当前位置:网站首页>ROS2——功能包(六)
ROS2——功能包(六)
2022-07-05 06:35:00 【我与nano】
ROS2机器人操作系统
前言
每个机器人可能有很多功能,比如移动控制、视觉感知、自主导航等,如果我们把这些功能的源码都放到一起当然也是可以的,但是当我们想把其中某些功能分享给别人时,就会发现代码都混合到了一起,很难拆分出来。
一、功能包是什么

举个例子,我们手上有很多红豆、绿豆、黄豆,假设都放在一个袋子里,如果只想把黄豆都拿出来,是不是得在五颜六色的豆子里一颗一颗都找出来,数量越多,你就越头疼;如果我们把不同颜色的豆子放在不同的三个袋子里,需要拿出某种豆子的时候,不就立刻可以找出来了么。
功能包就是这个原理,我们把不同功能的代码划分到不同的功能包中,尽量降低他们之间的耦合关系,当需要在ROS社区中分享给别人的时候,只需要说明这个功能包该如何使用,别人很快就可以用起来了。
所以功能包的机制,是提高ROS中软件复用率的重要方法之一。
二、功能包的具体使用
1.创建功能包
我们可以使用这个指令:
ros2 pkg create --build-type <build-type> <package_name>
ros2命令中:
**pkg:**表示功能包相关的功能;
**create:**表示创建功能包;
build-type:表示新创建的功能包是C++还是Python的,如果使用C++或者C,那这里就跟ament_cmake,如果使用Python,就跟ament_python;
**package_name:**新建功能包的名字。
比如在终端中分别创建C++和Python版本的功能包:
cd ~/dev_ws/src
ros2 pkg create --build-type ament_cmake learning_pkg_c # C++
ros2 pkg create --build-type ament_python learning_pkg_python # Python

2.编译功能包
在创建好的功能包中,我们可以继续完成代码的编写,之后需要编译和配置环境变量,才能正常运行:
cd ~/dev_ws/src
colcon build # 编译工作空间所有功能包
source install/local_setup.bash
3.功能包的结构
C++功能包
首先看下C++类型的功能包,其中必然存在两个文件:package.xml和CMakerLists.txt。
package.xml文件的主要内容如下,包含功能包的版权描述,和各种依赖的声明。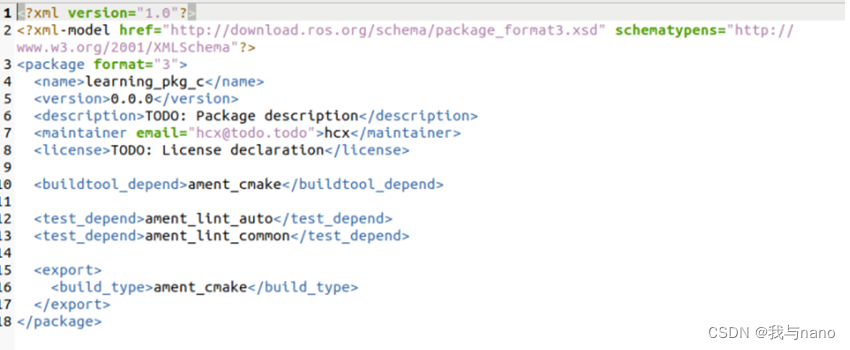
CMakeLists.txt文件是编译规则,C++代码需要编译才能运行,所以必须要在该文件中设置如何编译,使用CMake语法。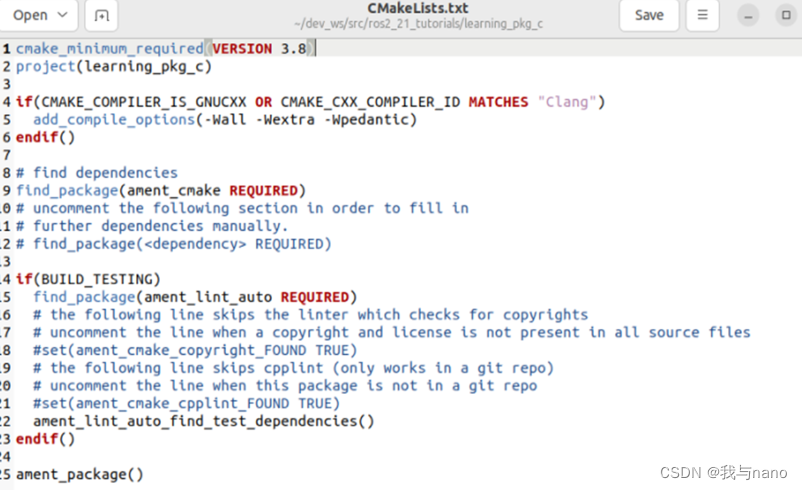
Python功能包
C++功能包需要将源码编译成可执行文件,但是Python语言是解析型的,不需要编译,所以会有一些不同,但也会有这两个文件:package.xml和setup.py。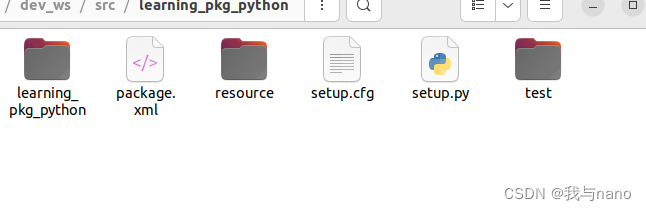
package.xml文件的主要内容和C++版本功能包一样,包含功能包的版权描述,和各种依赖的声明。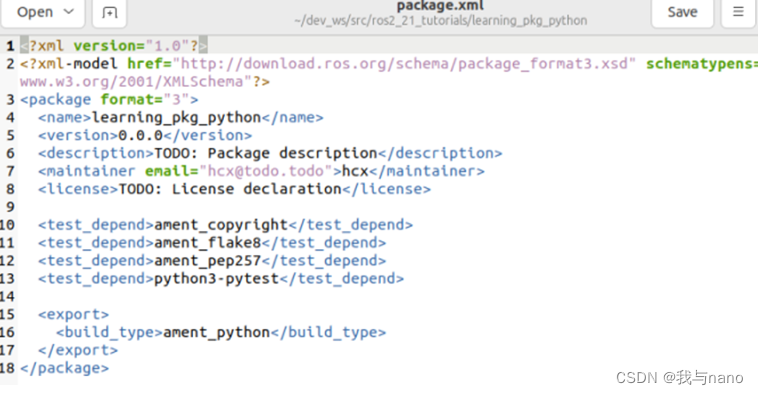
setup.py文件里边也包含一些版权信息,除此之外,还有“entry_points”配置的程序入口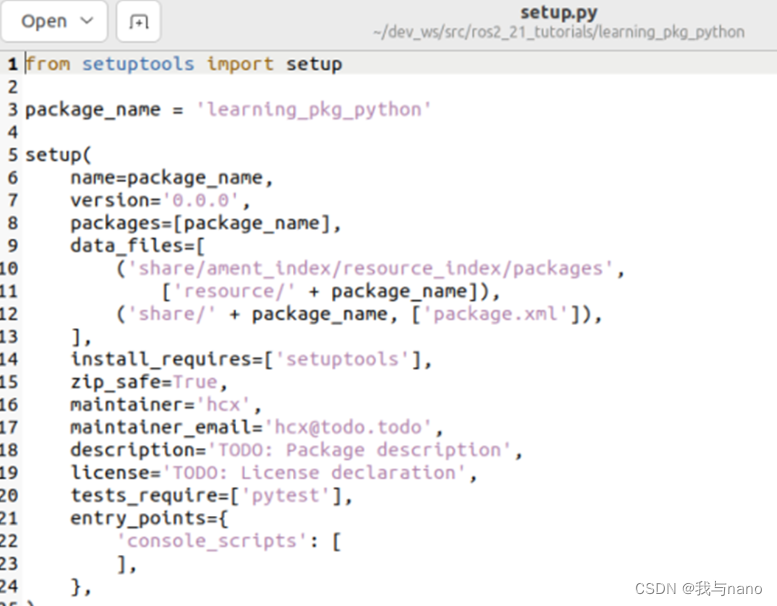
边栏推荐
- H5 embedded app adapts to dark mode
- 4. Oracle redo log file management
- Dataframe (1): introduction and creation of dataframe
- Vant weapp swippecell set multiple buttons
- Utf8 encoding
- All English in the code
- [moviepy] unable to find a solution for exe
- Rehabilitation type force deduction brush question notes D3
- Redis-01.初识Redis
- 【MySQL8.0不支持表名大写-对应方案】
猜你喜欢
3. Oracle control file management
Paper reading report

Log4qt usage of logbase in QT project

Redis-01.初识Redis

Game theory acwing 893 Set Nim game
Configuration method and configuration file of SolidWorks GB profile library

Volcano 资源预留特性
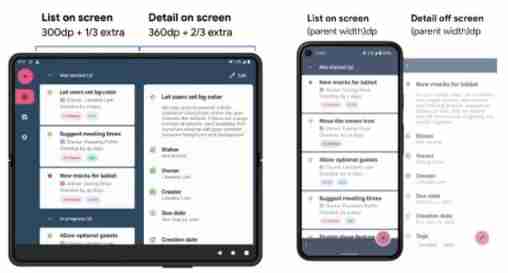
Design specification for mobile folding screen
达梦数据库全部
Orin two brushing methods
随机推荐
GDB code debugging
Financial risk control practice -- feature derivation based on time series
Paper reading report
International Open Source firmware Foundation (osff) organization
Rehabilitation type force deduction brush question notes D3
在新线程中使用Handler
H5内嵌App适配暗黑模式
Vant Weapp SwipeCell設置多個按鈕
The differences and connections among cookies, sessions, JWT, and tokens
In C language, int a= 'R'
Written examination notes
Technical conference arrangement
Bit of MySQL_ OR、BIT_ Count function
3.Oracle-控制文件的管理
Error: “MountVolume.SetUp failed for volume pvc 故障处理
SRE核心体系了解
Huawei bracelet, how to add medicine reminder?
mysql设置触发器问题
UIO driven framework
如何正确在CSDN问答进行提问