当前位置:网站首页>无刷驱动设计——浅谈MOS驱动电路
无刷驱动设计——浅谈MOS驱动电路
2022-07-05 23:04:00 【小向是个Der】
MOS驱动
前言
上周末,在调试无刷电机驱动的时候总是莫名其妙的炸管,心态都搞没了,实在没办法了只好在CSDN和B站大学重新学习了相关理论知识,以下是笔者学习笔记,仅供参考,如有错误欢迎大家批评指正。
MOS的实际电路模型
MOS作为一个常用器件相信大家都不陌生,有关其分类和原理笔者不做赘述,在模电中老师会教我们如下原理图和符号,缺很少提到带寄生电容的等效模型。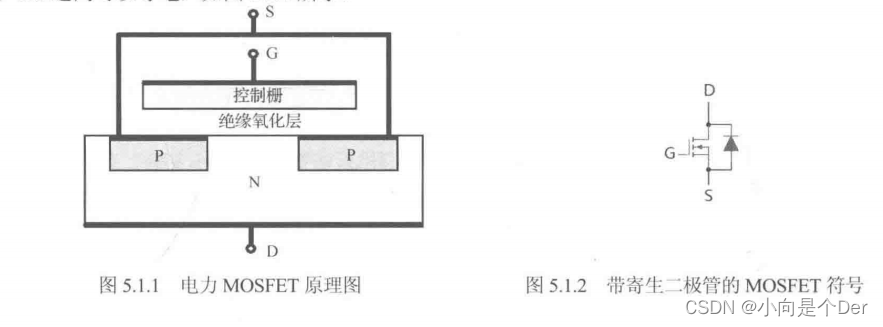
寄生电容
如下图所示,实际的MOS器件并不是像书本上介绍的那样,由于制作工艺、材料以及封装的原因,MOS器件的栅极(g)源极(s)漏极(d)三个电极之间会各存在一个寄生电容,从MOS被制作出来就自带的有。这三个寄生电容分别命名为:Cgs、Cgd、Cds,具体值会在数据手册中标明。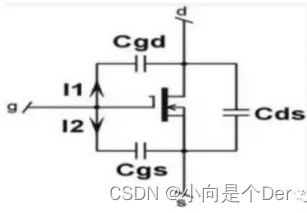
这里以常用的7843为例,在其数据手册中就有记录,注意在数据手册中,一般是不是直接标出上述上个电容具体值,而是用输入电容、输出电容、逆导电容表示,它们六者的关系如下:
输入电容(Input Capacitance)Ciss=Cgd+Cgs
输出电容(Output Capacitance) CDSS=Cgd+Cds
逆导电容( Reverse Transfer Capacitance) Crss=Cgd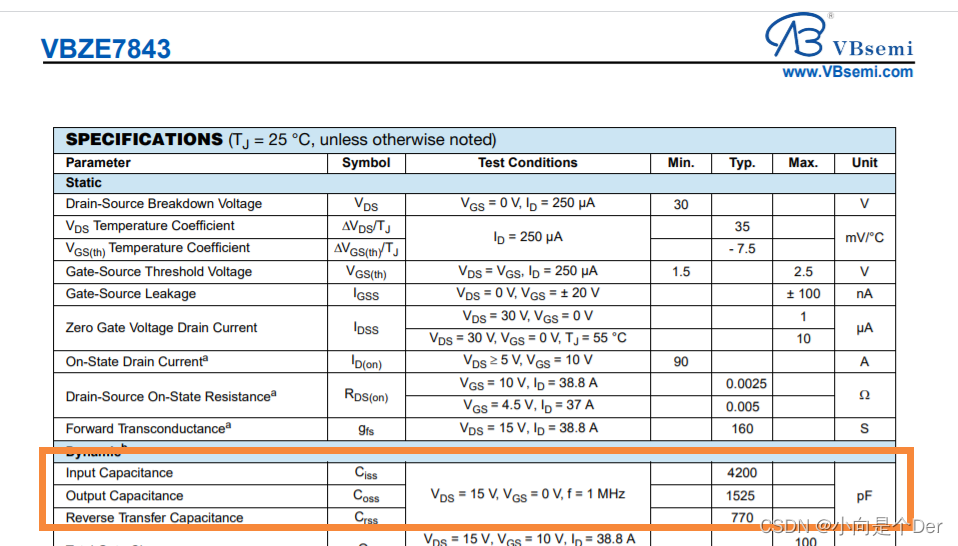
根据上面的公式可以得到此款7843的Cgs=4200-770=3430pf,约等于3.5nf。
寄生电感
为了更好地理解后面的仿真过程,这里还需要补充一个点,那就是寄生电感,有关其介绍可以参考此文:寄生电感怎么产生的_寄生电感产生原因是什么。
仿真
了解了寄生电感和寄生电容后,就可以开始仿真了,这里只是为了说明现象,定性的分析,所以参数设定方面就不是很严谨。这里笔者选用的寄生电感取值为100nH,寄生电容取值为3.5nF,MOS选用NMOS,控制信号为1KHZ,占空比为10%的PWM波形。
仿真1栅极串接小电阻
这个仿真旨在说明MOS控制的栅极串接小电阻R2的作用,根据前面的分析,我们知道,在实际的MOS电路中存在寄生电感和寄生电容,等效后可以得到如下图所示的仿真电路。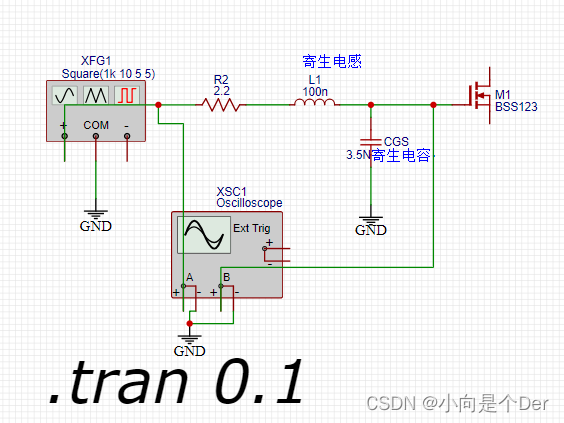
可以发现,在加入栅极电阻后组成了一个RLC电路,根据基尔霍夫定律,在0初始条件下进行拉氏变换可以得到如下传递函数。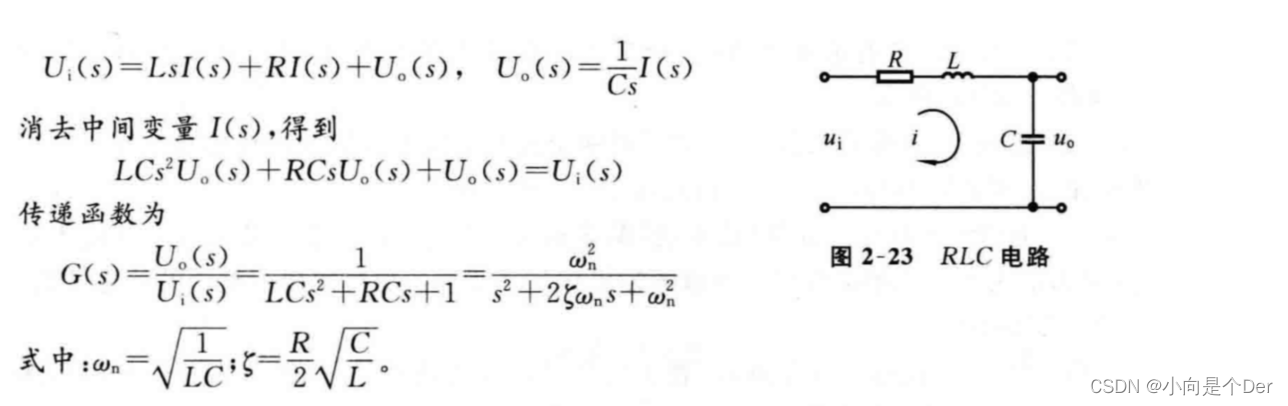
其中ωn是无阻尼自然振荡角频率;ζ是系统阻尼比,根据传递函数,由于电路固定,元器件也固定,所以ωn是固定的,ζ是可以随着电阻的增加而增加的。在自动控制原理对典型二阶系统的描述中可以知道,ζ在不同范围,系统输出会有不同的状态: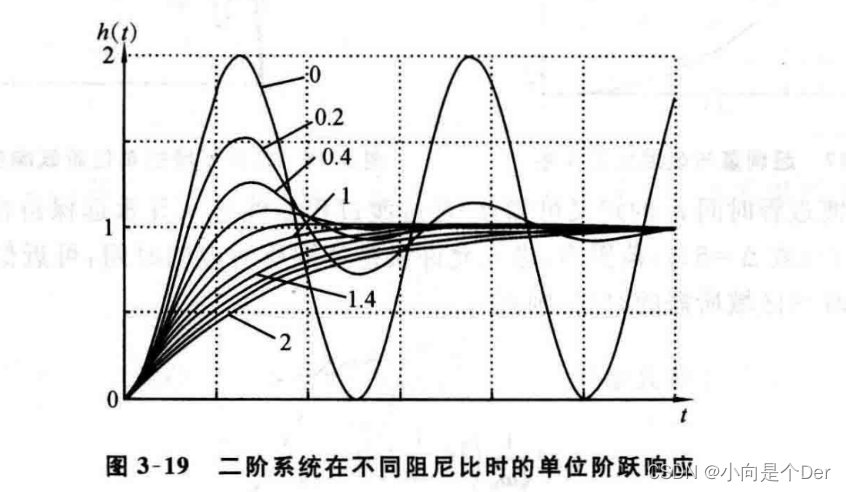
0<ζ<1:欠阻尼状态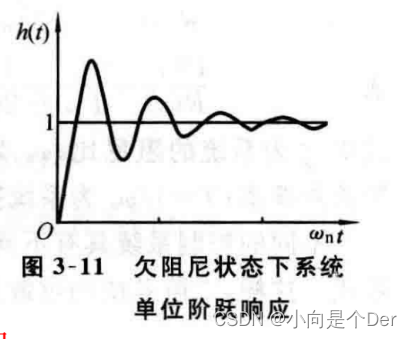
ζ=1:临界阻尼状态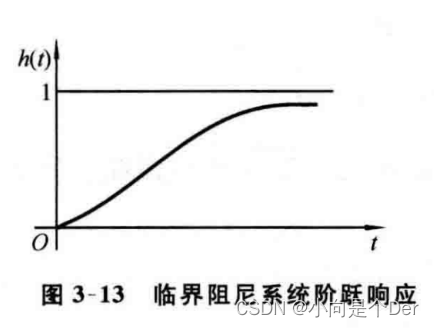
ζ>1: 过阻尼状态
最佳阻尼比为ζ=0.707。
当R2=2.2Ω,未反向并联二极管时
栅极驱动的实际波形如下: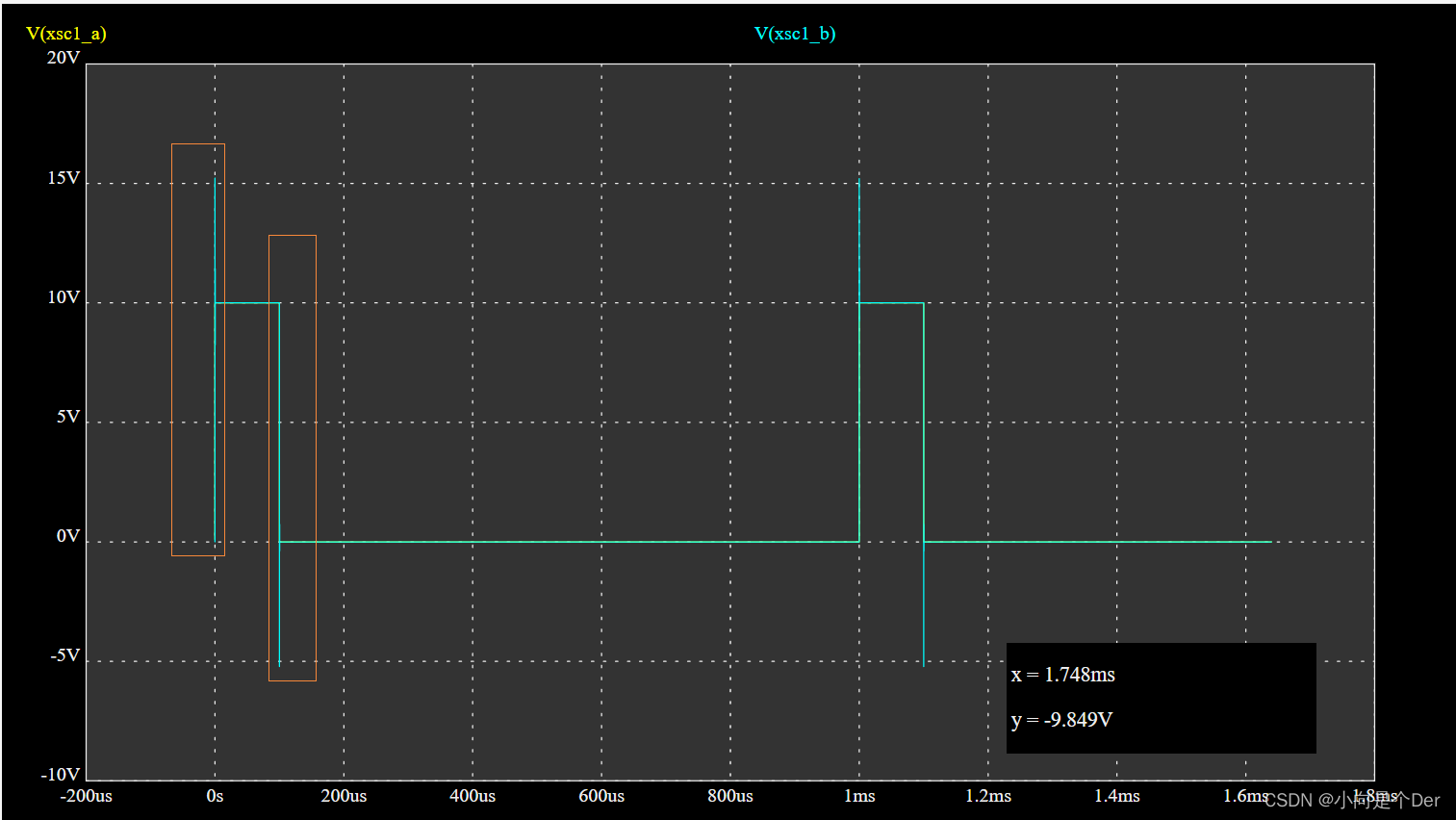
此时 ζ=0.021,属于欠阻尼状态,超调量大约为50%,调节时间大约为580ns,出现了振铃现象。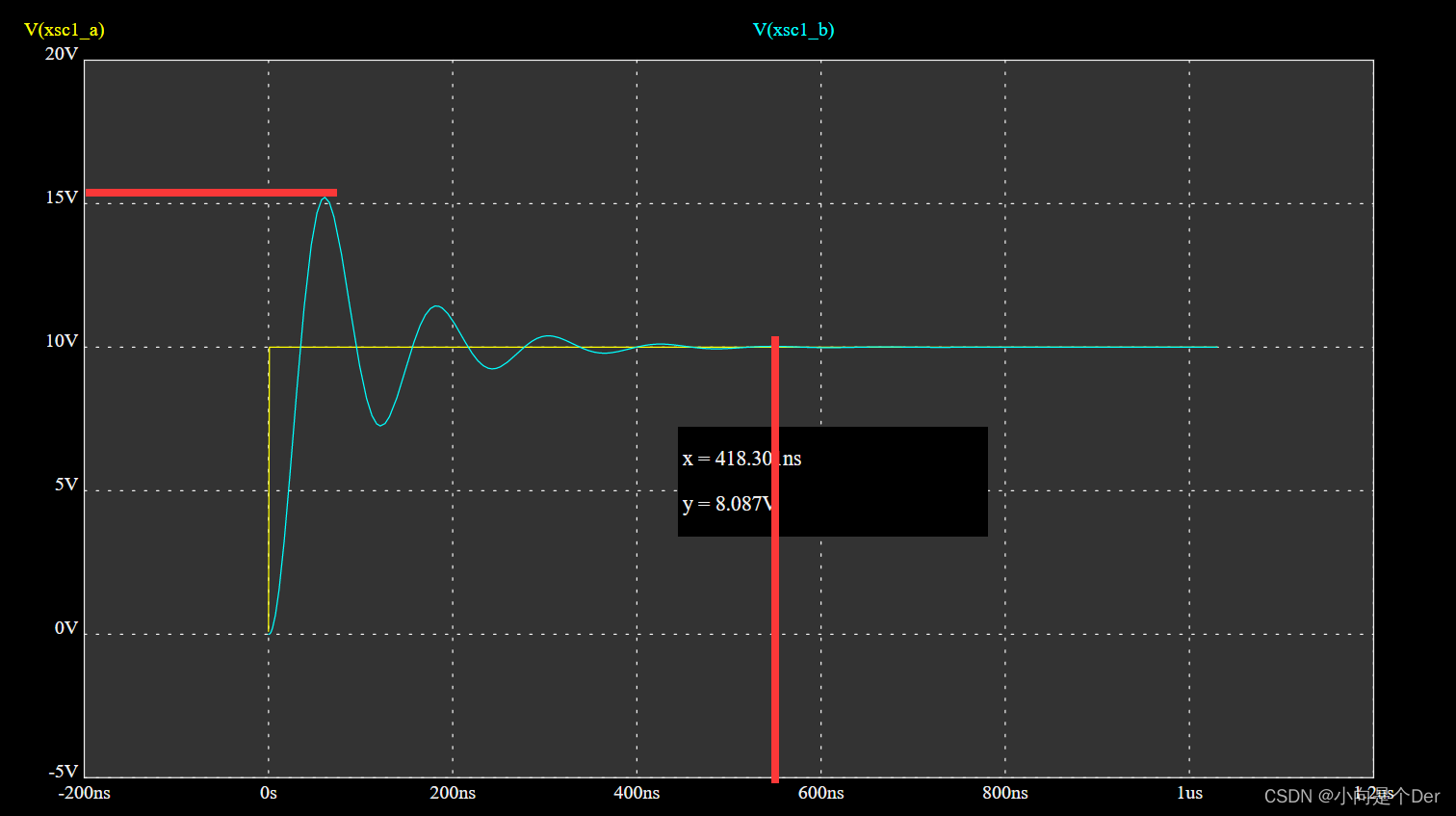
可以发现此时上升沿会存在超调量,并且超调量很大,如果,管子耐压值不够,很可能会因为这个超调量而损坏。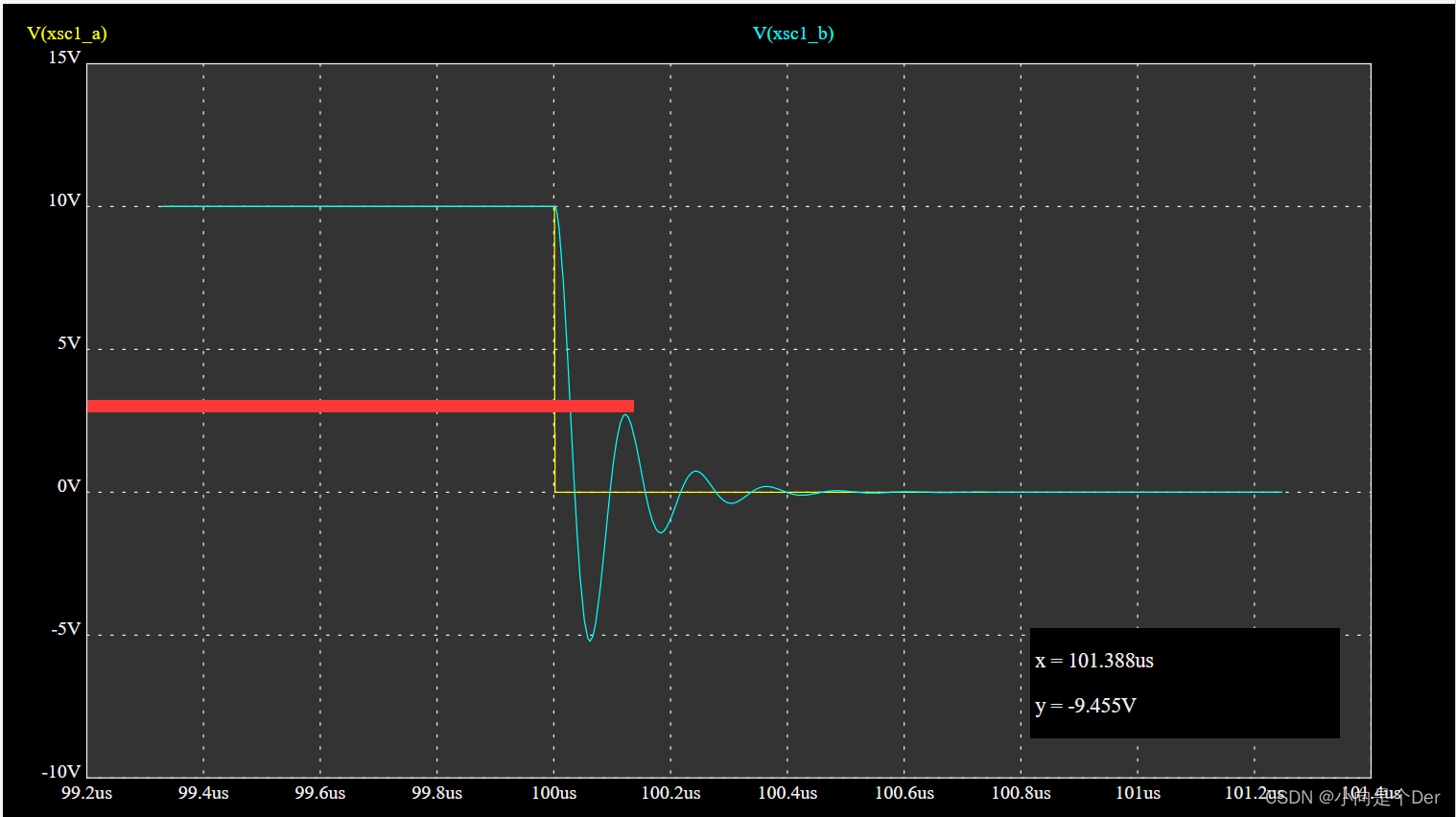
同样,下降沿位置也出现了超调,如果这个超调量过大,达到了MOS的导通电压,很可能会使MOS在本该关闭的时间出现误导通,这对于用MOS组成的H桥和三相桥电路来说是致命的,如果这个误导通时间长度超过了设定的死区时间,就会出现上桥臂和下桥臂同时导通的时间,就相当于直接将功率部分的电源正和电源负直接短接,一瞬间的电流足以点亮你的MOS管。
所以为了保护电路安全,我们必须尽可能的降低超调量,消除栅极驱动的振铃现象。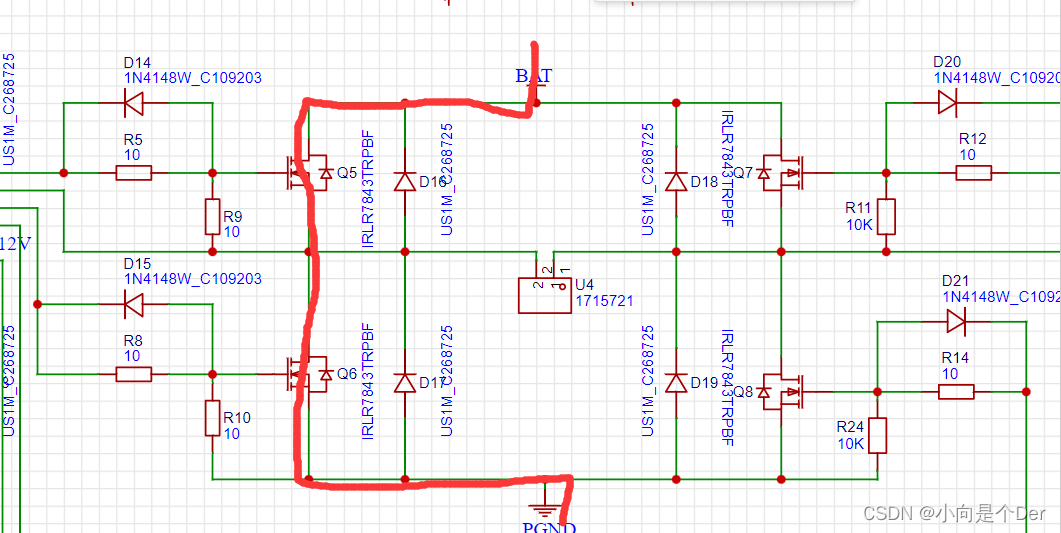
当R2=4.7Ω,未反向并联二极管时
栅极驱动的实际波形如下: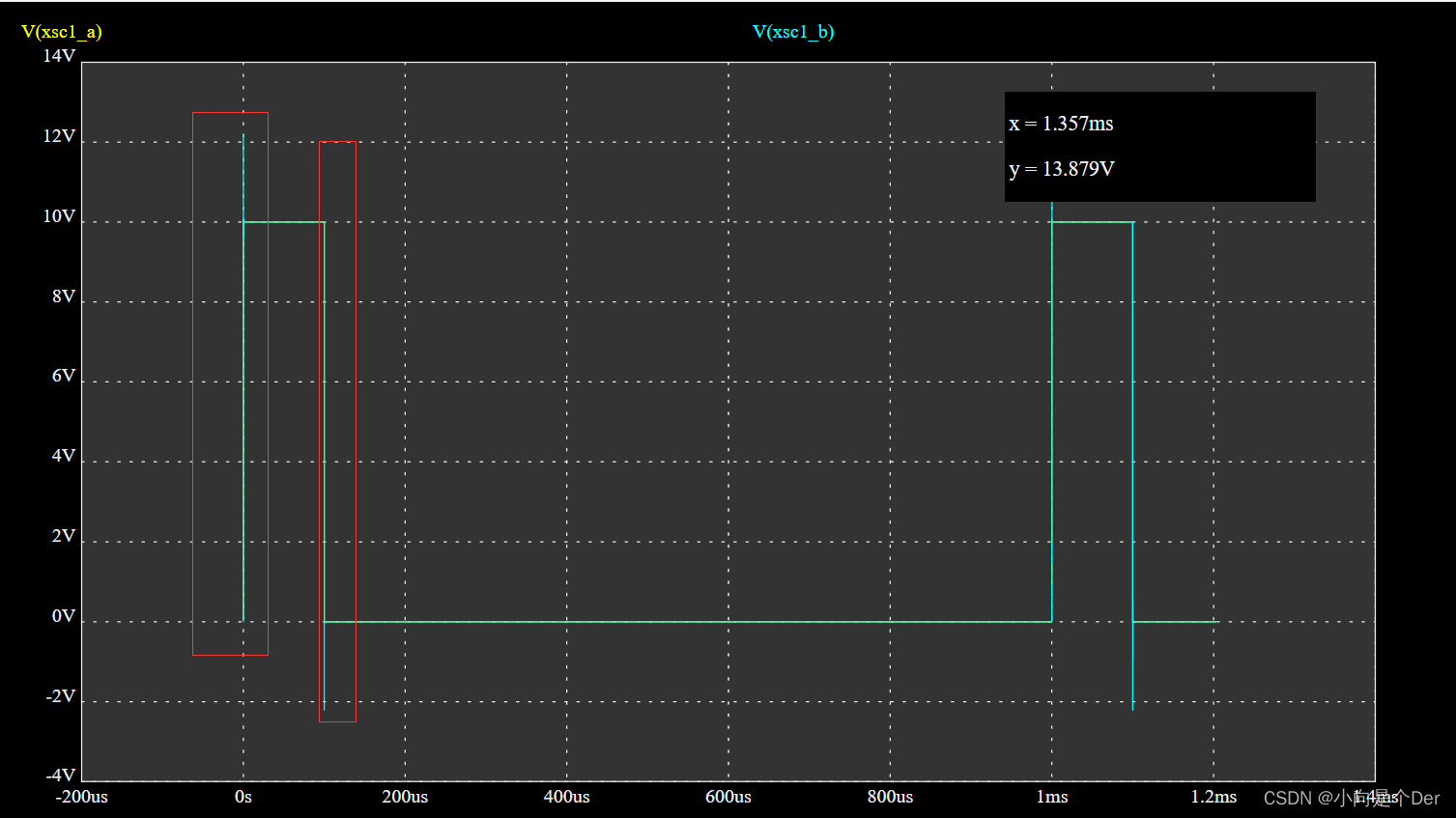
此时 ζ=0.4396,还是属于欠阻尼状态,超调量大约为21%,调节时间大约为370ns。
上升沿: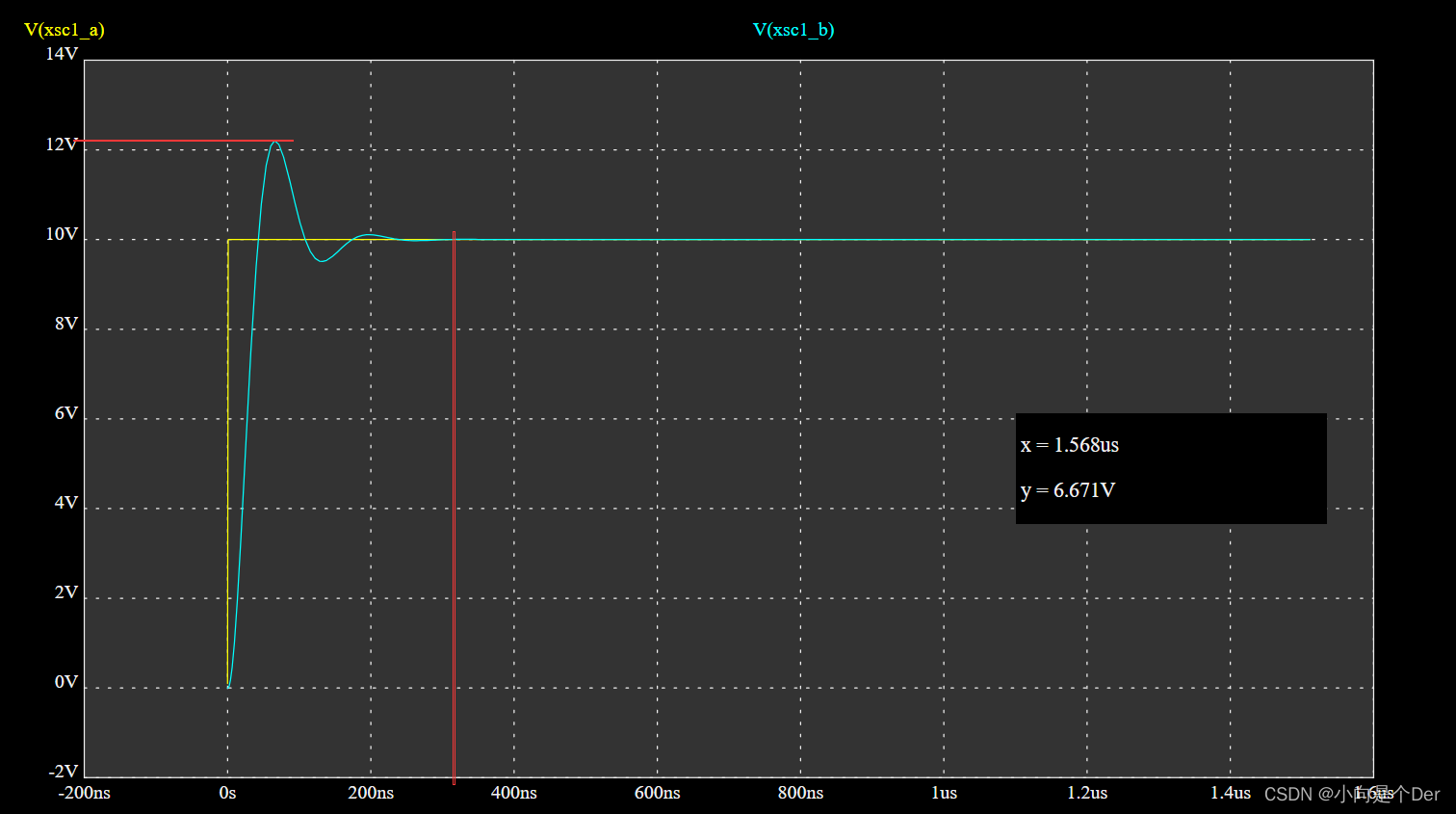
下降沿: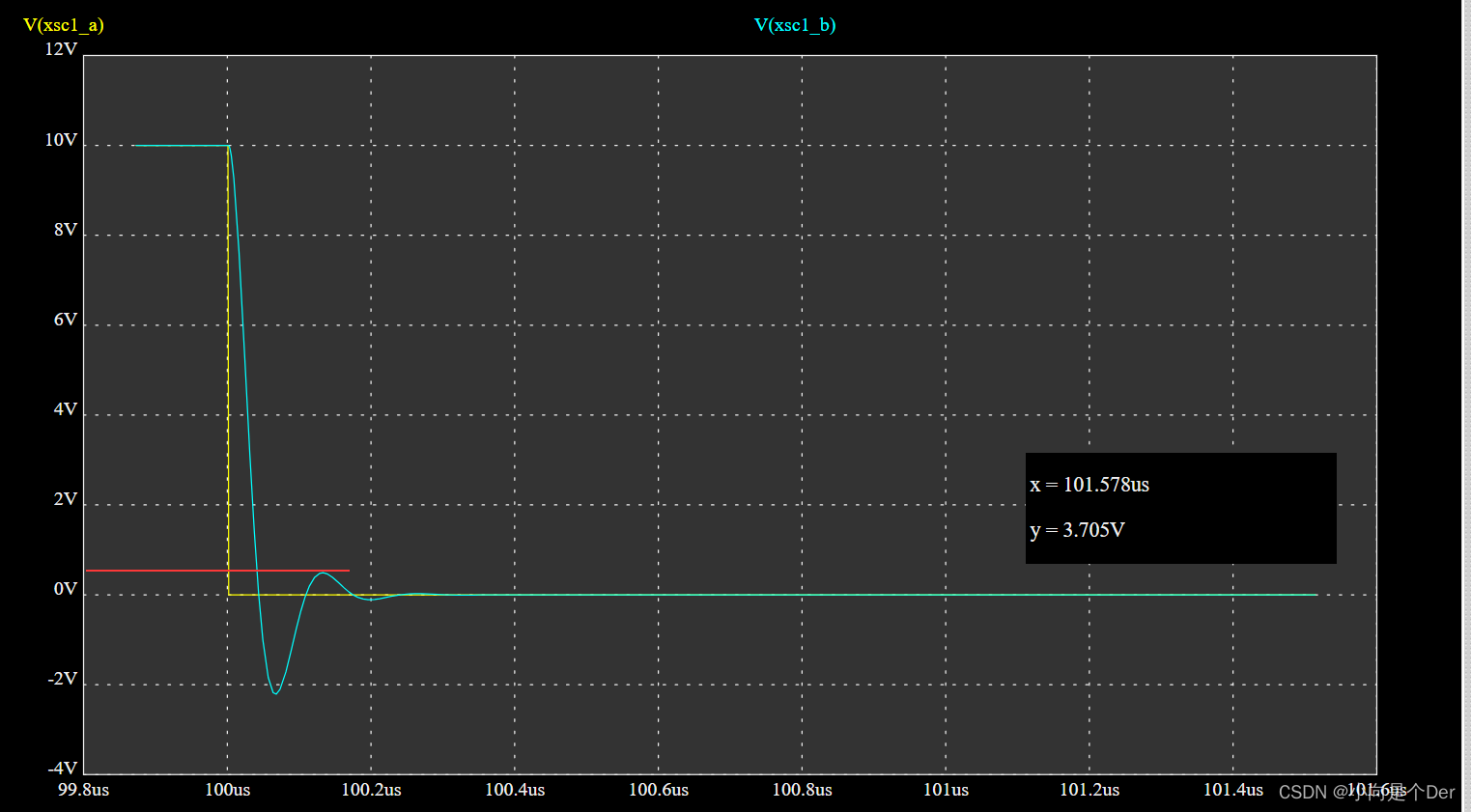
当R2=7.56Ω,未反向并联二极管时
此时ζ=0.707,为自动控制原理中的最佳阻尼比,这里只是单纯展示一下最佳阻尼比时系统输出的状态,需要强调的是此取值并不是实际系统中的最佳值。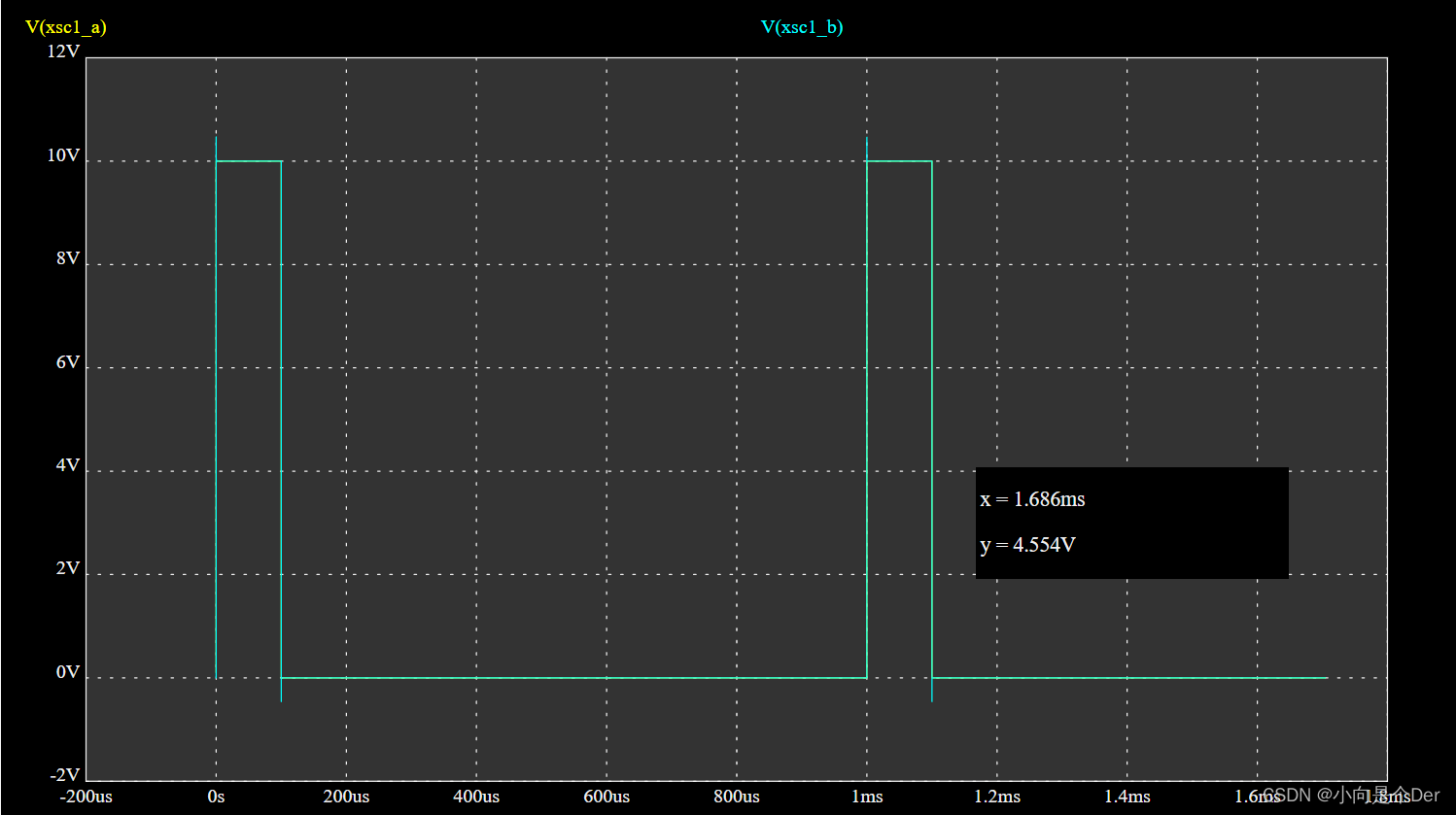
此时上升沿的超调量为5%,调节时间ts=180ns。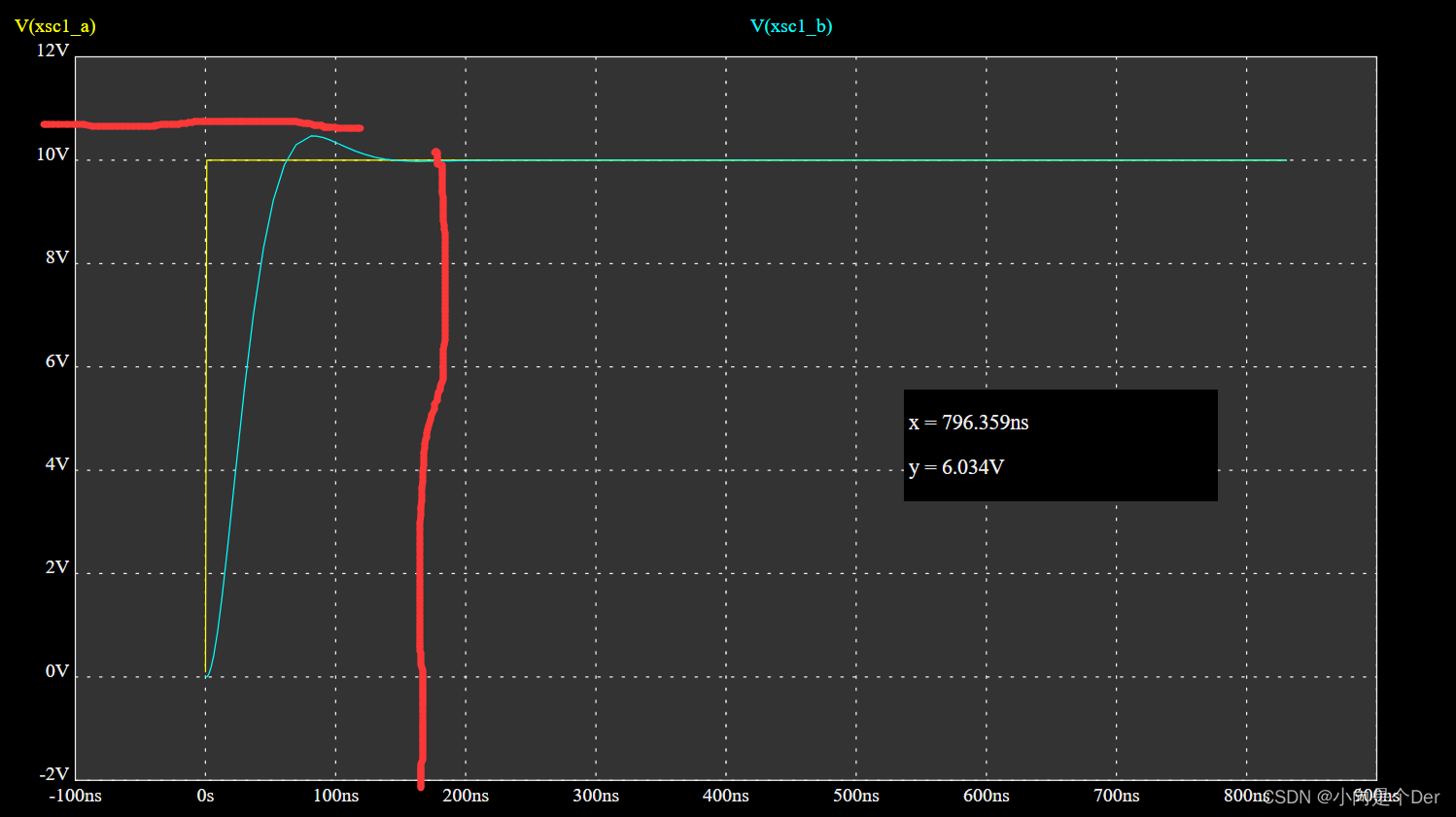
当R2=10.7Ω,未反向并联二极管时
栅极驱动的实际波形如下: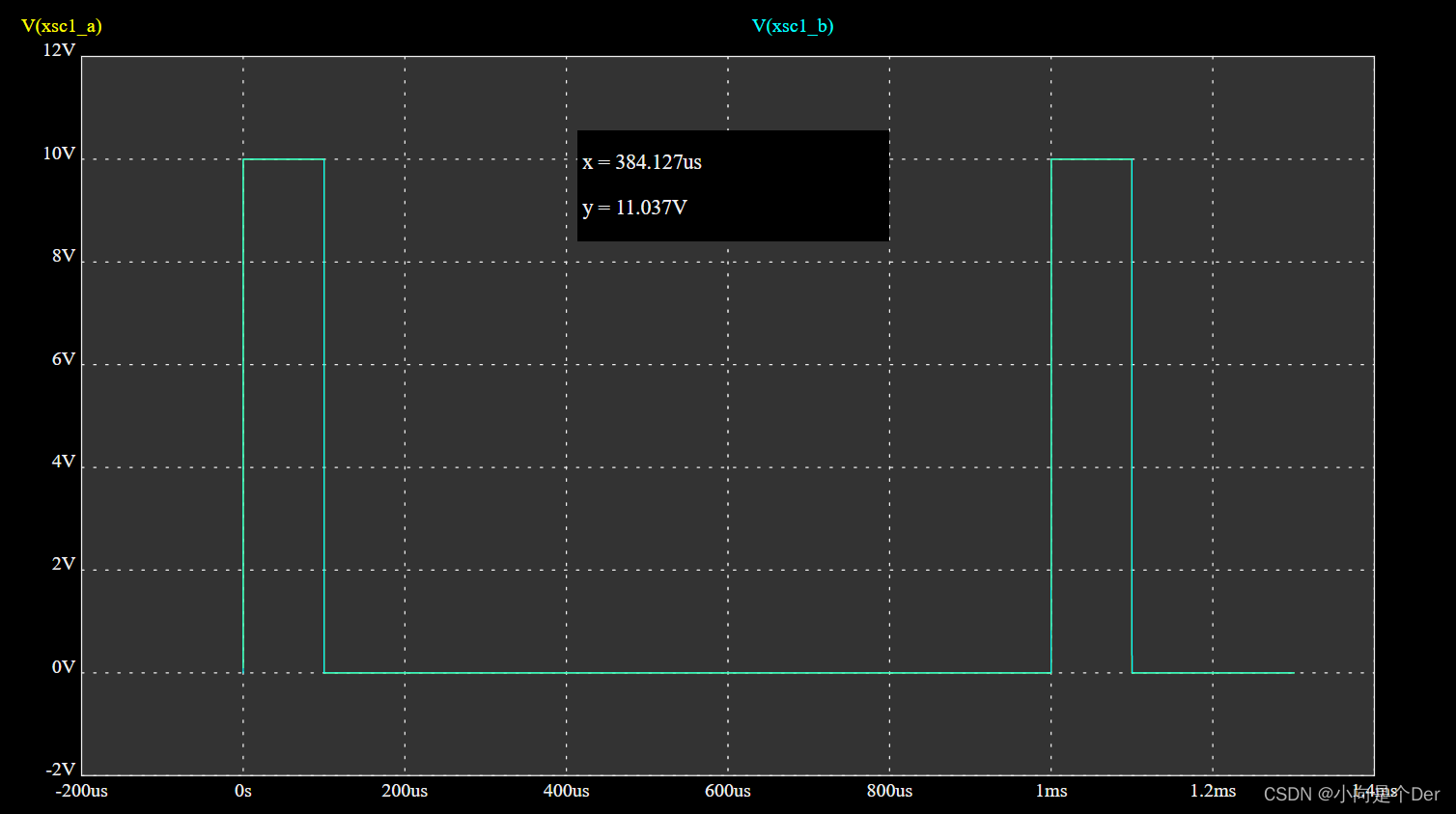
此时 ζ=1,还是属于临界阻尼状态,超调量消失了,振铃也消失了,调节时间大约为153ns。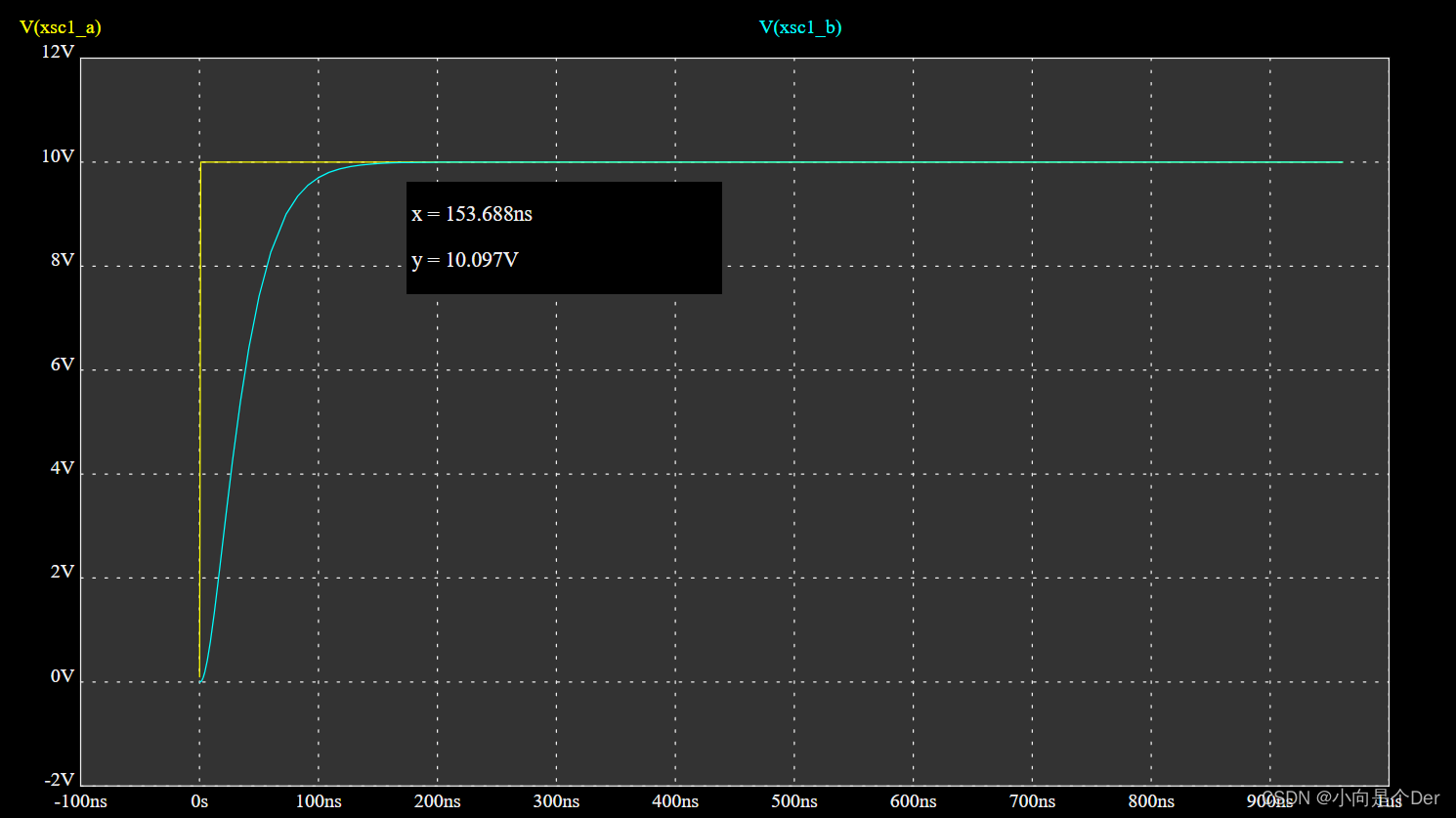
下降沿波形: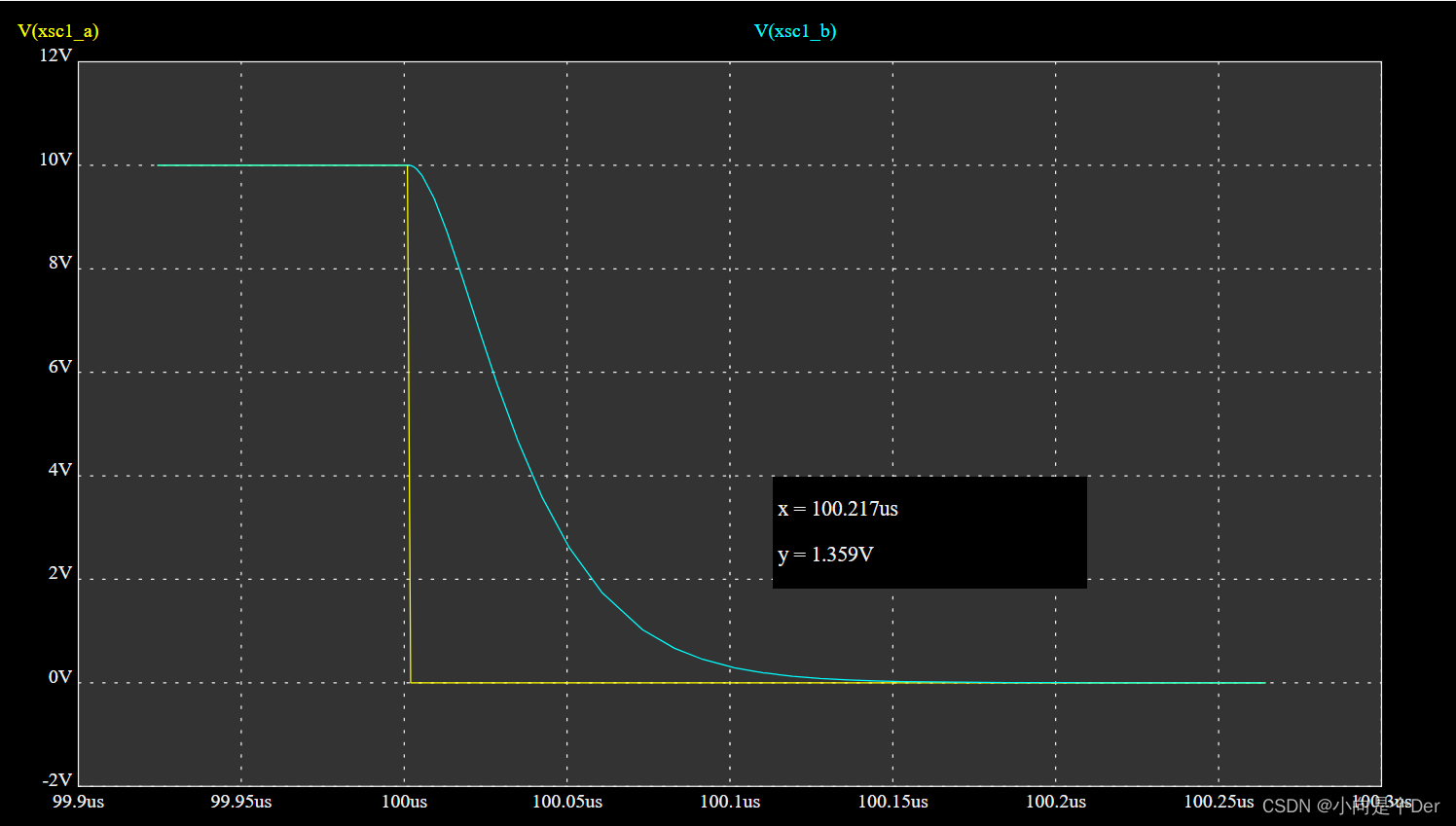
可以发现此时的电阻值已经满足了我们的期望,没有振铃,也没有超调,那么继续加大电阻,使系统变为过阻尼状态,会有什么现象呢?
当R2=15Ω,未反向并联二极管时
ζ=1.403,可以发现系统还是没有超调和振铃,但是调节时间ts还增加了,这对于我们的MOS控制来说并没有好处,上升时间越长,MOS处于半开半关状态的时间也越长,MOS发热就会比较严重,具体讲解可以查看一下视频:
【让MOS烧的值得 振铃,杂散电感知识讲解-哔哩哔哩】
【一个公式都没有 MOS米勒电容的通俗讲解-哔哩哔哩】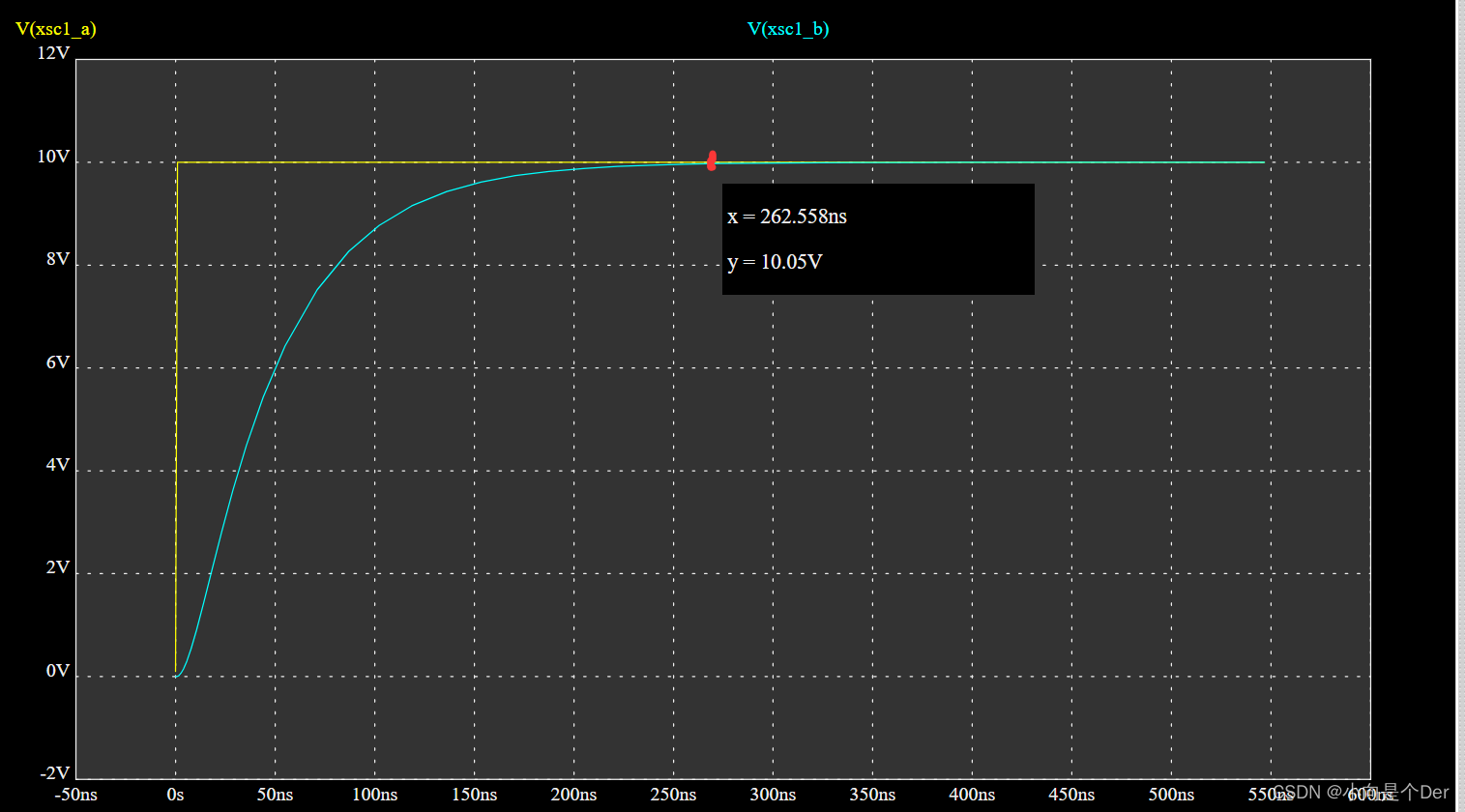
仿真2栅极串接小电阻+反并联二极管
在栅极驱动电路中,除了上面提到的电阻R2外,很多方案都会添加一个反并联二极管,那么增加这个二极管的作用是什么呢?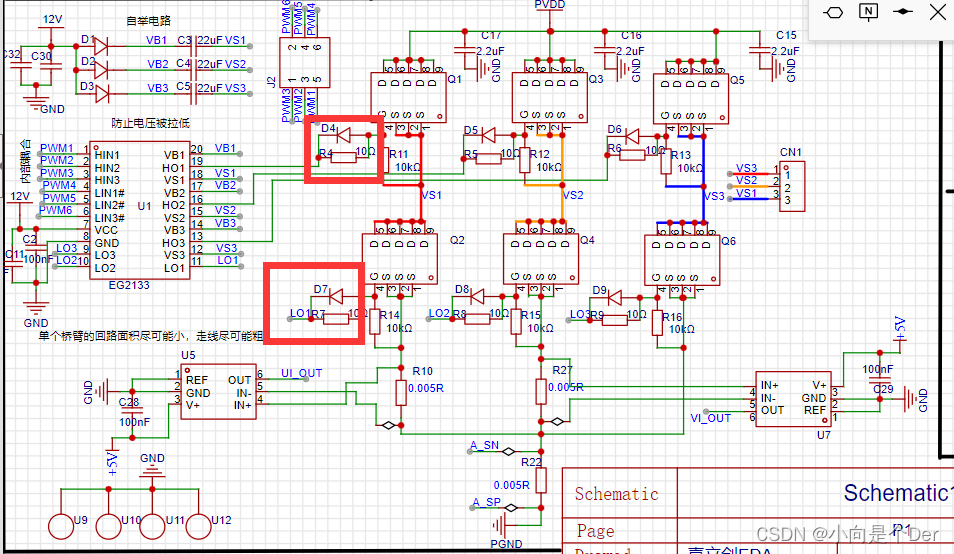
仿真电路如下: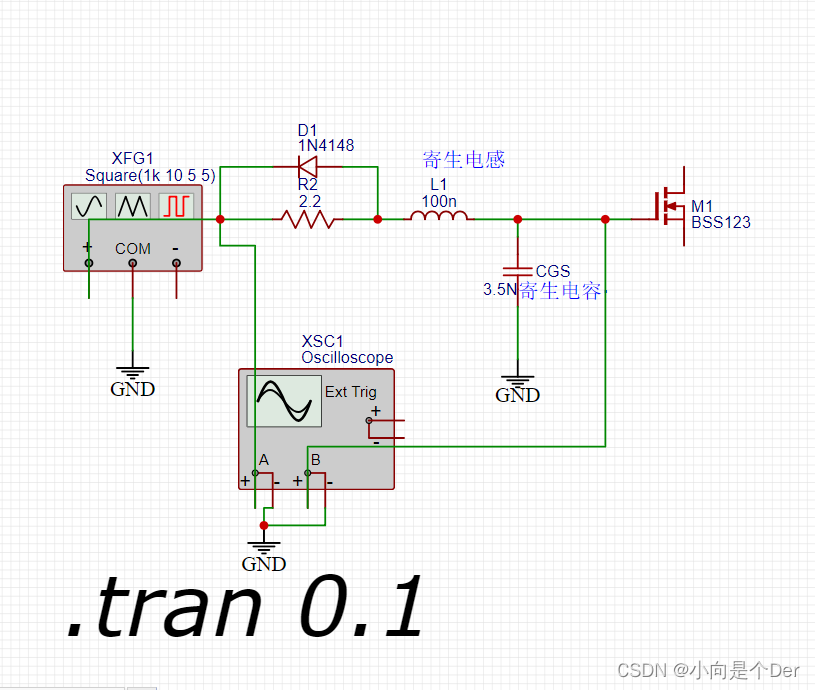
当R2=10.7,并联二极管时
栅极驱动的实际波形如下: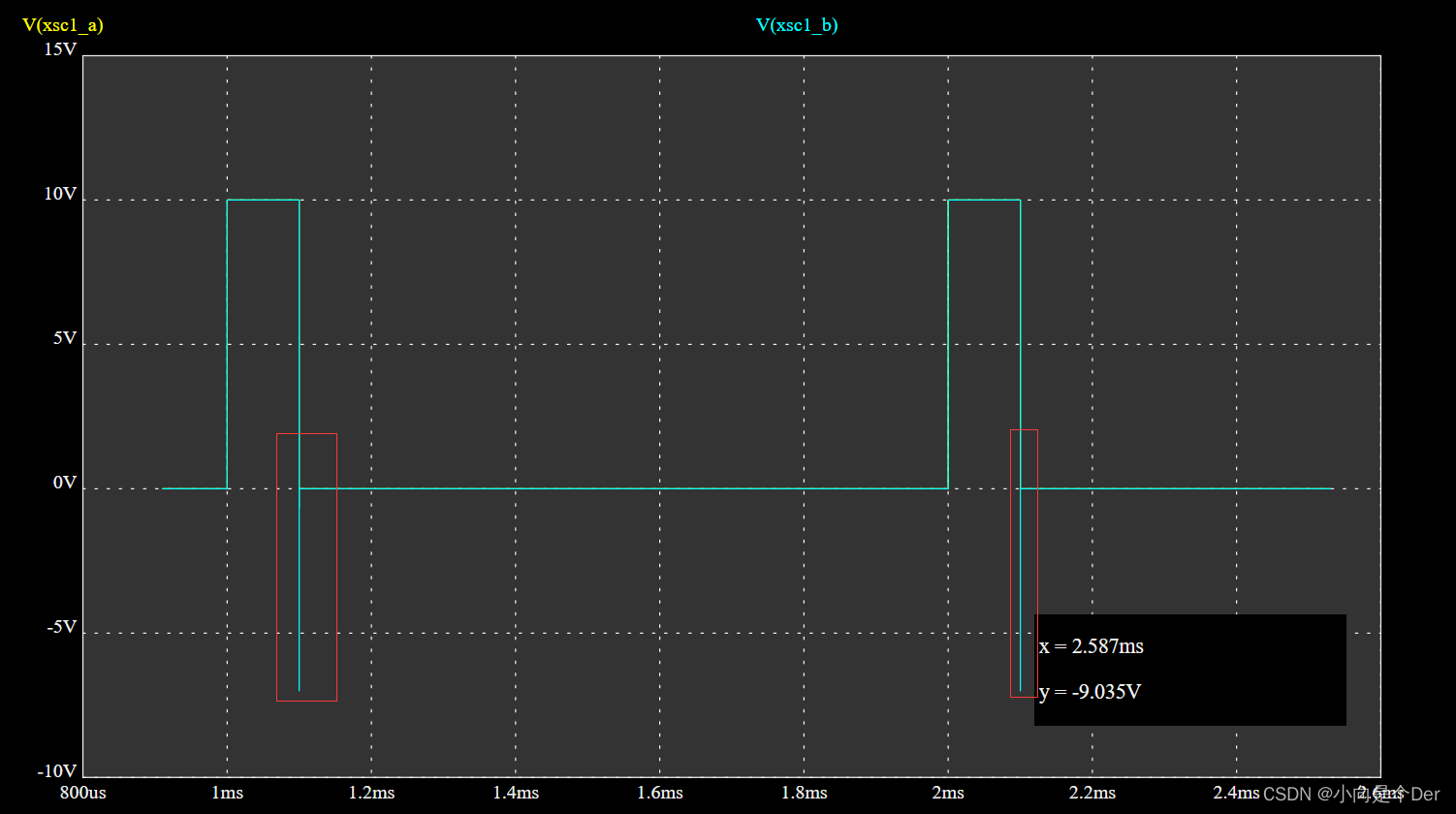
上升沿(并联二极管):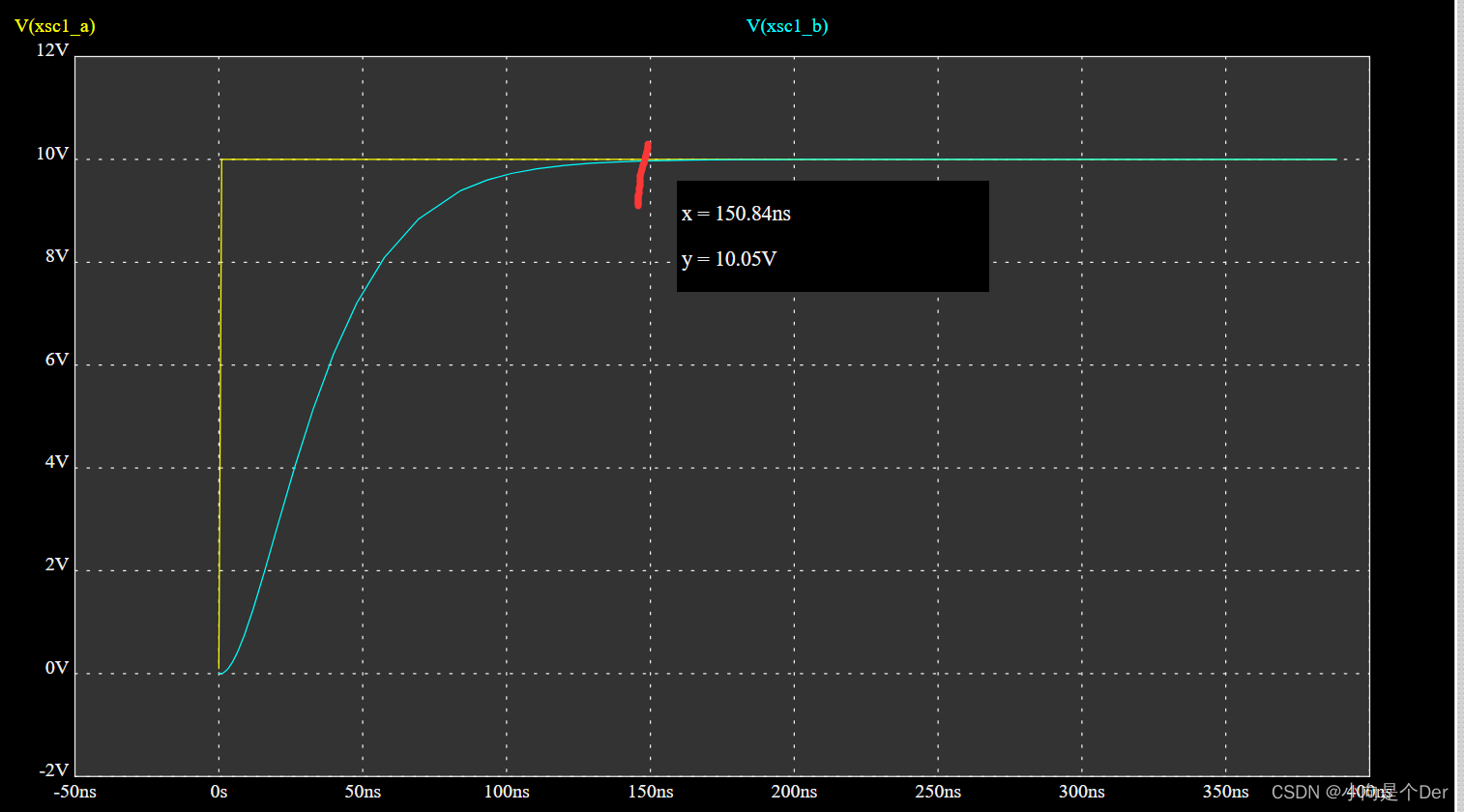
上升沿(未并联二极管):
可以发现增加二极管后对上升沿没有影响。
下降沿波形(并联二极管):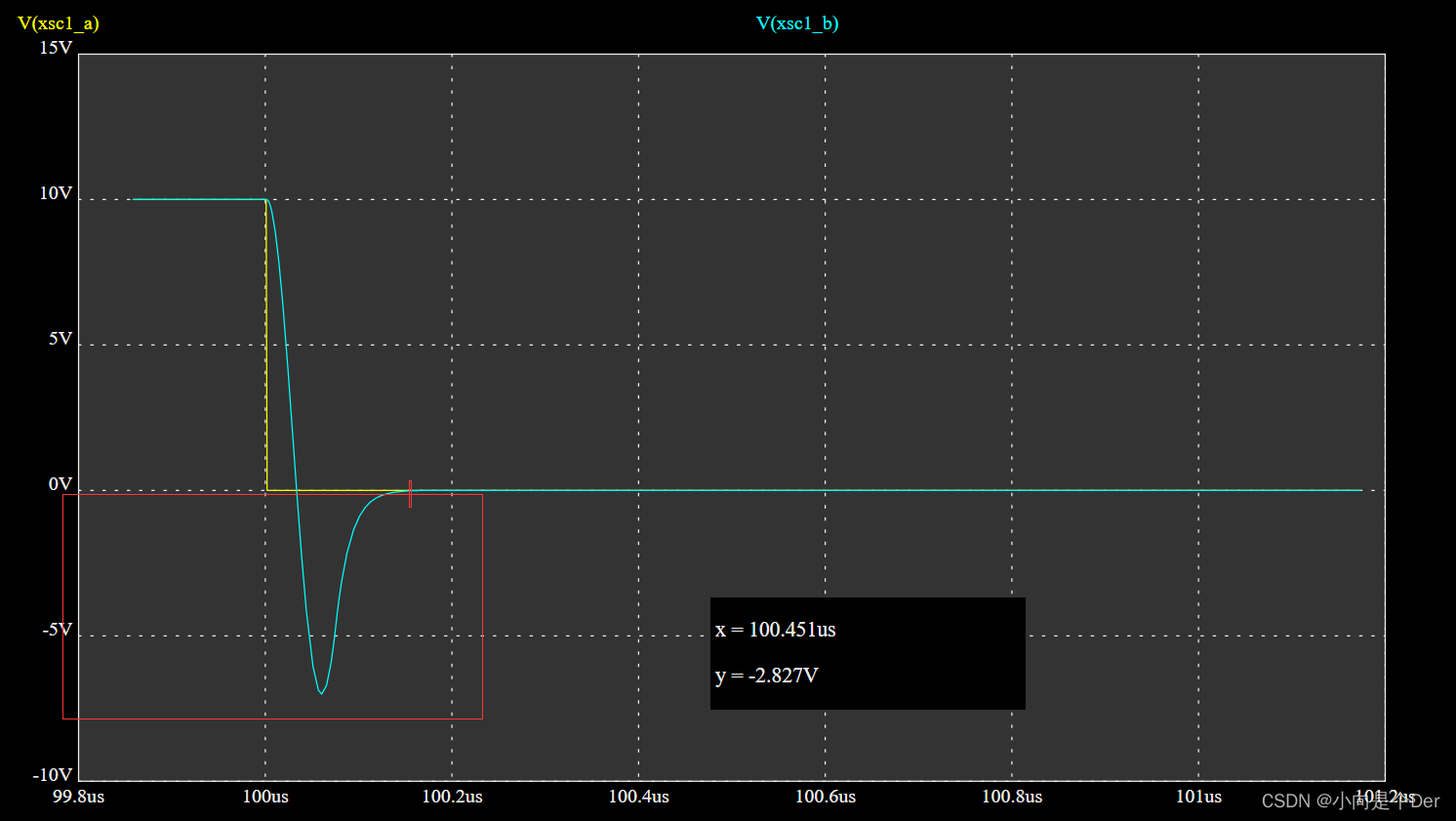
下降沿波形(未并联二极管):
观察下降沿,可以发现,比没有并联二极管的电路而言,下降沿出现了一个反向电压,这样有利于MOS的迅速关断,能够进一步保护MOS。
其他方案
除了上述处理方法外还可以在栅极加入RC电路来消除振铃和超调,具体讲解参考此视频。【LC串联谐振的经典应用_mos管驱动电路为什么要加一个小电阻?-哔哩哔哩】
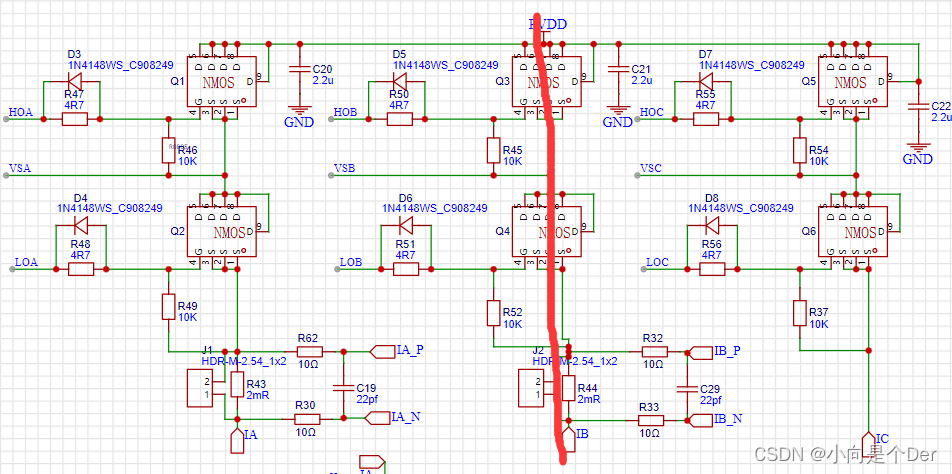
MOS管及其外围电路设计。
总结
有关MOS栅极驱动的介绍就记录至此,文中如有不妥之处欢迎批评指出。
参考文献
模拟电子设计导论 杨艳 傅强
自动控制原理 吴怀宇
边栏推荐
- Go language implementation principle -- lock implementation principle
- 如何快速理解复杂业务,系统思考问题?
- 代码农民提高生产力
- Ultrasonic sensor flash | LEGO eV3 Teaching
- 媒体查询:引入资源
- Go language implementation principle -- map implementation principle
- Multi sensor fusion of imu/ electronic compass / wheel encoder (Kalman filter)
- [speech processing] speech signal denoising based on Matlab GUI Hanning window fir notch filter [including Matlab source code 1711]
- Common JVM tools and optimization strategies
- 使用rewrite规则实现将所有到a域名的访问rewrite到b域名
猜你喜欢
The method and principle of viewing the last modification time of the web page

2022 R2 mobile pressure vessel filling review simulation examination and R2 mobile pressure vessel filling examination questions
一文搞定垃圾回收器
2022.02.13 - SX10-30. Home raiding II
数据库基础知识(面试)

Non rigid / flexible point cloud ICP registration
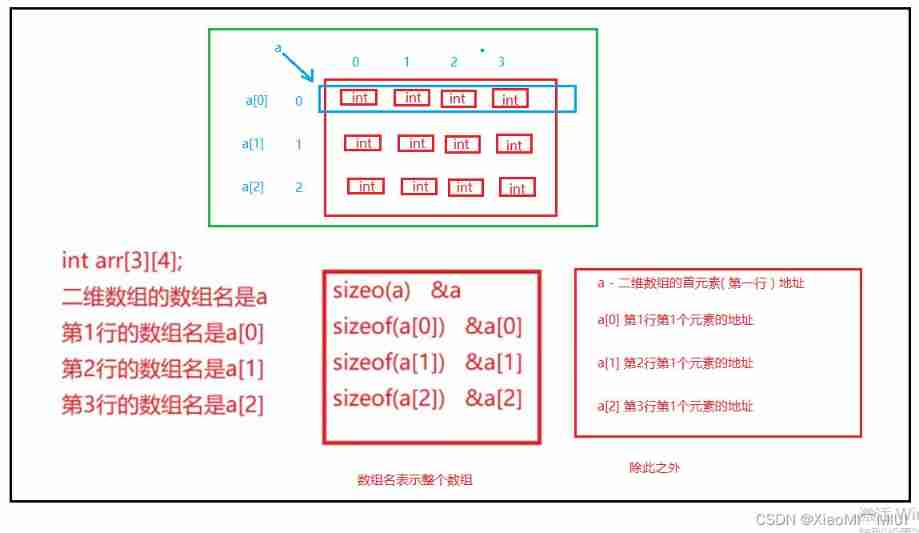
Detailed explanation of pointer and array written test of C language

Hcip day 12 (BGP black hole, anti ring, configuration)

Alibaba Tianchi SQL training camp task4 learning notes
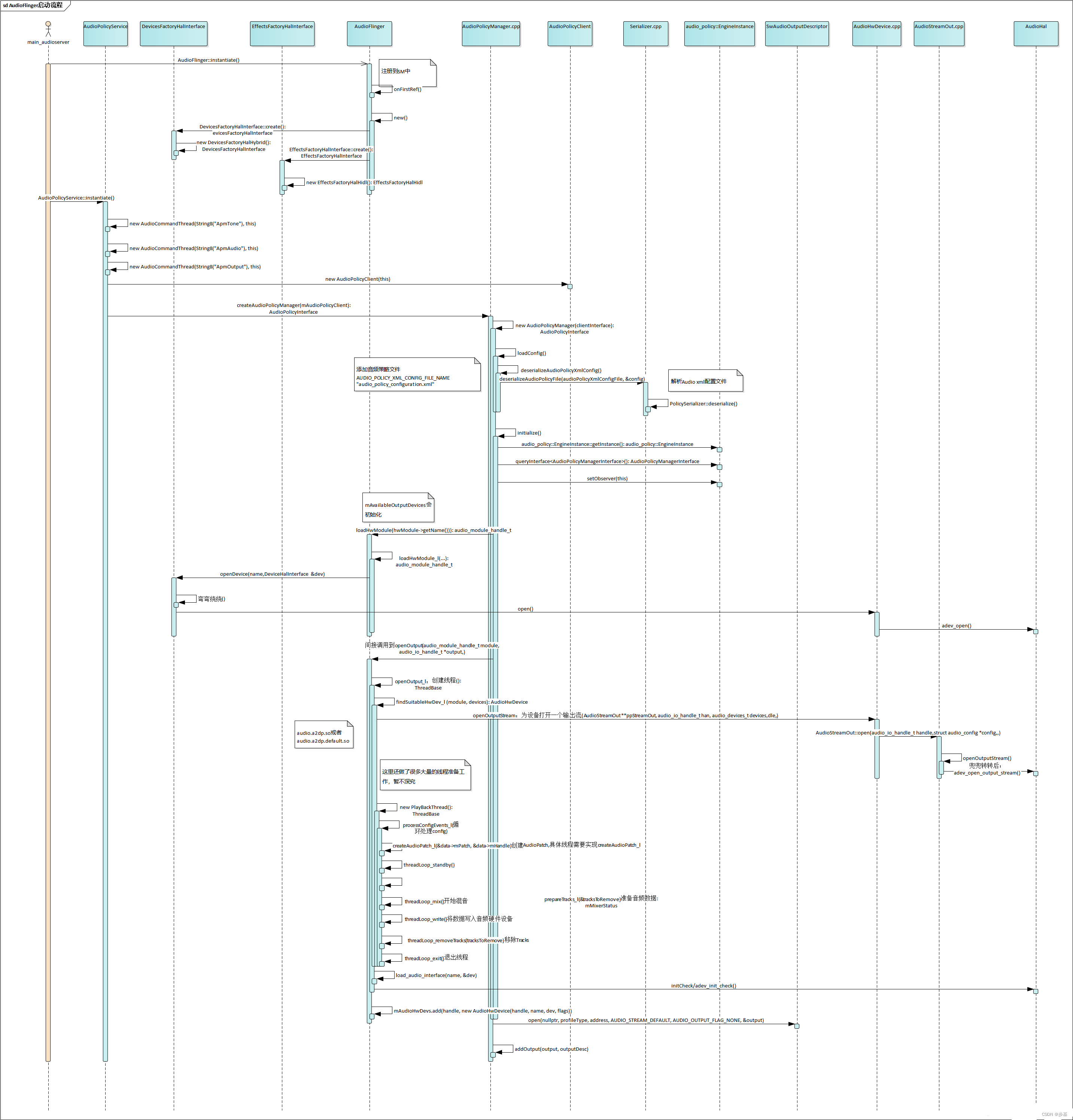
audiopolicy
随机推荐
Expectation, variance and covariance
February 13, 2022 -5- maximum depth of binary tree
3D point cloud slam
媒体查询:引入资源
Global and Chinese markets for children's amusement facilities 2022-2028: Research Report on technology, participants, trends, market size and share
Data type, variable declaration, global variable and i/o mapping of PLC programming basis (CoDeSys)
Finally understand what dynamic planning is
如何快速理解复杂业务,系统思考问题?
Basic knowledge of database (interview)
MoCo: Momentum Contrast for Unsupervised Visual Representation Learning
YML configuration, binding and injection, verification, unit of bean
TypeError: this. getOptions is not a function
(4)UART應用設計及仿真驗證2 —— TX模塊設計(無狀態機)
一文搞定class的微觀結構和指令
【Note17】PECI(Platform Environment Control Interface)
Ultrasonic sensor flash | LEGO eV3 Teaching
Krypton Factor-紫书第七章暴力求解
C Primer Plus Chapter 9 question 10 binary conversion
3D reconstruction of point cloud
Alibaba Tianchi SQL training camp task4 learning notes