用它来创建一个新的高斯分布。
混合高斯模型测试方法
在测试阶段,对新来像素点的值与混合高斯模型中的每一个均值进行比较,如果其差值在2倍的方差之间的话,则认为是背景,否则认为是前景。将前景赋值为255,背景赋值为0。这样就形成了一副前景二值图。

import numpy as np
import cv2
#经典的测试视频
cap = cv2.VideoCapture('test.avi')
#形态学操作需要使用,用于去除噪音
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(3,3))
#创建混合高斯模型用于背景建模
fgbg = cv2.createBackgroundSubtractorMOG2()
while(True):
ret, frame = cap.read()
fgmask = fgbg.apply(frame)
#形态学开运算去噪点
fgmask = cv2.morphologyEx(fgmask, cv2.MORPH_OPEN, kernel)
#寻找视频中的轮廓
im, contours, hierarchy = cv2.findContours(fgmask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
#计算各轮廓的周长
perimeter = cv2.arcLength(c,True)
if perimeter > 188:
#找到一个直矩形(不会旋转)
x,y,w,h = cv2.boundingRect(c)
#画出这个矩形
cv2.rectangle(frame,(x,y),(x+w,y+h),(0,255,0),2)
cv2.imshow('frame',frame)
cv2.imshow('fgmask', fgmask)
k = cv2.waitKey(150) & 0xff
if k == 27:
break
cap.release()
cv2.destroyAllWindows()
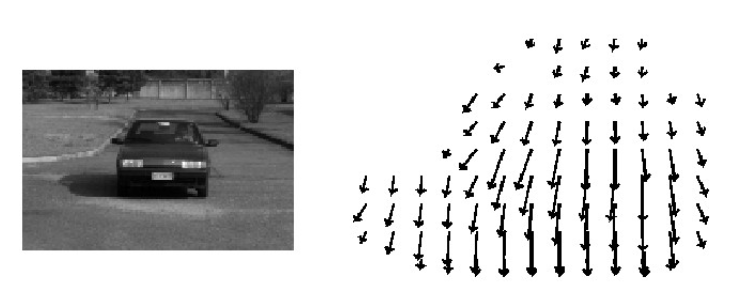
光流估计
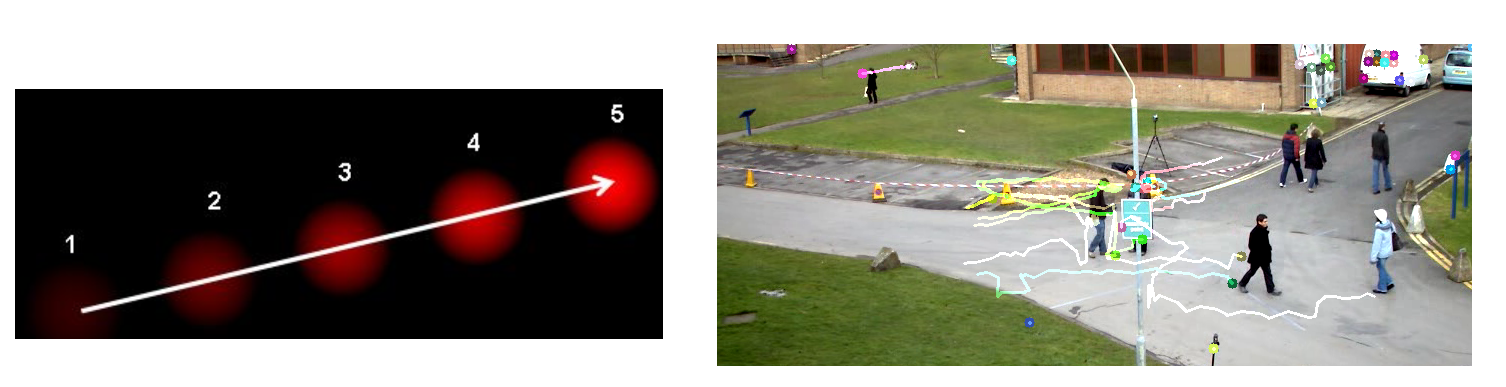
光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”,根据各个像素点的速度矢量特征,可以对图像进行动态分析,例如目标跟踪。
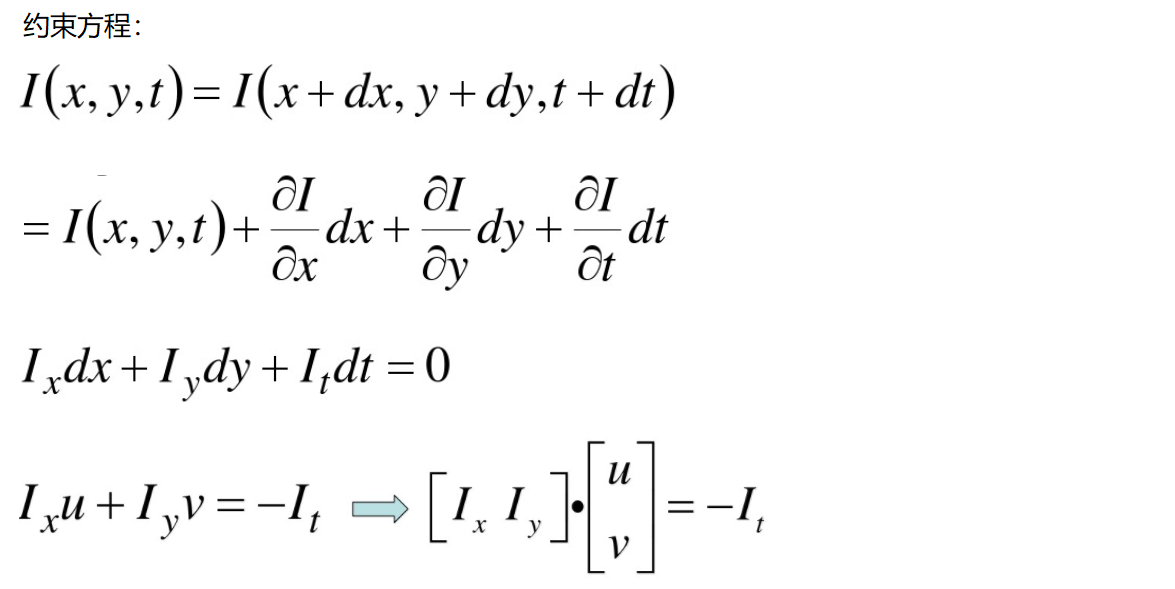
亮度恒定:同一点随着时间的变化,其亮度不会发生改变。
小运动:随着时间的变化不会引起位置的剧烈变化,只有小运动情况下才能用前后帧之间单位位置变化引起的灰度变化去近似灰度对位置的偏导数。
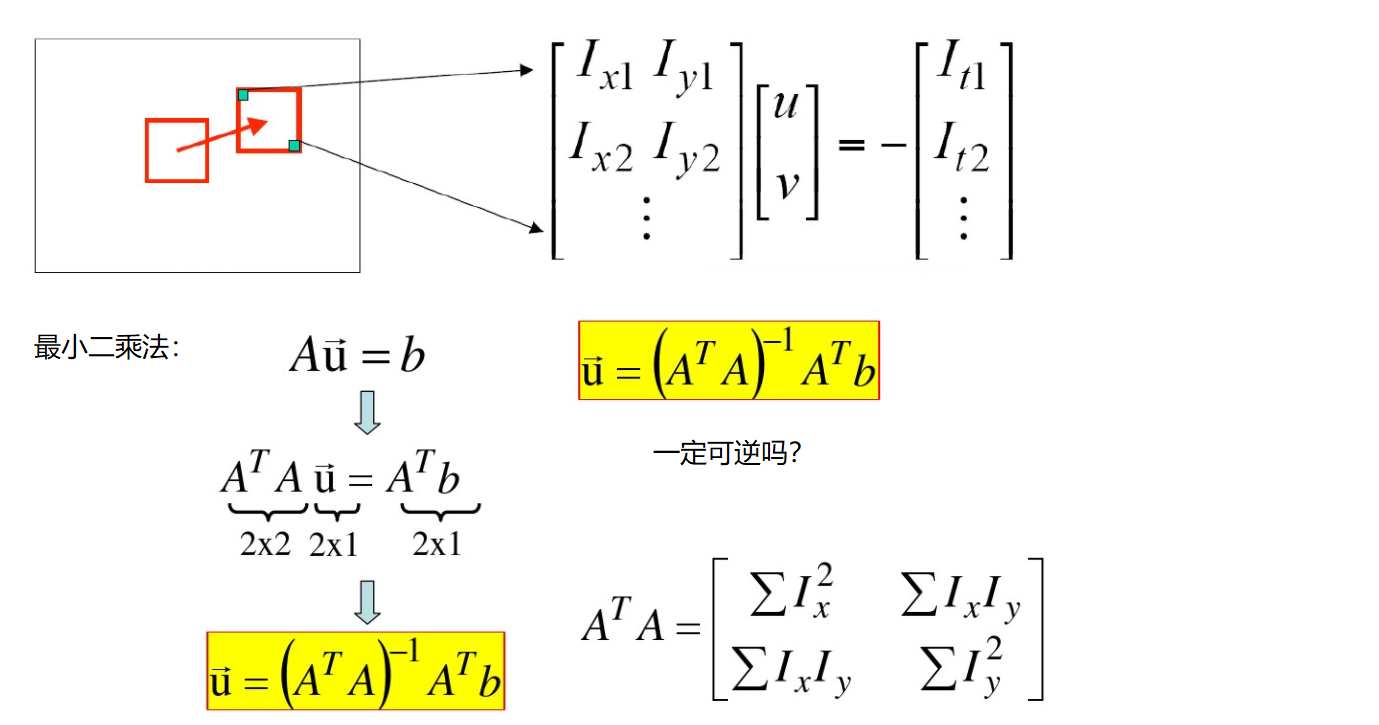
空间一致:一个场景上邻近的点投影到图像上也是邻近点,且邻近点速度一致。因为光流法基本方程约束只有一个,而要求x,y方向的速度,有两个未知变量。所以需要连立n多个方程求解。
Lucas-Kanade 算法
如何求解方程组呢?看起来一个像素点根本不够,在物体移动过程中还有哪些特性呢?(角点可逆,所以特征点使用角点)
cv2.calcOpticalFlowPyrLK():
参数:
prevImage 前一帧图像
nextImage 当前帧图像
prevPts 待跟踪的特征点向量
winSize 搜索窗口的大小
maxLevel 最大的金字塔层数
返回:
nextPts 输出跟踪特征点向量
status 特征点是否找到,找到的状态为1,未找到的状态为0
import numpy as np
import cv2
cap = cv2.VideoCapture('test.avi')
# 角点检测所需参数
feature_params = dict( maxCorners = 100,
qualityLevel = 0.3,
minDistance = 7)
# lucas kanade参数
lk_params = dict( winSize = (15,15),
maxLevel = 2)
# 随机颜色条
color = np.random.randint(0,255,(100,3))
# 拿到第一帧图像
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
# 返回所有检测特征点,需要输入图像,角点最大数量(效率),品质因子(特征值越大的越好,来筛选)
# 距离相当于这区间有比这个角点强的,就不要这个弱的了
p0 = cv2.goodFeaturesToTrack(old_gray, mask = None, **feature_params)
# 创建一个mask
mask = np.zeros_like(old_frame)
while(True):
ret,frame = cap.read()
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 需要传入前一帧和当前图像以及前一帧检测到的角点
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# st=1表示
good_new = p1[st==1]
good_old = p0[st==1]
# 绘制轨迹
for i,(new,old) in enumerate(zip(good_new,good_old)):
a,b = new.ravel()
c,d = old.ravel()
mask = cv2.line(mask, (a,b),(c,d), color[i].tolist(), 2)
frame = cv2.circle(frame,(a,b),5,color[i].tolist(),-1)
img = cv2.add(frame,mask)
cv2.imshow('frame',img)
k = cv2.waitKey(150) & 0xff
if k == 27:
break
# 更新
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1,1,2)
cv2.destroyAllWindows()
cap.release()

参考
边栏推荐
- 合规、高效,加快药企数字化转型,全新打造药企文档资源中心
- TS 体操 &(交叉运算) 和 接口的继承的区别
- OpenJudge NOI 2.1 1661:Bomb Game
- How Navicat imports MySQL scripts
- Méthode d'obtention des propriétés de l'objet JS (.Et [] méthodes)
- C # create database connection object SQLite database
- Google可能在春节后回归中国市场。
- Bugku CTF daily question: do you want seeds? Blackmailed
- [online problem processing] how to kill the corresponding process when the MySQL table deadlock is caused by the code
- 杰理之BLE【篇】
猜你喜欢
Oracle column to row -- a field is converted to multiple rows according to the specified separator

Go learning -- implementing generics based on reflection and empty interfaces
Significance and measures of encryption protection for intelligent terminal equipment

QT color is converted to string and uint

How are the open source Netease cloud music API projects implemented?
Apache middleware vulnerability recurrence
杰理之如若需要大包发送,需要手机端修改 MTU【篇】

SSM学习
Simulation of Teman green interferometer based on MATLAB
Basics of reptile - Scratch reptile
随机推荐
Ali's redis interview question is too difficult, isn't it? I was pressed on the ground and rubbed
【MySQL学习笔记32】mvcc
http缓存,强制缓存,协商缓存
【mysql学习笔记30】锁(非教程)
Emo diary 1
word中如何删除某符号前面或后面所有的文字
word中把带有某个符号的行全部选中,更改为标题
leecode-C语言实现-15. 三数之和------思路待改进版
How Navicat imports MySQL scripts
Introduction to the basics of network security
Markdown 中设置图片图注
杰理之蓝牙设备想要发送数据给手机,需要手机先打开 notify 通道【篇】
TS 类型体操 之 extends,Equal,Alike 使用场景和实现对比
Brief explanation of instagram operation tips in 2022
OpenJudge NOI 2.1 1661:Bomb Game
Word delete the contents in brackets
chrome查看页面fps
数字经济时代,如何保障安全?
How can word delete English only and keep Chinese or delete Chinese and keep English
If Jerry needs to send a large package, he needs to modify the MTU on the mobile terminal [article]