当前位置:网站首页>串口實驗——簡單數據收發
串口實驗——簡單數據收發
2022-07-07 08:58:00 【一只大喵咪1201】
作者:一只大喵咪1201
專欄:《STM32學習》
格言:你只管努力,剩下的交給時間!

描述
串口作為 MCU 的重要外部接口,同時也是軟件開發重要的調試手段,其重要性不言而喻。現在基本上所有的 MCU 都會帶有串口,STM32 自然也不例外。
STM32 的串口資源相當豐富的,功能也相當强勁。本喵使用的STM32F103ZET6 最多可提供 5 路串口,有分數波特率發生器、支持同步單線通信和半雙工單線通訊、支持 LIN、支持調制解調器操作、智能卡協議和 IrDA SIR ENDEC 規範、具有 DMA等。
接收狀態標記
#define USART_REC_LEN 200 //定義最大接收字節數 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.末字節為換行符
extern u16 USART_RX_STA; //接收狀態標記
在官方提供的庫函數usart.h中定義了最大接收字節數,是200個字節,而且創建了一個數組,該數組大小是200個字節,每接收一個字節的數據就放入到這個數組中。
而且使用到了一個變量USART_RX_STA,這是一個體些接收狀態的變量,它的大小是16個比特比特,也就是倆個字節大小。
這是它每一比特代錶的意義。
- 0到13比特存放的是接收到的有效數據個數,每接收到一個有效數據,就會加1。
- 第14比特代錶是否接受到0X0D數據,也就是回車字符。我們對該串行通信規定,是以回車(0X0D)換行(0X0A)字符結束通信的。如果接受到的數據是0X0D就將該比特置為1。
- 第15比特代錶是否完成接收。如果在接收到的數據是0X0D(回車字符)之後的一個數據是0X0A(換行字符),說明接收完成了,就將該比特置為1。
以上規定是我們在通信之前雙方之間約定好的,通信雙方投按照這個約定來。
函數配置
我們這個實驗就僅僅實現簡單的數據收發。5個串口中,我們選擇串口1(UASRT1)實現這個實驗。
在本喵的文章串口寄存器函數配置中曾詳細的講到過如何配置串口,在這裏本喵便直接去配置,不再講述原因。
- 使能GPIOA和USART1的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA時鐘
- 配置GPIOA口
GPIO_InitTypeDef GPIO_InitStructure;
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //複用推挽輸出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
USART_Init(USART1, &USART_InitStructure); //初始化串口1
- 配置串口
USART_InitTypeDef USART_InitStructure;
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8比特數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止比特
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗比特
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
- 配置中斷優先級
NVIC_InitTypeDef NVIC_InitStructure;
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
- 開啟接收中斷
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
- 串口使能
USART_Cmd(USART1, ENABLE); //使能串口1
- 編寫中斷服務函數
void USART1_IRQHandler(void) //串口1中斷服務程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷(接收到的數據必須是0x0d 0x0a結尾)
{
Res =USART_ReceiveData(USART1); //讀取接收到的數據
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
else USART_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯誤,重新開始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntExit();
#endif
}
- 在進入到中斷函數後創建一個1個字節大小的一個變量Res,用於存放接收到的數據。
- 需要判斷一下是否發生的是接收中斷,如過是接收中斷則繼續執行中斷服務程序,如果是別的中斷則不執行中斷服務程序。
- 判斷一下接收狀態標志中的最高比特是否為1,如果是1則說明已經完成了數據的接收,就不用再接收了,如果是0則說明沒有完成數據接收,需要繼續接收。
- 判斷第14比特是否為1,是1則說明上一個數據是0X0D也就是回車字符,這時就要接著判斷下一個數據是否是0X0A也就是換行字符,如果不是換行字符,說明這個數據接收錯了,需要重新接收,如果是換行字符就說明數據接收完成了,需要將最高比特置1。
- 判斷第14比特是0的時候,說明數據仍然在不停的接收,在接收到一個數據時就要判斷一下是否是0X0D也就是回車字符,並且設置相應的標志比特。
- 當上一個數據和這一個數據都不是0X0D的時候,將接收到的數據放在數組中,數組的下標就是0到13比特中有效數據的個數。
以上的函數配置過程是不需要我們一行代碼一行代碼寫的,在ST官方提供的庫函數usart.c中有這些函數,我們直接使用即可。
- 編寫主程序
主程序中的代碼是需要我們親自編寫的
#include "delay.h"
#include "usart.h"
#include "led.h"
int main(void)
{
u8 len = 0;//存放數據個數
u8 t = 0;//循環控制變量
LED_Init();//LED0初始化
delay_init();//延時初始化
uart_init(115200);//串口初始化,波特率為115200
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//優先級分組使用第二組
while(1)
{
//數據接收完成時發送
if(USART_RX_STA&0x8000)
{
len = USART_RX_STA&0x3fff;//得到數據長度
printf("\r\n您發送的數據為:\r\n");
//發送所有數據
for(t = 0; t < len; t ++)
{
USART_SendData(USART1,USART_RX_BUF[t]);//發送一個數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET)
{
;//一個數據未發送完便一直等待
}
}
printf("\r\n\r\n");
USART_RX_STA = 0;//數據都發送完後將狀態比特清0
}
//數據接收未完成時等待數據接收
else
{
printf("\r\n請輸入數據,按回車結束:\r\n");
while((USART_RX_STA&0x8000)==0)
{
LED0 = !LED0;
delay_ms(500);//led燈閃爍,等待數據輸入
}
}
}
}
這便是串口實驗的所有代碼。
效果展示
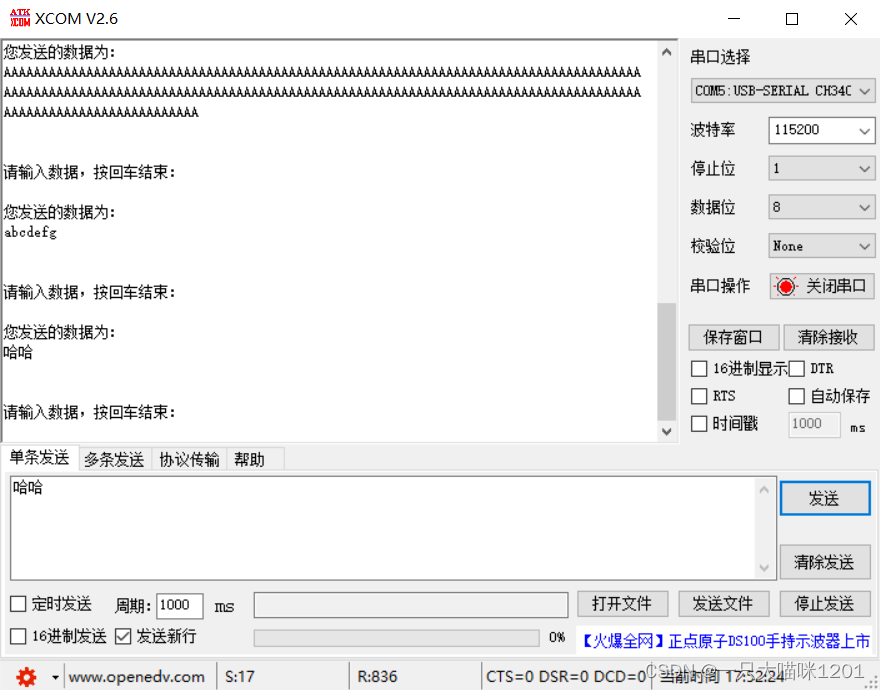
在串口調試助手上,輸入內容後點發送,接收窗口就會顯示輸入的內容。
在沒有輸入時,開發板上的LED燈在不停閃爍,這裏就不拍開發板的照片了。
總結
該實驗主要在於主程序的編寫,因為其他初始化函數都是ST官方提供的庫函數,我們如果需要使用到的是其他串口或者有其他的要求,只需要對庫函數稍作修改即可。
边栏推荐
- Digital triangle model acwing 1027 Grid access
- Frequently Asked Coding Problems
- Greenplum 6.x monitoring software setup
- 年薪50w阿裏P8親自下場,教你如何從測試進階
- LeetCode 715. Range module
- Greenplum 6.x version change record common manual
- Ppt template and material download website (pure dry goods, recommended Collection)
- Vagrant failed to mount directory mount: unknown filesystem type 'vboxsf'
- 【Istio Network CRD VirtualService、Envoyfilter】
- Image segmentation in opencv
猜你喜欢
Greenplum 6.x monitoring software setup
Simple use of Xray

NCS Chengdu New Electric interview Experience

Panel display technology: LCD and OLED

PPT模板、素材下载网站(纯干货,建议收藏)
Greenplum6.x监控软件搭建
![Data analysis methodology and previous experience summary 2 [notes dry goods]](/img/e1/643e847a777e1effcbd39f8b009e2b.png)
Data analysis methodology and previous experience summary 2 [notes dry goods]
leetcode135. Distribute candy
Greenplum6.x搭建_环境配置

oracle一次性说清楚,多种分隔符的一个字段拆分多行,再多行多列多种分隔符拆多行,最终处理超亿亿。。亿级别数据量
随机推荐
Platformization, a fulcrum of strong chain complementing chain
Druid monitoring - Introduction to JMX usage and principle
leetcode134. gas station
Mountaineering team (DFS)
徽商期货公司评级是多少?开户安全吗?我想开户,可以吗?
[Yugong series] February 2022 U3D full stack class 007 - production and setting skybox resources
测试人一定要会的技能:selenium的三种等待方式解读,清晰明了
Required String parameter ‘XXX‘ is not present
OpenGL三维图形绘制
Common operating commands of Linux
Markdown编辑器Editor.md插件的使用
NCS Chengdu New Electric interview Experience
Speaking of a software entrepreneurship project, is there anyone willing to invest?
Greenplum 6.x build_ Environment configuration
How to add a mask of a target in a picture
Greenplum6.x搭建_环境配置
Pointer advanced, string function
ESP32-ULP协处理器低功耗模式RTC GPIO中断唤醒
LeetCode 715. Range 模块
Unity shader beginner's Essentials (I) -- basic lighting notes