当前位置:网站首页>【机器学习 03】拉格朗日乘子法
【机器学习 03】拉格朗日乘子法
2022-07-07 08:30:00 【ECCUSXR】
目录
1 与原点的最短距离

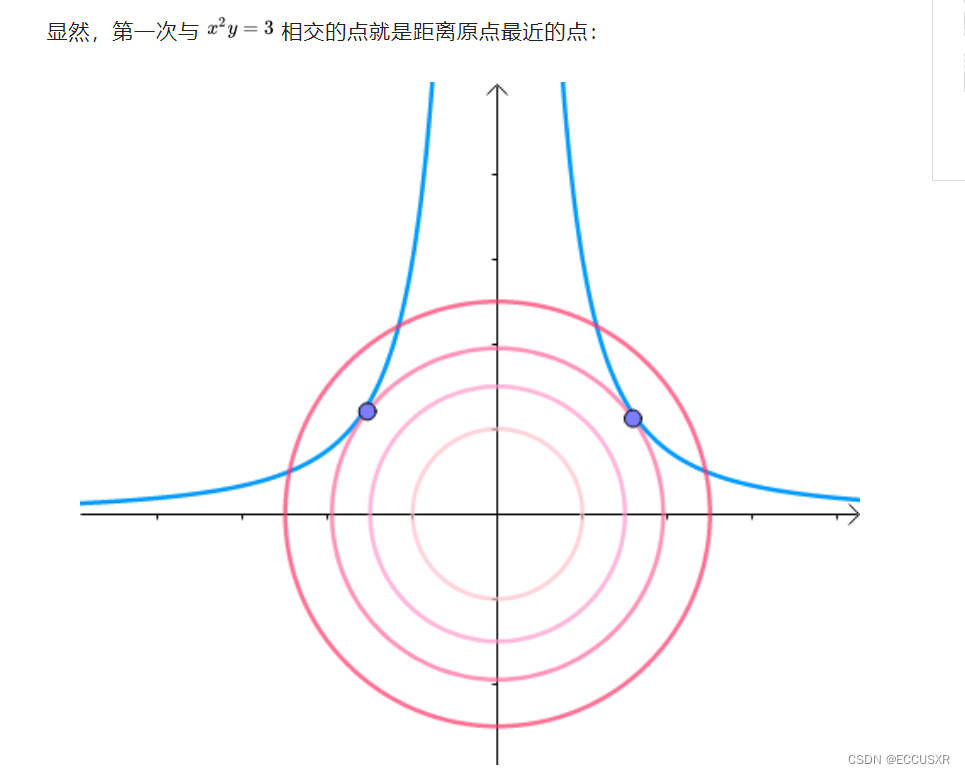
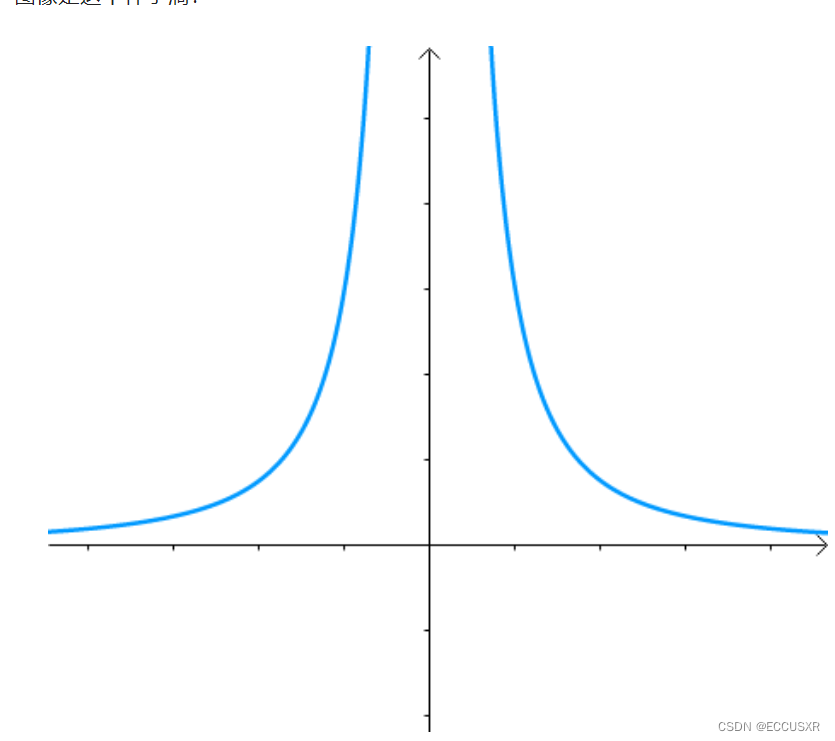 现在我们想求其上的点与原点的最短距离:
现在我们想求其上的点与原点的最短距离:
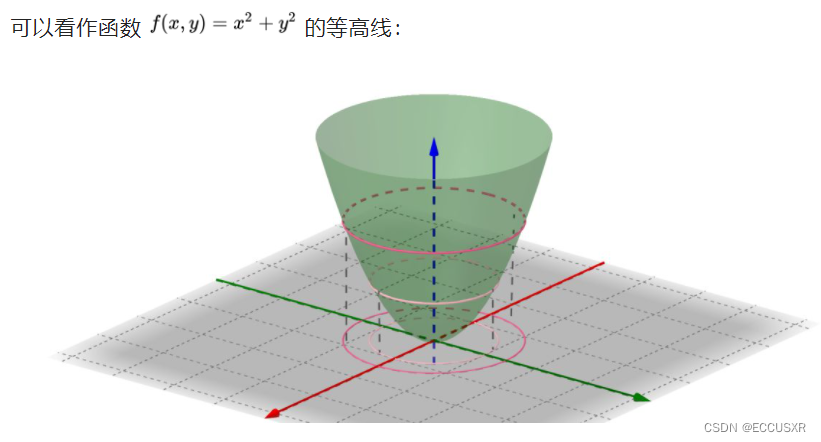
2 等高线

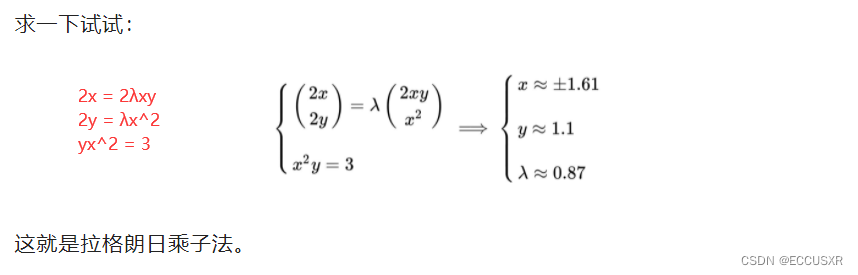
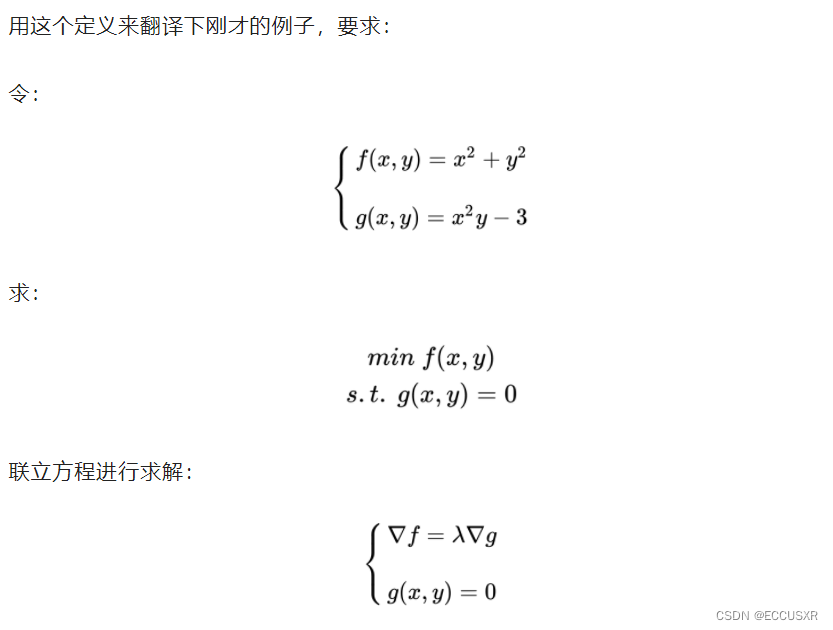
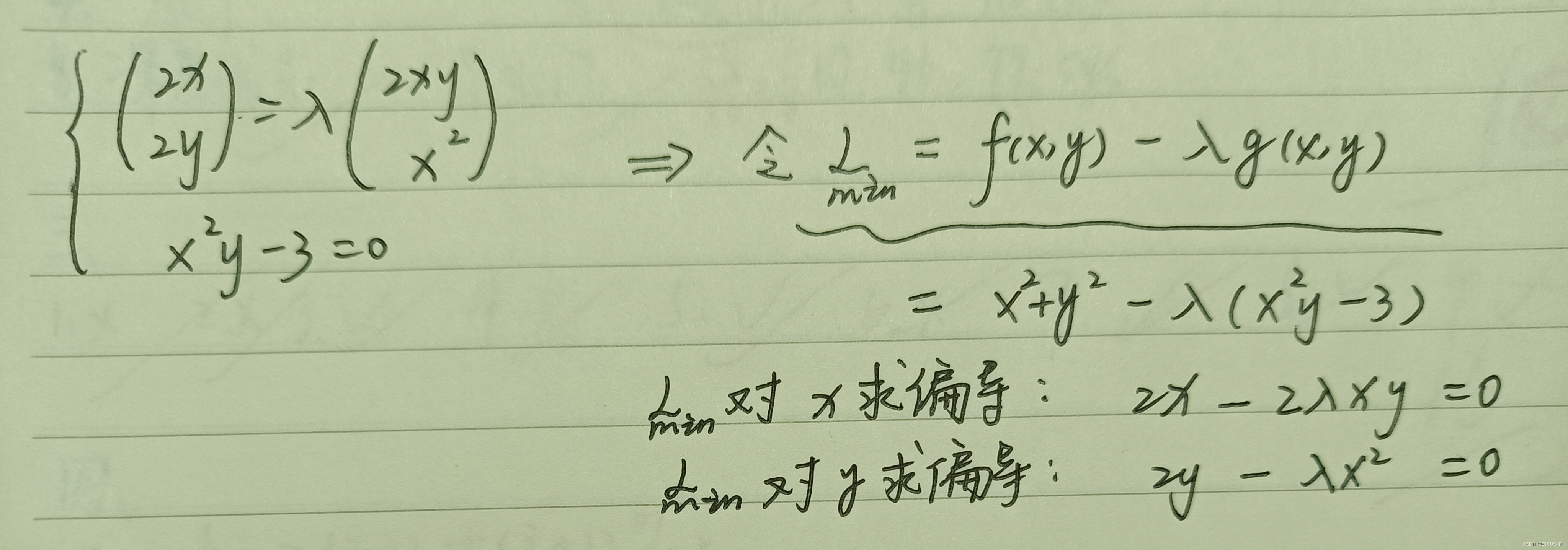
3 拉格朗日乘子法


 4 拉格朗日乘子法 定义
4 拉格朗日乘子法 定义

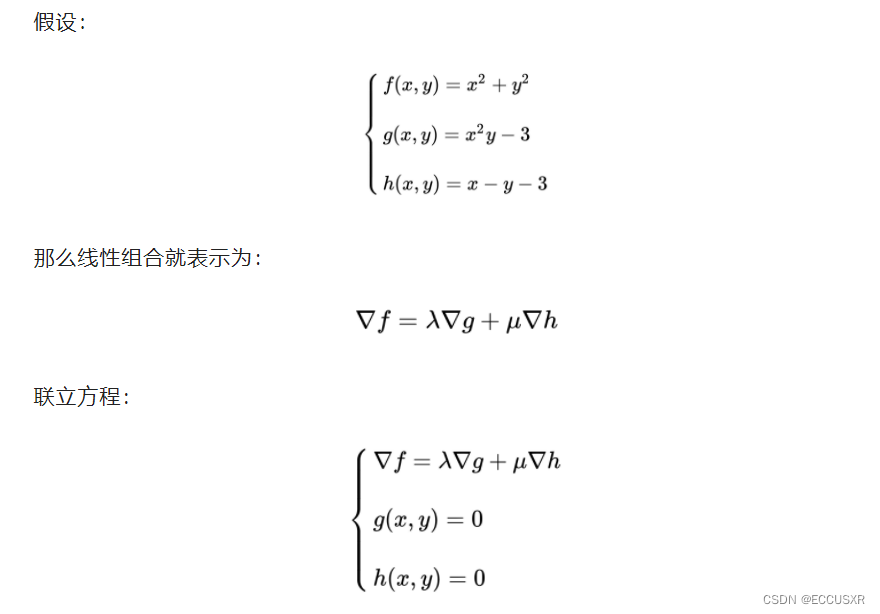
5 多个约束条件


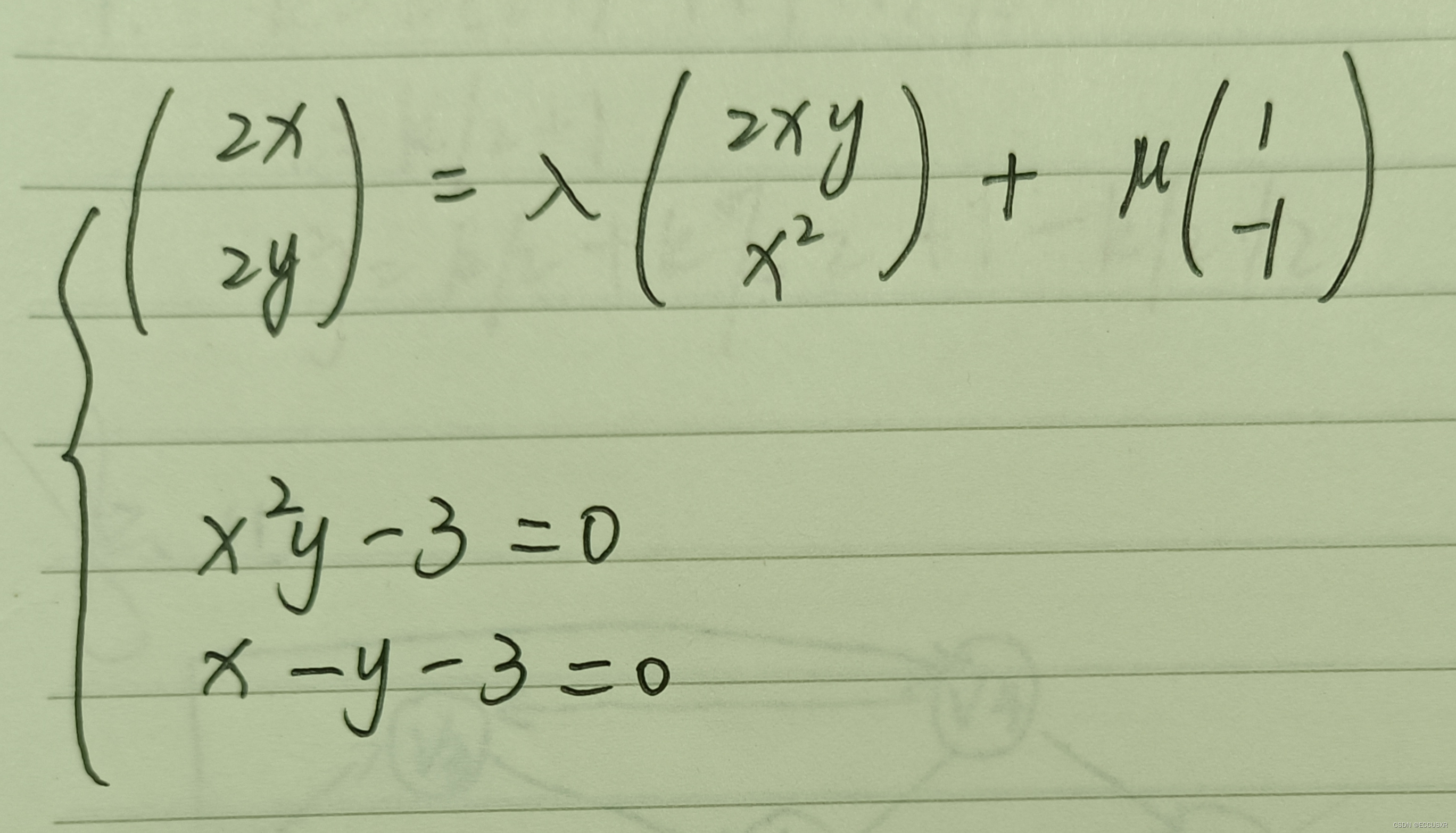
4 不等式约束下的极值
直接看第二个链接
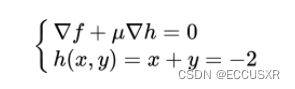
链接中 4.3 新增的条件 讲述 为什么在不等式约束下,上面第一个式子等于0。
目标函数和梯度下降函数的方向相反。
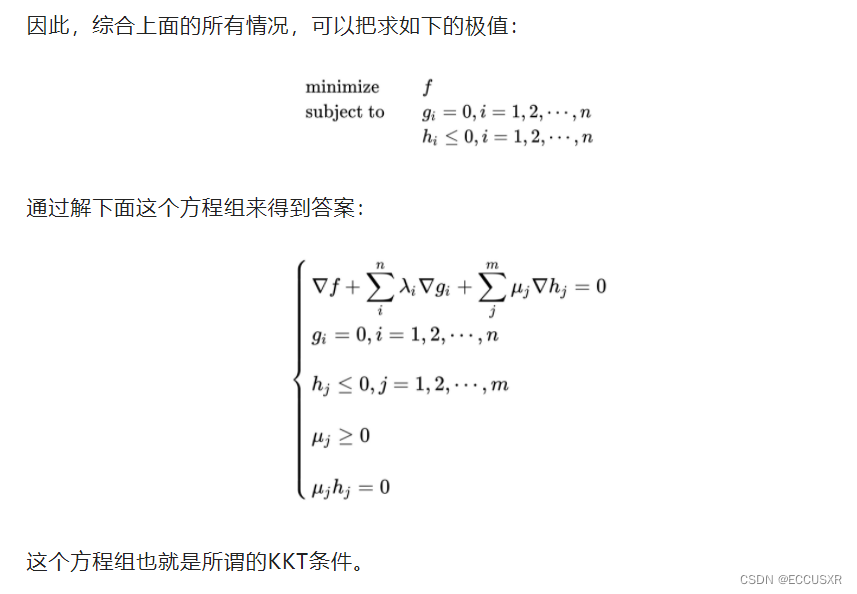
5 KTT条件
边栏推荐
- 求方程ax^2+bx+c=0的根(C语言)
- Prototype and prototype chain
- 对word2vec的一些浅层理解
- How embedded engineers improve work efficiency
- Jump to the mobile terminal page or PC terminal page according to the device information
- Schnuka: machine vision positioning technology machine vision positioning principle
- When there are pointer variable members in the custom type, the return value and parameters of the assignment operator overload must be reference types
- Easyexcel read write simple to use
- Leetcode-304: two dimensional area and retrieval - matrix immutable
- I'd rather say simple problems a hundred times than do complex problems once
猜你喜欢

高级软考(网络规划设计师)该如何备考?
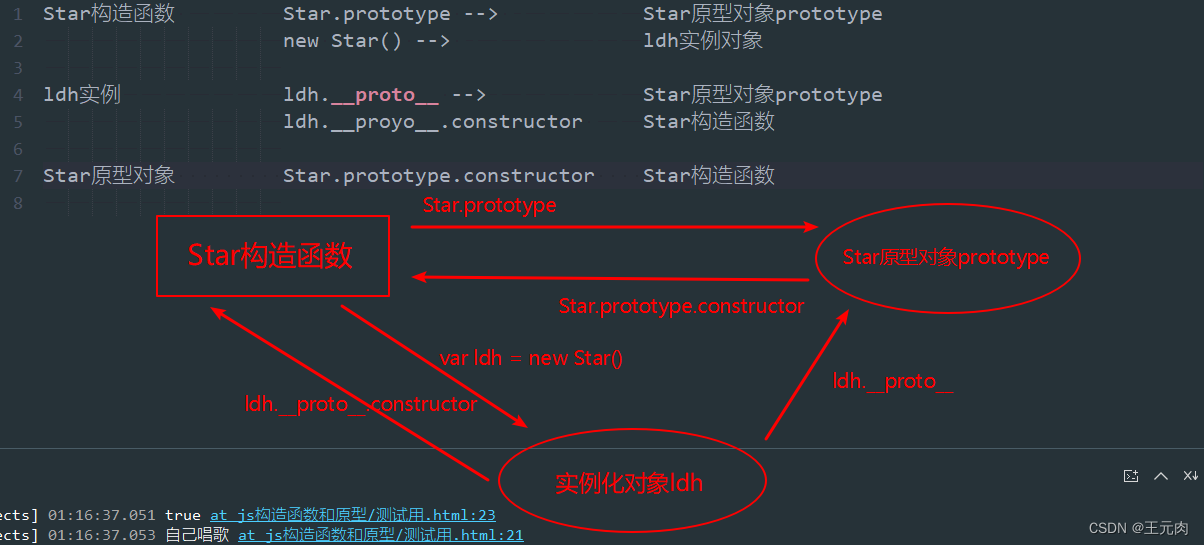
Prototype and prototype chain
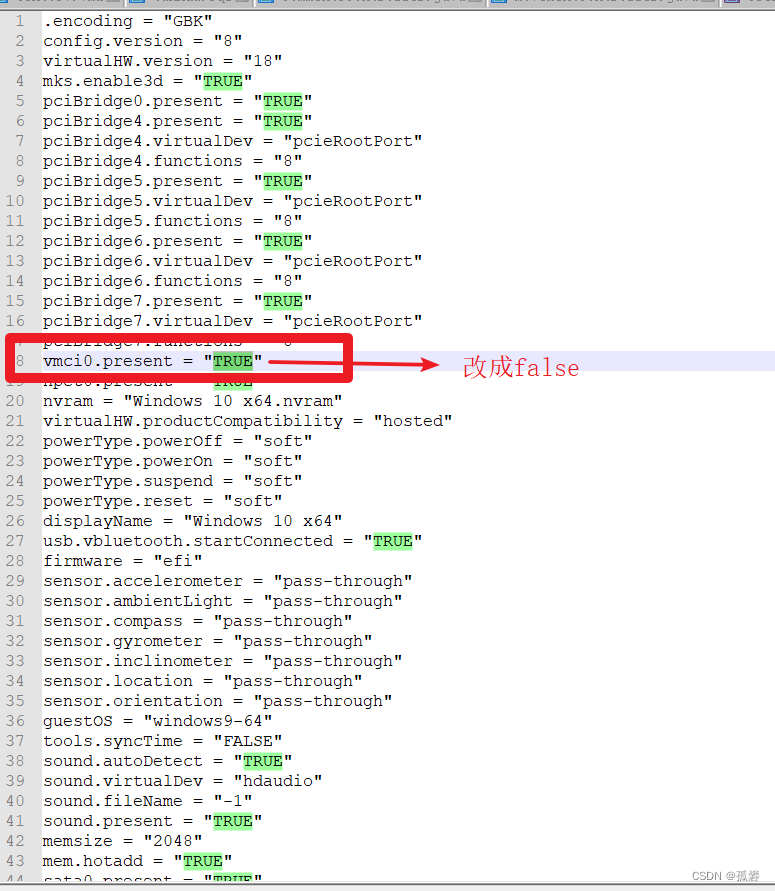
无法打开内核设备“\\.\VMCIDev\VMX”: 操作成功完成。是否在安装 VMware Workstation 后重新引导? 模块“DevicePowerOn”启动失败。 未能启动虚拟机。
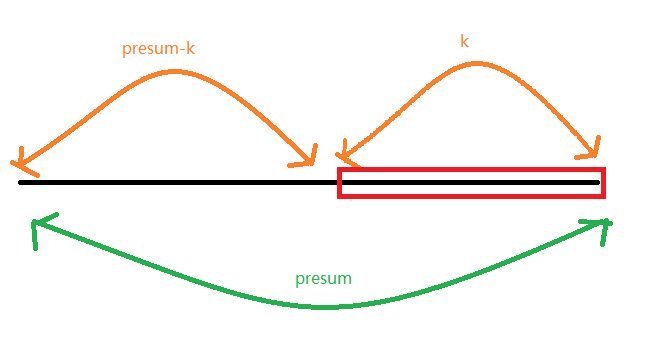
Leetcode-560: subarray with sum K
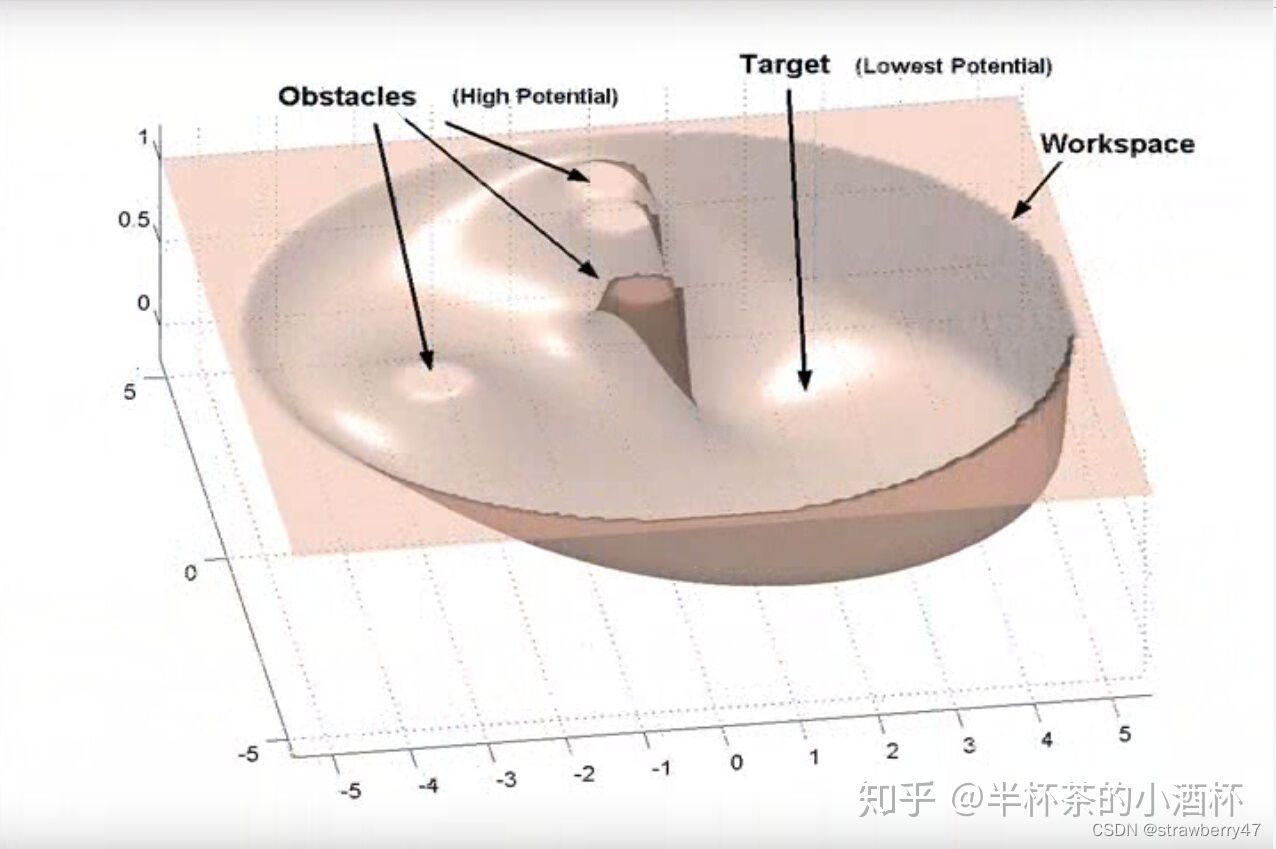
Trajectory planning for multi robot systems: methods and Applications Overview reading notes
![[牛客网刷题 Day5] JZ77 按之字形顺序打印二叉树](/img/ba/b2dfbf121798757c7b9fba4811221b.png)
[牛客网刷题 Day5] JZ77 按之字形顺序打印二叉树

Pre knowledge reserve of TS type gymnastics to become an excellent TS gymnastics master
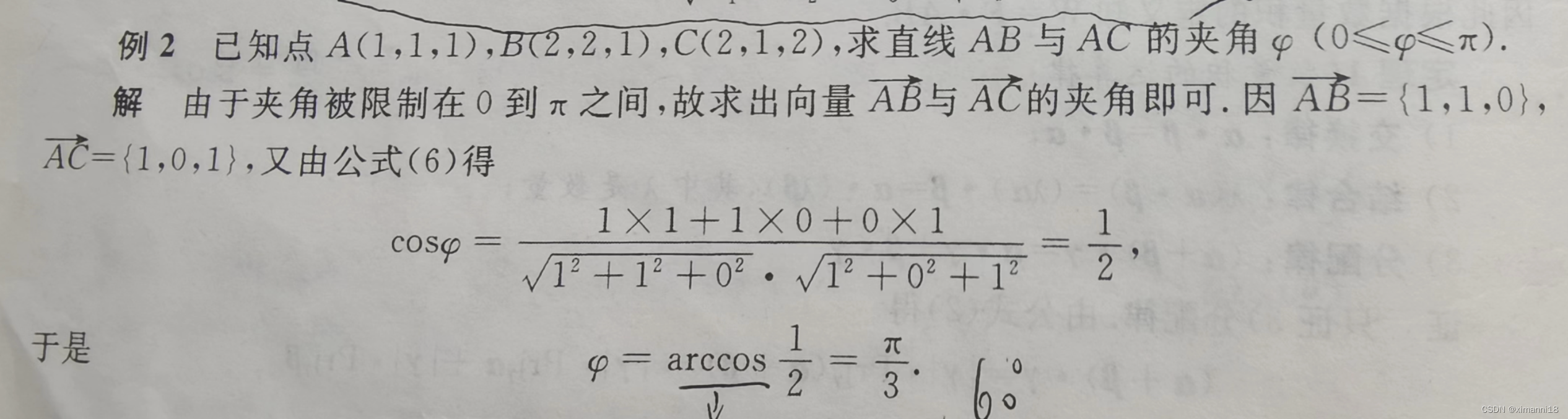
High number_ Chapter 1 space analytic geometry and vector algebra_ Quantity product of vectors
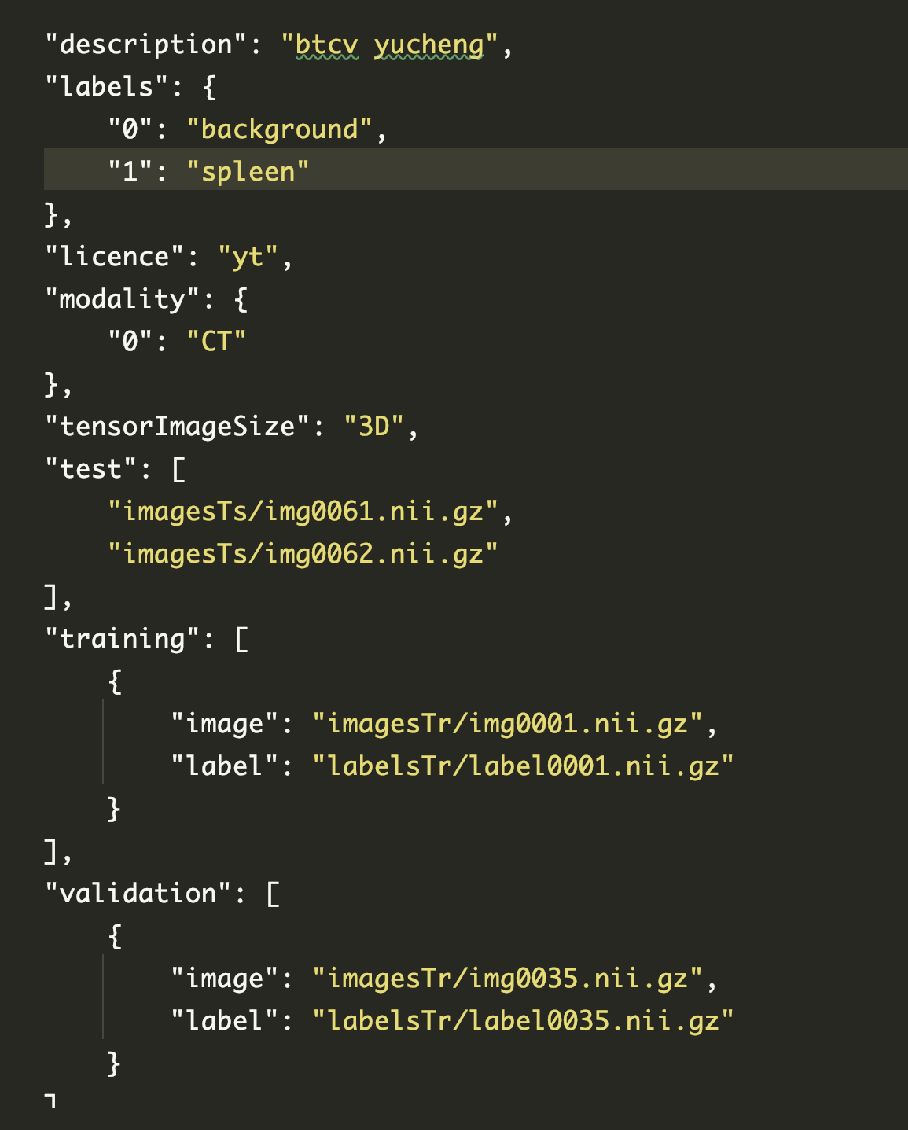
使用 load_decathlon_datalist (MONAI)快速加载JSON数据
Prototype object in ES6
随机推荐
leetcode-303:区域和检索 - 数组不可变
Leetcode-560: subarray with sum K
宁愿把简单的问题说一百遍,也不把复杂的问题做一遍
求方程ax^2+bx+c=0的根(C语言)
ThreadLocal is not enough
How embedded engineers improve work efficiency
@Transcation的配置,使用,原理注意事项:
深入分析ERC-4907协议的主要内容,思考此协议对NFT市场流动性意义!
Some superficial understanding of word2vec
Multisim -- software related skills
High number_ Chapter 1 space analytic geometry and vector algebra_ Quantity product of vectors
Leetcode-303: region and retrieval - array immutable
mysql插入数据创建触发器填充uuid字段值
施努卡:机器视觉定位技术 机器视觉定位原理
【acwing】786. Number k
IO模型复习
[homework] 2022.7.6 write your own cal function
【STM32】STM32烧录程序后SWD无法识别器件的问题解决方法
2022.7.4DAY596
根据设备信息进行页面跳转至移动端页面或者PC端页面