当前位置:网站首页>A brief introduction to heading/pitch/roll and omega/phi/kappa
A brief introduction to heading/pitch/roll and omega/phi/kappa
2022-07-05 06:37:00 【Flying from place to place】
Heading/Pitch/Roll vs Omega/Phi/Kappa
I am engaged in aerial triangulation , These two sets of attitude information are often used , Some information checked on domestic and foreign websites , I've sorted out .
Heading/Pitch/Roll
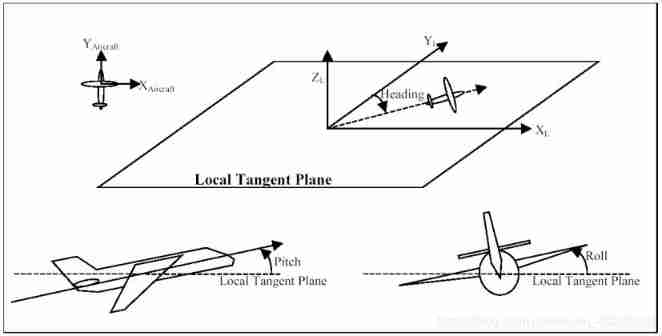
The first said Heading, Pitch, and Roll. These are the images / Sensors x、y、z The axis is transformed into three rotations of the local horizontal plane . Generally speaking , These rotations are applied sequentially .
Heading - around Z The rotation of the shaft .
Pitch - around X Shaft rotation
Roll - Around the Y Shaft rotation
Heading、Pitch、Roll It's the plane ( That's the image ) Of the local plane X、Y、Z The angle of the axis . This local plane is usually defined as the plane tangent to the geodetic ellipsoid at the exposure point . The north of the local plane (+Y) The axis is the tangent of the local longitude on the ellipsoid , Point to the pole . The east of the local plane (+X) The axis is the tangent of the geodetic ellipsoid , Perpendicular to the local meridian . On the local plane (+Z) The axis is perpendicular to the earth ellipsoid , Perpendicular to the earth ellipsoid .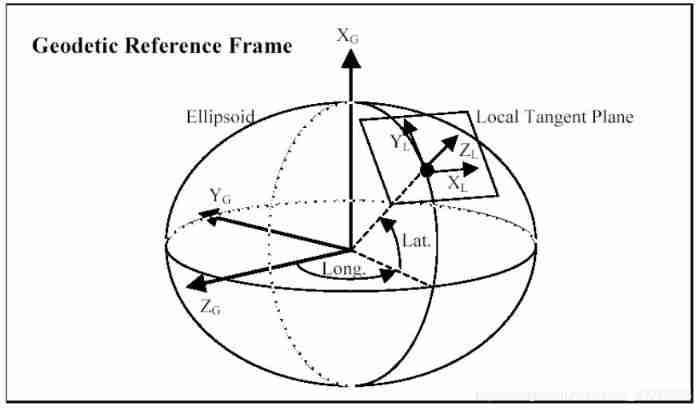
Can be applied Heading、Pitch、Roll Rotate to convert the original image to the correct position on the local tangent plane . Aligning the image axis with the plane axis is usually a very simple thing , May include exchange X and Y, Change the symbol on one or more angles , And apply the calibration offset . after , Apply translation 、 Pitch and roll rotation to map the original image to the local tangent plane .
camera / The coordinates of sensors are usually expressed in the so-called “ Centered on the earth ---- The earth is fixed ”(ECEF) Geodetic reference frame as benchmark .X、Y、Z The coordinates are measured from the center of the ellipsoid , Not on a plane . They can also use latitude 、 Longitude and height on ellipsoid . Traditionally , majority GPS/INS Applied to Geodetic applications , Among them, ellipsoid reference system is the first choice . However , For photogrammetric applications , We have to make a flat image , It can be used at any time in projection , And merge with other projection data . It is necessary for us to convert our local tangent plane into a mapping projection plane , Such as UTM etc. .
Now our image is on the course 、 pitch 、 The rolling is corrected , But mapped to a locally defined plane . The next step is to convert our local plane image into a world-based projection , Such as UTM. The local tangent plane is defined with reference to the geodetic ellipsoid . It is tangent to the ellipsoid at the exposure point .UTM Projection is formed by projecting the ellipsoid earth onto a cylinder . The cylinder is placed transversely on the ellipsoid , Tangent to the earth along the longitude and latitude line . The meridian of this tangent is called the central meridian . When we expand the cylinder to form a plan , The central meridian will remain along UTM+Y The vertical line of the axis . When you leave the central meridian , Other meridians will appear more and more upturned , Meet with the central meridian at the poles . The local longitude passing through the tangent point of the local plane usually does not coincide with the central longitude . This means that the local tangent plane X Axis and Y Shaft with UTM Projective X Axis and Y The axis will be different . In both systems ,Z The axis will be different everywhere , Unless the local tangent point is right on the central meridian .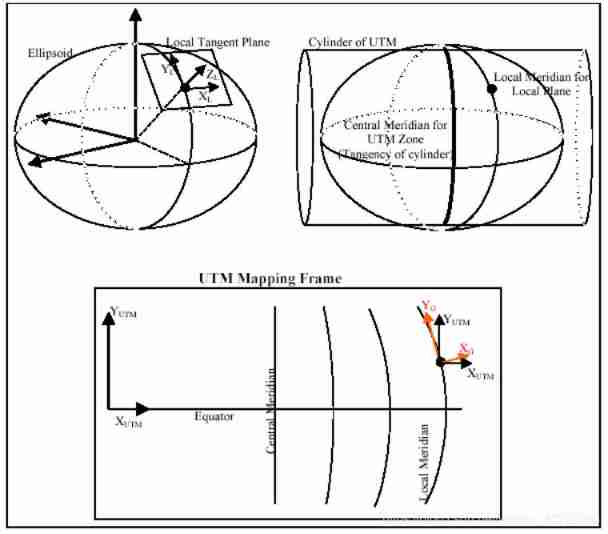
Omega, Phi, Kappa
Now say Omega、Phi、Kappa External posture of form . These three rotations are image reference system and plane 、 Projection mapping plane ( The most common is UTM) The transformation between . These three rotations are usually applied in sequence .
Omega - around X The rotation of the shaft
Phi - Around the Y Shaft rotation
Kappa - Around the Z Shaft rotation
These angles will produce a transformation with all of the above ( be based on Heading、Pitch、Roll) Same result , Directly map the original image to UTM Mapping plane . Because aerial photogrammetry mainly focuses on acquiring geographic coordinate system , So they usually only use Omega, Phi, Kappa.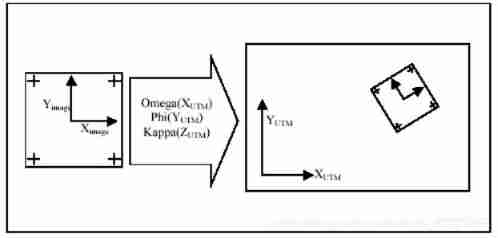
At present, some software can be converted to each other , hold Heading、Pitch、Roll Convert to Omega、Phi、Kappa. I am engaged in aerial photogrammetry , Commonly used empty three software, such as Inpho perhaps Photoscan And other software support two formats .
边栏推荐
猜你喜欢
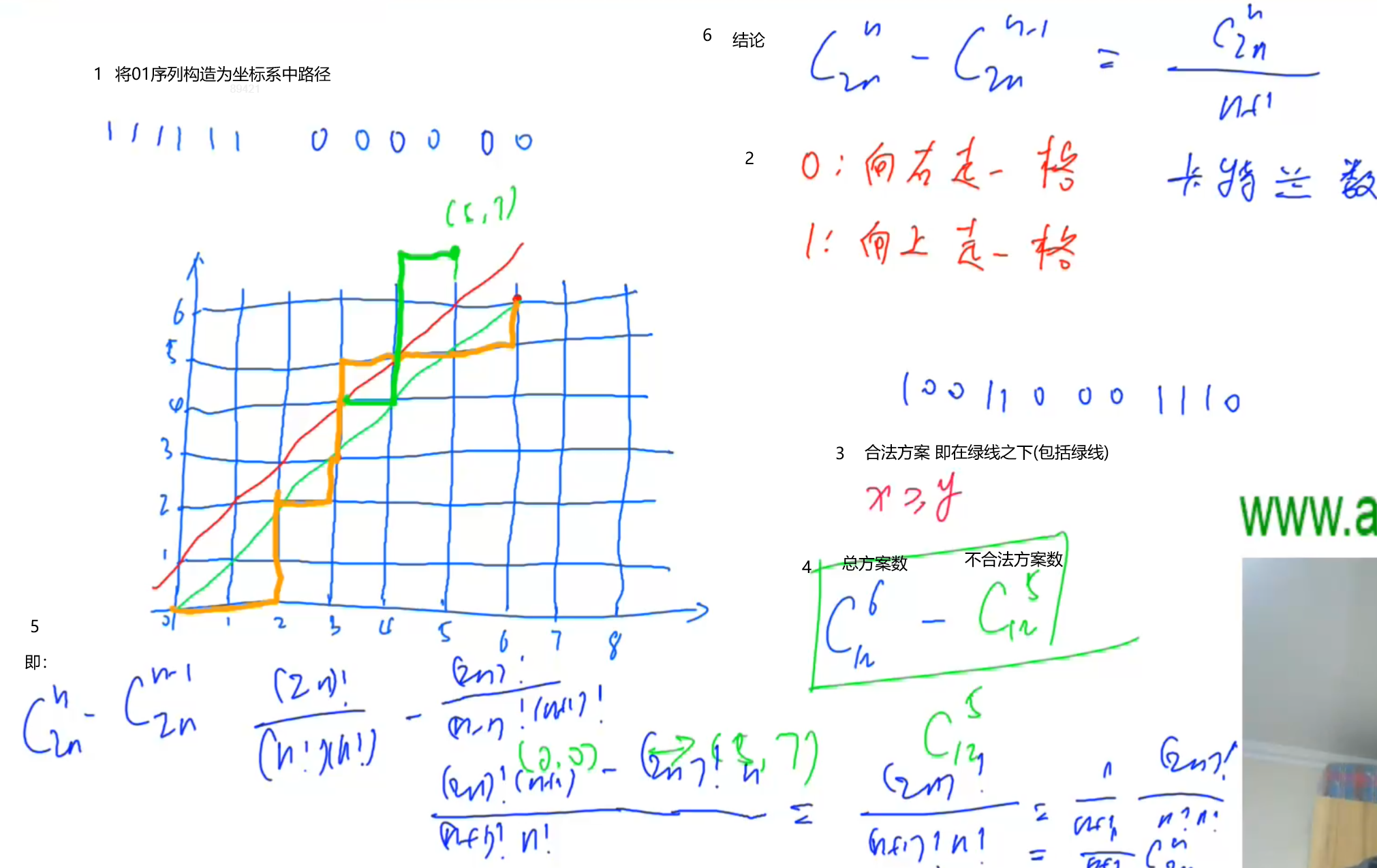
Find the combination number acwing 889 01 sequence meeting conditions

Game theory acwing 893 Set Nim game

2.Oracle-数据文件的添加及管理
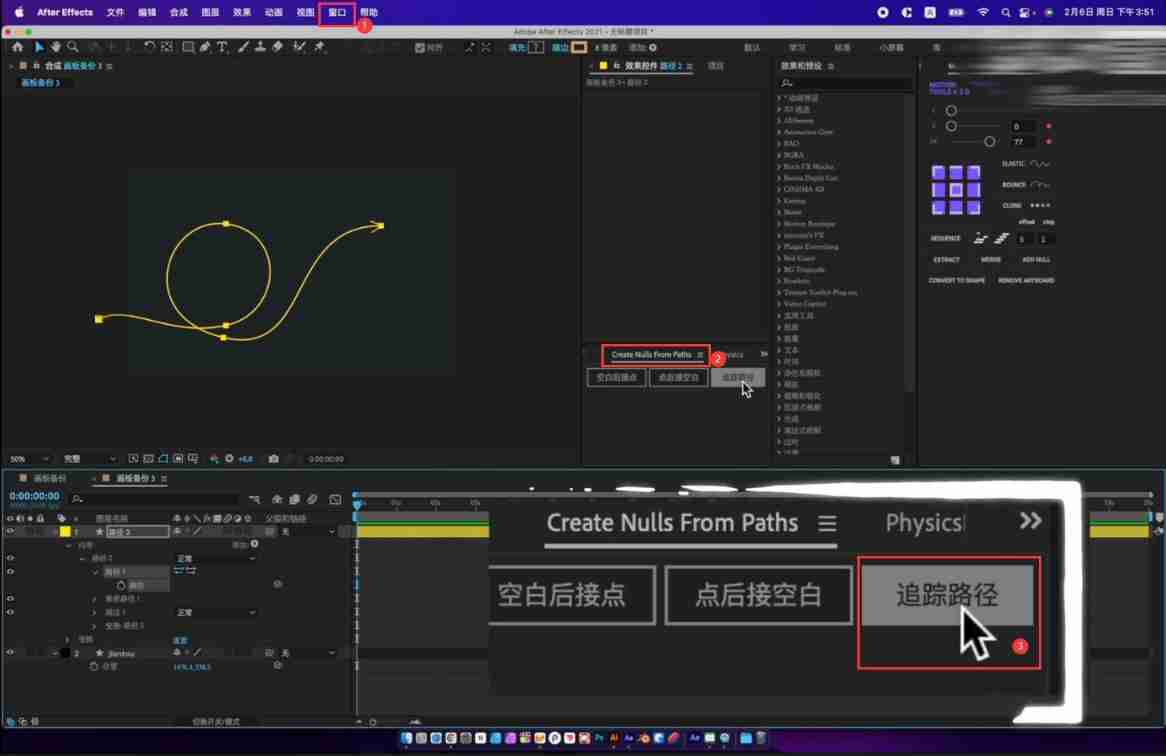
AE tutorial - path growth animation
求组合数 AcWing 888. 求组合数 IV
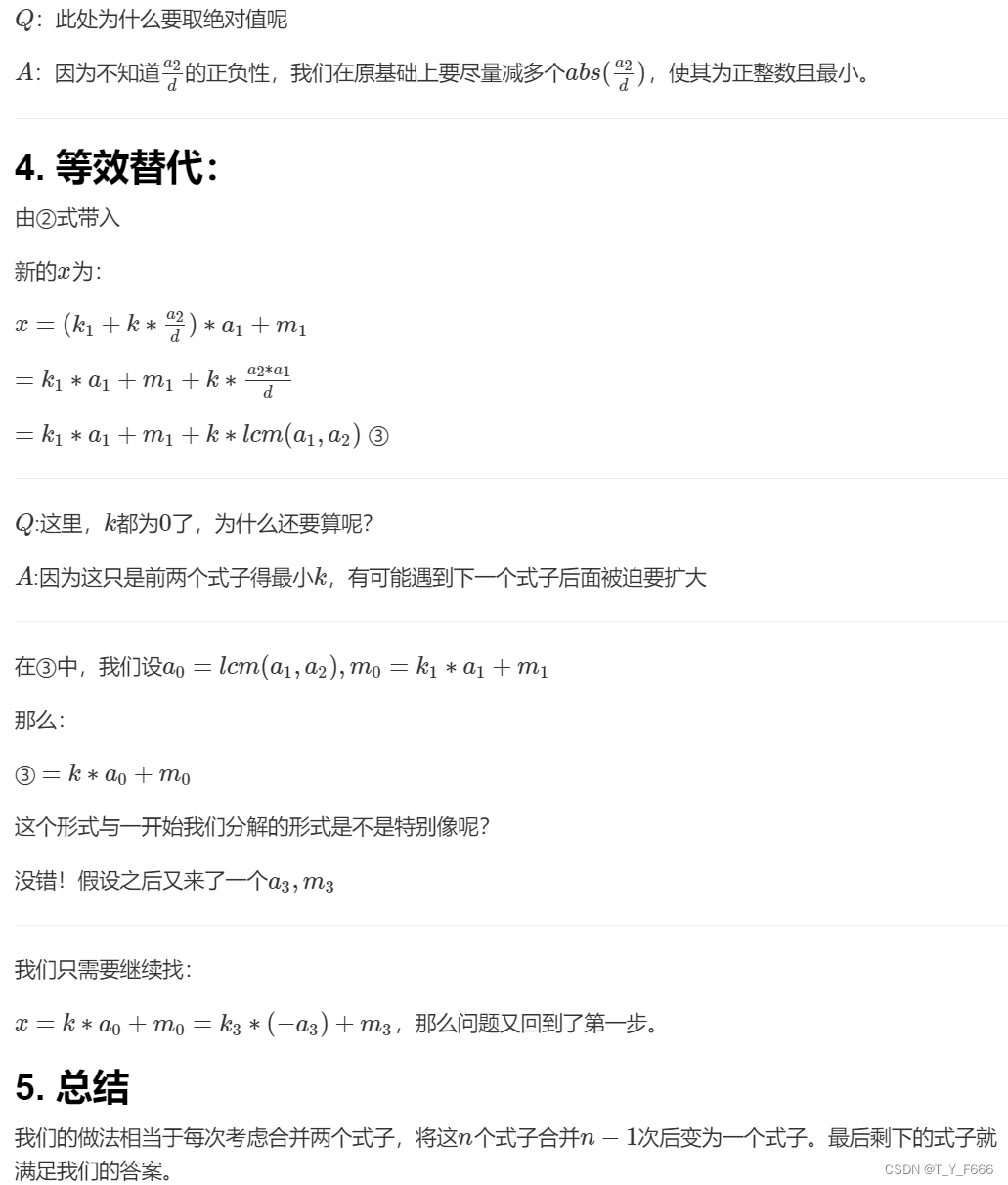
中国剩余定理 AcWing 204. 表达整数的奇怪方式
Vscode configures the typera editor for MD
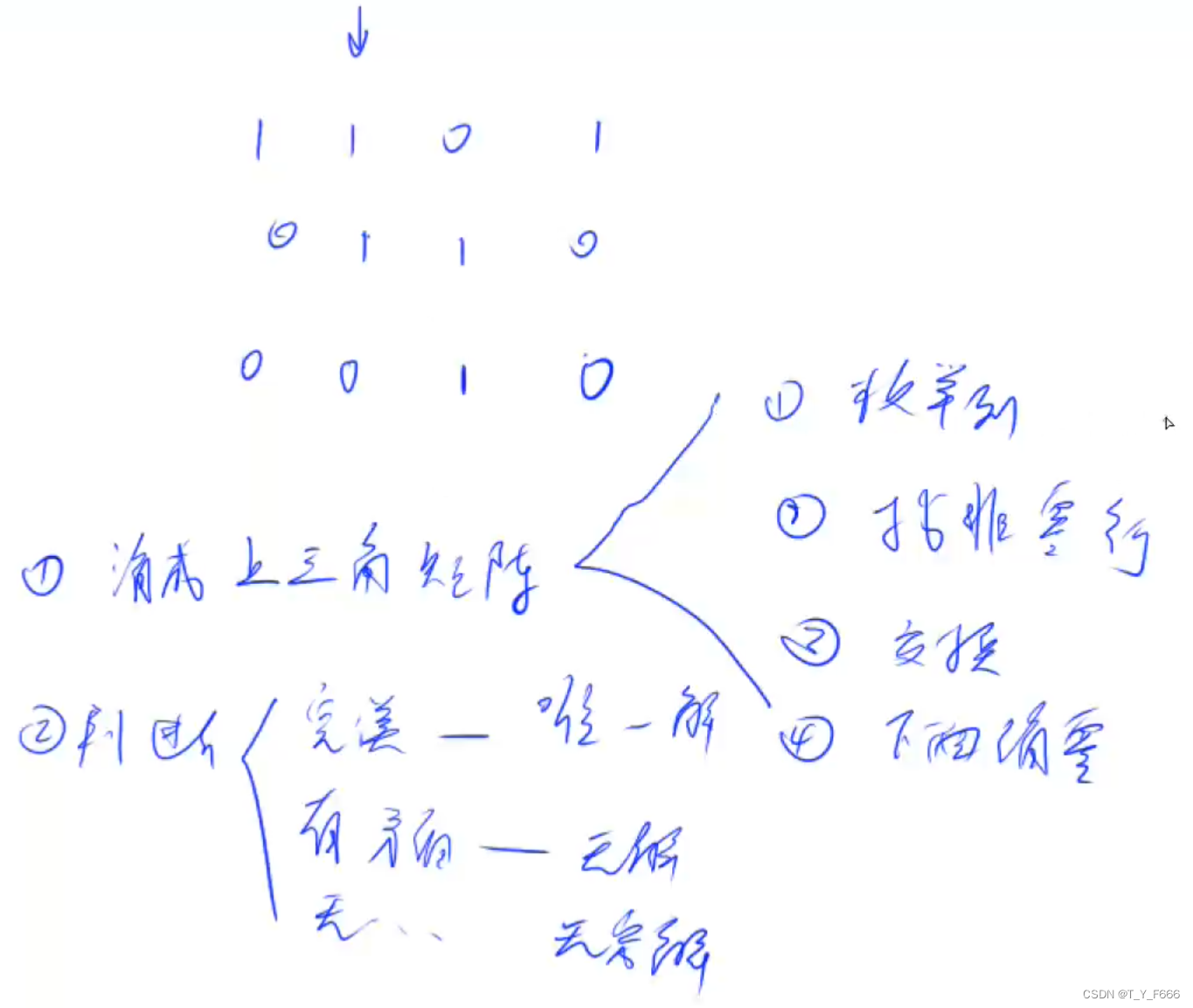
Gauss Cancellation acwing 884. Solution d'un système d'équations Xor linéaires par élimination gaussienne
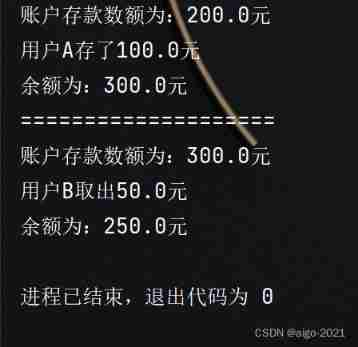
Suppose a bank's ATM machine, which allows users to deposit and withdraw money. Now there is 200 yuan in an account, and both user a and user B have the right to deposit and withdraw money from this a
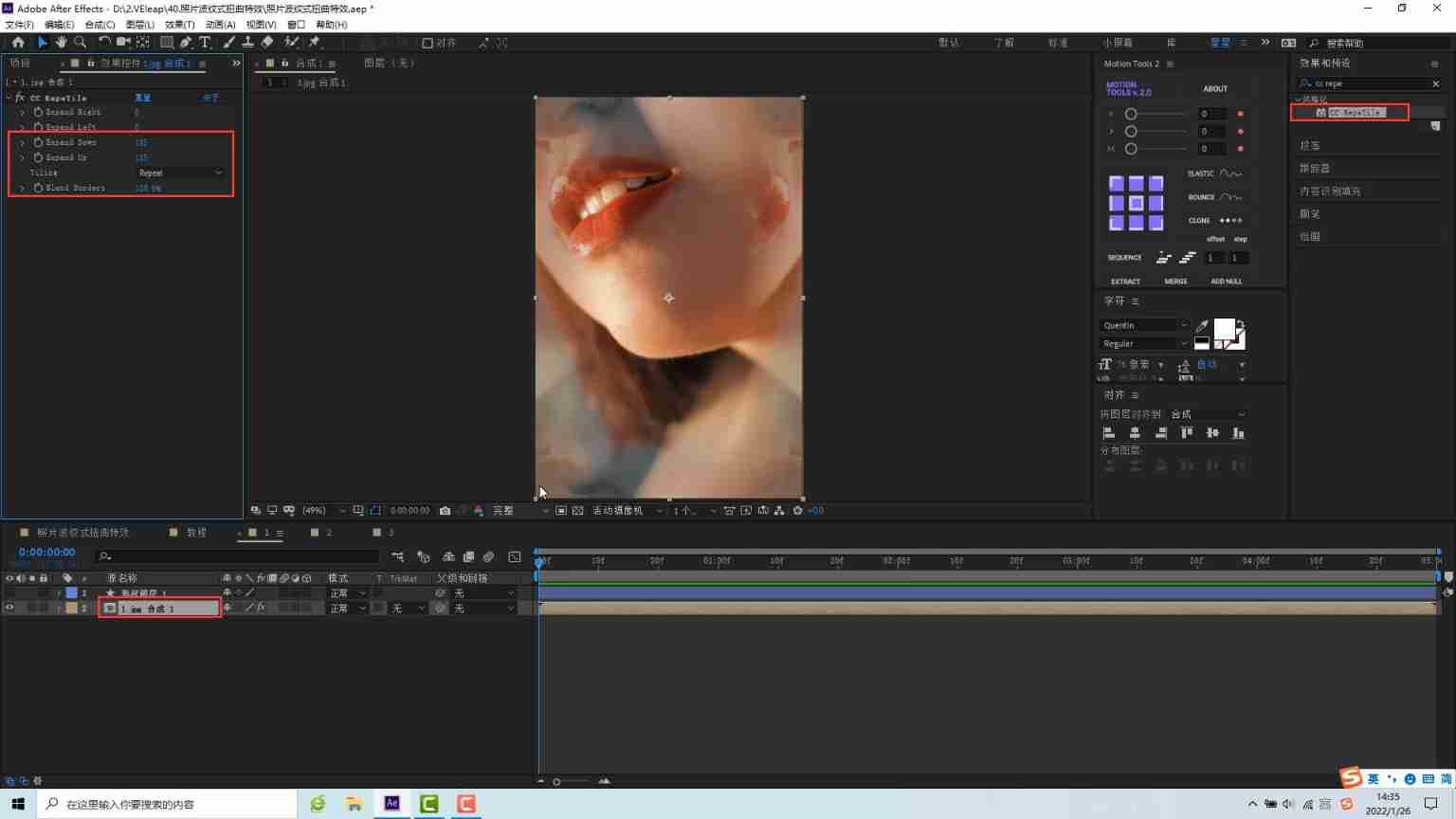
How to make water ripple effect? This wave of water ripple effect pulls full of retro feeling
随机推荐
Redis-01.初识Redis
There are three kinds of SQL connections: internal connection, external connection and cross connection
Find the combination number acwing 888 Find the combination number IV
How to generate an image from text on fly at runtime
博弈论 AcWing 891. Nim游戏
Ffmpeg build download (including old version)
Sum of three terms (construction)
博弈论 AcWing 892. 台阶-Nim游戏
数据库Mysql全部
ollvm编译出现的问题纪录
How to understand the definition of sequence limit?
2048项目实现
Design specification for mobile folding screen
7.Oracle-表结构
C job interview - casting and comparing - C job interview - casting and comparing
[2021]GIRAFFE: Representing Scenes as Compositional Generative Neural Feature Fields
Game theory acwing 892 Steps Nim game
June 29, 2022 daily
Game theory acwing 894 Split Nim game
La redirection de l'applet Wechat ne déclenche pas onload