当前位置:网站首页>PHY drive commissioning --- mdio/mdc interface Clause 22 and 45 (I)
PHY drive commissioning --- mdio/mdc interface Clause 22 and 45 (I)
2022-07-05 06:53:00 【Enlaihe】
Recently, I was debugging a Phy The driver , From no clue to a little understanding, I have experienced too much pain , So I decided to write this series to record . Special thanks to countless excellent bloggers for their selfless dedication. Many excellent blogs have given me great help . In this series , I will also reprint some excellent blog posts ( A link will be attached ), And add your own understanding , If part of the content has infringement , Please contact me .
summary
management MII Interface MDIO The interface is a two-wire serial interface , Used to correct PHY Chips, etc The physical layer Information operation management .
MDIO The history of
MDIO yes Management Data Input/Output Abbreviation , There are two wires , They are bidirectional MDIO And unidirectional MDC, It is used in the upper and middle layers of Ethernet equipment The physical layer Management of . The reason why we can manage these PHY chip , It's because I can be right PHY Access and modify various registers of the chip .
MDIO The interface was originally created by IEEE RFC802.3 Medium 22 As defined in Clause No , In the original definition , A single MDIO Interface can access 32 Different PHY In the equipment 32 A register , These registers provide status and control information , for example : Connection status 、 Transmission speed capability 、 The currently selected transmission speed 、 Power down during low voltage consumption 、 Full duplex or half duplex 、 Automatic negotiation 、 Error prompt and feedback information, etc .
In order to satisfy the 10G The popularity and development of Ethernet equipment , stay IEEE 802.3ae Of 45 In Clause No MDIO The interface provides additional specifications :
- Can pass 32 Port access 32 Different devices 65536 A register ;
- For the visit 10G Ethernet provides additional OP Code and ST code , Thus, the register address can be accessed directly ;
- End to end error signal ;
- Loopback mode control ;
- Low voltage electrical standards .
How it works
MDIO The bus has two signals : Manage data clock (MDC) And manage data entry / Output (MDIO).
MDIO There are specific terms in the interface that define the various devices on the bus . drive MDIO The device of the bus is defined as the station management entity (STA). And be MDC The managed target device is called MDIO Managed devices (MMD).
STA initialization MDIO All communications , At the same time, it is responsible for driving the clock MDC.MDC The frequency of can be as high as 2.5 MHz.
22 Clause No
22 Clause No MDIO The frame format of communication is defined as follows :
45 Clause No
To make up for it 22 Defects as defined in Clause No ,45 Support for low voltage equipment has been added to Clause No , As low as 1.2V, At the same time, the frame format is expanded , Access to more devices and registers .
45 Number MDIO The format of communication frame is as follows :
The first 45 The main change in Clause No. 1 is how to access registers . In the 22 in , A single frame specifies the address and data to be read or written , At the same time, these works have been completed .45 Change this paradigm , The first address frame is sent to the specified address frame MMD And registers , The second frame is then sent to perform read or write .
The advantage of adding this sequential circular access is 45 The terms are backwards compatible 22 The terms of , Allow interoperability of devices . secondly , By creating a registration address for the framework , Address space from 5 Bit increase to 16 position , This makes STA visit 65536 Two different registers .
To do this , Some changes have been made in the components of the data frame . Defined a new ST Code (00), Used to identify No 45 Data frame of clause No . The operation code is extended to the specified address frame , Write frame , Read frame , Or read and read incremental address frames . Because the register address is no longer needed , This field is replaced by the content that specifies the target device type . After expansion, it also allows STA Access in addition to PHY Other equipment than .
Reprint blog address : Understand and MDIO/MDC Interface related 22 Number 、45 Clause No
边栏推荐
- 并发编程 — 如何中断/停止一个运行中的线程?
- Pycahrm reports an error: indentation error: unindent does not match any outer indentation
- C语言数组专题训练
- [Chongqing Guangdong education] 1185t administrative leadership reference test of National Open University in autumn 2018
- In C language, int a= 'R'
- Xavier CPU & GPU high load power consumption test
- Qt项目中的日志库log4qt使用
- Interpretation of the earliest sketches - image translation work sketchygan
- ROS2——常用命令行(四)
- ROS2——安装ROS2(三)
猜你喜欢
The “mode“ argument must be integer. Received an instance of Object
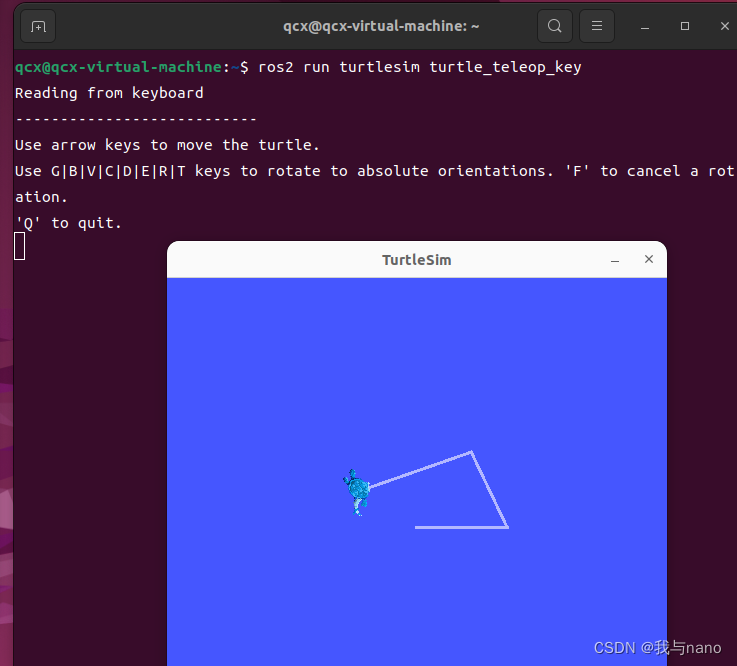
ROS2——常用命令行(四)

ROS2——初识ROS2(一)
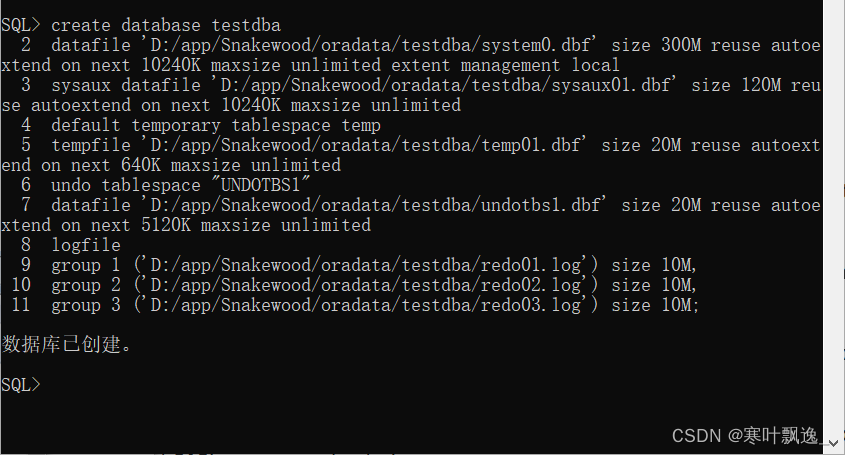
1. Create Oracle database manually
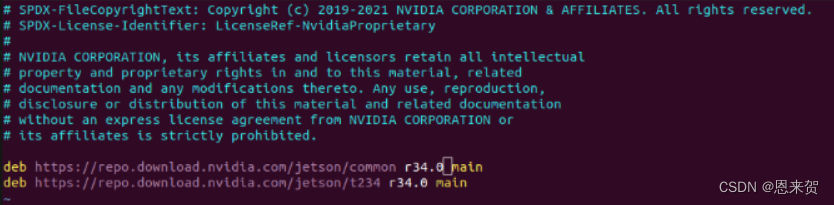
Orin installs CUDA environment
![[Gaode map POI stepping pit] amap Placesearch cannot be used](/img/4c/55586ffcc2267c477a4532ab51a0c1.png)
[Gaode map POI stepping pit] amap Placesearch cannot be used
Skywalking全部

SD_CMD_RECEIVE_SHIFT_REGISTER
SolidWorks template and design library are convenient for designers to call
ROS2——node节点(七)
随机推荐
[nvidia] CUDA_ VISIBLE_ DEVICES
'mongoexport 'is not an internal or external command, nor is it a runnable program or batch file.
Marvell 88E1515 PHY loopback模式测试
7. Oracle table structure
Volcano 资源预留特性
C语言数组专题训练
Architecture
Dameng database all
Spinningup drawing curve
Utf8 encoding
Getting started with typescript
乐鑫面试流程
GDB code debugging
. Net core stepping on the pit practice
Using handler in a new thread
SOC_SD_DATA_FSM
SRE核心体系了解
Log4qt usage of logbase in QT project
[MySQL 8.0 does not support capitalization of table names - corresponding scheme]
Marvell 88e1515 PHY loopback mode test