当前位置:网站首页>Px4 multi computer simulation (gazebo)
Px4 multi computer simulation (gazebo)
2022-06-25 23:41:00 【Blue sky】
Version Description :
operating system
The host machine ( Or development machine ):ubuntu server 20.0.04, thinkpad
Target machine ( Airborne computer ):ubuntu server 20.0.04, Shumei school 3b+
Flight control software :px4 autopilot 1.11.3
Simulation software :gazebo 9
Application software running environment :mavsdk
mavlink Data flow routing software :mavlink-router
The first part , Flight control application and gazebo The software simulation environment runs on the same machine
Flight controller software (PX4 Autopilot)
Simulation software (gazebo)
Flight control application software ,MAVSDK Running environment and application
All the above software runs in one machine , Here is thinkpad+ubuntu server.
1. Start on the development machine gazebo Software simulation environment
stay PX4-Autopilot Execute command under directory :
$./Tools/gazebo_sitl_multiple_run.sh -w baylands
gazebo Three four axis aircrafts appear in the simulation graphical interface
2. Launch the flight control application on the development aircraft
stay MAVSDK/examples/takeoff_land/build Execute command under directory
$./takeoff_and_land udp://:14540
from gazebo The first plane can be seen taking off in the simulation graphical interface 、 hover 、 land
stay MAVSDK/examples/multiple_drones/build Execute command under directory
$./multiple_drones udp://:14540 udp://:14541 udp://:14542
from gazebo You can see in the simulation graphical interface 3 Planes take off in turn 、 hover 、 land
The second part . The simulation environment runs on the host computer and the flight control application software runs on the Shumei school
here , The target plane is Shumei sect , It works with the host computer thinkpad Has passed between wifi The router has established a connection , And you can thinkpad On the computer through ssh Log in to Shumei sect remotely .
1. Same as the first part , Start on the host first gazebo Software simulation environment .
2. Establish a relationship between the host computer and the Shumei sect mavlink route
In the host mavlink_router Execute command under directory :
./mavlink-routerd -e 192.168.3.18:14540 0.0.0.0:14540
This order will gazebo The first aircraft used in the simulation environment udp Speak with what will be executed takeoff_and_land Application's udp Mouth to mouth ( Route up ).
Modify the parameters in the above command 14540 by 14541 It corresponds to the second plane ,14542 It corresponds to the third plane .
3. Run the flight control application on Shumei pie
stay MAVSDK/examples/takeoff_land/build Under the table of contents
Take off first command :./takeoff_and_land udp://:14540
Take off the second command :./takeoff_and_land udp://:14541
Take off the third command :./takeoff_and_land udp://:14542
stay MAVSDK/examples/multiple_drones/build Under the table of contents
Take off in turn 3 An order to fly a plane :
$./multiple_drones udp://:14540 udp://:14541 udp://:14542
边栏推荐
- Style setting when there is a separator in the qcombobox drop-down menu
- 分享一个OSGeo4W64下载好的库,基于qgis3.10的
- Analysis on the control condition and mode of go cooperation overtime exit
- Beacon realizes asset management and indoor positioning based on 5.2 ultra-low power Bluetooth module efr32 (bg22ax)
- 二进制、16进制、大端小端
- 213.打家劫舍 II
- 先序线索二叉树
- 实例:用C#.NET手把手教你做微信公众号开发(21)--使用微信支付线上收款:H5方式
- Pointer strengthening and improvement
- Efr32bg22 ble module (low power Bluetooth communication module) at command test
猜你喜欢








随机推荐
hiberate实体类CURD、事务操作汇总
Informatics Orsay all in one 1353: expression bracket matching | Luogu p1739 expression bracket matching
为什么Integer的比较最好使用equals
Reproduction of an implant found by Kaspersky that writes shellcode into evenlog
WordPress
[Axi] interpretation of Axi protocol disorder mechanism
C2. k-LCM (hard version)-Codeforces Round #708 (Div. 2)
对卡巴斯基发现的一个将shellcode写入evenlog的植入物的复现
Download the latest V80 version of Google Chrome
OBS-Studio-27.2.4-Full-Installer-x64. Exe Download
phoenix索引
二叉排序树
Day4 branch and loop summary and operation
Analysis on resource leakage /goroutine leakage / memory leakage /cpu full in go
qtcreator 格式化代码
解决TypeError: Unicode-objects must be encoded before hashing
UE4 learning record 2 adding skeleton, skin and motion animation to characters
hiberate架构介绍及环境搭建(非常详细)
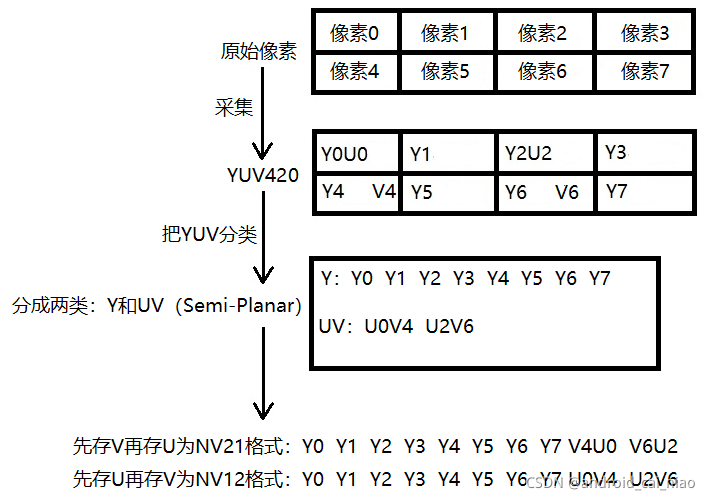
YUV444、YUV422、YUV420、YUV420P、YUV420SP、YV12、YU12、NV12、NV21
String对象(常量)池