当前位置:网站首页>潘多拉 IOT 开发板学习(HAL 库)—— 实验2 蜂鸣器实验(学习笔记)
潘多拉 IOT 开发板学习(HAL 库)—— 实验2 蜂鸣器实验(学习笔记)
2022-07-02 03:36:00 【小辉_Super】
本文代码参考正点原子例程
实验功能
例程源码:(main.c)
该实验实现了蜂鸣器的不停鸣叫,和 LED 实验一样,主要涉及的知识点是操作 GPIO。
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "beep.h"
/********************************************************************************* ___ _ _____ _____ _ _ _____ _____ _ __ / _ \ | | |_ _|| ___|| \ | ||_ _|| ___|| | / / / /_\ \| | | | | |__ | \| | | | | |__ | |/ / | _ || | | | | __| | . ` | | | | __| | \ | | | || |_____| |_ | |___ | |\ | | | | |___ | |\ \ \_| |_/\_____/\___/ \____/ \_| \_/ \_/ \____/ \_| \_/ * ****************************************************************************** * 正点原子 Pandora STM32L475 IoT开发板 实验2 * 蜂鸣器实验 HAL库版本 * 技术支持:www.openedv.com * 淘宝店铺:http://openedv.taobao.com * 关注微信公众平台微信号:"正点原子",免费获取STM32资料。 * 广州市星翼电子科技有限公司 * 作者:正点原子 @ALIENTEK * ******************************************************************************/
int main(void)
{
HAL_Init();
SystemClock_Config(); //初始化系统时钟为80M
delay_init(80); //初始化延时函数 80M系统时钟
LED_Init(); //初始化LED
BEEP_Init(); //初始化蜂鸣器
while(1)
{
BEEP(1);
delay_ms(500);
BEEP(0);
delay_ms(1000);
}
}
代码剖析
HAL_Init()
HAL_Init() 定义如下:(具体实现的功能见注释)
HAL_StatusTypeDef HAL_Init(void)
{
HAL_StatusTypeDef status = HAL_OK;
/* 配置 Flash 预取,指令缓存,数据缓存 */
/* 默认配置为:预存取关闭 指令缓存和数据缓存开启 */
#if (INSTRUCTION_CACHE_ENABLE == 0) // Flash开启预存取配置,能加速CPU代码的执行
__HAL_FLASH_INSTRUCTION_CACHE_DISABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE == 0)
__HAL_FLASH_DATA_CACHE_DISABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_2); // 配置 NVIC 优先级分组
/* Use SysTick as time base source and configure 1ms tick (default clock after Reset is MSI) */
if (HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK) //初始化滴答定时器,时钟节拍设置为 1ms
{
status = HAL_ERROR;
}
else
{
/* Init the low level hardware */
HAL_MspInit(); // 低速的外设初始化,比如 GPIO、中断等的设置(使用 STM32CubeMx 生成代码时会将低速外设初始
// 代码当这类函数里,其他情况下可以忽略这个函数
}
/* Return function status */
return status;
}
HAL_InitTick()
滴答定时器时钟节拍初始化函数
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_StatusTypeDef status = HAL_OK;
/*Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock/1000UL) != 0U) // 系统时钟/1000,中断周期为 1ms
{
status = HAL_ERROR;
}
else
{
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0); // 将滴答定时器的中断优先级设置为最高
}
/* Return function status */
return status;
}
SystemClock_Config()
SystemClock_Config()函数定义如下:(具体实现的功能见注释,仅供参考)
void SystemClock_Config(void)
{
HAL_StatusTypeDef ret = HAL_OK;
RCC_OscInitTypeDef RCC_OscInitStruct; // 定义振荡器初始化结构体变量
RCC_ClkInitTypeDef RCC_ClkInitStruct; // 定义时钟初始化结构体变量
__HAL_RCC_PWR_CLK_ENABLE(); // 使能电源控制时钟
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 将 HSE(外部高速时钟)作为时钟源
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // 开启 HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // 开启 PLL(锁相环)
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // 将 HSE 作为 PLL 的时钟源
RCC_OscInitStruct.PLL.PLLM = 1; // PLL-VCO 输入时钟分频系数,1 表示 2 分频(8 / 2 = 4M,本开发板外部晶振频率为 8MHz)
RCC_OscInitStruct.PLL.PLLN = 20; // PLL-VCO 输出时钟倍频系数,4 * 20 = 80M,即输出时钟频率为 80MHz
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7; // SAI 时钟的分频系数
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; // SDMMC1, RNG 和 USB 的时钟分频系数
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; // 主系统时钟的分频系数
ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); //初始化时钟配置
if(ret != HAL_OK) while(1);
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; // 将所有时钟同时进行配置
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 将 PLL 作为系统时钟源
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB 不分频
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // APB1 不分频
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2 不分频
ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4); // 配置时钟初始结构体变量,
//使用 Flash 延迟4,等待状态(延迟)的数量需要根据CPU时钟(HCLK)的频率和内部电压范围来选择,具体怎么
//选需要参考芯片手册
if(ret != HAL_OK) while(1);
/*Configure the main internal regulator output voltage*/
ret = HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1); //内部寄存器输出电压配置
// 下面是 HAL_PWREx_ControlVoltageScaling() 函数说明的部分内容:
//PWR_REGULATOR_VOLTAGE_SCALE1 Regulator voltage output range 1 mode, typical output voltage
// at 1.2 V, system frequency up to 80 MHz.
if(ret != HAL_OK) while(1);
}
delay_init()
滴答定时器已经在 HAL_Init() 中进行了初始化,下面这个函数实际上就是给 fac_us 赋了一个值(目前暂不涉及操作系统,其他代码暂时不去研究)。
static u32 fac_us = 0; //us延时倍乘数
/** * @brief 初始化延迟函数,SYSTICK的时钟固定为AHB时钟 * * @param SYSCLK 系统时钟频率 * * @return void */
void delay_init(u8 SYSCLK)
{
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
u32 reload;
#endif
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick频率为HCLK
fac_us = SYSCLK; //不论是否使用OS,fac_us都需要使用
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
reload = SYSCLK; //每秒钟的计数次数 单位为K
reload *= 1000000 / delay_ostickspersec; //根据delay_ostickspersec设定溢出时间
//reload为24位寄存器,最大值:16777216,在80M下,约209.7ms左右
fac_ms = 1000 / delay_ostickspersec; //代表OS可以延时的最少单位
SysTick->CTRL |= SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD = reload; //每1/OS_TICKS_PER_SEC秒中断一次
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#else
#endif
}
BEEP_Init()
/** * @brief 蜂鸣器 IO初始化函数 * * @param void * * @return void */
void BEEP_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // 定义一个GPIO初始化结构体变量
__HAL_RCC_GPIOB_CLK_ENABLE(); // 使能GPIOE的时钟
//PB2
GPIO_InitStruct.Pin = GPIO_PIN_2; // 设置对应的引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 默认下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 速度设为高速(25 MHz to 50 MHz)
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); // 初始化结构体变量
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET); //将 IO 拉低
}
delay_ms()
delay_ms() 里运行的是 delay_us(), delay_us()通过滴答定时器实现延时。上面的 delay_init() 已经将 fac_us 设置为了 80,滴答定时器计数 80 次需要用 10-6 秒(系统时钟为 80MHz),即 1us。
/** * @brief 延时毫秒(ms)函数 * * @param nms 需要延时多少毫秒 * * @return void */
void delay_ms(u16 nms)
{
u32 i;
for(i = 0; i < nms; i++) delay_us(1000);
}
/** * @brief 延时微秒(us)函数 * * @remark nus:0~190887435(最大值即2^32/[email protected]_us=22.5) * * @param nus 需要延时多少微秒 * * @return void */
void delay_us(u32 nus)
{
u32 ticks;
u32 told, tnow, tcnt = 0;
u32 reload = SysTick->LOAD; //LOAD的值
ticks = nus * fac_us; //需要的节拍数
told = SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow = SysTick->VAL;
if(tnow != told)
{
if(tnow < told)tcnt += told - tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt += reload - tnow + told;
told = tnow;
if(tcnt >= ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
}
BEEP()
蜂鸣器的控制函数是宏函数,分别用到了 HAL_GPIO_WritePin() 和 HAL_GPIO_TogglePin() 两个库函数。
#define BEEP(n) (n?HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET))
#define BEEP_TogglePin HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_2)
边栏推荐
- Global and Chinese market of autotransfusion bags 2022-2028: Research Report on technology, participants, trends, market size and share
- Failed to upgrade schema, error: “file does not exist
- h5中的页面显示隐藏执行事件
- Docker installs canal and MySQL for simple testing and implementation of redis and MySQL cache consistency
- 终日乾乾,夕惕若厉
- On redis (II) -- cluster version
- halcon图像矫正
- Go execute shell command
- aaaaaaaaaaaaa
- aaaaaaaaaaaaa
猜你喜欢

Large screen visualization from bronze to the advanced king, you only need a "component reuse"!
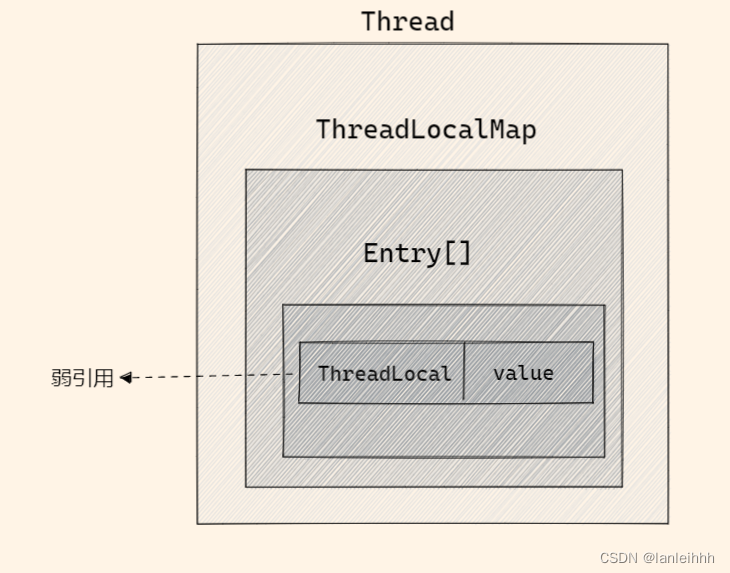
ThreadLocal详解
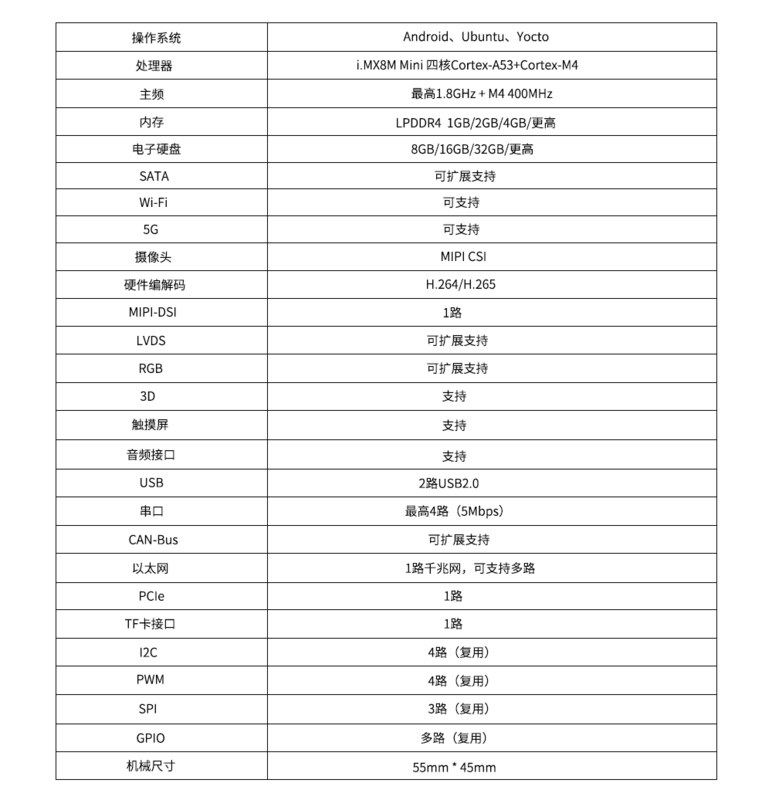
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini

Comment élaborer une stratégie nuageuse à l'ère des nuages mixtes

Named block Verilog

Screenshot literacy tool download and use
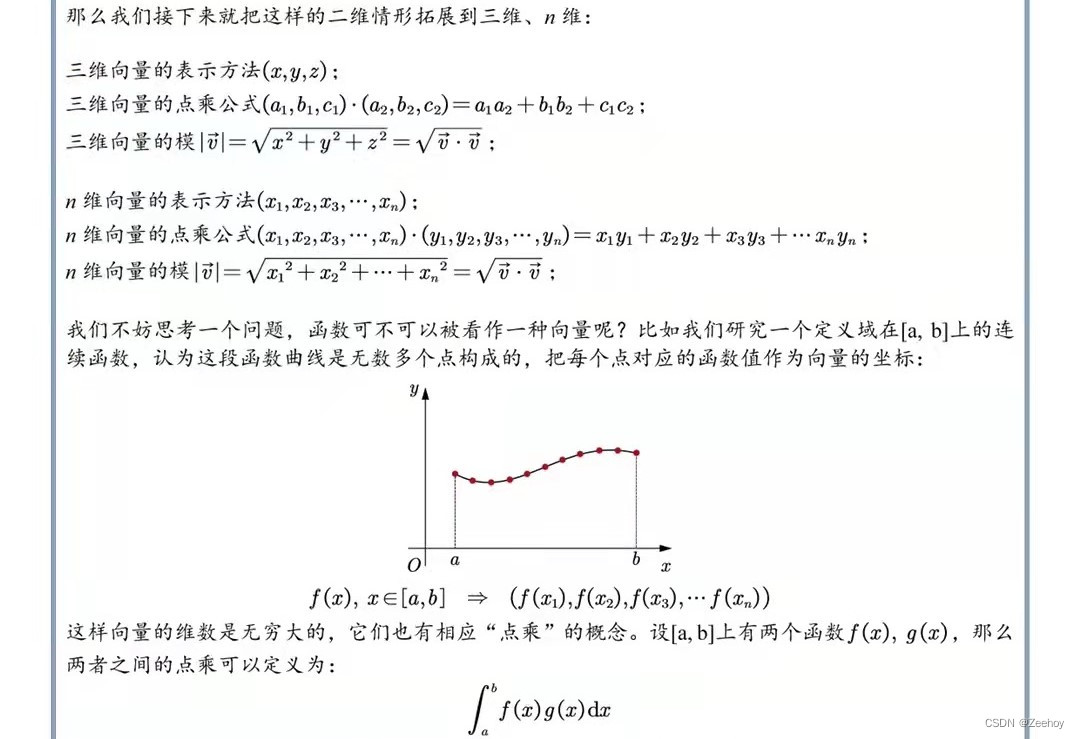
Fourier series
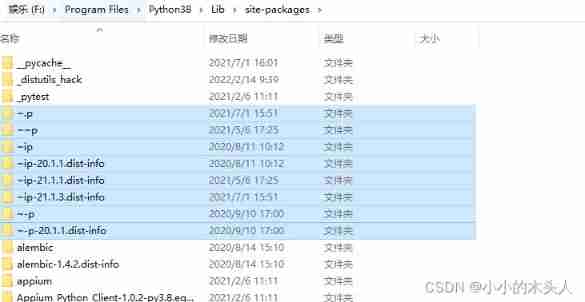
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
初出茅庐市值1亿美金的监控产品Sentry体验与架构

Exchange rate query interface
随机推荐
Aaaaaaaaaaaa
Learn PWN from CTF wiki - ret2shellcode
In the era of programmers' introspection, five-year-old programmers are afraid to go out for interviews
UI (New ui:: MainWindow) troubleshooting
[HCIA continuous update] working principle of OSPF Protocol
Global and Chinese markets for infant care equipment, 2022-2028: Research Report on technology, participants, trends, market size and share
[mv-3d] - multi view 3D target detection network
Detailed explanation of ThreadLocal
halcon图像矫正
venn圖取交集
蓝桥杯单片机省赛第十二届第一场
Load different fonts in QML
蓝桥杯单片机第四届省赛
Global and Chinese market of gynaecological health training manikin 2022-2028: Research Report on technology, participants, trends, market size and share
One of the future trends of SAP ui5: embrace typescript
Detailed explanation of the difference between Verilog process assignment
Gradle foundation | customize the plug-in and upload it to jitpack
NLog use
蓝桥杯单片机省赛第七届
Kotlin基础学习 17