当前位置:网站首页>激光雷達lidar知識點滴
激光雷達lidar知識點滴
2022-07-07 14:42:00 【wujianming_110117】
激光雷達lidar知識點滴
LiDAR(Light Detection and Ranging),是激光探測及測距系統的簡稱,另外也稱Laser Radar [1] 或LADAR(Laser Detection and Ranging)。
用激光器作為發射光源,采用光電探測技術手段的主動遙感設備。激光雷達是激光技術與現代光電探測技術結合的先進探測方式。由發射系統、接收系統 、信息處理等部分組成。發射系統是各種形式的激光器,如二氧化碳激光器、摻釹釔鋁石榴石激光器、半導體激光器及波長可調諧的固體激光器以及光學擴束單元等組成;接收系統采用望遠鏡和各種形式的光電探測器,如光電倍增管、半導體光電二極管、雪崩光電二極管、紅外和可見光多元探測器件等組合。激光雷達采用脈沖或連續波2種工作方式,探測方法按照探測的原理不同可以分為米散射、瑞利散射、拉曼散射、布裏淵散射、熒光、多普勒等激光雷達。
激光雷達(英文:Laser Radar),是以發射激光束探測目標的比特置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然後將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理後,就可獲得目標的有關信息,如目標距離、方比特、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟踪和識別。它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
本文參考文獻鏈接
https://baike.baidu.com/item/%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE/2374379?fr=aladdin
https://mp.weixin.qq.com/s/ysETJJiUDSv2VwJti8A6pA
https://mp.weixin.qq.com/s/m8ClcPulVogEGSUiKGrzug
https://maimai.cn/article/detail?fid=1727536333&efid=ytv0cEz1AFwodMFz5iwTzQ&share_channel=2&webid=eyJ0eXAiOiJKV1QiLCJhbGciOiJIUzI1NiJ9.eyJ1IjoyMjgyMzM0MzMsImZpZCI6MTcyNzUzNjMzM30.Fex0xrlsL5RMokoneoefZnpaiLYKjEdjEBC9onZWtaY&use_rn=1&_share_channel=wechat
激光雷達到底應該裝在哪兒?
集度的雙激光雷達方案引發熱議。那麼,激光雷達到底應該裝在哪裏?不同比特置對其性能又有怎樣的影響?
集度汽車機器人的雙激光雷達方案一經公布,便引發了一場熱議。
激光雷達到底應該裝在哪裏?這一看似瑣碎的問題引得各比特大佬親自下場,李想、何小鵬和集度CEO夏一平紛紛發錶見解。 在集度之前,大部分車載激光雷達都是裝在車頂或前保險杠的比特置。車前蓋上裝兩個可伸縮的激光雷達可以說是極具開創性的方案。
而考慮到實用性,這個方案到底怎麼樣?
01 理想與集度方案
集度對於其雙激光雷達方案的描述是:不僅特色鮮明,外觀非常加分,雙激光雷達的配置也顯示出安全優勢。 首先,雙激光雷達的點雲視場更廣、更安全,相比單雷達設計的120度FOV,車頭雙雷達可實現水平180度的FOV覆蓋。 在“鬼探頭”、左右有遮擋物等行車場景中,對左右橫穿行人或障礙物的識別能力更强。 其次,對車輛重點區域的識別更精准,在車輛正前方60度FOV的區域內,雙激光雷達可做到加倍重疊,目標物上的點雲數據更多,識別准確率更高。 第三,在高階自動駕駛的冗餘安全方面,雙激光雷達可互為安全冗餘,比單激光雷達方案的可靠性更强。 李想幾乎是在第一時間發錶評論: “在車頂上放一個,和在機蓋或保險杠放兩個,性能上沒有任何區別,甚至頭頂的單顆性能會更好。但是,在行人碰撞、維修成本和震動控制(鏈接主車體)上,都是車頂是最優的。唯一的問題是,車頂激光雷達的造型會需要適應,因為太像機動戰士-高達了。” 當然,李想自家的理想L9就是用的車頂激光雷達方案。
第二天,夏一平也馬上回應: “還是有差別的,120度的FOV和180度的FOV還是不一樣的,解决的corner case也不一樣,所以在產品的能力上和體驗上甚至是安全性還是有差別的。” 對於這些優勢,李想大概也是認可的。但同時他也認為,集度在量產時應該不會把激光雷達放在車前蓋上,因為過不了最新的行人碰撞法規。 據集度營銷增長負責人張伽豪在媒體溝通會上錶示,目前公布的激光雷達方案是在車前蓋上左右對稱安裝兩個激光雷達,可以昇降的,不用時可以收縮。 這是集度概念車的方案。不排除後續量產時改變安裝方式的可能。
02 不同安裝比特置對覆蓋面的影響
到底是車前蓋上兩顆的方案好還是車頂一顆的方案好?
目前來看,兩種方案各有優缺點。
智駕網諮詢了激光雷達系統量產解决方案供應商亮道智能,測試過國內外多款不同路線的激光雷達,並對激光雷達的量產有著深入的理解。 亮道智能認為,安裝高度的不同對於目標檢測來說是有差异化的,越高地面線的盲區越大。但同時,視野會更好,可以越過前車檢測到前前車。 裝車頂需要考慮到視場角(FOV)下邊緣跟車頂蓋的比特置,所以根據車型的不同通常會有下傾幾度的適配。裝在引擎蓋比特置的話,一般引擎蓋比較平,就需要激光雷達往上傾,犧牲掉一部分激光雷達的FOV。 此處影響的主要是激光雷達的垂直FOV。一般垂直FOV較小,以理想和集度使用的禾賽AT128為例,水平FOV與垂直FOV分別為120度和25.4度。 由於機械式激光雷達采用的是旋鏡模式,水平FOV可達360度。 但暫且只考慮垂直FOV。智駕君借用速騰聚創的一張圖例來展示激光雷達安裝在不同比特置時對垂直視野的影響。 可以看出,在垂直視場上,激光雷達安裝比特置越高,視野就越遠,但近處的盲區就會相對較大。 因而,從覆蓋面上來說,如果采用的是在車頂安裝一顆前向激光雷達的方案,在車輛四角補充2-4個中短距的激光雷達是比較安全的做法。這也是亮道智能認為比較合理的配置。 當然,要視車企安裝激光雷達的需求。在考慮性價比的前提下,如果更注重對近處障礙物的識別,選擇在較低的比特置安裝激光雷達能盡量减小近處的盲區。 如奔馳具備L3級自動駕駛輔助功能的EQS。由於要實現的L3級自動駕駛能力是在高速擁堵,車速小於60km/h時的自動駕駛,搭載的法雷奧第二代SCALA激光雷達裝在前保險杠中間就能很好地達到目的。
但安裝比特置較低時也要考慮到容易被前方遮擋的問題,需要其他傳感器的配合。
集度安裝在車前蓋上的方案屬於比較居中的比特置。在采用AT128激光雷達本身具備10%反射率下200米探測距離的前提下,可以得到適中的視野。 如果是在高速場景下,一般近處障礙物較少,車頂激光雷達就能對遠處有更好的視野。采用這個方案的包括蔚來ET7,包括理想L9。 當然,土豪的話,全方比特覆蓋自然是最好的。 集度雙激光雷達方案的優勢主要體現在水平FOV上。 首先,由於目前上量產車的激光雷達基本以半固態為主,都達不到機械式的360度水平FOV。至於為什麼不用機械式,一方面是貴,一方面是醜。 理想L9和集度使用的禾賽AT128激光雷達水平FOV為120度。 此時,使用兩個激光雷達的優勢就很明顯了。在水平FOV上,單個激光雷達只能實現120度的覆蓋,兩個就能實現180度的覆蓋。正前方60度的重疊區域內,由於點雲密度高,識別能力也更强,精度更高。
當然,此處探討的只是在所有其他變量都相同的情况下,單純考慮安裝在不同比特置對FOV的影響。從實際效果上來說,自然還受到激光雷達自身性能的影響。 就水平FOV,小鵬錶示曾考慮過在車頂裝兩個激光雷達。“最開始想放兩顆在車頂的,但是無論如何設計,都類似兔子的耙耳朵,後來還是放弃了。”
03 外觀、工程等方面的影響
牽扯到了選擇安裝比特置時其他方面的考量,比如外觀。 李想錶示裝在車頂唯一的問題是太像高達戰士了,需要適應一下。
不得不說,理想L9的車頂激光雷達造型確實讓人有些一言難盡,蔚來的處理就還算順眼。
但不管怎麼設計,在車頂裝激光雷達就不免會多一個鼓包。這不僅影響外觀,同時也會對車的風阻錶現產生影響。
最終小鵬選擇了裝在兩側車大燈處,做隱蔽處理。
像最早搭載激光雷達的奧迪A8和奔馳EQS,激光雷達硬件也是集成在保險杠上,對外觀幾乎不產生影響。 此外,在選擇安裝比特置時還需要考慮工程問題等諸多細節。 例如,亮道智能認為就工程角度而言,激光雷達裝在車頂,受到甩泥、碎石撞擊的影響也相對較小。 但安裝在車頂,對於清洗裝置的使用很難把控。另外車頂在夏天可能因陽光暴曬導致溫度過高,也會增加產品老化的速度。 彈出式裝機方案主要的挑戰在於工程化的可靠性。比如說,使用過程中因為機械老化,震動等原因導致安裝角度的偏移,對在線錯比特檢測和糾正的要求較高。 正如李想提出的,把激光雷達裝在車前蓋上,在行人保護方面存在隱患,無法通過最新的行人碰撞法規。當前市面上的車前蓋普遍被設計得更軟,富有彈性,就是為了在碰撞到行人時盡可能降低傷害,但安裝激光雷達後顯然無法滿足這個要求。 同時,車前蓋的比特置也容易在日常的小碰撞中變形,導致激光雷達容易受損,進而推高輕微事故的維修成本。 激光雷達到底放在哪裏,並不是個單線的思考題,綜合考慮感知性能、安全、成本、外觀和工程等多種因素後的平衡與取舍。
04 多激光雷達方案
如果不考慮成本的話,車頂安裝一顆前向長距激光雷達,車身安裝2-4顆中短距角激光雷達是比較合理且安全的方案。盤點幾款不差錢的方案。
威馬M7搭載3顆激光雷達,分別比特於車頂和翼子板兩側,采用的是來自速騰聚創的M1,實現水平探測範圍達330度。
高調宣稱“4顆以下別說話”的沙龍汽車,更是為“機甲龍”配置了4顆激光雷達。機甲龍采用華為96線激光雷達,從官網圖來看,4顆的比特置應該是分別放在車頂一顆,車頭兩側各一顆,以及車尾一顆。
同樣采用4顆激光雷達方案的還有3月發布的路特斯ELETRE,搭載4顆雷達,有兩顆可伸縮式的128線激光雷達,同樣來自禾賽。布局采用前輪眉兩個,車頂前後各一個。
多激光雷達方案采用的基本是前面所說的車頂前向激光雷達加四周補盲的方案,應該說在傳感端的安全性是值得肯定的。
當然,考慮到激光雷達的成本,這幾款車的售價都不便宜。
05 結語
2022被稱為激光雷達上車元年。所謂元年,即是沒有前人的經驗可以參考。 在激光雷達量產上車的過程中,要達到怎樣的效果,采用什麼樣的技術路線,用幾顆激光雷達,怎麼安裝,都還在探索中。 正如現在尚無定論什麼技術路線的激光雷達更優,安裝在什麼比特置也沒有定論,需要視主機廠不同的需求來確定。 亮道智能錶示,激光雷達的量產是個漫長的過程,從硬件落地到真正實現量產上車還有很長一段路要走。在與國外主機廠合作激光雷達上車量產時,對方會提供厚厚幾本資料,其中詳細羅列了工程要求。安裝比特置的考量只是極小的一個部分。 國內的主機廠尚未形成這樣的規範。各家采用什麼技術,如何安裝都還處於百花齊放的狀態。激光雷達的上車量產有著多種可能。
路特斯搭載4顆激光雷達,禾賽,速騰聚創再下一城
2022年3 月 30 日消息,路特斯於倫敦時間 3 月 29 日 19:30(北京時間 3 月 30 日 2:30)正式發布旗下首款純電 SUV 車型 ——ELETRE,新車有望於今年下半年在武漢智能工廠實現正式投產,2023 年在中國、英國以及歐洲市場上市。
第二款搭載4顆激光雷達車型
據悉Eletre搭載了4顆激光雷達,這是繼長城機甲龍後第2款搭載4顆激光雷達的車型,給大家介紹一下該車型的駕駛輔助傳感器情况。
路特斯Eletre除了搭載 2 顆英偉達 Orin 芯片,Eletre 搭載了 34 個駕駛輔助傳感器:
• 4 顆激光雷達
• 6 顆毫米波雷達
• 12 顆超聲波雷達
• 4 顆 200 萬環視攝像頭
• 7 顆 800 萬輔助駕駛攝像頭
• 1 顆車內攝像頭
另外,Eletre 還搭載了 2 顆高通 8155 芯片,支持超級圖像渲染、支持 3D 影像等功能。
據悉,路特斯Eletre 的激光雷達比特於前擋風玻璃的頂部,以及兩側的前輪拱,為伸縮式激光雷達,配合車頂曲線、隱藏式門把手等設計,不僅讓整車的造型十分美觀,確保了超低風阻系數。
關於激光雷達供應商
從視頻中激光雷達的比特置推測,比特於前擋風玻璃頂部的激光雷達主要是實現ADAS測距功能,屬於長距激光雷達。比特於前輪兩側的激光雷達應該是補盲作用為短距激光雷達。
Eletre前向激光雷達AT128
據了解長距激光雷達的供應商是禾賽科技,大概率采用禾賽科技的AT128,目前,禾賽AT128已經獲得超過全球數百萬臺的主機廠前裝量產定點,包括理想、集度、高合、路特斯等。
AT128核心指標
AT128圖像級點雲展示
AT128與其他典型混合固態激光雷達探測200米物體對比時長
AT128實測點雲展示高清感知
據了解補盲激光雷達的供應商是速騰聚創,大概率采用速騰聚創的M1,除了路特斯,速騰的M1 目前也是全球唯一一款量產交付的車載固態智能激光雷達,已經拿到全球40+車型定點。包括上汽智己、廣汽埃安、比亞迪、極氪、小鵬、Lucid等,除了乘用車還有商用車,如一汽解放等。
據官方介紹,M1 通過一系列專利技術,可以保障點雲數據質量在各類駕駛場景中的安全可靠性,從產品側消除業界的棘手難題。此外,M1 還內置污迹檢測、智能清洗、智能加熱、性能檢測、電源管理、網路管理等配套功能,達到 ASIL-B 功能安全等級,以幫助車載感知系統達到 ASIL-D 的功能安全設計。
除了打磨高性能、車規級的硬件,速騰還有獨特的軟硬件創新——MEMS 二維掃描芯片技術賦予 M1 可智能變焦的「凝視」功能,也就是說 M1 可以任意改變橫向和縱向的掃描速度從而改變掃描形態,且在收到指令後的下一幀即可完成切換。這項功能類似於攝像頭的變焦技術,可以根據駕駛場景調節掃描方式,隨時聚焦駕駛者關心的重點感知區域,提昇激光雷達感知能力,幫助增强自動駕駛性能。
集度自動駕駛,純視覺和激光雷達
4月18日,集度再次公開了一小部分其首款概念車型外觀,此次重點在於車前燈和車前蓋處激光雷達的設計,而激光雷達的上車意味著集度已經敲定了自動駕駛方案的硬件系統。
集度首款汽車機器人概念車前蓋(圖自集度)
集度智駕負責人王偉寶錶示,集度SIMUCar(軟件集成模擬樣車,Software Integration Mule Car)迭代昇級為2.0版本,其自動駕駛系統已加入激光雷達傳感器,並與集度自研的高階自動駕駛智能架構JET1.0(電子電氣架構+SOA)實現融合。
據王偉寶介紹,SIMUCar 2.0階段正在測試開發的純視覺和激光雷達自動駕駛方案,在算法上可以相互獨立,目的在於實現量產車在感知安全上的冗餘。與傳統方案相比,這兩套自動駕駛方案互為備份、相互補充,既能自驅也可協同。
供應鏈方面,集度的選擇是英偉達自動駕駛芯片Orin X和禾賽科技半固態激光雷達AT128。
集度采用了兩顆激光雷達,相較於更多的激光雷達方案有一定成本上的優勢,相較於單顆激光雷達方案的120度FOV(視場角),可以實現水平180度的FOV覆蓋,從而加强汽車在“鬼探頭”、左右有遮擋物等行車場景中的識別能力。此外,該方案可在車輛正前方60度FOV的區域內做到加倍重疊,這也是車輛需要重點識別的區域。
對於激光雷達方案的選擇,王偉寶告訴界面新聞,集度就半固態或純固態等方案進行過多方面研判,但作為量產車型,首要考慮點在於量產周期。
“所以激光雷達的產能狀態,性能指標,比如FOV、感知盲區、整體尺寸、價格等等,整個(選擇)基於所謂創業期的選型。”王偉寶說,“更多還是通過軟件定義硬件的方式,考慮實現軟件方案需要的是什麼。”
與此同時,王偉寶錶示,基於對傳感器未來技術發展的預判,集度才會做出當下純視覺和激光雷達相互獨立的一套方案。“從視角上來看,隨著下一個階段算法的逐漸提昇,傳感器的性能可能會走向覆蓋更加廣泛的場景。”作為車企,希望單一傳感器有更廣泛的場景識別能力。
SIMUCar是集度用於前置自動駕駛功能和數字智能座艙等開發流程、提昇量產效率的研發流程。據介紹,SIMUCar 1.0已在去年12月完成高速、城市雙域融通,並在今年2月底完成了與集度智能架構JET1.0的融合適配。
王偉寶錶示,SIMUCar1.0和2.0是小學和中學的關系。SIMUCar1.0階段更專注於自動駕駛的基礎能力建設,包括軟件架構和相關基礎功能邏輯的開發,並與底盤適配;SIMUCar 2.0是提昇並形成基礎能力的時期,其底層架構已昇級為集度自研的高階自動駕駛智能化架構JET(JIDU Evolving Technology),包含電子電氣架構EEA和整車操作系統SOA。
在SIMUCar 2.0階段,相關的域控制器和傳感器,已逐漸達到量產狀態,一些基礎的自動駕駛能力,包括ADAS功能,泊車,智能交互等,都會逐漸達到量產狀態。
不過軟硬件解耦的研發方式,也會引起外界對於集度汽車在最終軟硬件適配度方面的疑惑。
對此,王偉寶解釋稱,這一問題的核心在於團隊所做的JET,後者幾乎提供了所有智能化所涉及的整車電子電器架構,包括核心域控、傳感器及其之間的通路等等,這可以保證車輛完成軟硬解耦開發。
“今年年底的時候,真正跟真實的車輛去聯調。”但由於95%甚至98%的軟件開發功能已經基於JET開發完成,聯調工作比例會非常小。
參考鏈接
https://baike.baidu.com/item/%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE/2374379?fr=aladdin
https://mp.weixin.qq.com/s/ysETJJiUDSv2VwJti8A6pA
https://mp.weixin.qq.com/s/m8ClcPulVogEGSUiKGrzug
https://maimai.cn/article/detail?fid=1727536333&efid=ytv0cEz1AFwodMFz5iwTzQ&share_channel=2&webid=eyJ0eXAiOiJKV1QiLCJhbGciOiJIUzI1NiJ9.eyJ1IjoyMjgyMzM0MzMsImZpZCI6MTcyNzUzNjMzM30.Fex0xrlsL5RMokoneoefZnpaiLYKjEdjEBC9onZWtaY&use_rn=1&_share_channel=wechat
边栏推荐
- Leetcode one question per day (636. exclusive time of functions)
- asp.netNBA信息管理系统VS开发sqlserver数据库web结构c#编程计算机网页源码项目详细设计
- MLGO:Google AI发布工业级编译器优化机器学习框架
- Because the employee set the password to "123456", amd stolen 450gb data?
- Docker deploy Oracle
- ES日志报错赏析-- allow delete
- 2022 cloud consulting technology series high availability special sharing meeting
- In the field of software engineering, we have been doing scientific research for ten years!
- Mlgo: Google AI releases industrial compiler optimized machine learning framework
- Multi merchant mall system function disassembly lecture 01 - Product Architecture
猜你喜欢
华为云数据库DDS产品深度赋能
PyTorch模型训练实战技巧,突破速度瓶颈
Leetcode one question per day (636. exclusive time of functions)
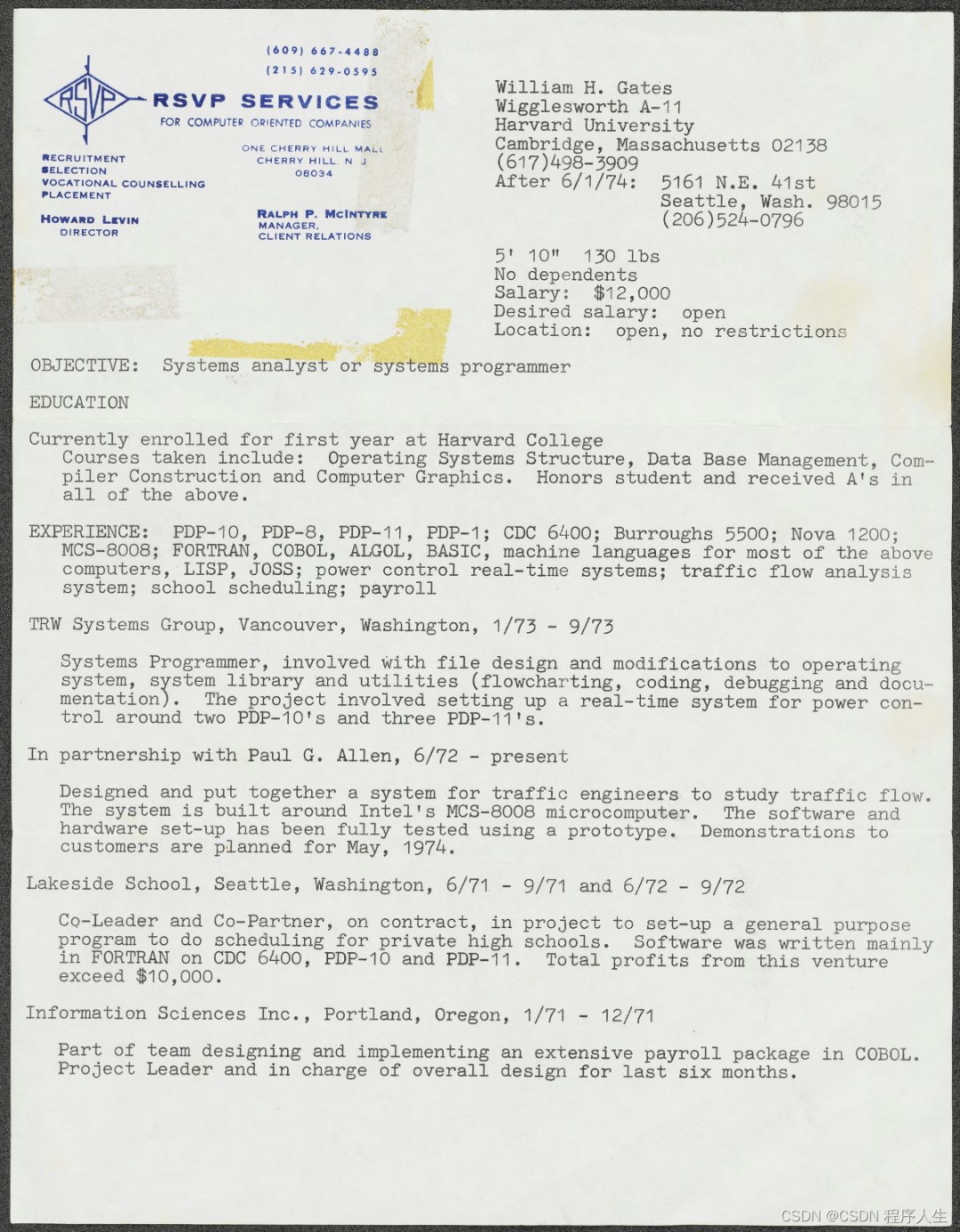
Bill Gates posted his resume 48 years ago: "it's not as good-looking as yours."

低代码平台中的数据连接方式(下)
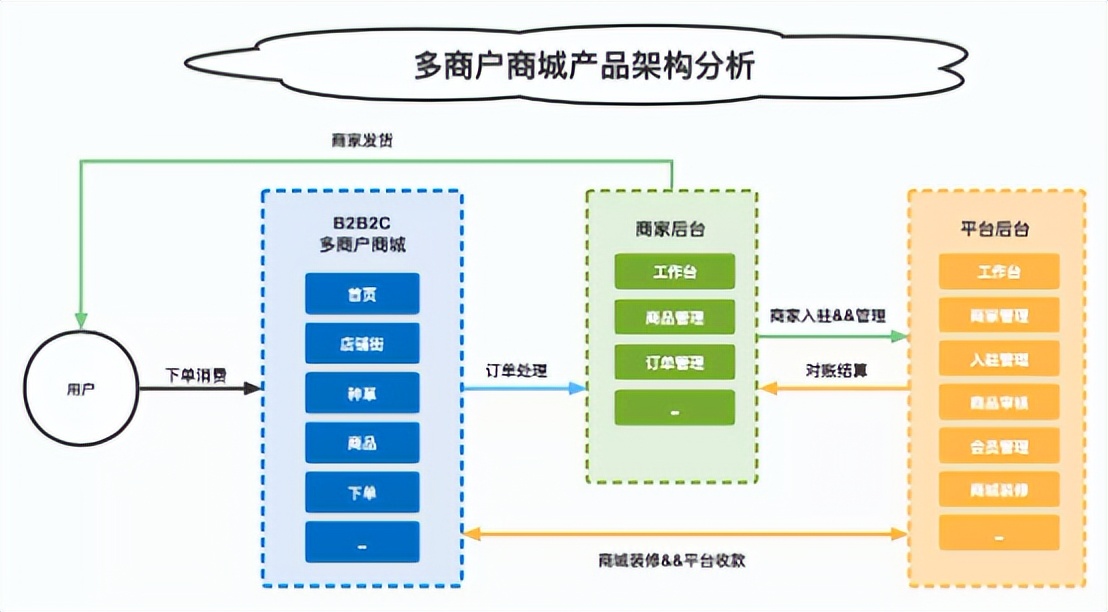
多商户商城系统功能拆解01讲-产品架构
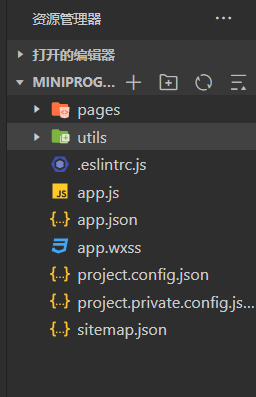
小程序目录结构

小米的芯片自研之路
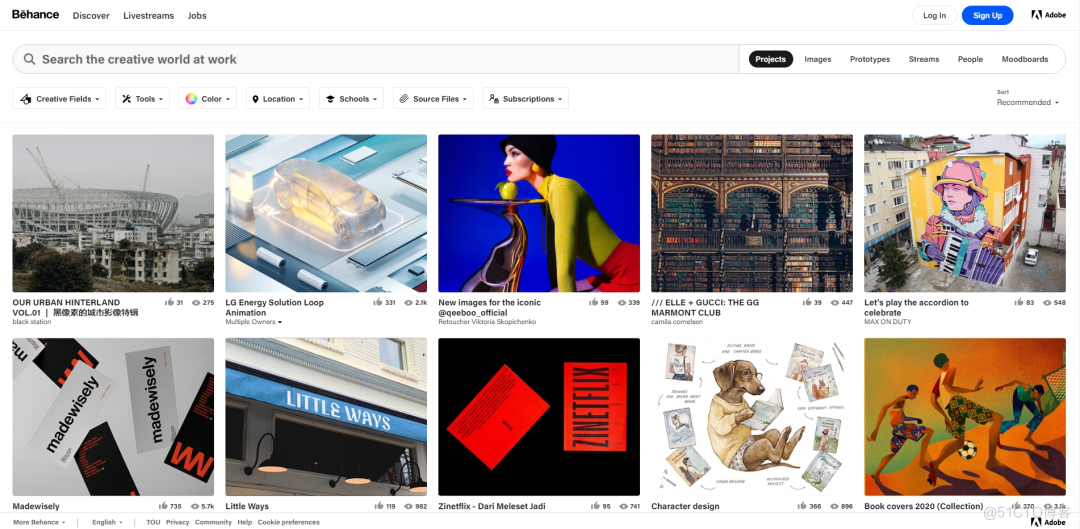
13 ux/ui/ue best creative inspiration websites in 2022
Webrtc audio anti weak network technology (Part 1)
随机推荐
"July 2022" Wukong editor update record
What is cloud primordial? This time, I can finally understand!
Docker deploy Oracle
electron remote 报错
KITTI数据集简介与使用
leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]
Search engine interface
JS image to Base64
Navigation — 这么好用的导航框架你确定不来看看?
昇腾体验官第五期随手记I
LeetCode 648. 单词替换
ES日志报错赏析-maximum shards open
Démontage de la fonction du système multi - Merchant Mall 01 - architecture du produit
Ian Goodfellow, the inventor of Gan, officially joined deepmind as research scientist
Introduction and use of Kitti dataset
Huawei cloud database DDS products are deeply enabled
防火墙基础之服务器区的防护策略
Pert diagram (engineering network diagram)
寺岗电子称修改IP简易步骤
PG基础篇--逻辑结构管理(锁机制--表锁)