当前位置:网站首页>STM32---ADC
STM32---ADC
2022-07-05 08:16:00 【chen_ bx】
STM32---ADC
ADC Read the port voltage value
Preface
routine : adopt ADC Read PA1 The port collects the voltage value Print through serial port
ADC Input range 2.4V~3.6V Connecting too much voltage will burn the port
Reference self punctual atom
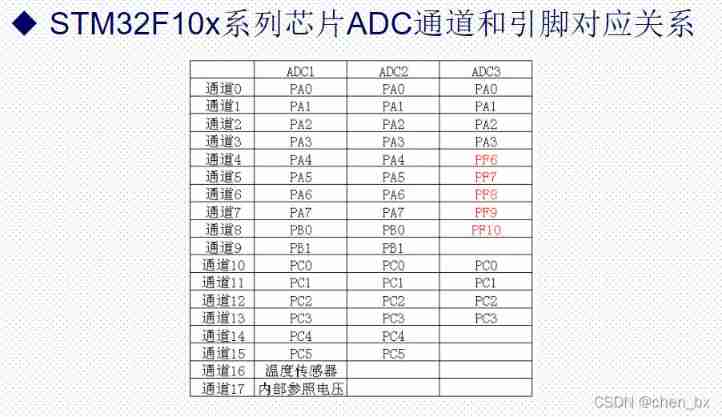
10X series ADC Channel pin relationship
Code
//main.c Code
#include "stm32f10x.h"
#include "usart.h"
#include <stdio.h>
#include "adc.h"
#include "delay.h"
int main(void)
{
u16 adcx;
float temp;
Usart_Init();
delay_init();
Adc_Cfg();
printf("hello,ADC!");
delay_ms(1000);
while(1){
adcx=Get_Adc_Average(ADC_Channel_1,10);
printf("adcx:%d",adcx);
temp=(float)adcx*(3.3/4096);
printf("V:%f",temp);
}
}
//adc.c Code
#include "adc.h"
#include "delay.h"
static void Adc_GPIO_Cfg(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_ADC1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);// frequency division
ADC_DeInit(ADC1);
}
void Adc_Cfg(void)
{
Adc_GPIO_Cfg();
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_ContinuousConvMode=DISABLE;
ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_Mode=ADC_Mode_Independent;
ADC_InitStructure.ADC_NbrOfChannel=1;
ADC_InitStructure.ADC_ScanConvMode=DISABLE;
ADC_Init(ADC1,&ADC_InitStructure);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
// get ADC value
//ch: Value channel 0~3
u16 Get_Adc(u8 ch)
{
// Set the specified ADC The rule group channel for , A sequence , Sampling time
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC passageway , The sampling time is 239.5 cycle
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // Enable to designate ADC1 Software conversion start function
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));// Wait for the conversion to finish
return ADC_GetConversionValue(ADC1); // Go back to the last time ADC1 Conversion result of rule group
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
delay_ms(5);
}
return temp_val/times;
}
//adc.h Code
#ifndef _ADC_H
#define _ADC_H
#include "stm32f10x.h"
void Adc_Cfg(void);
u16 Get_Adc(u8 ch);
u16 Get_Adc_Average(u8 ch,u8 times);
#endif
Serial port print results

adcx:3891
V:3.134V
The port is floating input The read value is 3.134V
PA1 Port connection GND After the ground
adcx:0
V:0V
The port read value is 0V

PA1 Port connection 3.3V after
adcx:4095
V:3.299V
The port read value is 3.299V
ADC Read the internal temperature of the chip
Preface
routine :ADC Read the internal temperature of the chip and output the read temperature value through the serial port
Reference self punctual atom
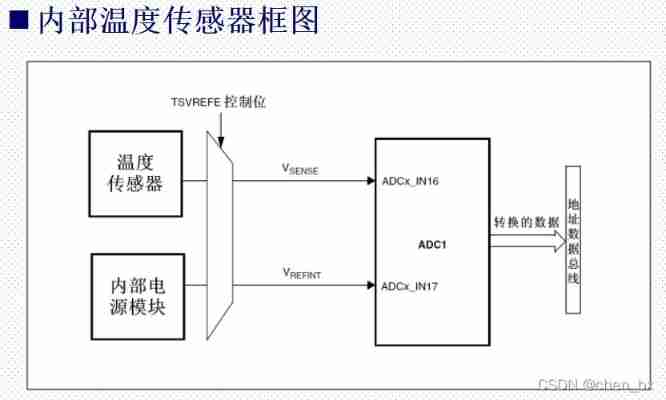
Block diagram of internal temperature sensor
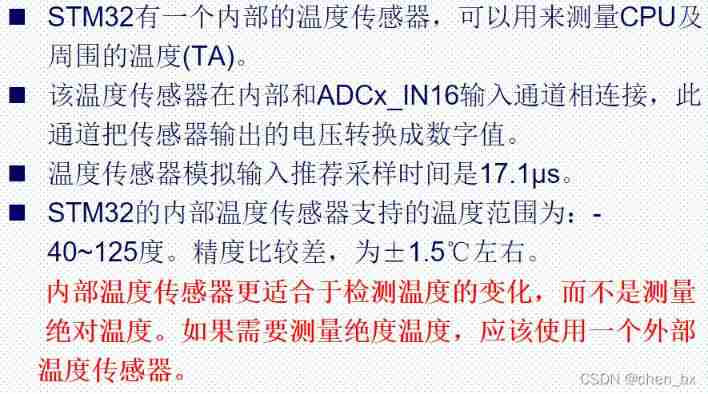
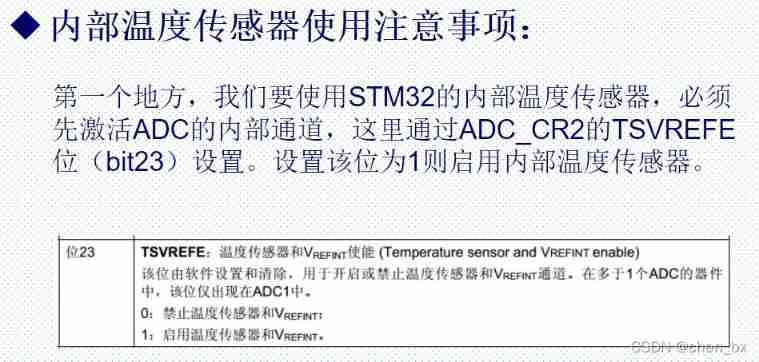
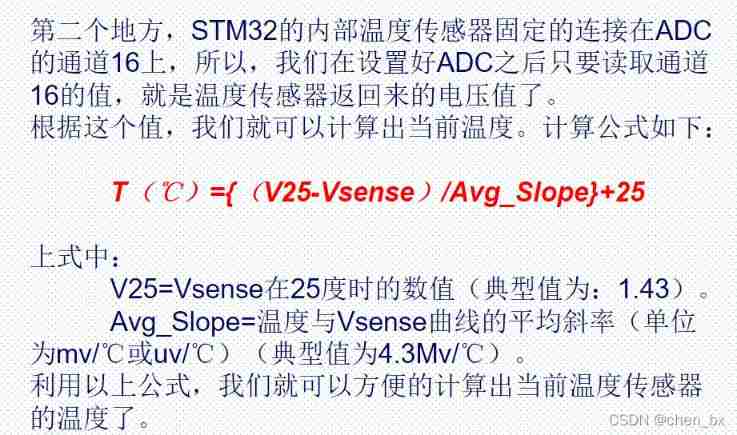
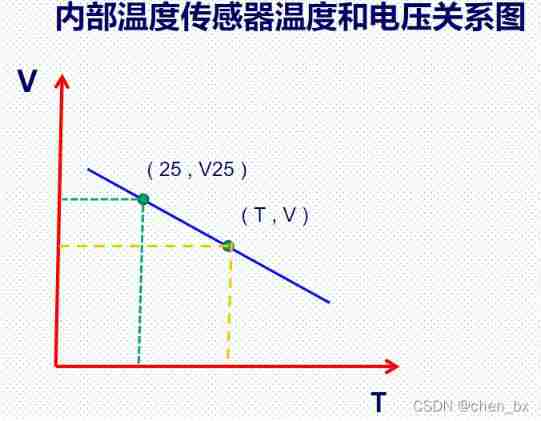
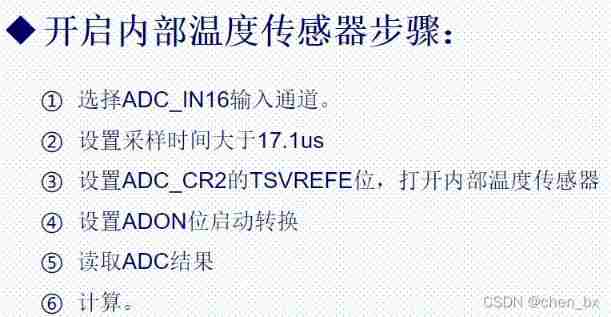
Precautions for use of internal temperature sensor
Code
//main.c Code
#include "stm32f10x.h"
#include "usart.h"
#include <stdio.h>
#include "adc.h"
#include "delay.h"
int main(void)
{
float temp;
Usart_Init();
delay_init();
Adc_Cfg();
printf("hello,ADC!");
delay_ms(1000);
while(1){
temp=Get_Temprate();
printf("temp:%f\n",temp);
}
}
//adc.c Code
#include "adc.h"
#include "delay.h"
static void Adc_GPIO_Cfg(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_ADC1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);// frequency division
ADC_DeInit(ADC1);
}
void Adc_Cfg(void)
{
Adc_GPIO_Cfg();
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_ContinuousConvMode=DISABLE;
ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_Mode=ADC_Mode_Independent;
ADC_InitStructure.ADC_NbrOfChannel=1;
ADC_InitStructure.ADC_ScanConvMode=DISABLE;
ADC_Init(ADC1,&ADC_InitStructure);
ADC_TempSensorVrefintCmd(ENABLE); // Turn on the internal temperature sensor
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
// get ADC value
//ch: Value channel 0~3
u16 Get_Adc(u8 ch)
{
// Set the specified ADC The rule group channel for , A sequence , Sampling time
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC passageway , The sampling time is 239.5 cycle
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // Enable to designate ADC1 Software conversion start function
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));// Wait for the conversion to finish
return ADC_GetConversionValue(ADC1); // Go back to the last time ADC1 Conversion result of rule group
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
delay_ms(5);
}
return temp_val/times;
}
// Get the temperature value
// Return value : Temperature value ( Expanded 100 times , Company :℃.)
double Get_Temprate(void) // Obtain the temperature value of the internal temperature sensor
{
u32 adcx;
double result;
double temperate;
adcx=Get_Adc_Average(ADC_Channel_16,20); // Read channel 16,20 Average the times
temperate=(float)adcx*(3.3/4096); // Voltage value
result=(1.43-temperate)/0.0043+25; // Convert to temperature value
return result;
}
//adc.h Code
#ifndef _ADC_H
#define _ADC_H
#include "stm32f10x.h"
void Adc_Cfg(void);
u16 Get_Adc(u8 ch);
u16 Get_Adc_Average(u8 ch,u8 times);
double Get_Temprate(void);
#endif
Serial port print results

边栏推荐
- Management and use of DokuWiki (supplementary)
- MySQL MHA high availability cluster
- Why is 1900 not a leap year
- Brief discussion on Buck buck circuit
- Factors affecting the quality of slip rings in production
- Detailed summary of FIO test hard disk performance parameters and examples (with source code)
- Shell script realizes the reading of serial port and the parsing of message
- Embedded composition and route
- STM32 outputs 1PPS with adjustable phase
- Measurement fitting based on Halcon learning [i] fuse Hdev routine
猜你喜欢
![C WinForm [change the position of the form after running] - Practical Exercise 4](/img/f7/ddaf5773295ca6929d39d7aa760d36.jpg)
C WinForm [change the position of the form after running] - Practical Exercise 4
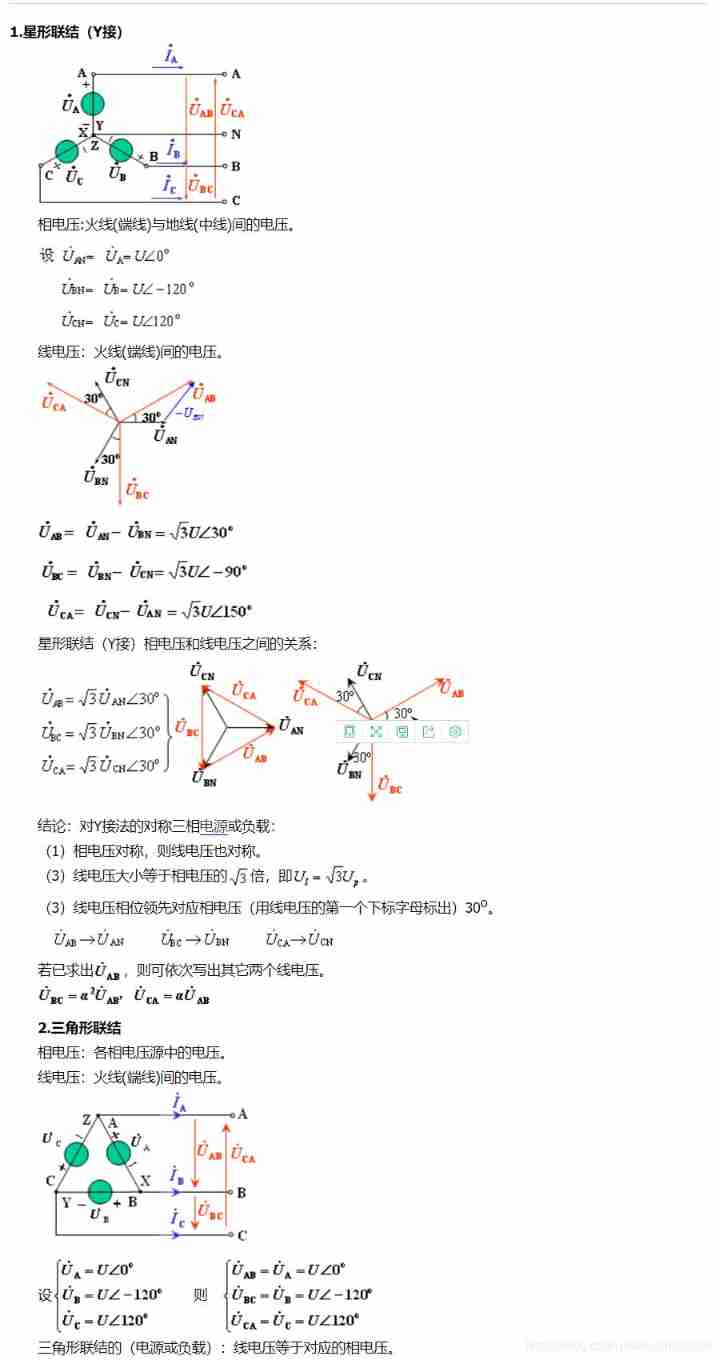
Relationship between line voltage and phase voltage, line current and phase current
Improve lighting C program

STM32 single chip microcomputer - external interrupt

Simple design description of MIC circuit of ECM mobile phone

Design a clock frequency division circuit that can be switched arbitrarily
Arduino uses nrf24l01+ communication
More than 90% of hardware engineers will encounter problems when MOS tubes are burned out!
![Measurement fitting based on Halcon learning [III] PM_ measure_ board. Hdev routine](/img/f9/fc4f0bbce36b3c1368d838d723b027.jpg)
Measurement fitting based on Halcon learning [III] PM_ measure_ board. Hdev routine

MySQL MHA high availability cluster
随机推荐
C language enhancement -- pointer
C WinForm [change the position of the form after running] - Practical Exercise 4
Buildroot system for making raspberry pie cm3
Imx6ull bare metal development learning 2- use C language to light LED indicator
VESC Benjamin test motor parameters
Why is 1900 not a leap year
PMSM dead time compensation
OLED 0.96 inch test
Factors affecting the quality of slip rings in production
STM32 --- configuration of external interrupt
Management and use of DokuWiki (supplementary)
Arduino uses nrf24l01+ communication
C WinForm [realize the previous and next selection pictures] - practice 7
Working principle and type selection of common mode inductor
C # joint configuration with Halcon
Talk about the circuit use of TVs tube
Synchronization of QT multithreading
go依赖注入--google开源库wire
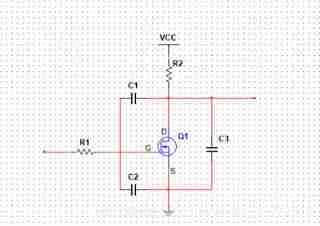
Classic application of MOS transistor circuit design (1) -iic bidirectional level shift
Let's briefly talk about the chips commonly used in mobile phones - OVP chips