当前位置:网站首页>Polynomial locus of order 5
Polynomial locus of order 5
2022-07-07 05:41:00 【An audience who doesn't understand music】
Prerequisite
- In order to get a track with continuous speed , Then each track in the track needs to meet the position and speed constraints (4 A boundary condition ), That is, the previous track J i − 1 J_{i-1} Ji−1 The position and speed of the end point should be the same as that of the next track J i J_{i} Ji The position and speed are the same , Therefore, the third-order polynomial is used to represent each trajectory .
- In order to obtain a continuous acceleration trajectory , Then each track in the track needs to meet the position 、 Velocity and acceleration constraints (6 A boundary condition ), That is, the previous track J i − 1 J_{i-1} Ji−1 The end position of 、 The speed and acceleration should be consistent with the later trajectory J i J_{i} Ji The location of 、 The speed and acceleration are the same , Therefore, the fifth order polynomial is used to represent each trajectory .
Text
about One In terms of trajectory , Usually, a continuous trajectory can be segmented into multi segment polynomial trajectory , Here, consider using 5 Polynomial of order . The corresponding time of each track is from 0 0 0 Start to T i T_i Ti end , That is to say, for the i i i Segment trajectory J i J_i Ji for , Its start time is 0 0 0, The end time is T i T_i Ti, The starting position 、 Speed 、 The accelerations are p i p_i pi、 v i v_i vi and a i a_i ai. According to the definition of polynomial trajectory
p = c 0 + c 1 t + c 2 t 2 + c 3 t 3 + c 4 t 4 + c 5 t 5 v = c 1 + 2 c 2 t + 3 c 3 t 2 + 4 c 4 t 3 + 5 c 5 t 4 a = 2 c 2 + 6 c 3 t + 12 c 4 t 2 + 20 c 5 t 3 j e r k = 6 c 3 + 24 c 4 t + 60 c 5 t 2 s n a p = 24 c 4 + 120 c 5 t . ( Male type 1 ) \begin{aligned} p&=c_{0}+c_{1}t+c_{2}t^2+c_{3}t^3+c_{4}t^4+c_{5}t^5 \\ v&=\quad\quad c_{1}+2c_{2}t+3c_{3}t^2+4c_{4}t^3+5c_{5}t^4 \\ a&=\quad\quad\quad\quad2c_{2}+6c_{3}t+12c_{4}t^2+20c_{5}t^3 \\ jerk&=\quad\quad\quad\quad\quad\quad \quad6c_{3}+24c_{4}t+60c_{5}t^2 \\ snap&=\quad\quad\quad\quad\quad\quad \quad\quad \quad\quad 24c_{4}+120c_{5}t. \quad\quad( The formula 1)\\ \end{aligned} pvajerksnap=c0+c1t+c2t2+c3t3+c4t4+c5t5=c1+2c2t+3c3t2+4c4t3+5c5t4=2c2+6c3t+12c4t2+20c5t3=6c3+24c4t+60c5t2=24c4+120c5t.( Male type 1)
By the end of 1 1 1 Take segment trajectory as an example , take t = 0 t=0 t=0 Into the ( The formula 1) You can get the beginning of the first track :
p 1 ( 0 ) = c 10 , v 1 ( 0 ) = c 11 , a 1 ( 0 ) = 2 c 12 . \begin{aligned} p_1(0)&=c_{10}, \\ v_1(0)&=c_{11},\\ a_1(0)&=2c_{12}. \end{aligned} p1(0)v1(0)a1(0)=c10,=c11,=2c12.
take t = T 1 t=T_1 t=T1 Into the ( The formula 1) You can get the initial end of the first track :
p 1 ( T 1 ) = c 10 + c 11 ( T 1 − 0 ) + c 12 ( T 1 − 0 ) 2 + c 13 ( T 1 − 0 ) 3 + c 14 ( T 1 − 0 ) 4 + c 15 ( T 1 − 0 ) 5 = c 10 + c 11 T 1 + c 12 T 1 2 + c 13 T 1 3 + c 14 T 1 4 + c 15 T 1 5 , v 1 ( T 1 ) = c 11 + 2 c 12 ( T 1 − 0 ) + 3 c 13 ( T 1 − 0 ) 2 + 4 c 14 ( T 1 − 0 ) 3 + 5 c 15 ( T 1 − 0 ) 4 = c 11 + 2 c 12 ( T 1 ) + 3 c 13 ( T 1 ) 2 + 4 c 14 ( T 1 ) 3 + 5 c 15 ( T 1 ) 4 , a 1 ( T 1 ) = 2 c 12 + 6 c 13 ( T 1 − 0 ) + 12 c 14 ( T 1 − 0 ) 2 + 20 c 15 ( T 1 − 0 ) 3 = 2 c 12 + 6 c 13 ( T 1 ) + 12 c 14 ( T 1 ) 2 + 20 c 15 ( T 1 ) 3 . \begin{aligned} p_1(T_1)&=c_{10}+c_{11}(T_1-0)+c_{12}(T_1-0)^2+c_{13}(T_1-0)^3+c_{14}(T_1-0)^4+c_{15}(T_1-0)^5 \\ & = c_{10}+c_{11}T_1+c_{12}T_1^2+c_{13}T_1^3+c_{14}T_1^4+c_{15}T_1^5, \\ v_1(T_1)&=c_{11}+2c_{12}(T_1-0)+3c_{13}(T_1-0)^2+4c_{14}(T_1-0)^3+5c_{15}(T_1-0)^4 \\ & = c_{11}+2c_{12}(T_1)+3c_{13}(T_1)^2+4c_{14}(T_1)^3+5c_{15}(T_1)^4, \\ a_1(T_1)&=2c_{12}+6c_{13}(T_1-0)+12c_{14}(T_1-0)^2+20c_{15}(T_1-0)^3\\ & = 2c_{12}+6c_{13}(T_1)+12c_{14}(T_1)^2+20c_{15}(T_1)^3. \end{aligned} p1(T1)v1(T1)a1(T1)=c10+c11(T1−0)+c12(T1−0)2+c13(T1−0)3+c14(T1−0)4+c15(T1−0)5=c10+c11T1+c12T12+c13T13+c14T14+c15T15,=c11+2c12(T1−0)+3c13(T1−0)2+4c14(T1−0)3+5c15(T1−0)4=c11+2c12(T1)+3c13(T1)2+4c14(T1)3+5c15(T1)4,=2c12+6c13(T1−0)+12c14(T1−0)2+20c15(T1−0)3=2c12+6c13(T1)+12c14(T1)2+20c15(T1)3.
Similarly, when the second track starts :
p 2 ( 0 ) = c 20 , v 2 ( 0 ) = c 21 , a 2 ( 0 ) = 2 c 22 . \begin{aligned} p_2(0)&=c_{20}, \\ v_2(0)&=c_{21},\\ a_2(0)&=2c_{22}. \end{aligned} p2(0)v2(0)a2(0)=c20,=c21,=2c22.
Because a trajectory is composed of multi segment polynomial trajectory , So it needs to meet :
{ c 10 = p 1 ( 0 ) : rise beginning position Set up edge world strip Pieces of c 11 = v 1 ( 0 ) : rise beginning speed degree edge world strip Pieces of 2 c 12 = a 1 ( 0 ) : rise beginning Add speed degree edge world strip Pieces of front One paragraph rail trace end stop j e r k And after One paragraph rail trace rise beginning s n a p phase Same as , nothing j e r k Big Small about beam , namely j e r k 1 ( T 1 ) − j e r k 2 ( 0 ) = 0 6 c 13 + 24 c 14 T 1 + 60 c 15 T 1 2 − 6 c 23 = 0 front One paragraph rail trace end stop s n a p And after One paragraph rail trace rise beginning s n a p phase Same as , nothing s n a p Big Small about beam , namely s n a p 1 ( T 1 ) − s n a p 2 ( 0 ) = 0 24 c 14 + 120 T 1 − 24 c 24 = 0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning position Set up phase Same as , namely p 1 ( T 1 ) = p 2 ( 0 ) : c 10 + c 11 T 1 + c 12 T 1 2 + c 13 T 1 3 + c 14 T 1 4 + c 15 T 1 5 = p 2 ( 0 ) c 10 + c 11 T 1 + c 12 T 1 2 + c 13 T 1 3 + c 14 T 1 4 + c 15 T 1 5 − c 20 = 0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning speed degree phase Same as , namely v 1 ( T 1 ) − v 2 ( 0 ) = 0 c 11 + 2 c 12 T 1 + 3 c 13 T 1 2 + 4 c 14 T 1 3 + 5 c 15 T 1 4 − c 21 = 0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning Add speed degree phase Same as , namely a 1 ( T 1 ) − a 2 ( 0 ) = 0 2 c 12 + 6 c 13 T 1 + 12 c 14 T 1 2 + 20 c 15 T 1 3 − 2 c 22 = 0 \left\{\begin{aligned} &c_{10}=p_1(0): Starting position boundary condition \\ &c_{11}=v_1(0): Initial velocity boundary condition \\ &2c_{12}=a_1(0): Initial acceleration boundary condition \\ & The previous track ends jerk Start with the next track snap identical , nothing jerk Size constraints , namely jerk_1(T_1)-jerk_2(0)=0\\ &6c_{13}+24c_{14}T_1+60c_{15}T_1^2-6c_{23}=0\\ & The previous track ends snap Start with the next track snap identical , nothing snap Size constraints , namely snap_1(T_1)-snap_2(0)=0\\ &24c_{14}+120T_1-24c_{24}=0\\ & The ending position of the previous track is the same as the starting position of the next track , namely p_1(T_1)=p_2(0):\\ &c_{10}+c_{11}T_1+c_{12}T_1^2+c_{13}T_1^3+c_{14}T_1^4+c_{15}T_1^5=p_2(0)\\ &c_{10}+c_{11}T_1+c_{12}T_1^2+c_{13}T_1^3+c_{14}T_1^4+c_{15}T_1^5-c_{20}=0\\ & The ending position of the previous track is the same as the starting speed of the next track , namely v_1(T_1)-v_2(0)=0\\ &c_{11}+2c_{12}T_1+3c_{13}T_1^2+4c_{14}T_1^3+5c_{15}T_1^4-c_{21}=0\\ & The ending position of the previous track is the same as the starting acceleration of the next track , namely a_1(T_1)-a_2(0)=0\\ &2c_{12}+6c_{13}T_1+12c_{14}T_1^2+20c_{15}T_1^3-2c_{22}=0\\ \end{aligned}\right. ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧c10=p1(0): rise beginning position Set up edge world strip Pieces of c11=v1(0): rise beginning speed degree edge world strip Pieces of 2c12=a1(0): rise beginning Add speed degree edge world strip Pieces of front One paragraph rail trace end stop jerk And after One paragraph rail trace rise beginning snap phase Same as , nothing jerk Big Small about beam , namely jerk1(T1)−jerk2(0)=06c13+24c14T1+60c15T12−6c23=0 front One paragraph rail trace end stop snap And after One paragraph rail trace rise beginning snap phase Same as , nothing snap Big Small about beam , namely snap1(T1)−snap2(0)=024c14+120T1−24c24=0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning position Set up phase Same as , namely p1(T1)=p2(0):c10+c11T1+c12T12+c13T13+c14T14+c15T15=p2(0)c10+c11T1+c12T12+c13T13+c14T14+c15T15−c20=0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning speed degree phase Same as , namely v1(T1)−v2(0)=0c11+2c12T1+3c13T12+4c14T13+5c15T14−c21=0 front One paragraph rail trace end stop position Set up And after One paragraph rail trace rise beginning Add speed degree phase Same as , namely a1(T1)−a2(0)=02c12+6c13T1+12c14T12+20c15T13−2c22=0
Convert the above constraints into a matrix Ax=b form , Available :
x = [ c 10 c 11 c 12 c 13 c 14 c 15 c 20 c 21 c 22 c 23 c 24 c 25 ] x=\begin{bmatrix} c_{10}\\ c_{11}\\ c_{12} \\ c_{13} \\ c_{14} \\ c_{15} \\ c_{20} \\ c_{21} \\ c_{22} \\ c_{23} \\ c_{24} \\ c_{25} \\ \end{bmatrix} x=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡c10c11c12c13c14c15c20c21c22c23c24c25⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
b = [ p 1 ( 0 ) v 1 ( 0 ) a 1 ( 0 ) 0 0 p 2 ( 0 ) 0 0 0 ] b=\begin{bmatrix} {p_1(0)}\\ {v_1(0)}\\ {a_1(0)}\\ 0\\ 0\\ p_2(0)\\ 0\\ 0\\ 0\\ \\ \end{bmatrix} b=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡p1(0)v1(0)a1(0)00p2(0)000⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
structure A The matrix is as follows :
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 1 1 | |||||||||||
| 1 | 1 1 1 | |||||||||||
| 2 | 2 2 2 | |||||||||||
| 3 | 6 6 6 | 24 T 1 24T_1 24T1 | 60 T 1 2 60T_1^2 60T12 | − 6 -6 −6 | ||||||||
| 4 | 24 24 24 | 120 T 1 120T_1 120T1 | − 24 -24 −24 | |||||||||
| 5 | 1 1 1 | T 1 T_1 T1 | T 1 2 T_1^2 T12 | T 1 3 T_1^3 T13 | T 1 4 T_1^4 T14 | T 1 5 T_1^5 T15 | ||||||
| 6 | 1 1 1 | T 1 T_1 T1 | T 1 2 T_1^2 T12 | T 1 3 T_1^3 T13 | T 1 4 T_1^4 T14 | T 1 5 T_1^5 T15 | − 1 -1 −1 | |||||
| 7 | 1 1 1 | 2 T 1 2T_1 2T1 | 3 T 1 2 3T_1^2 3T12 | 4 T 1 3 4T_1^3 4T13 | 5 T 1 4 5T_1^4 5T14 | − 1 -1 −1 | ||||||
| 8 | 2 2 2 | 6 T 6T 6T | 12 T 1 2 12T_1^2 12T12 | 20 T 1 3 20T_1^3 20T13 | − 2 -2 −2 | |||||||
| 9 | … | |||||||||||
| 10 | 1 1 1 | T 2 T_2 T2 | T 2 2 T_2^2 T22 | T 2 3 T_2^3 T23 | T 2 4 T_2^4 T24 | T 2 5 T_2^5 T25 | ||||||
| 11 | 1 1 1 | 2 T 2 2T_2 2T2 | 3 T 2 2 3T_2^2 3T22 | 4 T 2 3 4T_2^3 4T23 | 5 T 2 4 5T_2^4 5T24 | |||||||
| 12 | 2 2 2 | 6 T 2 6T_2 6T2 | 12 T 2 2 12T_2^2 12T22 | 20 T 2 3 20T_2^3 20T23 |
notes : Red is OK / Column label .
inline void generate(const Eigen::MatrixXd &inPs,
const Eigen::VectorXd &ts)
{
T1 = ts;
T2 = T1.cwiseProduct(T1);
T3 = T2.cwiseProduct(T1);
T4 = T2.cwiseProduct(T2);
T5 = T4.cwiseProduct(T1);
A.reset();
b.setZero();
A(0, 0) = 1.0;
A(1, 1) = 1.0;
A(2, 2) = 2.0;
b.row(0) = headPVA.col(0).transpose();
b.row(1) = headPVA.col(1).transpose();
b.row(2) = headPVA.col(2).transpose();
for (int i = 0; i < N - 1; i++)
{
A(6 * i + 3, 6 * i + 3) = 6.0;
A(6 * i + 3, 6 * i + 4) = 24.0 * T1(i);
A(6 * i + 3, 6 * i + 5) = 60.0 * T2(i);
A(6 * i + 3, 6 * i + 9) = -6.0;
A(6 * i + 4, 6 * i + 4) = 24.0;
A(6 * i + 4, 6 * i + 5) = 120.0 * T1(i);
A(6 * i + 4, 6 * i + 10) = -24.0;
A(6 * i + 5, 6 * i) = 1.0;
A(6 * i + 5, 6 * i + 1) = T1(i);
A(6 * i + 5, 6 * i + 2) = T2(i);
A(6 * i + 5, 6 * i + 3) = T3(i);
A(6 * i + 5, 6 * i + 4) = T4(i);
A(6 * i + 5, 6 * i + 5) = T5(i);
A(6 * i + 6, 6 * i) = 1.0;
A(6 * i + 6, 6 * i + 1) = T1(i);
A(6 * i + 6, 6 * i + 2) = T2(i);
A(6 * i + 6, 6 * i + 3) = T3(i);
A(6 * i + 6, 6 * i + 4) = T4(i);
A(6 * i + 6, 6 * i + 5) = T5(i);
A(6 * i + 6, 6 * i + 6) = -1.0;
A(6 * i + 7, 6 * i + 1) = 1.0;
A(6 * i + 7, 6 * i + 2) = 2 * T1(i);
A(6 * i + 7, 6 * i + 3) = 3 * T2(i);
A(6 * i + 7, 6 * i + 4) = 4 * T3(i);
A(6 * i + 7, 6 * i + 5) = 5 * T4(i);
A(6 * i + 7, 6 * i + 7) = -1.0;
A(6 * i + 8, 6 * i + 2) = 2.0;
A(6 * i + 8, 6 * i + 3) = 6 * T1(i);
A(6 * i + 8, 6 * i + 4) = 12 * T2(i);
A(6 * i + 8, 6 * i + 5) = 20 * T3(i);
A(6 * i + 8, 6 * i + 8) = -2.0;
b.row(6 * i + 5) = inPs.col(i).transpose();
}
A(6 * N - 3, 6 * N - 6) = 1.0;
A(6 * N - 3, 6 * N - 5) = T1(N - 1);
A(6 * N - 3, 6 * N - 4) = T2(N - 1);
A(6 * N - 3, 6 * N - 3) = T3(N - 1);
A(6 * N - 3, 6 * N - 2) = T4(N - 1);
A(6 * N - 3, 6 * N - 1) = T5(N - 1);
A(6 * N - 2, 6 * N - 5) = 1.0;
A(6 * N - 2, 6 * N - 4) = 2 * T1(N - 1);
A(6 * N - 2, 6 * N - 3) = 3 * T2(N - 1);
A(6 * N - 2, 6 * N - 2) = 4 * T3(N - 1);
A(6 * N - 2, 6 * N - 1) = 5 * T4(N - 1);
A(6 * N - 1, 6 * N - 4) = 2;
A(6 * N - 1, 6 * N - 3) = 6 * T1(N - 1);
A(6 * N - 1, 6 * N - 2) = 12 * T2(N - 1);
A(6 * N - 1, 6 * N - 1) = 20 * T3(N - 1);
b.row(6 * N - 3) = tailPVA.col(0).transpose();
b.row(6 * N - 2) = tailPVA.col(1).transpose();
b.row(6 * N - 1) = tailPVA.col(2).transpose();
A.factorizeLU();
A.solve(b);
return;
边栏推荐
- How digitalization affects workflow automation
- JVM (19) -- bytecode and class loading (4) -- talk about class loader again
- [JS component] date display.
- Most commonly used high number formula
- Taobao commodity details page API interface, Taobao commodity list API interface, Taobao commodity sales API interface, Taobao app details API interface, Taobao details API interface
- English grammar_ Noun possessive
- 拼多多商品详情接口、拼多多商品基本信息、拼多多商品属性接口
- “多模态”概念
- LabVIEW is opening a new reference, indicating that the memory is full
- C#可空类型
猜你喜欢
Five core elements of architecture design
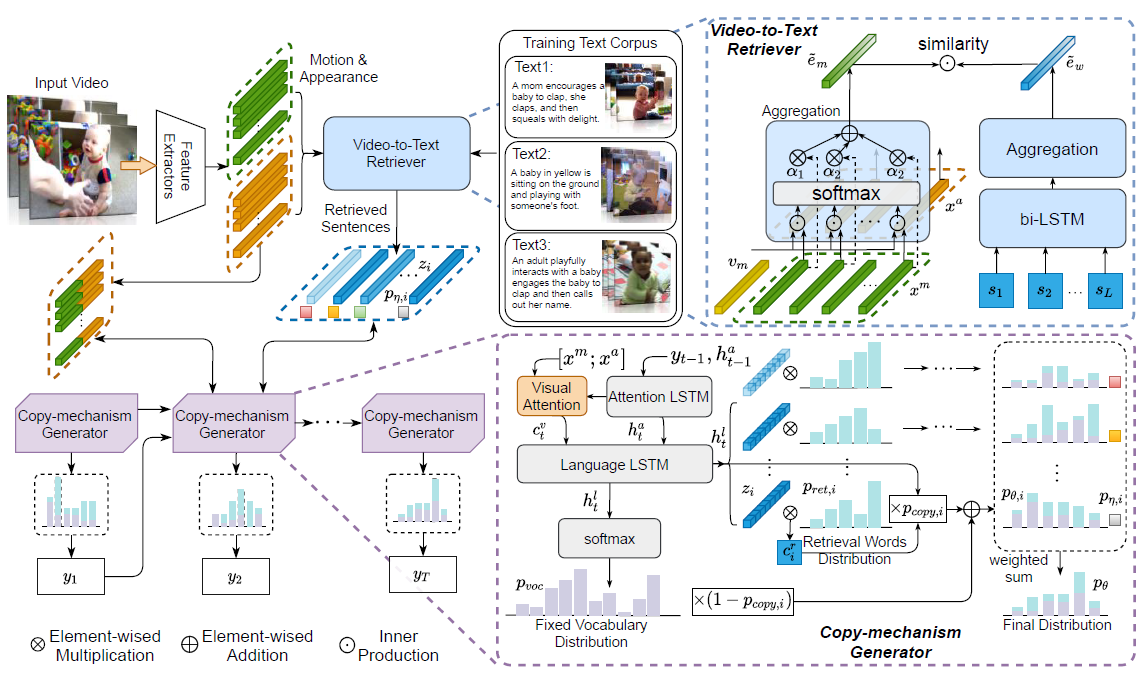
论文阅读【Open-book Video Captioning with Retrieve-Copy-Generate Network】

不同网段之间实现GDB远程调试功能
![[论文阅读] Semi-supervised Left Atrium Segmentation with Mutual Consistency Training](/img/d6/e6db0d76e81e49a83a30f8c1832f09.png)
[论文阅读] Semi-supervised Left Atrium Segmentation with Mutual Consistency Training
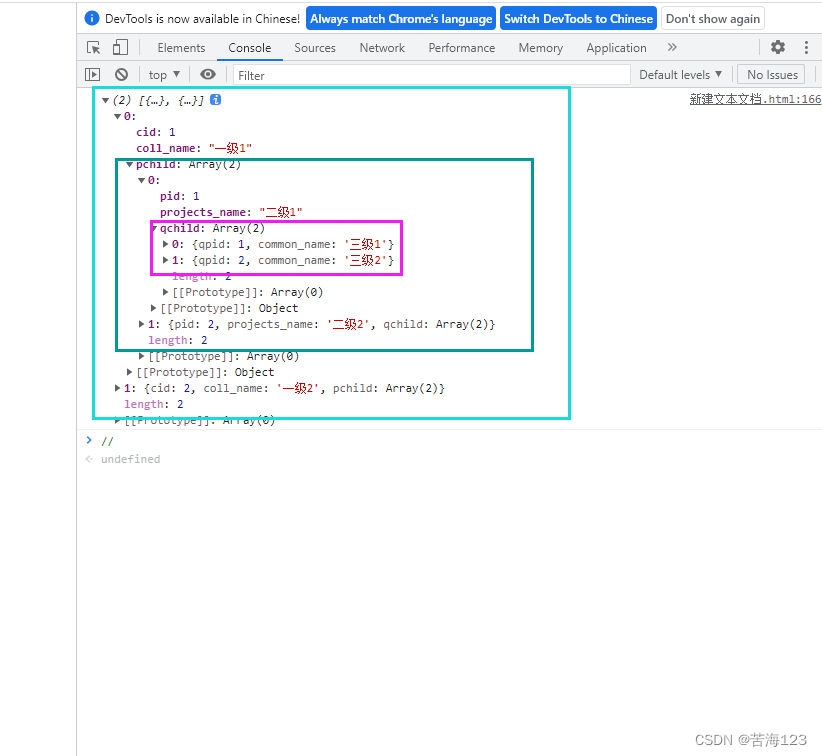
三级菜单数据实现,实现嵌套三级菜单数据
基于NCF的多模块协同实例
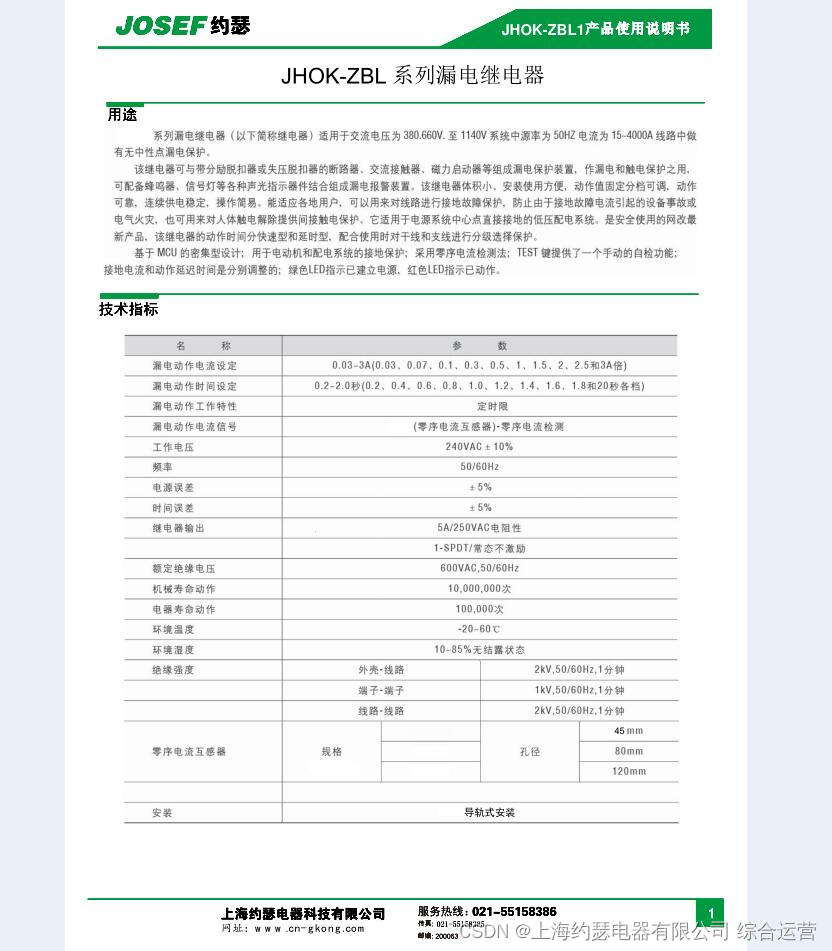
Jhok-zbl1 leakage relay
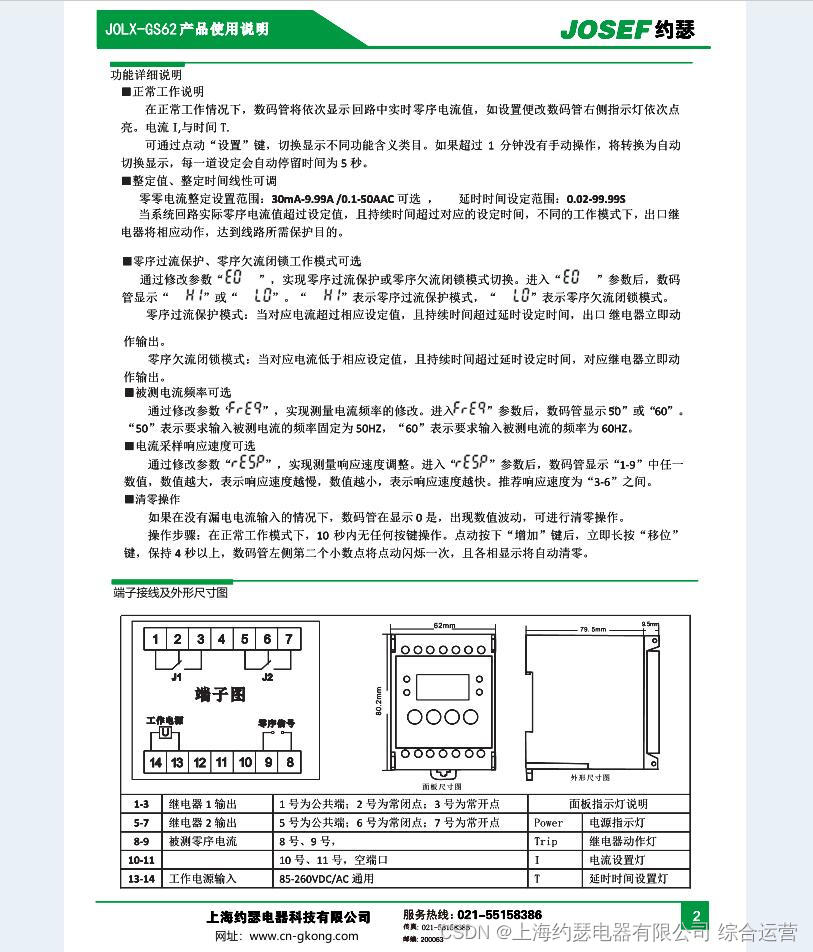
Zero sequence aperture of leakage relay jolx-gs62 Φ one hundred
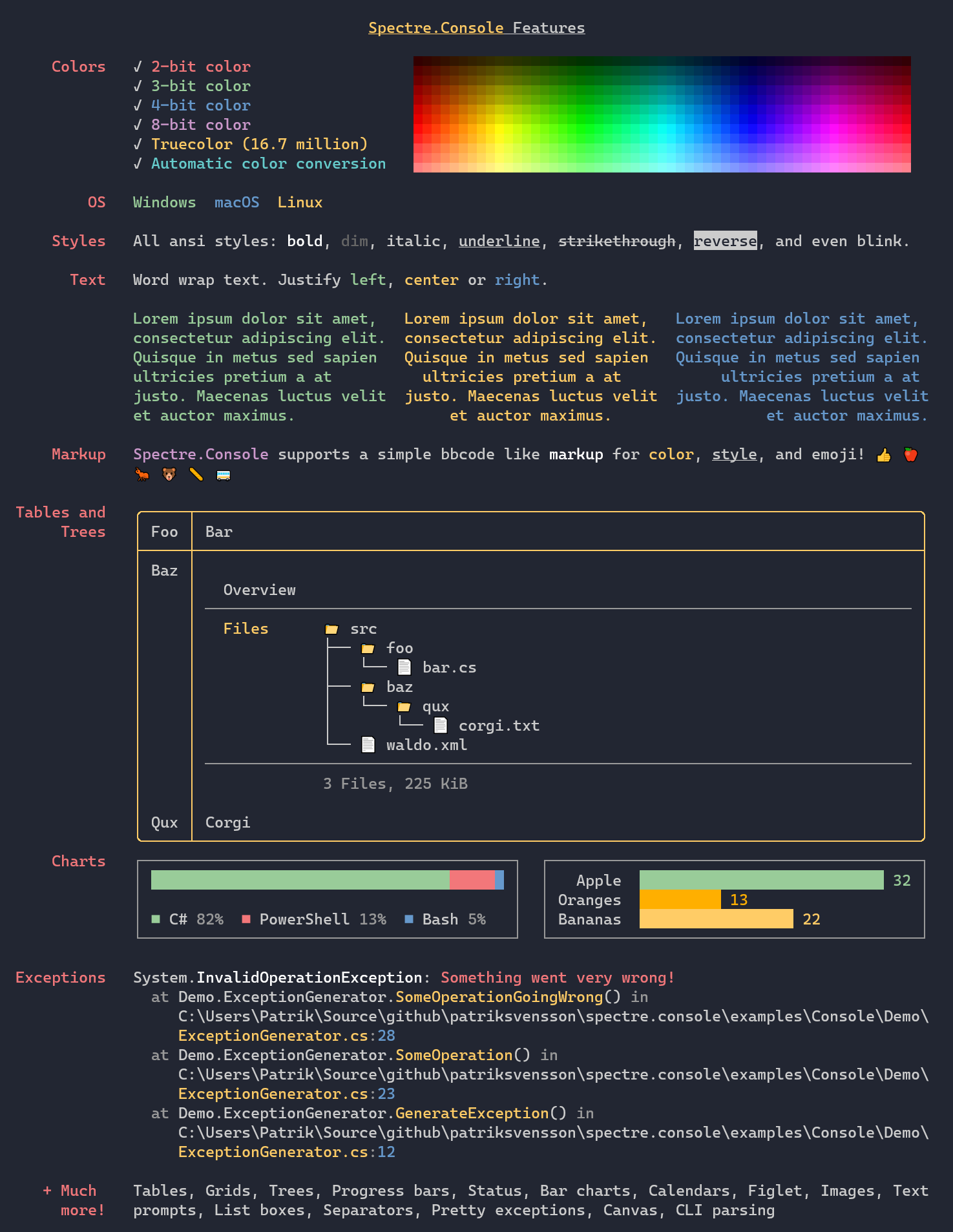
A cool "ghost" console tool
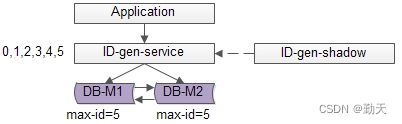
分布式全局ID生成方案
随机推荐
The navigation bar changes colors according to the route
分布式全局ID生成方案
AI人脸编辑让Lena微笑
删除文件时提示‘源文件名长度大于系统支持的长度’无法删除解决办法
不同网段之间实现GDB远程调试功能
[论文阅读] A Multi-branch Hybrid Transformer Network for Corneal Endothelial Cell Segmentation
"Multimodal" concept
Différenciation et introduction des services groupés, distribués et microservices
Under the trend of Micah, orebo and apple homekit, how does zhiting stand out?
Flink SQL realizes reading and writing redis and dynamically generates hset key
Intelligent annotation scheme of entity recognition based on hugging Face Pre training model: generate doccano request JSON format
How Alibaba cloud's DPCA architecture works | popular science diagram
Web architecture design process
4. 对象映射 - Mapping.Mapster
SQL query: subtract the previous row from the next row and make corresponding calculations
Batch size setting skills
Mybaits之多表查询(联合查询、嵌套查询)
Record a pressure measurement experience summary
When deleting a file, the prompt "the length of the source file name is greater than the length supported by the system" cannot be deleted. Solution
1. AVL tree: left-right rotation -bite