当前位置:网站首页>Contribution of Writing Series
Contribution of Writing Series
2022-07-07 02:42:00 【patrickpdx】
example 1. Unlike most of the existing works that consider the sensing and transmission for one task as a unit optimization objective, we further study the time consumption trade-off between the sensing and communication in the cellular Internet of UAVs. stay contribution Before , Through literature review, it is proved that the previous work does have deficiencies in the points we need to innovate
The main contributions of this paper are summarized as follows. First, we propose a model of the cellular Internet of UAVs, where a UAV updates the data for the sensing tasks frequently in a given period. ( What model was studied ) Second, we formulate a joint sensing and transmission optimization problem to minimize the total AoI of the system, and solve the NP-hard problem with gradient descent and dynamic programming (DP) algorithms. ( problem + Method )Third, we prove that there exists only one optimal trade-off between the time for UAV sensing and that for UAV transmission, and verify the effectiveness of our proposed algorithm with simulations.( Simulation results )
Excerpt from S. Zhang, H. Zhang, L. Song, Z. Han and H. V. Poor, “Sensing and Communication Tradeoff Design for AoI Minimization in a Cellular Internet of UAVs,” ICC 2020 - 2020 IEEE International Conference on Communications (ICC), 2020, pp. 1-6, doi: 10.1109/ICC40277.2020.9148771.
example 2. However, the above work only focused on UAV-assisted wireless communications where UAVs are dispatched as dedicated communication platforms … In fact, energy-efficient data uploading via trajectory and communication design for cellular-connected UAV systems with QoS constraints should balance the tradeoff between maximizing data uploading throughput, satisfying communication QoS requirement, and efficiently utilizing the limited on-board energy. Such joint design is challenging, which, to our best knowledge, has not been studied in prior work.
stay contribution Before , Through literature review, it is proved that the previous work does have deficiencies in the points we need to innovate
In this paper, we aim to overcome the above limitations in the existing designs for UAV communication systems. We consider a cellular-connected UAV system where one energy-constrained UAV flies from an initial location to a final location, while uploading its data to the cellular network subject to a given QoS requirement. We assume that only the statistical channel distribution information (CDI) is available prior to the UAV’s flight, while the instantaneous channel state information (CSI) is available to the UAV in real time along the UAV’s flight.( Model ) Our aim is to maximize the total data uploading throughput by jointly optimizing the UAV operation time, communication scheduling, as well as UAV trajectory and transmit power, where both offline and online design approaches are studied. ( problem )The main contributions of this paper are summarized as follows:
• First, we formulate the uplink throughput maximization problemfor a cellular-connected UAV communication systemvia jointly optimizing the UAV operation time, communication scheduling, as well as UAV trajectory and transmit power, by taking into account the UAV energy budget and communication QoS requirement between the UAV and GBSs along its flight.
Model + problem
• Second, we focus on the offline design approach for the considered system by utilizing only the CDI knowledge that is available prior to the UAV’s flight. After defining the adopted performance metric and using path discretization technique, we formulate the design as a non convex optimization problem, which is difficult to solve directly. An efficient alternating optimization algorithm is then proposed to simultaneously update UAV velocity and time slot duration, as well as communication time and transmit power allocation at each iteration with successive convex approximation (SCA) technique, which converges to a solution that satisfies the Karush-KuhnTucker (KKT) conditions.
Method
• Third, we study the online design for the considered system by utilizing the instantaneous CSI obtained by the UAV in real time along its flight. An adaptive online optimization algorithm is proposed, by exploiting the similar structure between the online and offline design problems. To further reduce the computational complexity, a low complexity online algorithm based on receding horizon optimization (RHO) is developed by utilizing a combined offline and online design approach.
Method
• Extensive simulations are conducted and the results show that significant throughput improvement can be achieved by proposed designs compared to baseline schemes. Furthermore, our results unveil the tradeoff between system throughput and UAV endurance in the considered system.
Excerpt from Zhan, Cheng, and Yong Zeng. “Energy-Efficient Data Uploading for Cellular-Connected UAV Systems.” IEEE Transactions on Wireless Communications 19.11 (2020): 7279-7292.
example 3. In this paper, we investigate air-ground coordinated communications system in which both UAV-BS trajectories and GU access control are optimized to further improve the system performance. ( Model )This is different from most previous works [1]– [15], [17]–[19], [24]–[27], [30]–[32] which focus on either UAVs or GUs. ( Argumentation and predecessors do have deficiencies in the points we need to innovate )Specifically, each GU requests to access one UAV-BS to maximize its own throughput and the UAV-BSs( problem )
The main contributions of this paper are summarized as follows:
• We study the air-ground coordinated communications systemwhere the UAV-BS trajectories and GU access control are optimized together instead of just optimizing UAV-BS trajectories or GU access control.
Model + problem
• Based on MADDPG [33], we propose a probabilistic multi-agent deep deterministic policy gradient (PMADDPG) approach to address the problems with hybrid action space. Specifically, PMADDPG transforms the discrete actions into continuous probabilities and samples an action according to the distribution. We then prove the existence of policy gradient, and thus DNN can be optimized in the way of training MADDPG.
Method
• We apply PMADDPG to the air-ground coordinated communications system, and propose AG-PMADDPG (airground PMADDPG) to enable GUs to maximize their own throughput and UAV-BSs to provide fair and highthroughput communication service.
Method
• We analyze the air-ground coordinated communications system from the perspective of game theory. To be specific, we calculate the price of anarchy (POA) [34] of the induced game among competitive GUs and show that the objective would suffer from severe performance loss if GUs learn independently.
result
Excerpt from Ding R, Xu Y, Gao F, et al. Trajectory Design and Access Control for Air-Ground Coordinated Communications System with Multi-Agent Deep Reinforcement Learning[J]. IEEE Internet of Things Journal, 2021.
example 4. Nevertheless, the decentralized trajectory design problem remains to be lack of discussion. This is important since in practical scenarios the UAVs may belong to different entities, and thus they have the incentive to maximize their own utilities.
The main contributions of this paper can be summarized as
follows.
- We propose a sense-and-send protocol to coordinate UAVs performing real-time sensing tasks, and solve the probability of successful valid sensory data transmission by using nested Markov chains.
- We formulate the decentralized UAV trajectory design problem, and propose an enhanced multi-UAV Q-learning algorithm to solve the problem.
- Simulation results show that the enhanced multi-UAV Q-learning algorithm converges faster and to higher rewards of UAVs compared to both single-agent and opponent modeling Q-learning algorithms.
Excerpt from Reinforcement Learning for Decentralized Trajectory Design in Cellular UAV Networks With Sense-and-Send Protocol
边栏推荐
- postgresql 之 数据目录内部结构 简介
- NuScenes数据集关于Radar数据的统计
- Data connection mode in low code platform (Part 1)
- unity webgl自适应网页尺寸
- CSDN 夏令营课程 项目分析
- Lombok同时使⽤@Data和@Builder 的坑
- 用全连接+softmax对图片的feature进行分类
- Matlb| economic scheduling with energy storage, opportunity constraints and robust optimization
- Here comes a white paper to uncover the technology behind Clickhouse, a node with 10000 bytes!
- A new path for enterprise mid Platform Construction -- low code platform
猜你喜欢
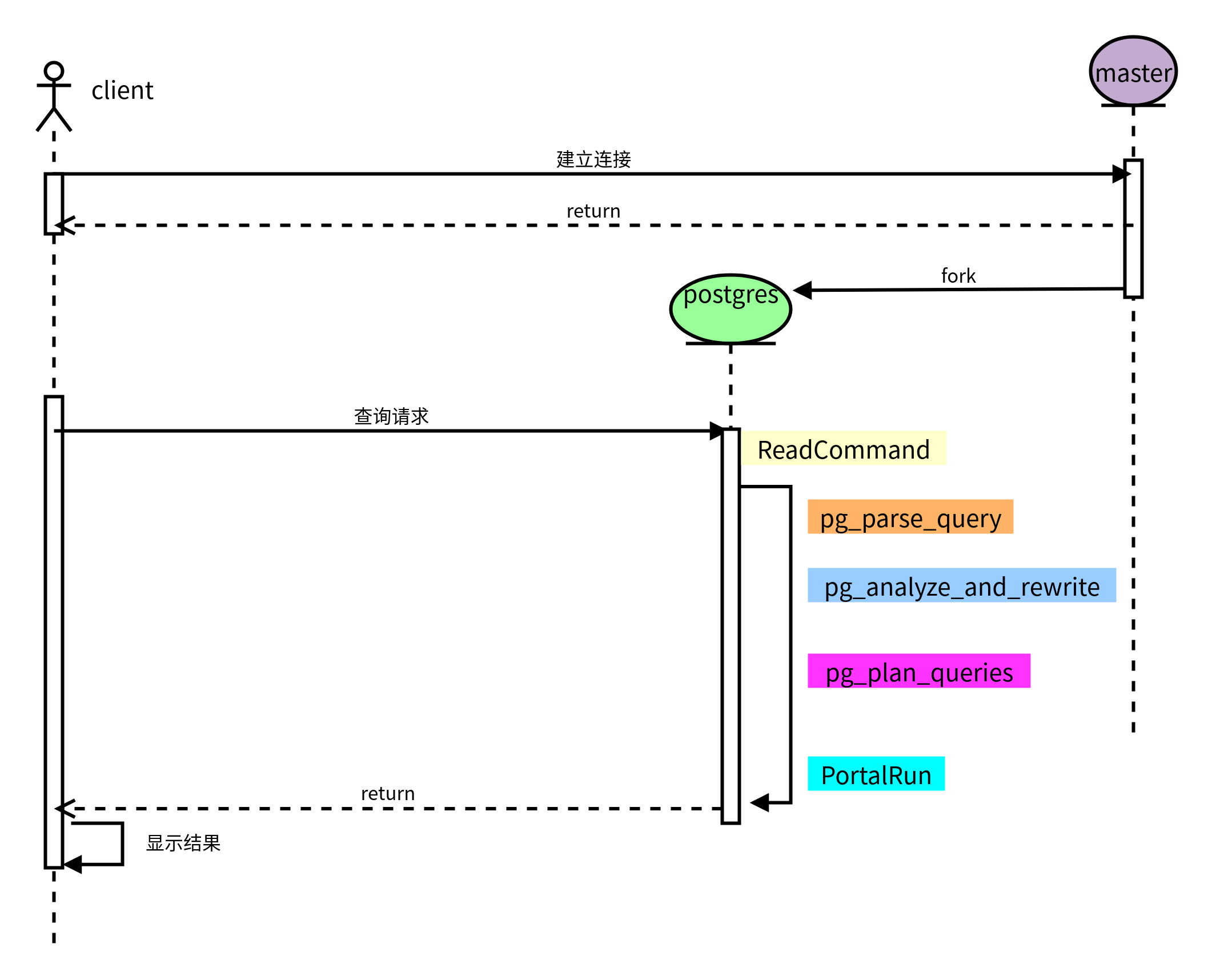
postgresql之整体查询大致过程
Statistics of radar data in nuscenes data set
MySQL - common functions - string functions
C#/VB. Net to delete watermarks in word documents
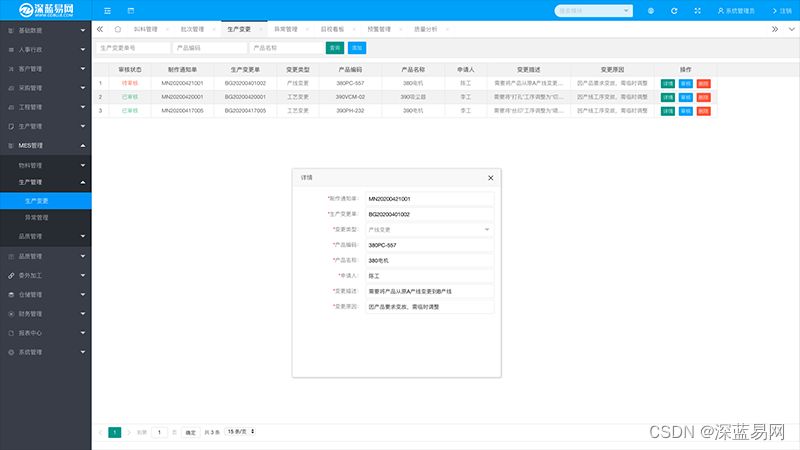
What management points should be paid attention to when implementing MES management system
Niuke programming problem -- double pointer of 101 must be brushed
阿里云易立:云原生如何破解企业降本提效难题?
Increase 900w+ playback in 1 month! Summarize 2 new trends of top flow qiafan in station B
unity 自定义webgl打包模板
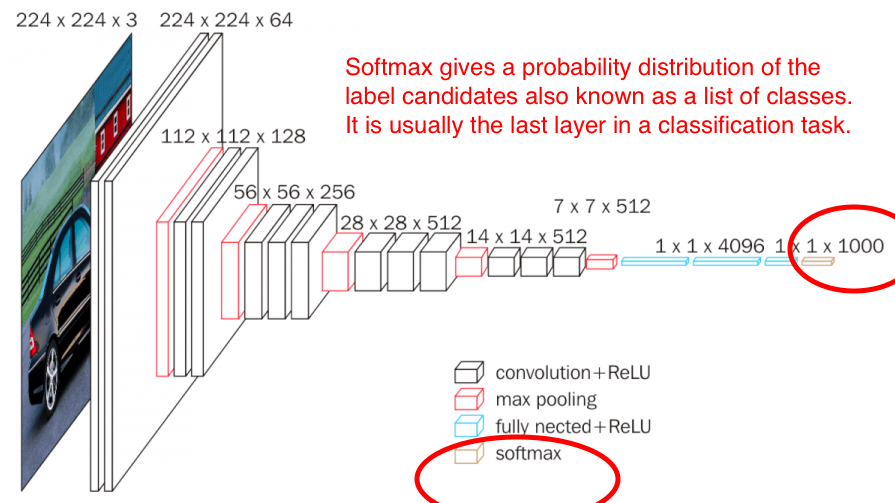
用全连接+softmax对图片的feature进行分类
随机推荐
[Mori city] random talk on GIS data (II)
Station B's June ranking list - feigua data up main growth ranking list (BiliBili platform) is released!
6-6漏洞利用-SSH安全防御
如何设计好接口测试用例?教你几个小技巧,轻松稿定
Integerset of PostgreSQL
Halcon instance to opencvsharp (C openCV) implementation -- bottle mouth defect detection (with source code)
PostgreSQL图形化界面工具之pgAdmin4
安德鲁斯—-多媒体编程
MetaForce原力元宇宙佛萨奇2.0智能合约系统开发(源码部署)
[leetcode]Search for a Range
Ali yunyili: how does yunyuansheng solve the problem of reducing costs and improving efficiency?
Summary of basic debugging steps of S120 driver
Niuke programming problem -- double pointer of 101 must be brushed
Web3对法律的需求
MES管理系统的应用和好处有哪些
Argo workflows source code analysis
MySQL
Use of pgpool II and pgpooladmin
Processus général de requête pour PostgreSQL
NuScenes数据集关于Radar数据的统计