当前位置:网站首页>[pytorch modifies the pre training model: there is little difference between the measured loading pre training model and the random initialization of the model]
[pytorch modifies the pre training model: there is little difference between the measured loading pre training model and the random initialization of the model]
2022-07-05 11:48:00 【Network starry sky (LUOC)】
List of articles
1. pytorch Pre training model
The training of convolutional neural network is time-consuming , In many cases, it is impossible to train the network every time from the random initialization parameters .pytorch Several commonly used deep learning network pre training models are included in , Such as VGG、ResNet etc. . Often in order to speed up the progress of learning , At the beginning of training, we directly load pre-train Pre trained parameters in the model ,model The loading of is as follows :
import torchvision.models as models
#resnet
model = models.ResNet(pretrained=True)
model = models.resnet18(pretrained=True)
model = models.resnet34(pretrained=True)
model = models.resnet50(pretrained=True)
#vgg
model = models.VGG(pretrained=True)
model = models.vgg11(pretrained=True)
model = models.vgg16(pretrained=True)
model = models.vgg16_bn(pretrained=True)
2. Modify the number of full connection layer categories
The pre training model is based on resnet50 For example .
model = torchvision.models.resnet50(pretrained=True)
# extract fc Fixed parameters in layer
fc_features = model.fc.in_features
# Change the category to 10, Redefine the last layer
model.fc = nn.Linear(fc_features ,10)
print(model.fc)
Or directly transfer in the number of categories :
self.resnet = torchvision.models.resnet50(pretrained=False,num_classes=10)
3. Modify the convolution of a certain layer
The pre training model is based on resnet50 For example .
model = torchvision.models.resnet50(pretrained=True)
# Redefine the number of input channels of the first layer convolution
model.conv1 = nn.Conv2d(4, 64, kernel_size=7, stride=2, padding=3, bias=False)
4. Modify the convolution of certain layers
4.1 Remove the last two layers (fc Layer and the pooling layer )
The pre training model is based on resnet50 For example .
nn.module Of model It contains a called children() Function of , This function can be used to extract model The network structure of each layer , On this basis, it can be modified , The modification method is as follows ( Remove the last two layers ):
resnet_50_s = torchvision.models.resnet50(pretrained=False)
resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2])
self.resnet = resnet_layer
After removing the pre training resnet The last two layers of the model (fc Layer and the pooling layer ) after , Add a new upper sampling layer 、 Pool layer and classification layer , The code to build the network is as follows :
class Net_resnet50_upsample(nn.Module):
def __init__(self):
super(Net_resnet50_upsample, self).__init__()
self.conv = nn.Conv2d(1, 3, kernel_size=1)
resnet_50_s = torchvision.models.resnet50(pretrained=False)
resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2])
self.resnet = resnet_layer
# print(self.resnet)
self.up7to14=nn.UpsamplingNearest2d(scale_factor=2)
self.avgpool=nn.AvgPool2d(7,stride=2)
self.fc = nn.Sequential(
nn.Linear(2048 * 4 * 4, 1024),
nn.ReLU(inplace=True),
nn.Linear(1024, 128),
nn.ReLU(inplace=True),
nn.Linear(128, 10))
def forward(self, x):
x = self.conv(x)
x = self.resnet(x)
x=self.up7to14(x)
x=self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
4.2 Add or remove multiple convolution layers
Sometimes it is necessary to modify the hierarchy in the network , At this time, only the method of parameter coverage can be used , That is to define a similar network first , Then extract the parameters in the pre training to their own network . Here we use resnet Examples of pre training models .
# coding=UTF-8
import torchvision.models as models
import torch
import torch.nn as nn
import math
import torch.utils.model_zoo as model_zoo
#Bottleneck It's a class It defines the use of 1*1 A residual block for dimension reduction and dimension increase with the convolution kernel of , Can be in github resnet pytorch Check out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
# Layers that are not modified cannot be named randomly , Otherwise, the pre training weight parameter cannot be passed in
class CNN(nn.Module):
def __init__(self, block, layers, num_classes=9):
self.inplanes = 64
super(CNN, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1,1))
# Add a new anti roll layer
self.convtranspose1 = nn.ConvTranspose2d(2048, 2048, kernel_size=3, stride=1, padding=1, output_padding=0,
groups=1, bias=False, dilation=1)
# Add a maximum pooling layer
self.maxpool2 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
# Remove the original fc layer , Add a new one fclass layer
self.fclass = nn.Linear(2048, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
# Newly added layer forward
x = x.view(x.size(0), -1)
x = self.convtranspose1(x)
x = self.maxpool2(x)
x = x.view(x.size(0), -1)
x = self.fclass(x)
return x
# load model
resnet50 = models.resnet50(pretrained=False)
print(resnet50)
cnn = CNN(Bottleneck, [3, 4, 6, 3]) #3 4 6 3 respectively layer1 2 3 4 in Bottleneck The number of modules .res101 Then for 3 4 23 3
# Read parameters
pretrained_dict = resnet50.state_dict()
model_dict = cnn.state_dict()
# take pretrained_dict It doesn't belong to model_dict Key out of
pretrained_dict = {
k: v for k, v in pretrained_dict.items() if k in model_dict}
# Update existing model_dict
model_dict.update(pretrained_dict)
# Load what we really need state_dict
cnn.load_state_dict(model_dict)
# print(resnet50)
print(cnn)
Results contrast :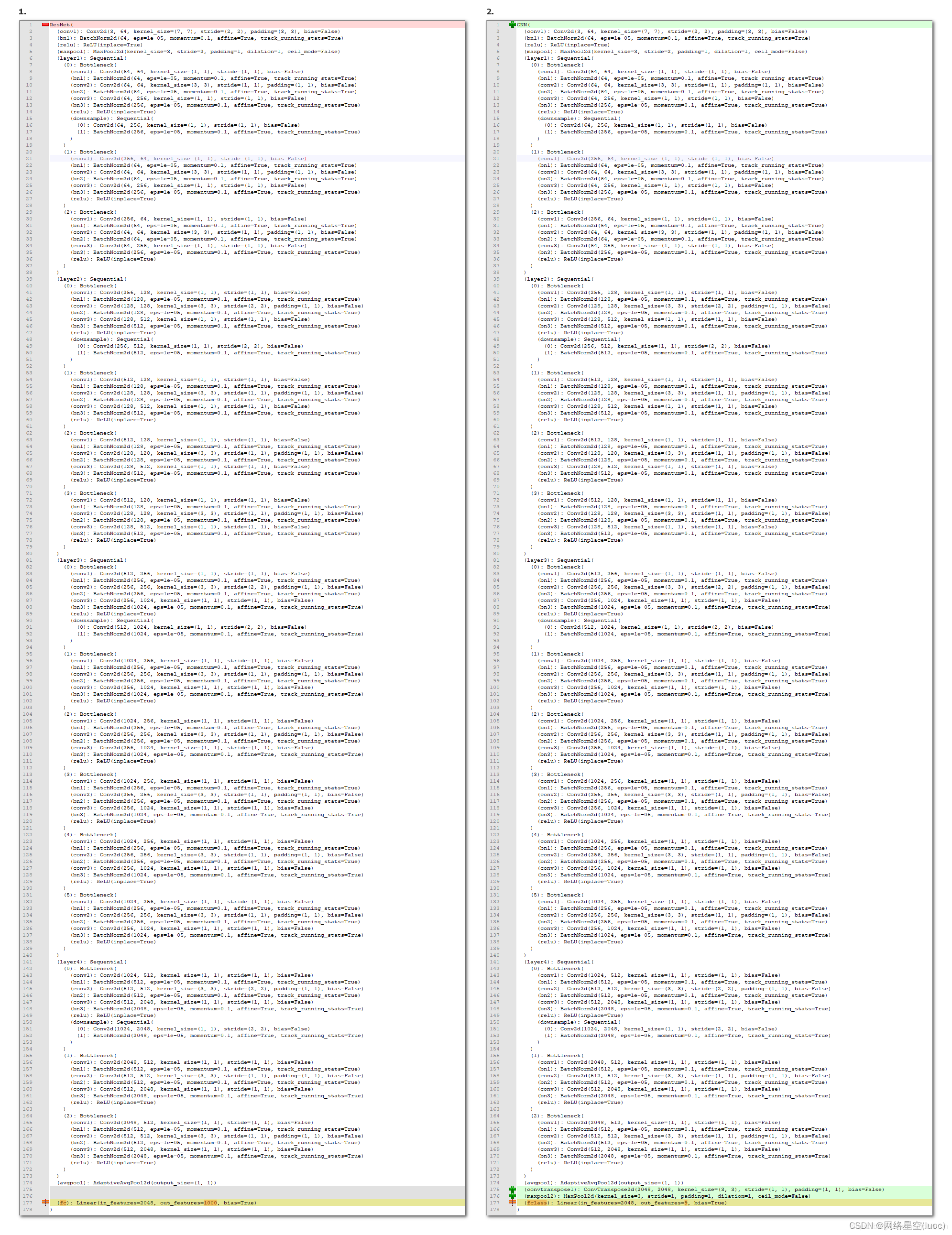
The knowledge points of the article match the official knowledge files , You can further learn relevant knowledge
边栏推荐
- 7 themes and 9 technology masters! Dragon Dragon lecture hall hard core live broadcast preview in July, see you tomorrow
- 【load dataset】
- 查看多台机器所有进程
- Use and install RkNN toolkit Lite2 on itop-3568 development board NPU
- 【Win11 多用户同时登录远程桌面配置方法】
- 1个插件搞定网页中的广告
- [loss functions of L1, L2 and smooth L1]
- [mainstream nivida graphics card deep learning / reinforcement learning /ai computing power summary]
- Install esxi 6.0 interactively
- Open3D 欧式聚类
猜你喜欢
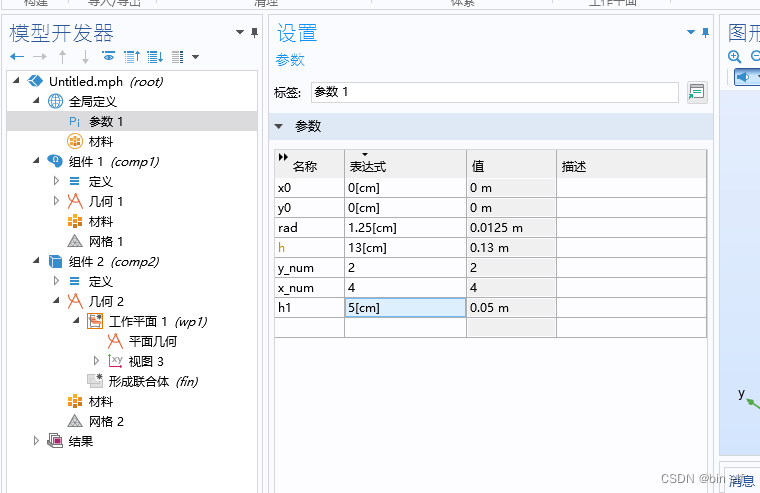
COMSOL -- establishment of geometric model -- establishment of two-dimensional graphics
简单解决redis cluster中从节点读取不了数据(error) MOVED

11.(地图数据篇)OSM数据如何下载使用
调查显示传统数据安全工具在60%情况下无法抵御勒索软件攻击
pytorch-多层感知机MLP
COMSOL -- establishment of 3D graphics
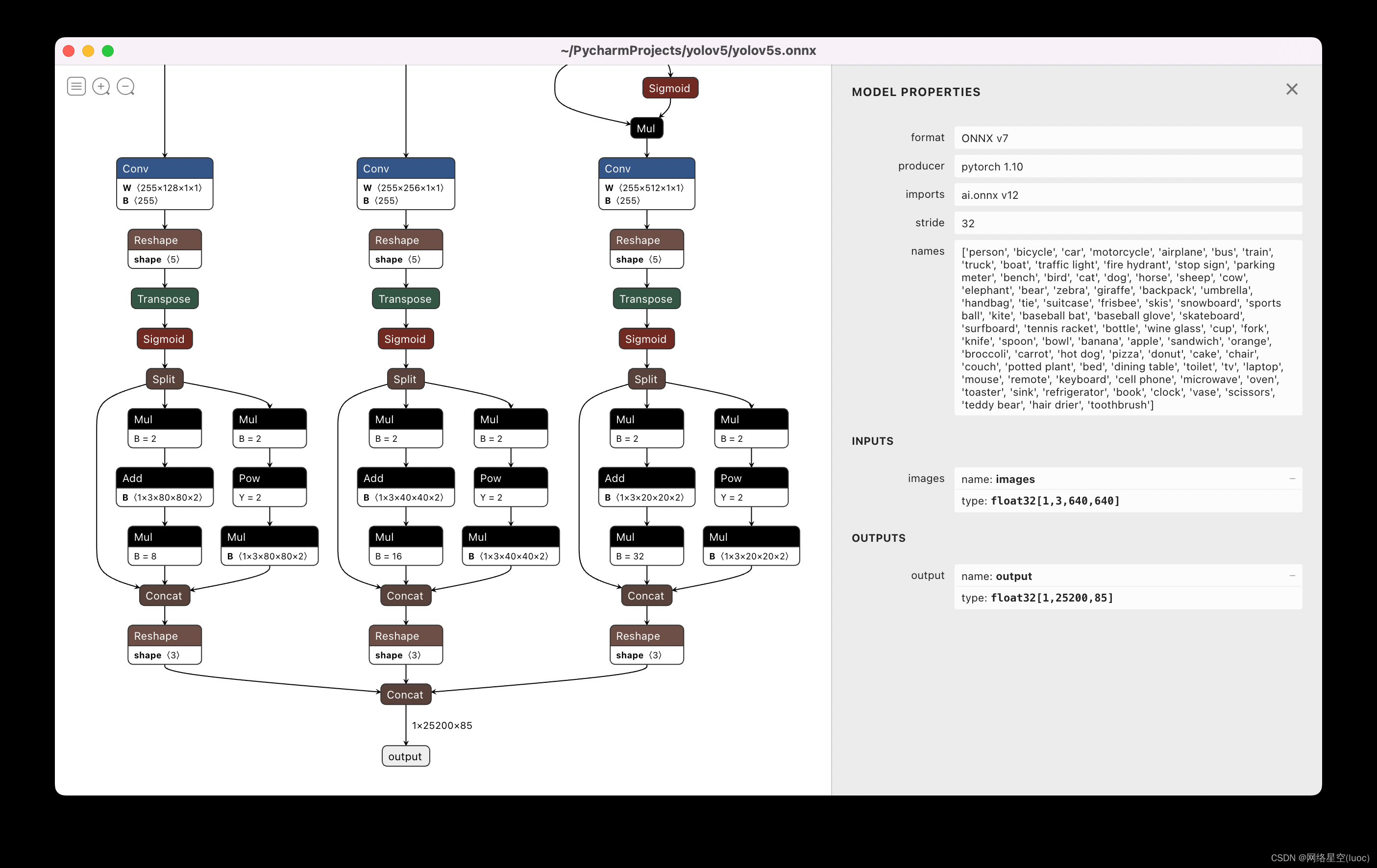
【TFLite, ONNX, CoreML, TensorRT Export】
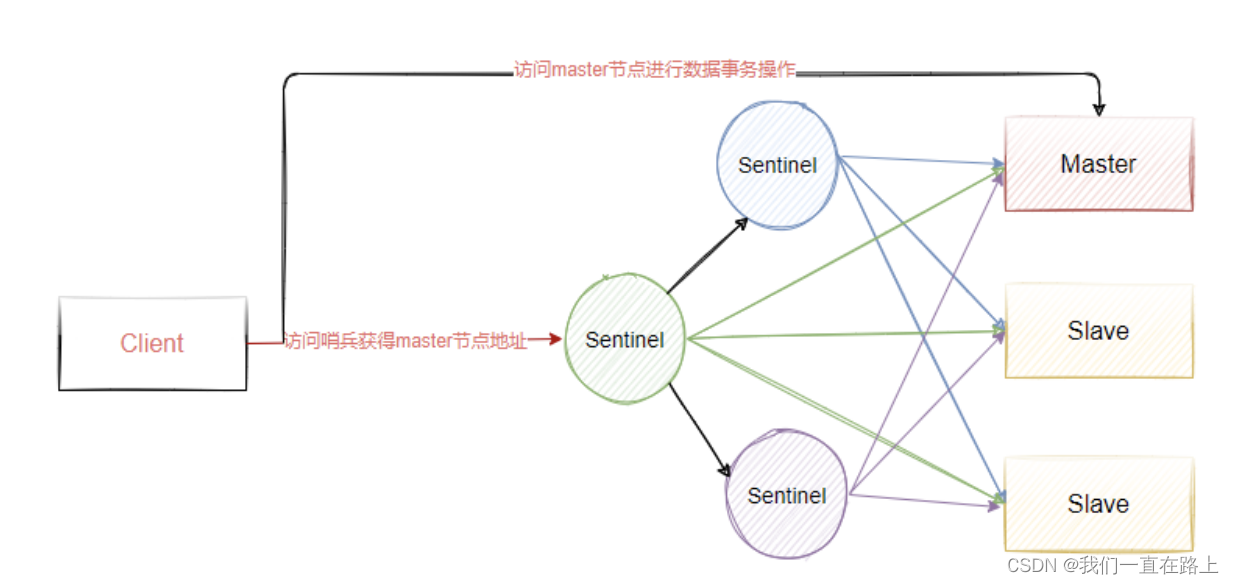
Sentinel sentinel mechanism of master automatic election in redis master-slave
![[cloud native | kubernetes] actual battle of ingress case (13)](/img/1a/9404f6dcedd15827fa45f8f6f4c093.png)
[cloud native | kubernetes] actual battle of ingress case (13)
iTOP-3568开发板NPU使用安装RKNN Toolkit Lite2
随机推荐
程序员内卷和保持行业竞争力
Use and install RkNN toolkit Lite2 on itop-3568 development board NPU
Idea set the number of open file windows
pytorch-多层感知机MLP
1 plug-in to handle advertisements in web pages
[loss functions of L1, L2 and smooth L1]
Solve readobjectstart: expect {or N, but found n, error found in 1 byte of
中非 钻石副石怎么镶嵌,才能既安全又好看?
Install esxi 6.0 interactively
C # implements WinForm DataGridView control to support overlay data binding
Liunx prohibit Ping explain the different usage of traceroute
Yolov 5 Target Detection Neural Network - Loss Function Calculation Principle
一次生产环境redis内存占用居高不下问题排查
1个插件搞定网页中的广告
XML解析
Ncp1342 chip substitute pn8213 65W gallium nitride charger scheme
[leetcode] wild card matching
Empêcher le navigateur de reculer
View all processes of multiple machines
MySQL 巨坑:update 更新慎用影响行数做判断!!!