当前位置:网站首页>M2DGR 多源多场景 地面机器人SLAM数据集
M2DGR 多源多场景 地面机器人SLAM数据集
2022-07-05 07:07:00 【GRF-Sunomikp31】
M2DGR: 多源多场景 地面机器人SLAM数据集
Paper:https://arxiv.org/pdf/2112.13659.pdf
出处:ICRA2022 & RAL2021
项目地址:https://github.com/SJTU-ViSYS/M2DGR
主讲人:M2DGR一作上交硕士殷杰,导师邹丹平教授;
ICRA官方分享:https://www.bilibili.com/video/BV1q3411G7iF
Paper Literature Review:暂空缺;
Notes
大纲:
- 1.多源SLAM发展现状
- 2.主流SLAM数据集回顾
- 3.M2DGR采集平台与环境
- 4.实验评估与结果分析
- 5.数据集使用指南
1 多源SLAM发展现状
主要内容包括:视觉SLAM、激光SLAM、多源融合;
其中:多源融合的SLAM方法可以有效的提高SLAM的精度和鲁棒性,是目前最热门的领域之一;
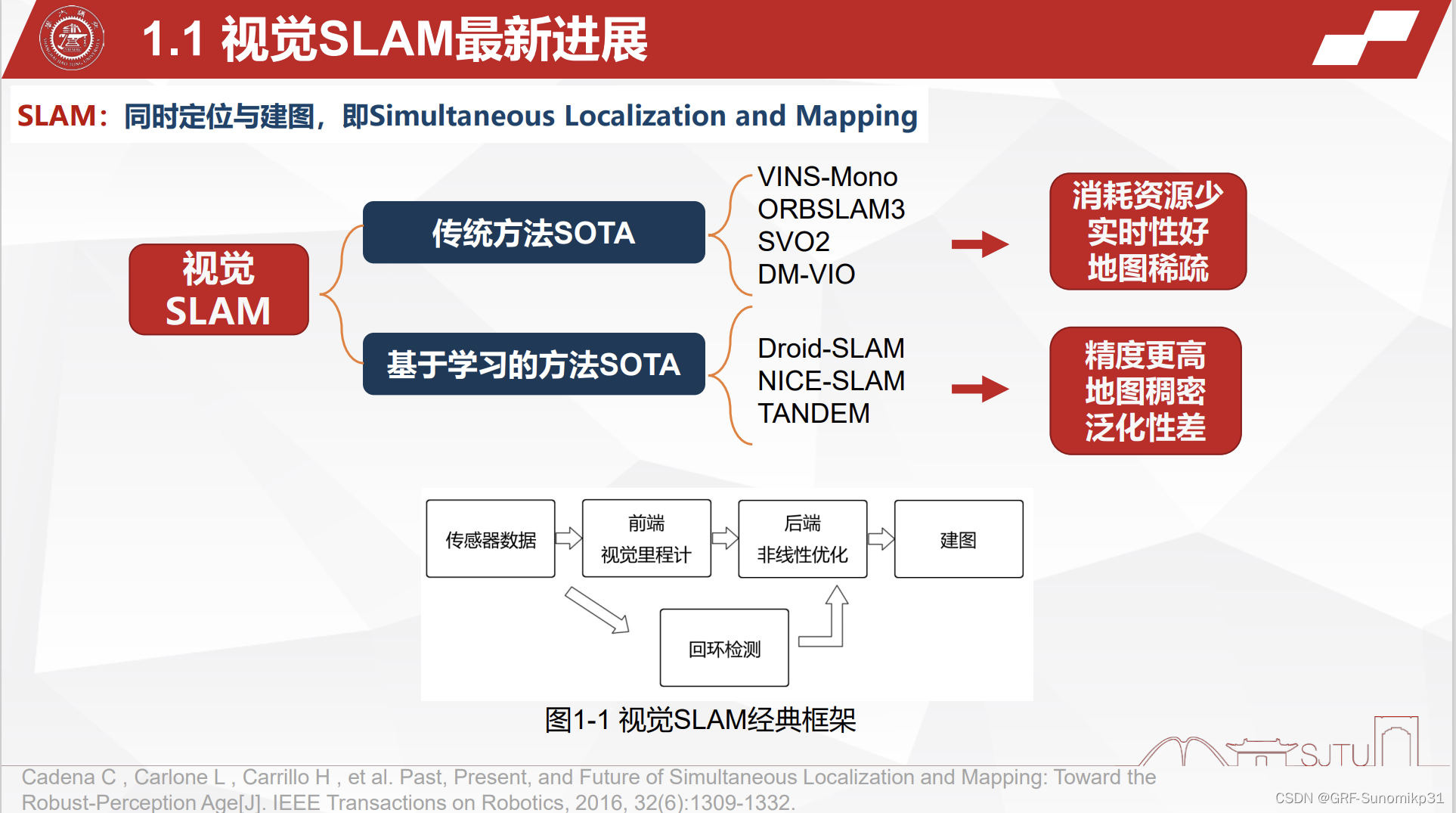
VSLAM主要分为以上四个模块;主要分为传统的方法和基于学习的方法;目前学术界会认为ORB-SLAM3的性能比VINS-Mono更好,这是在TUM-VI和EuRoC两个数据集上得出的结论,但是主讲人经过实验验证上发现:在小车以及真车上面,VINS-Mono性能会更稳定,也会更好一些,ORB-SLAM3在这样的平台上容易跟踪失败;如果是在小规模或者是由大量回环的情况下,ORB-SLAM3是可以达到分米级别,甚至是厘米级别的精度。SVO2相比与SVO,增加了多目的支持、后端优化以及回环检测,性能可以媲美ORB-SLAM3;DM-VIO是最新的一个工作。是一个延迟边缘化的系统,性能也可以媲美ORB-SLAM3;上面几个算法在不同数据集上各有优劣,都可以视为SOTA 算法;
基于学习的SLAM系统中,Droid-slam是所有SLAM中定位精度最高,其在TUM-RGBDI和EuRoC上的性能远超ORB-SLAM3,它在所有的序列上都能达到厘米级的精度,其缺点在于非常消耗计算资源,需要两块3090才能实时运行;NICE-SLAM是浙大的面向SLAM的动态神经隐式可缩放编码,神经隐式比较适合渲染稠密几何体(比如IMAP,但是Imap很难处理大型场景,NICE-SLAM可以处理大场景);TANDEM展现了不错的实时三维重建性能。
总结:传统方法消耗的资源比较少,但是构建的地图相对稀疏;基于学习的方法精度会更好,地图也很更加稠密,但是泛化能力差。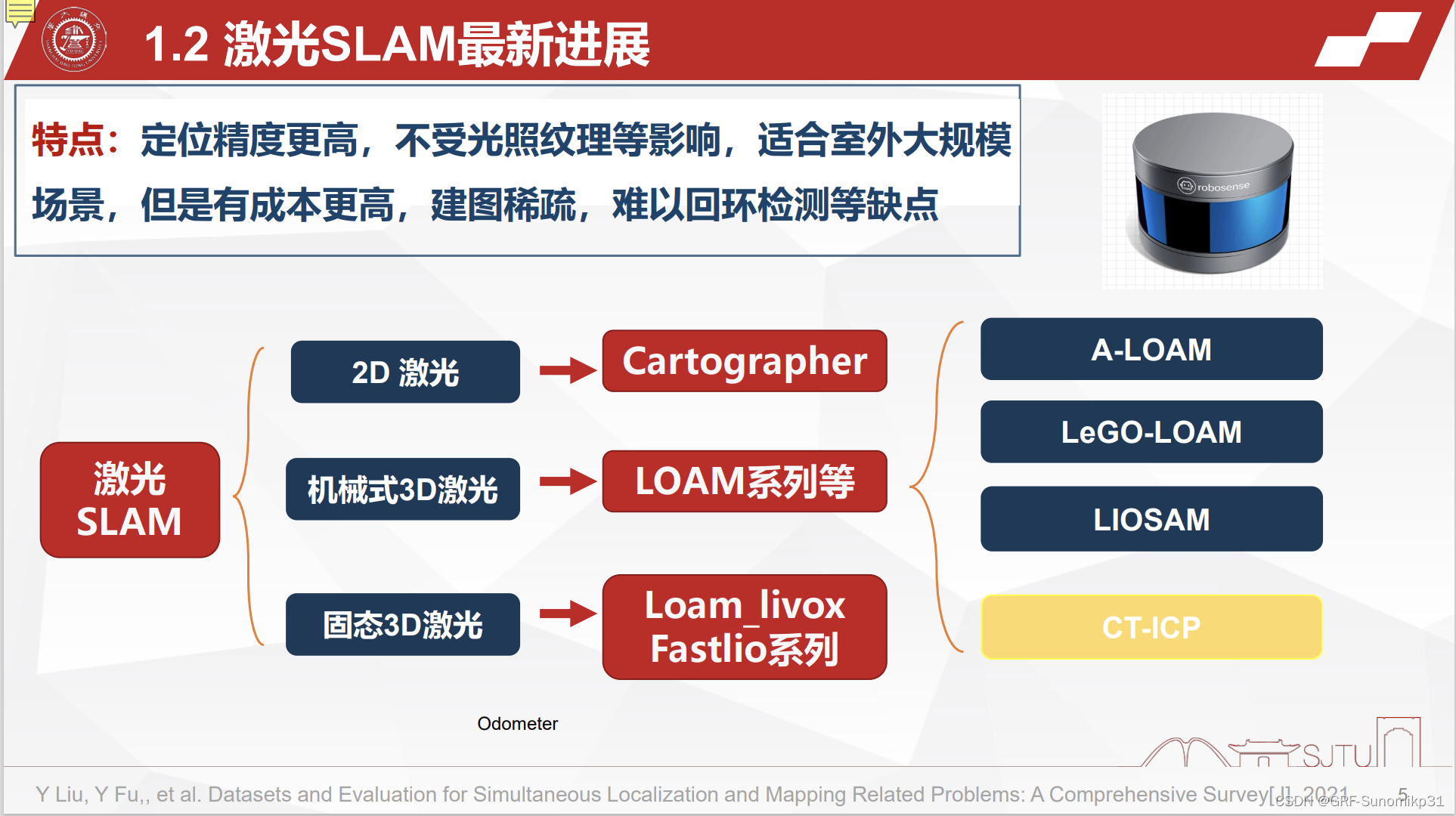
视觉SLAM对于光照和纹理信息比较敏感,但是激光SLAM是不受影响的;通常情况,激光SLAM在大场景下精度和鲁棒性比VSLAM更高;激光SLAM缺点在于,难于重定位(导致漂移)、构建地图稀疏、成本高;Cartographer在论文上测试精度可以达到5cm甚至3cm;机械式3D激光雷达可以360°旋转;固态3D激光雷达用的最多的是livox,但是固态3D激光雷达有一个固定的FOV;
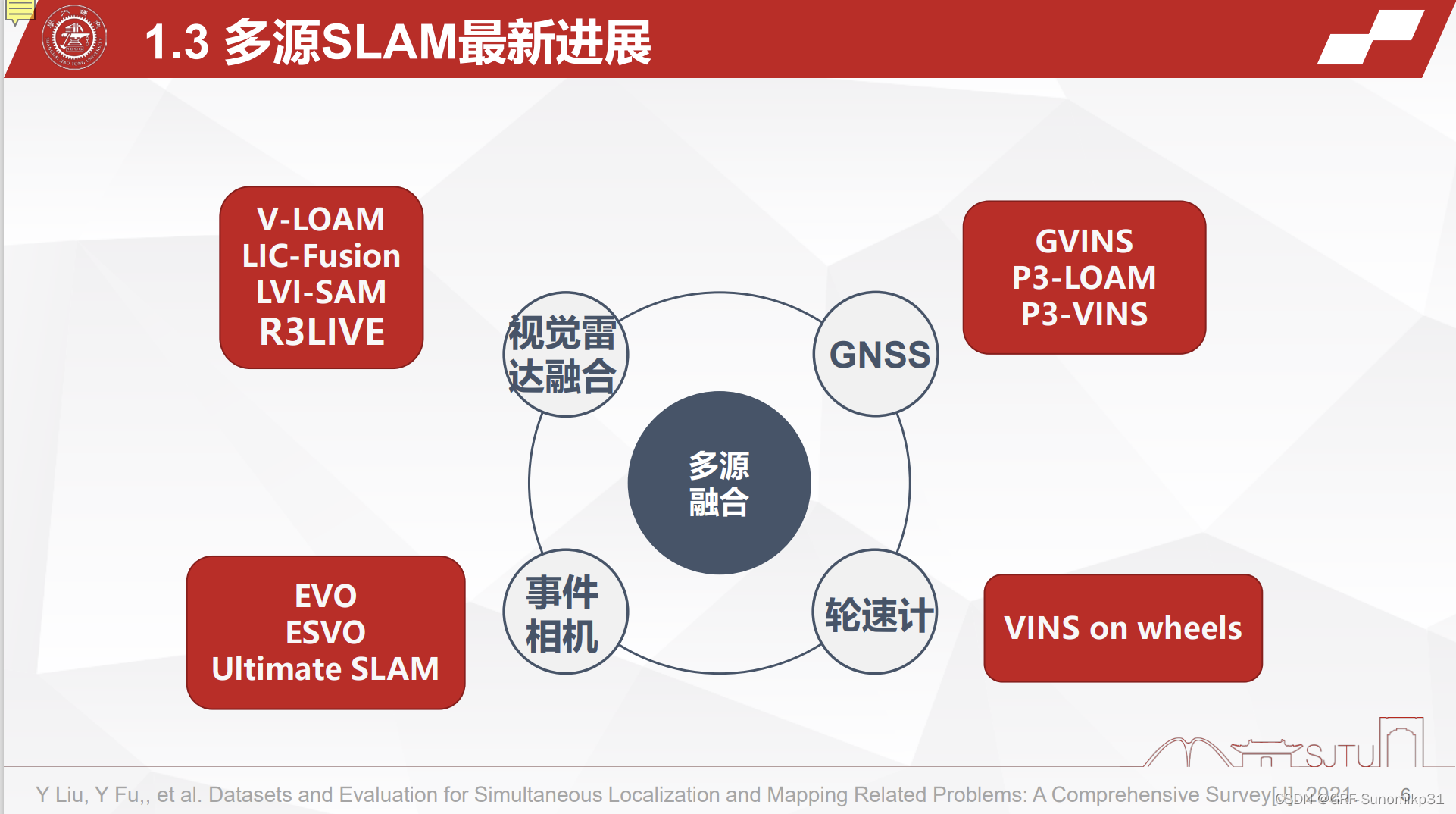
视觉和激光融合:比较早的工作V-LOAM(2014,非开源);
GNSS融合:在户外场景下可以获得全局坐标进而消除漂移;
事件相机融合:可以解决传统相机运动模糊和过曝的问题;
轮速计融合:VINS on wheels解决了一些场景下的退化问题,目前该场景已经非常完善了。
主讲人认为目前最有前景的是GNSS和SLAM的融合,因为GNSS和SLAM都是非常复杂的算法,并且做这块的并不是很多.
2 主流SLAM数据集回顾
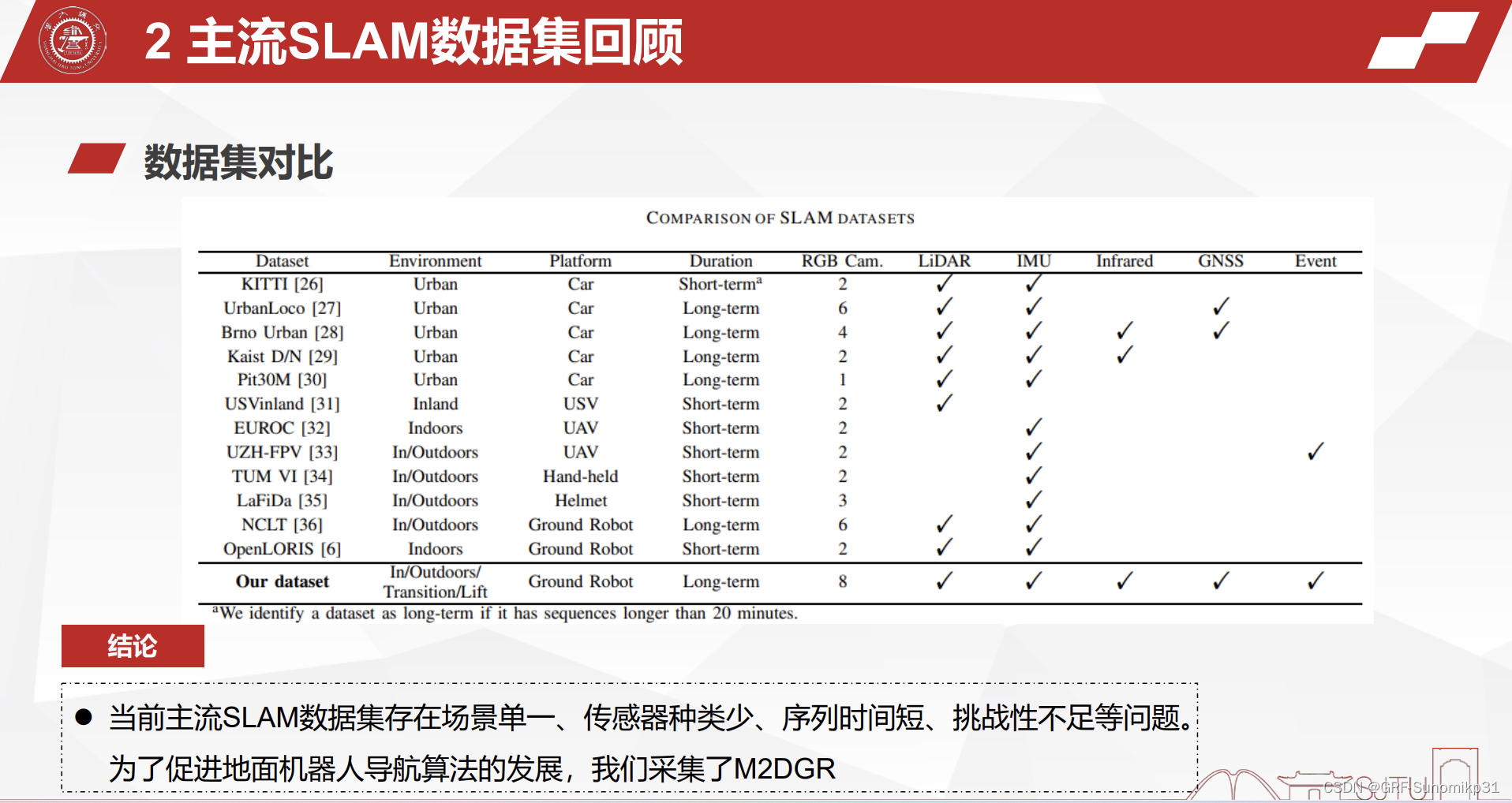
KITTI:年代久远而且传感器较少;视觉SLAM一般不采用该数据集,而采用TUM(手持RGBD)和EUROC(无人机);
NCLT:地面机器人采集,相机采集频率低,传感器少;
OpenLORIS:地面机器人采集,相机内外参不公布;gt获取不严谨,是由激光SLAM跑出来的;
3 M2DGR采集平台与环境
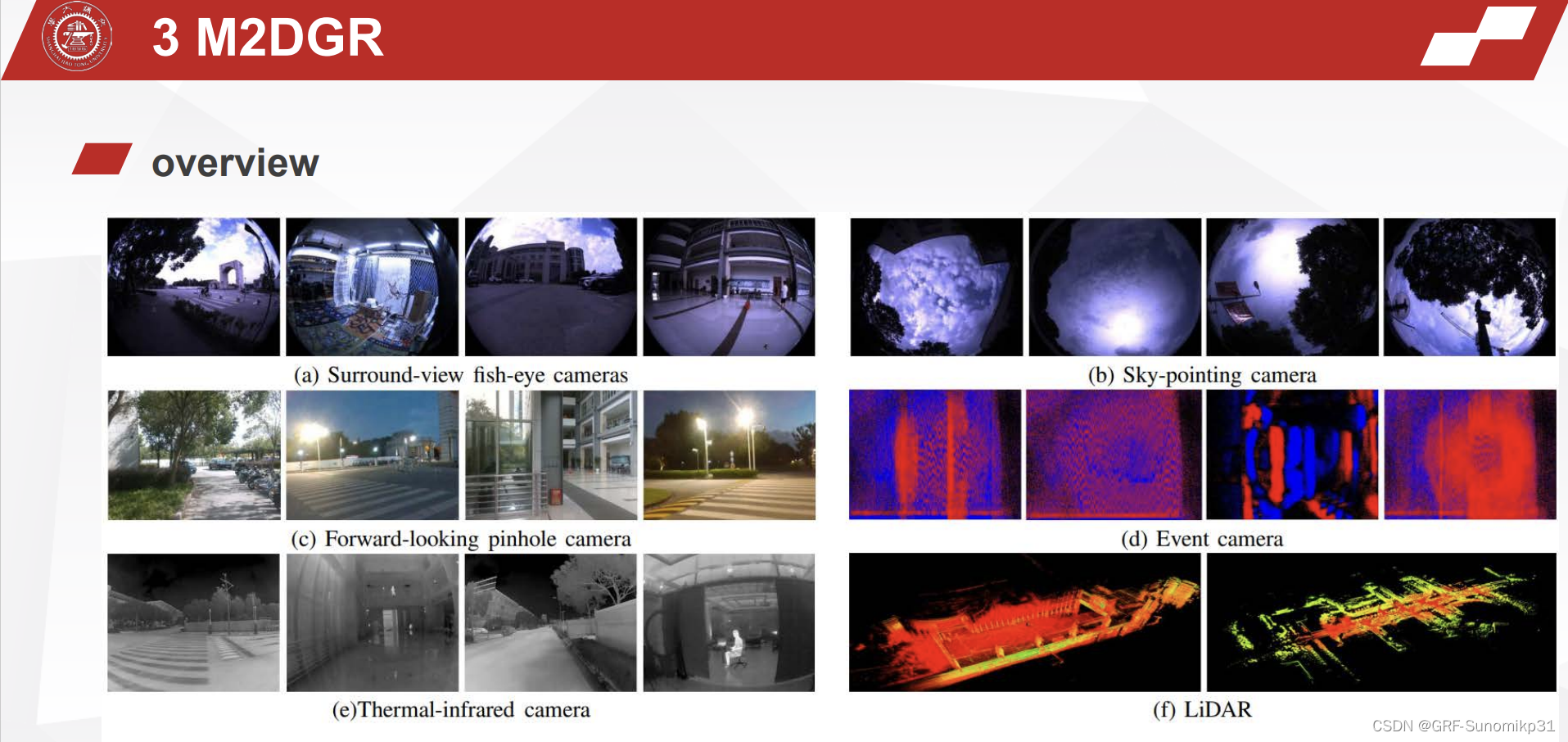
采集数据集的效果图;
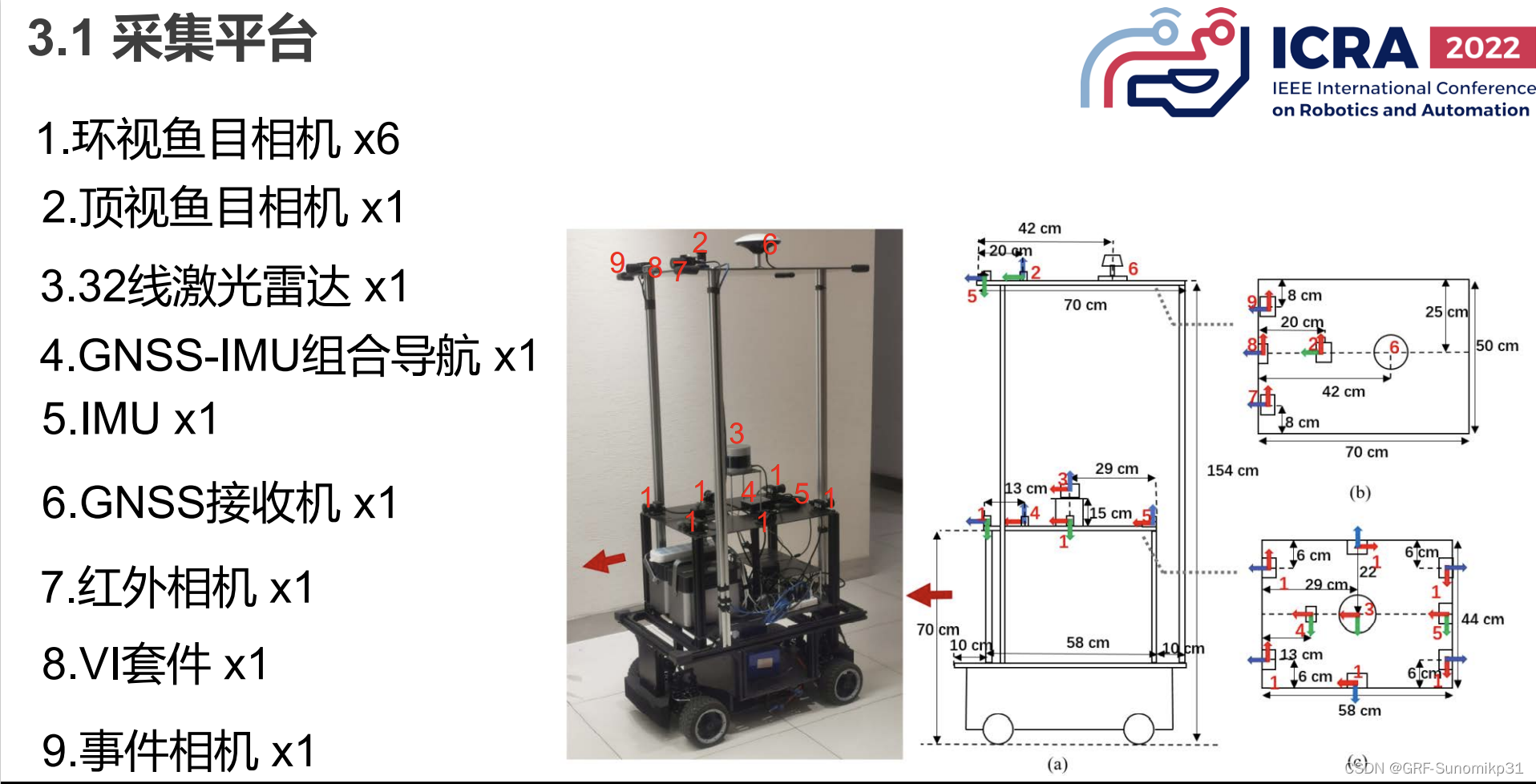
采集平台,具体设备如上;.GNSS-IMU组合导航主要用于采集室外RTK信号作为室外轨迹gt;lidar是通过网口连接到笔记本电脑的. IMU采用的是国产的消费级的设备(500-800rmb)

(a)室外的序列在上交进行采集的,这些序列都比较长,现有的SLAM算法在上面跑出的效果都比较不理想的, 属于非常有挑战的数据集;
(b)Roomdark是在全黑的场景下,用来对比普通相机 红外相机和事件相机的性能;
目的是测试室内外交替的SLAM算法性能;
(d)这个序列也是非常有挑战性的;
4 实验评估与结果分析
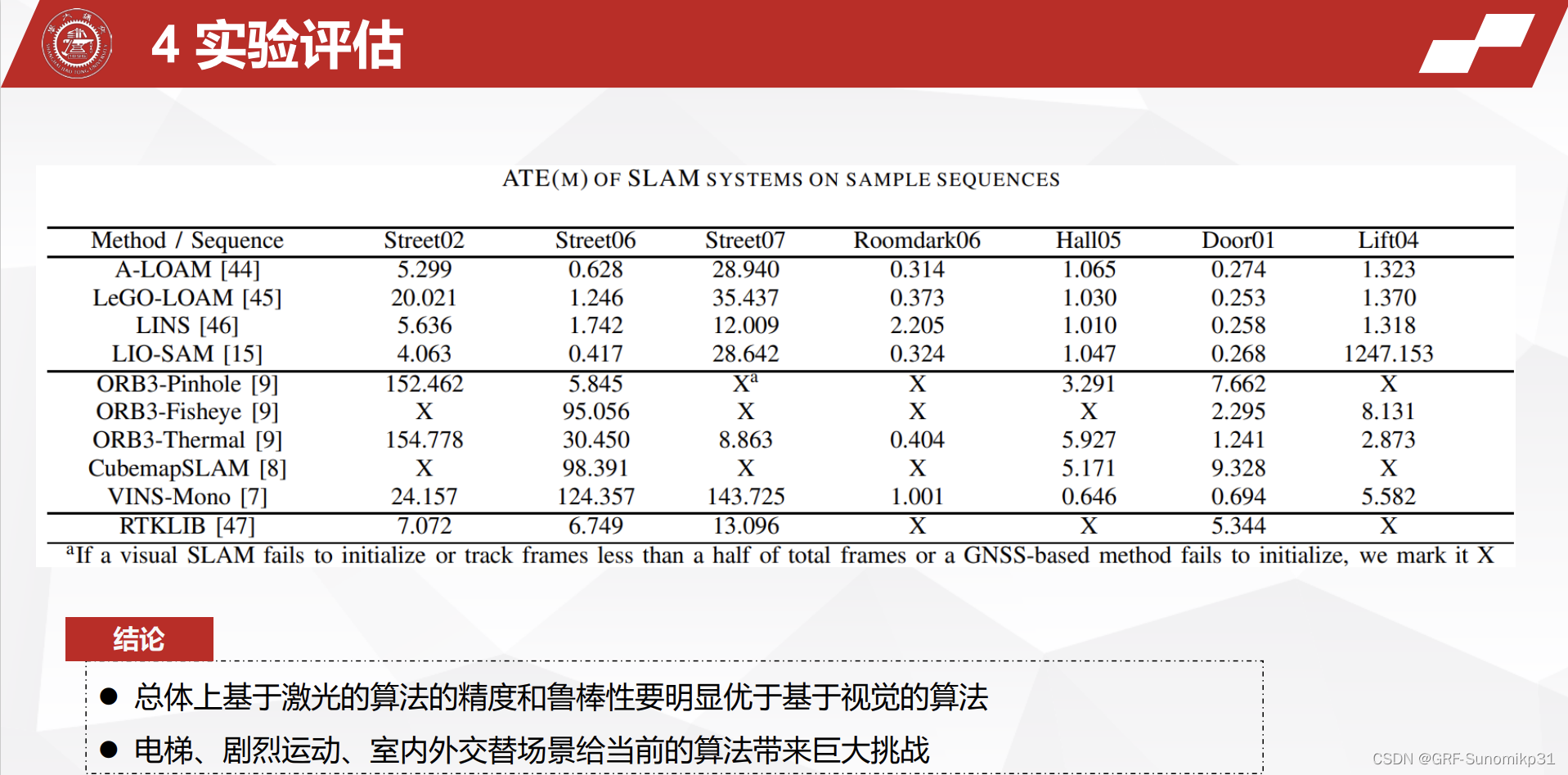
上面是7个比较有代表性的序列;
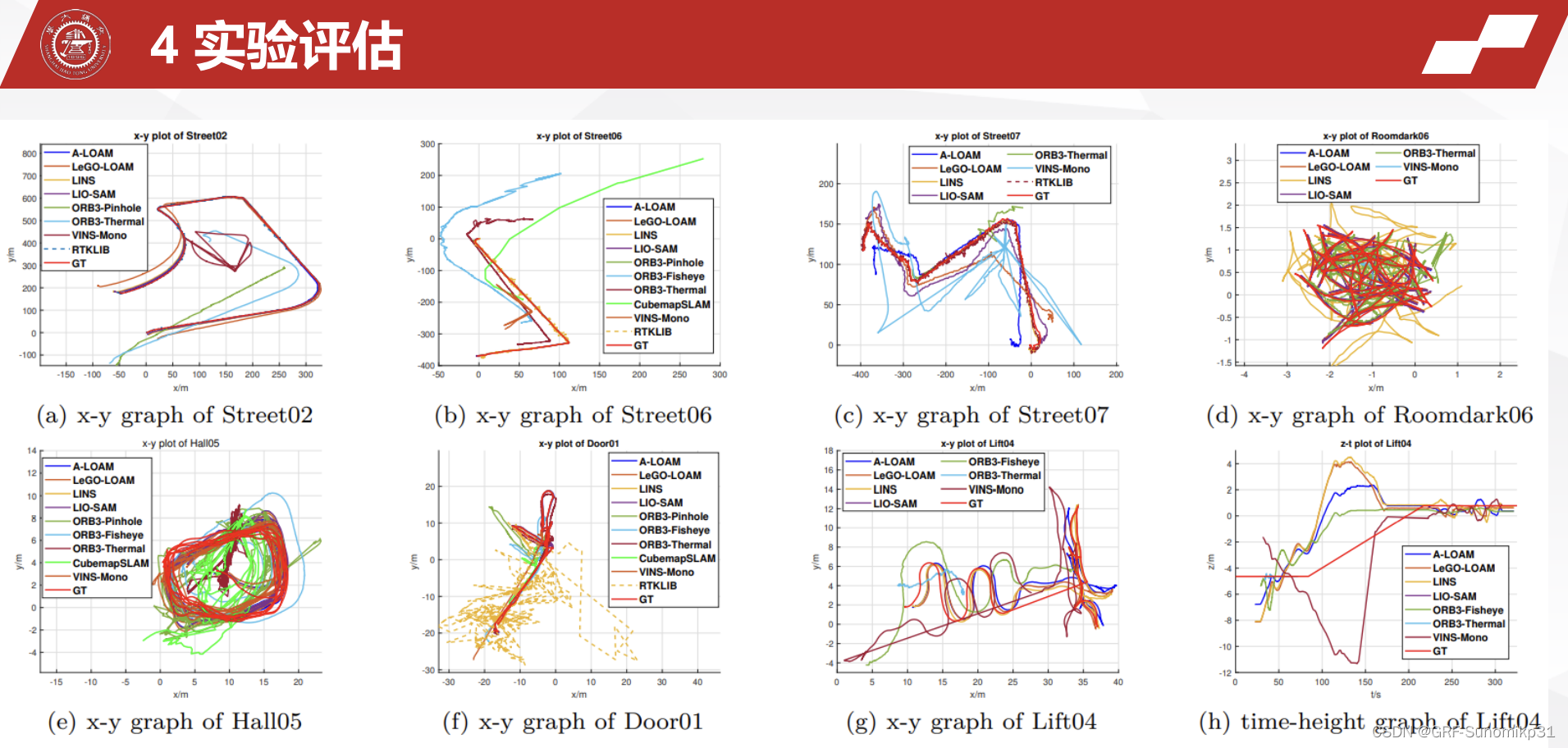
定位结果的可视化; 总结就是:群魔乱舞! 漂移都非常明显.
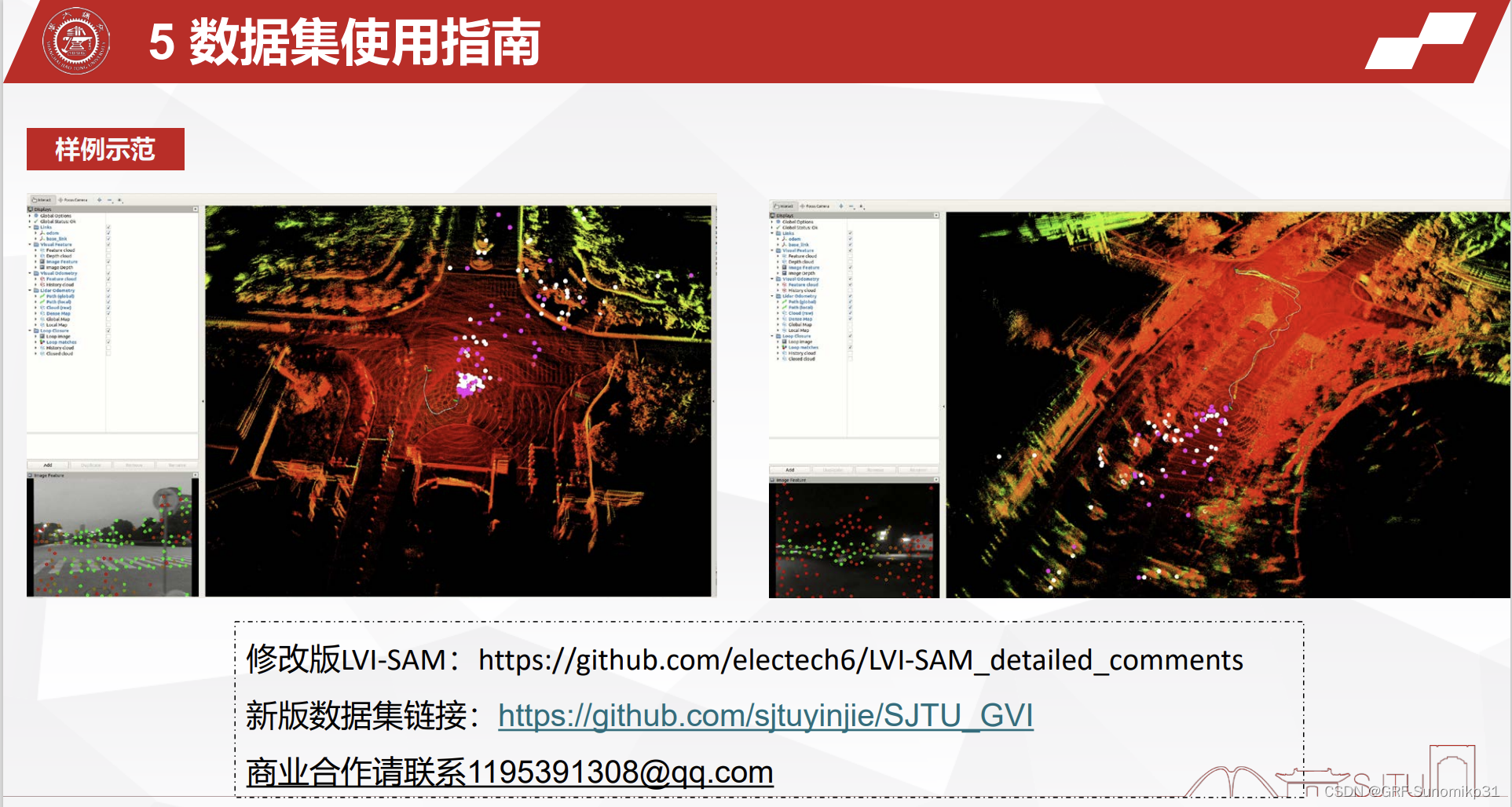
5 数据集使用指南
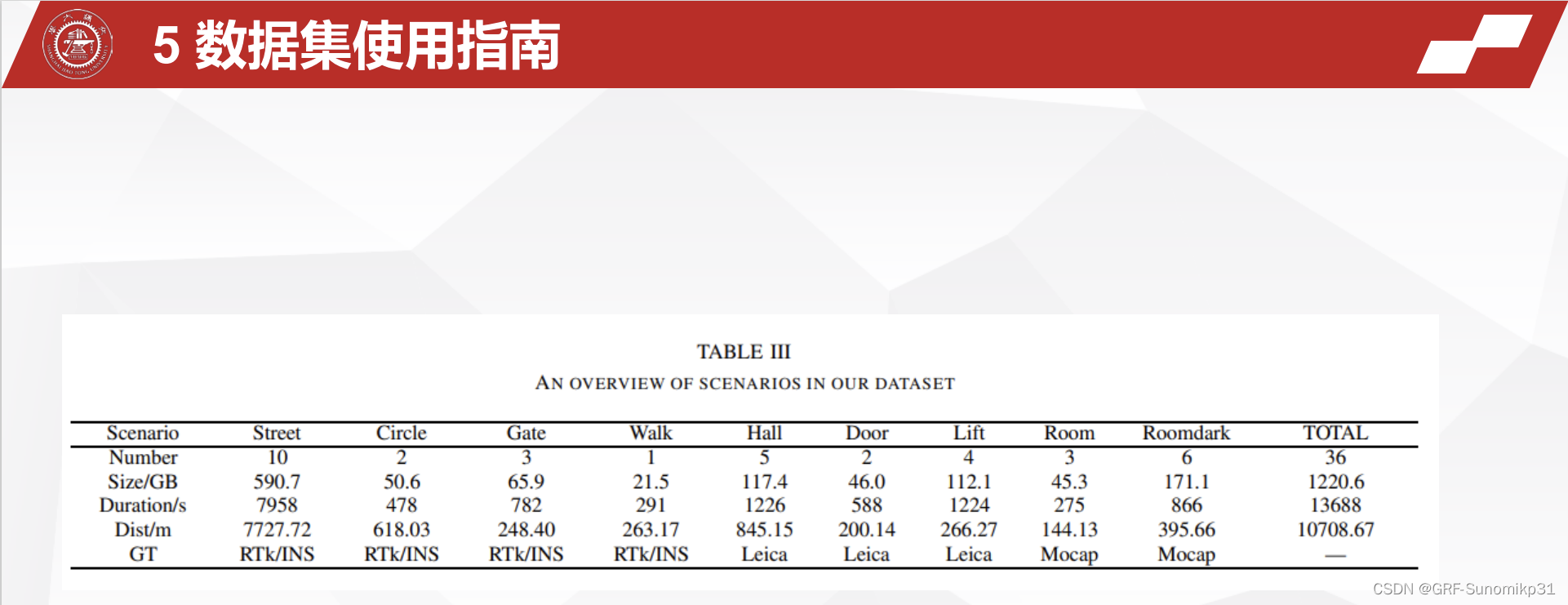
上面罗列了几个数据集的信息.
在校学生或者老师可以连接校园网 , 可以达到10M/S .

VSLAM单目的没法获得绝对尺度, 需要添加- s (scale). 如果你的算法能够稳定超过上面这些SOTA算法 (比如你的算法比orb-slam3高出2-3米), 恭喜你 , 你也可以发一篇ICRA了
以上是数据集使用的流程.作者会保持对该数据集的更新!
Q&A
1.相机和IMU的标定使用calib , 效果好并且标定简单;
2.九轴的IMU比六轴的IMU能采集更加立体的信息.
3.KITTI的数据集IMU数据集可能有问题 , 不建议使用KITTI跑视觉SLAM的系统.
4.NUC 3000-5000左右的性能不太好 , 建议使用顶配的NUC.
边栏推荐
- Ros2 - node (VII)
- 扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
- Sum of two numbers, the numbers in the array are converted to decimal, added, and output inversely
- Ros2 - common command line (IV)
- Unity ugui how to match and transform coordinates between different UI panels or uis
- [untitled]
- 2022.06.27_每日一题
- inux摄像头(mipi接口)简要说明
- 小米笔试真题一
- 一文揭开,测试外包公司的真实情况
猜你喜欢

ROS2——初识ROS2(一)
Ros2 - Service Service (IX)
一文揭开,测试外包公司的真实情况
cgroup_ memcg

Qt项目中的日志库log4qt使用
SOC_SD_DATA_FSM
Build a microservice cluster environment locally and learn to deploy automatically
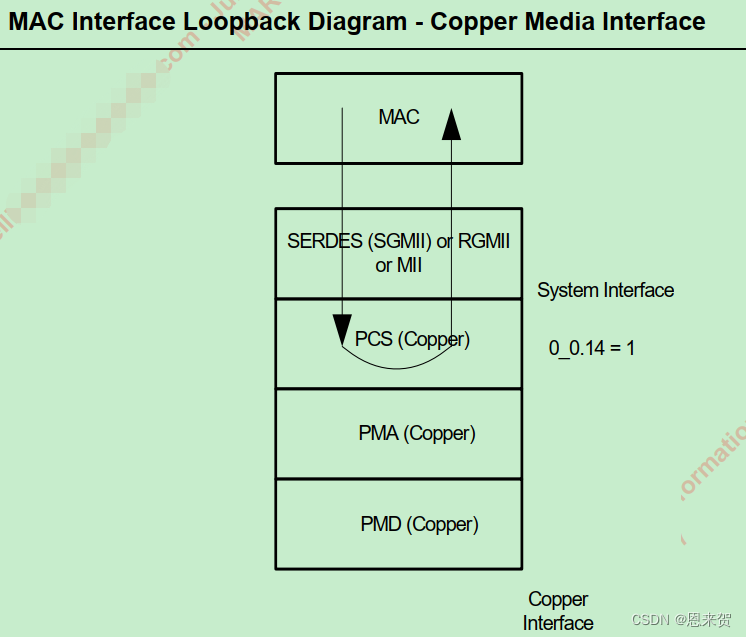
Marvell 88E1515 PHY loopback模式测试
The problem of Chinese garbled code in the vscode output box can be solved once for life
window navicat连接阿里云服务器mysql步骤及常见问题
随机推荐
[untitled]
Docker installs MySQL and uses Navicat to connect
Lexin interview process
小米笔试真题一
ROS2——topic话题(八)
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
Cloud native related technology learning
UIO driven framework
Unity 之 ExecuteAlways正在取代ExecuteInEditMode
程序中的负数存储及类型转换
U-boot initialization and workflow analysis
Error: “MountVolume.SetUp failed for volume pvc 故障处理
Rehabilitation type force deduction brush question notes D2
【软件测试】06 -- 软件测试的基本流程
The problem of Chinese garbled code in the vscode output box can be solved once for life
ROS2——ROS2对比ROS1(二)
ROS2——功能包(六)
能量守恒和打造能量缺口
A brief introduction to heading/pitch/roll and omega/phi/kappa
Orin 安装CUDA环境