当前位置:网站首页>[path planning] RRT adds dynamic model for trajectory planning
[path planning] RRT adds dynamic model for trajectory planning
2022-07-04 23:48:00 【Chinchilla slightly】
After adding a moving object in the previous article , You can consider adding a dynamic model to this moving object , Then the trajectory planning is carried out according to the dynamic model .
Ideas
My idea of this dynamic model is to refer to the vector method used in open source flight control to specify the speed direction , Use S Curve to plan the speed trajectory , The final effect looks ok .
S curve
Here you can catch up on the speed in open source flight control S Knowledge of curve Planning , The general idea is : Guaranteed acceleration , Continuous speed , Change the speed with a fixed acceleration . The overall effect is : First, add the acceleration with constant acceleration a Add to the maximum acceleration a_max, Time is T1, Then run at constant acceleration T2 Time , Then, the acceleration is increased from a_max Reduced to 0. here PIX4 An annotation diagram is also given in the source code of :

Someone on the Internet drew a clearer picture , Let me borrow it :

according to PIX4 Thought , The whole speed tracking process is divided into three time stages T1,T2,T3.T1 In the stage, the acceleration is increased at the set acceleration speed ,T2 The phase is constant acceleration ,T3 In the stage, the acceleration decreases with a negative constant acceleration until 0. We can judge which stage we are in every cycle , You can control . The final goal of this algorithm is that the final acceleration is 0 When , Just the speed reaches the target .
The time and end speed of each stage are high school knowledge , It's easier to deduce , And there are also source code and online analysis for reference , I feel no need to waste any more space , You can deduce it by yourself
The general procedure steps are :
1) Calculate when the acceleration is 0 Track speed at
2) The acceleration is 0 The difference between the end speed and the target speed determines the acceleration direction
3) Calculation T1,T2,T3 Each length of time
4) Determine the current time period according to the time interval of the control cycle , And then generate acceleration and velocity
according to S The way of the curve , I wrote a function , Incoming maximum acceleration , Maximum acceleration , Current acceleration , Current speed , Target speed , Control cycle T, The acceleration and speed control quantity of the next cycle can be generated :

Test it , The approximate speed of its generation S The effect of the curve is like this :

In fact, the effect is not bad . Then you can use this speed S Curve function to pull the model on the trajectory .
Traction track
In the previous article , We have used RRT Search for critical path points , Then use the fifth order Bessel to smooth the curve , Each track point of the smooth curve can be obtained , So we can set up a Reach the area , For example 10 Is a circle of radius , The radius of reaching the target trajectory point 10 The track point is reached within , Then switch to the next track point for traction . Traction can be used vector The way , This is also a more convenient way for me :

We know the target trajectory point , Therefore, we can follow the target trajectory points Calculate the remaining distance , Then we can use the calculated remaining distance , Take the maximum speed as the goal before reaching a certain remaining distance , Near the end , Just make some plans to slow down , This is a decision-making problem , Not part of this chapter :

Of course , This is a simple speed decision , It does not affect the subsequent results .
Then the target acceleration and velocity are generated , We can decompose it into xy The partial acceleration and the partial velocity in the axial direction xy The acceleration of the axis , Speed , Position control .
Final effect , I recorded a simple video :
RRT+ Bessel + Motion model trajectory
In this way, the overall effect is much more fun .
边栏推荐
- 模板的进阶
- 【雅思阅读】王希伟阅读P4(matching1)
- OSEK standard ISO_ 17356 summary introduction
- Galera cluster of MariaDB - dual active and dual active installation settings
- Pytoch --- use pytoch to realize linknet for semantic segmentation
- Why does infographic help your SEO
- MIT-6.824-lab4B-2022(万字思路讲解-代码构建)
- 微软禁用IE浏览器后,打开IE浏览器闪退解决办法
- ICML 2022 || 3DLinker: 用于分子链接设计的E(3)等变变分自编码器
- Blue sky nh55 series notebook memory reading and writing speed is extremely slow, solution process record
猜你喜欢
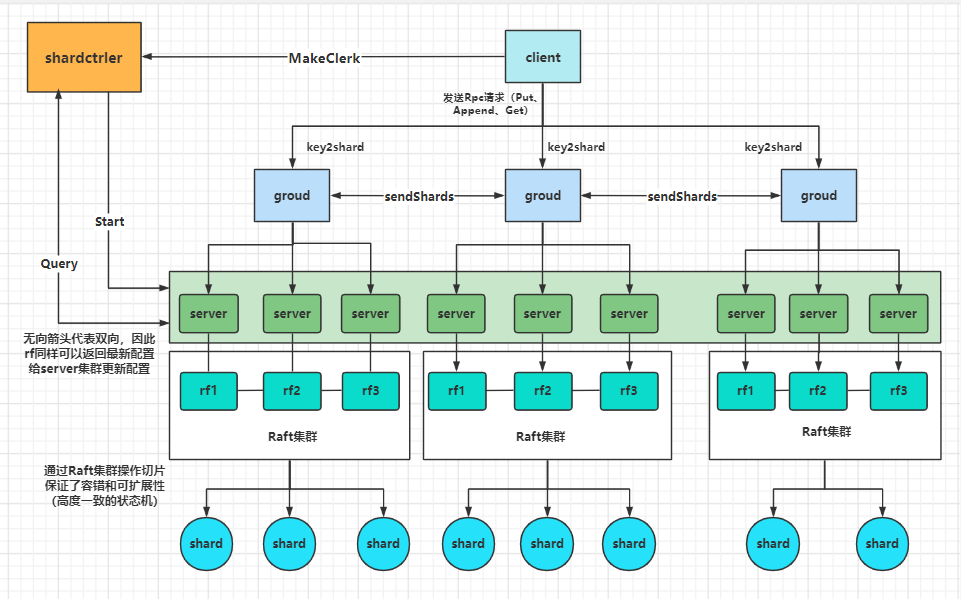
MIT-6.824-lab4B-2022(万字思路讲解-代码构建)
What is the difference between port mapping and port forwarding

Application of fire fighting system based on 3D GIS platform

壁仞科技研究院前沿技术文章精选

Hong Kong Jewelry tycoon, 2.2 billion "bargain hunting" Giordano

Application of multi loop instrument in base station "switching to direct"
![[IELTS reading] Wang Xiwei reads P4 (matching2 paragraph information matching question [difficult])](/img/83/63296108b47eda37c19b9ff9deb5ec.png)
[IELTS reading] Wang Xiwei reads P4 (matching2 paragraph information matching question [difficult])
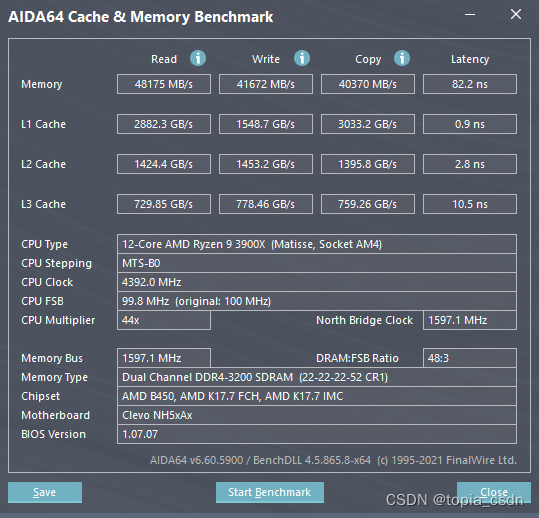
Blue sky nh55 series notebook memory reading and writing speed is extremely slow, solution process record
![[IELTS reading] Wang Xiwei reading P3 (heading)](/img/19/40564f2afc18fe3e34f218b7b44681.png)
[IELTS reading] Wang Xiwei reading P3 (heading)
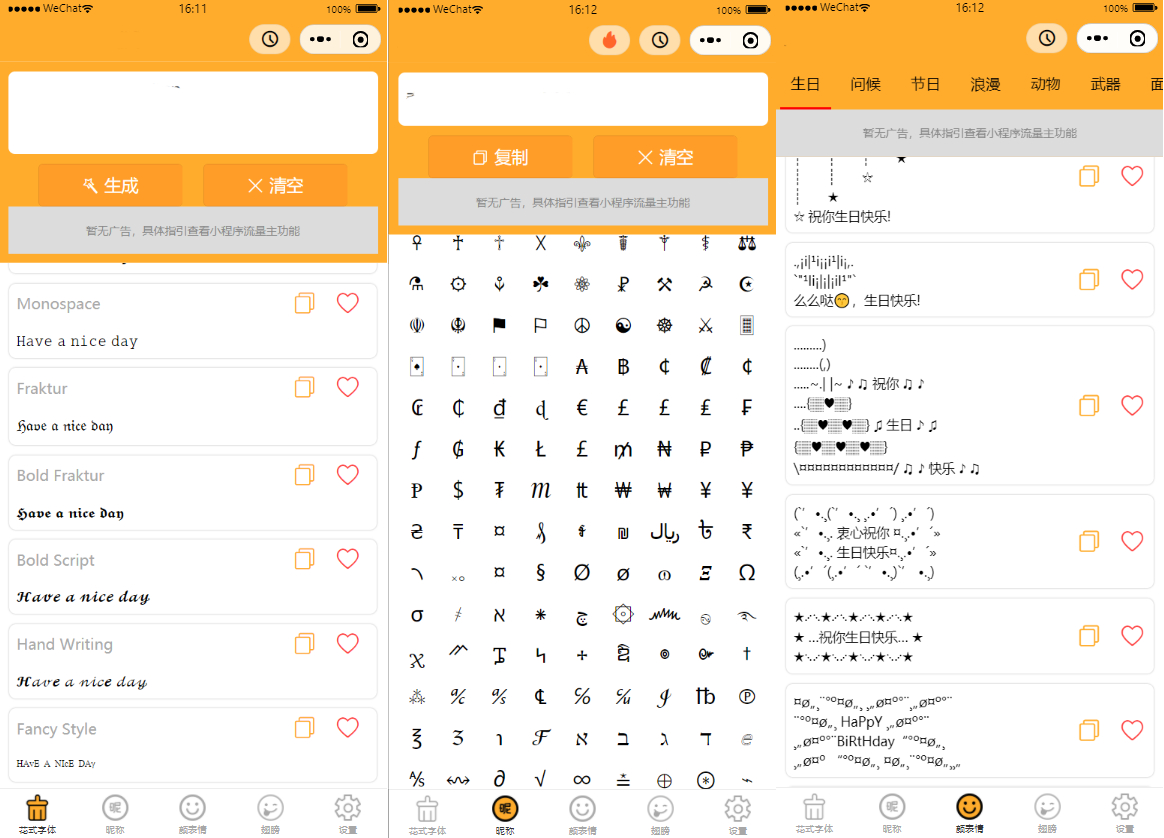
Font design symbol combination multifunctional wechat applet source code
随机推荐
Using fast parsing intranet penetration to realize zero cost self built website
[IELTS reading] Wang Xiwei reading P3 (heading)
华泰证券低佣金的开户链接安全吗?
Application of multi loop instrument in base station "switching to direct"
The company needs to be monitored. How do ZABBIX and Prometheus choose? That's the right choice!
PMP certificate renewal process
取得PMP证书需要多长时间?
Jar batch management gadget
跨域请求
Compare two vis in LabVIEW
一次edu证书站的挖掘
Galera cluster of MariaDB - dual active and dual active installation settings
[kotlin] the third day
Tester's algorithm interview question - find mode
ICML 2022 | 3dlinker: e (3) equal variation self encoder for molecular link design
Financial markets, asset management and investment funds
Observable time series data downsampling practice in Prometheus
圖解網絡:什麼是網關負載均衡協議GLBP?
MIT-6.824-lab4B-2022(万字思路讲解-代码构建)
IELTS examination process, what to pay attention to and how to review?