当前位置:网站首页>How to model and simulate the target robot [mathematical / control significance]
How to model and simulate the target robot [mathematical / control significance]
2022-07-07 07:02:00 【Life is like Zhaoxu】
Preface

In the robot learning in the previous section , We have learned about the current hot robot research direction , From vision 、 AI to multi machine communication 、 Man machine cooperation , The research of robots has broad prospects , And want to learn robots well , The first step is to build a model , The title of this section is The meaning of Mathematics Modeling and Simulation on , In fact, it refers to the construction of kinematic model and dynamic model of robot , And use Matlab The toolbox of completes the verification simulation of the model . The next section will be robot modeling in the mechanical sense , It refers to how to manually generate and establish a graphical robot 3D Model , It involves many simulation software , In the next blog section , Will be attached Plane 2R Single leg models of robots and quadrupeds Example analysis of .
One 、 Model concept
1. The significance of establishing the model
namely , What is the purpose of establishing kinematic and dynamic models of robots ?
- Kinematic model : Describe the relationship between the target motion of the control object and the motion of each driving unit , Call repeatedly in the control process
Simple speak : As we mentioned Coordinate transformation , The kinematic model gives us the relationship between the end effector or other coordinate systems relative to the torso coordinate system of the robot , It is convenient for the forward and reverse settlement of sports , You can plan the end trajectory directly , Get the moving track of each position through the kinematic model ;
- The kinetic model : Describe the relationship between the motion of the controlled object and the input force or torque of the driving unit . Determine the upper limit of the motion index and guide the device selection
Simple speak : With the movement of each part of the robot , Want to control the robot , It is necessary to complete from the motion displacement angle to the mechanical angle through the dynamic model , namely Conversion of joint torque , In order to control ;
2. Method of establishing model
namely , What method is used to build the robot model ?
1) Kinematic model :
Historical method evolution
- Rigid body kinematics method : For rigid body systems , That is to ignore the deformation of the object under the action of force , Simplification problem , Use d'Alembert - Lagrange principle for mathematical modeling , The calculation is relatively complex ;
- Multibody system : More for analyzing complex mechanical systems , Easy to realize automatic programming of computer , More standardized 、 Cheng Shihua , It plays an important role in multi-body complex systems
- Mechanism modeling method : Starting from mechanism , Decompose the robot layer by layer , Split complex rod groups , Use graph theory and other principles to integrate subsystems 、 The relationship between institutions is transformed into a matrix exercise , Determine the freedom and redundancy of the body , One of the most famous is the homogeneous coordinate matrix method .
The mainstream approach :DH Model method
Our commonly used kinematic modeling methods are DH Model method , Quaternion method , Exponential product method, etc , Here we focus on DH Model method

Concept : Using the homogeneous transformation matrix to describe the spatial relationship between adjacent connecting rods , Through layer upon layer transformation , Realize the equivalent homogeneous transformation matrix from the base coordinate system to the end actuator coordinate system , Kinematic equation . The robot manipulator is regarded as a series of connecting rods connected in series by moving and rotating joints , Study the movement displacement between connecting rods 、 Speed 、 Acceleration relation .
characteristic : The concept is clearer , After specifying the coordinate system of each connecting rod 、 After determining the connecting rod parameters, it is simpler 、 Intuitive model derivation process , And easy in matlab In the simulation ; Although the exponential product rule does not need to specify the coordinate system of each connecting rod , Just specify the joint vectors , But it's more computational ; For quaternions , Is not so intuitive , Understanding is relatively difficult .
2) The kinetic model :
Our commonly used kinematic modeling methods are The Lagrangian method 、 Newton - Euler method 、 Robertson - Wittenberg method 、 Kane method, etc , Here we focus on the first two methods
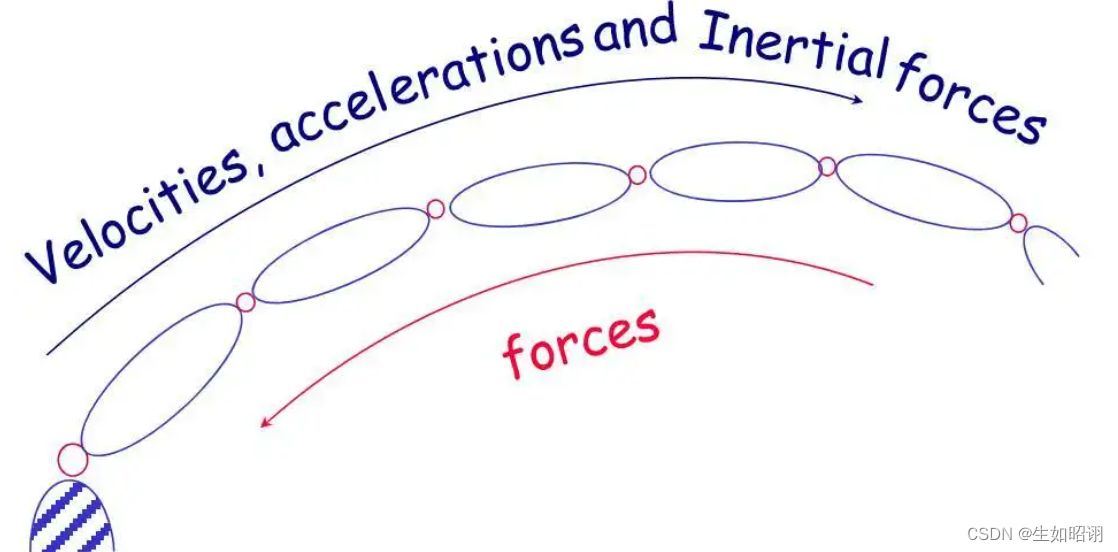
- Newton Euler method :
The corresponding equation is established through the concept of D'Alembert principle and moving coordinate system , The motion of rigid body is mainly divided into translation and rotation , Newton's equation is used for the translation of the center of mass and even the whole rigid body , Apply the theorem of momentum , Get the equation of translational motion of the center of mass ; Use Euler's equation for rotation , Apply the theorem of moment of momentum to determine the main moment . Strictly abide by d'Alembert theorem , For the motion of each member, two parts of external drive and inertia force are considered , The algebraic sum of the two is zero as the basic condition , Achieve accurate calculation . This method is very fast , It can effectively filter redundant information , Is one of the more commonly used methods .
- Lagrangian dynamic method :
A method based on energy balance , When dealing with simple systems, it is better than Newton - Euler's method will be much more complicated , But as the complexity of the system increases , It will be relatively simpler . It mainly sets the generalized coordinates , Describe the force on the robot , There is no need to solve complex internal forces , The equation is established by the differential result of energy with respect to time and corresponding variables , More intuitive and clear .
notes : Different from kinematic model , Establishing dynamic model is only a means of robot control , The control method based on dynamic model has achieved very satisfactory results in many robots in recent years , Especially for serial manipulator , It can achieve good control effect , But for some special robots, they are actually Limited
Two 、 Modeling method analysis
1. DH Model method
1) The basic idea
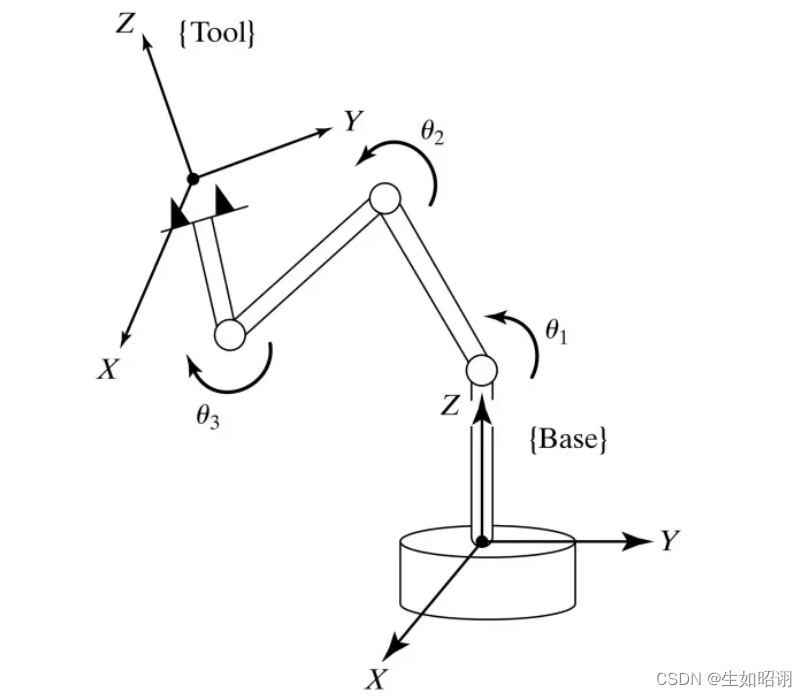
- The basic principle : Think of the manipulator as a rotating joint and a moving joint , Each joint corresponds to the degree of freedom . The leg structure of quadruped robot can be expressed by connecting rod and rotating joint . connecting rod 0 As a base stationary , The length is 0, It is not included in the robot connecting rod , End effector and connecting rod n Solid connection , Form a single chain open motion structure .
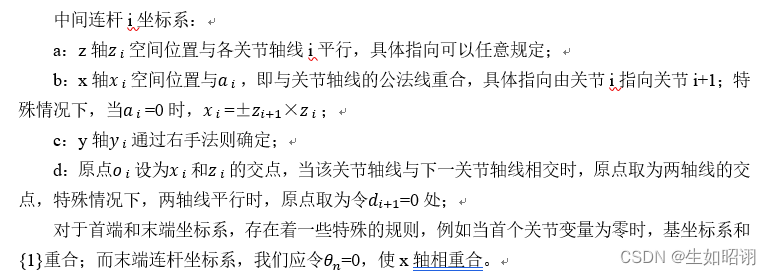
First step , Establish the coordinate system of each joint
- Each connecting rod is fixed to the coordinate system , The base coordinate system is fixed with the base , And connecting rod i The fixed coordinate system is called coordinate system {i}, The specific establishment method of each coordinate system is as follows :
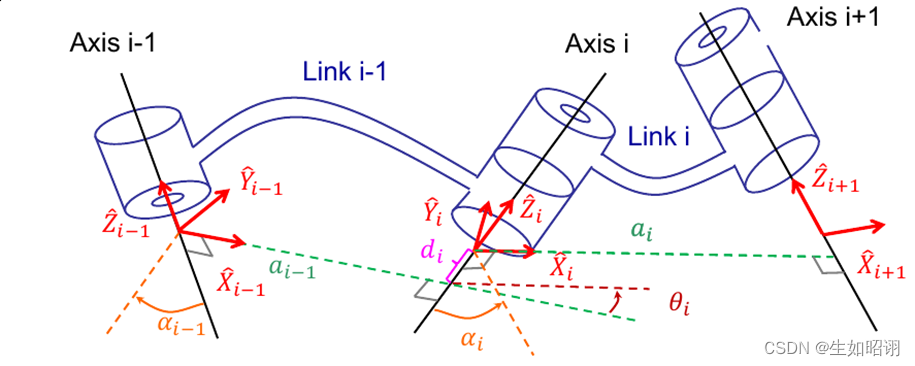
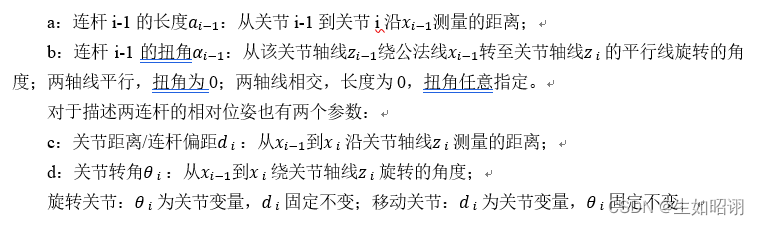
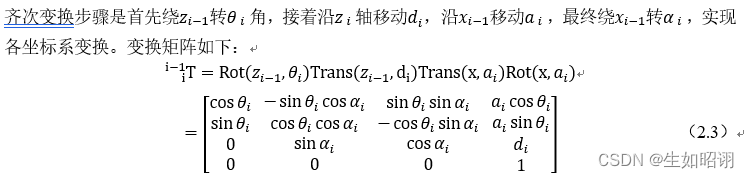
- Specific definition of connecting rod parameters , As shown in the figure , connecting rod i-1 The length of the common normal line of the anterior and posterior joint axis a(i-1) And the included angle between the two axes α(i-1) Regulations , The parameters of a single connecting rod are defined as follows :
The second step , Connecting rod transformation and kinematic equation
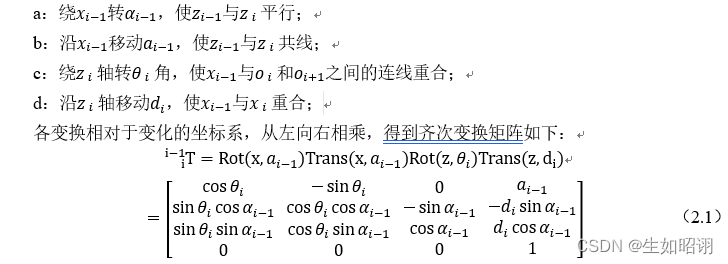
- The connection between connecting rods consists of the above four parameters , Therefore, the transformation between two coordinate systems is a function of four parameters , Transformation matrix T It can be regarded as the multiplication of four basic transformation matrices :
- Each connecting rod matrix is multiplied sequentially to obtain the final connecting rod coordinate system {n} Transformation matrix relative to the base coordinate system , Bring in parameters , You can get the kinematic equation , Establish the relationship between the joint variables and the end pose :

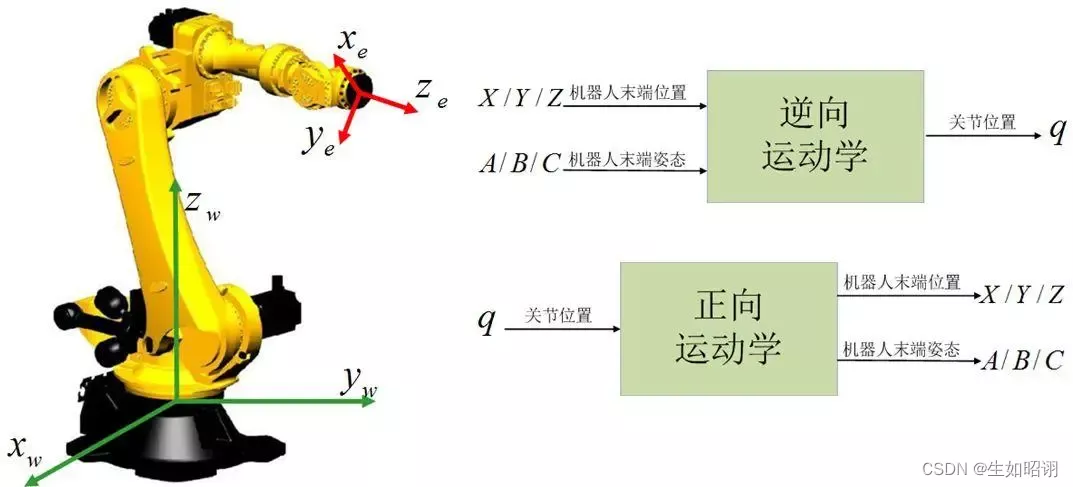
2) Forward and inverse problems
- Positive problem : Given the value of robot joint variables, the position and posture of the end effector are determined
- Inverse problem : According to the given position and posture of the end effector, the value of the robot joint variable is determined
For the positive question , The method of establishing kinematic equations is to multiply the homogeneous transformation matrix to obtain , The solution of the inverse problem is relatively complex :
- characteristic : The positive kinematics solution has a unique definite solution , That is, given the variables of each joint, the unique position and posture of the end effector can be obtained , The inverse kinematics solution often has Multiple solutions , It doesn't even exist . The forms of inverse kinematics solutions include Analytical solutions and numerical solutions , Among them, the nonlinear transcendental equation can only be solved numerically , The solution of analytic solution includes geometric method and algebraic method , In the most ideal case, a closed solution can be obtained , The calculation efficiency of closed solution is high 、 Fast , Easy to achieve fast control ;
- Method :
- Geometry : Through trigonometric functions and related theorems , Through geometric transformation, the results are obtained from the mathematical point of view according to the existence conditions of the solution and the actual requirements , More than two connecting rods are relatively difficult to handle .
- Algebra : Inverse transformation method , The main content is to use the unknown inverse transformation to multiply the kinematic equation one by one , In order to realize the separation of joint variables and solve the corresponding results .
3) standard DH Model
Be careful : In the above matrix description , The improvements we adopted DH Model , namely Modified DH Model method
- standard DH Model : The overall steps are the same , Mainly The fixed connection correspondence between the coordinate system and the connecting rod is different , And the transformation steps of homogeneous transformation are different
- Coordinate system : standard DH Coordinate system of the model i-1 Fixed to the connecting rod i On
- Homogeneous transformation steps :
- characteristic : General selection MDH Model ,Modified DH The model adopts a new connecting rod constraint , The reaction of connecting rod parameters is clearer and more real in some aspects . Compared with the standard model ,MDH The model coordinate system uses a unified definition method , It can better deal with tree structure 、 More problems such as closed-loop structure , The modeling process is more flexible and convenient
2. Lagrangian dynamic method
1) The basic idea
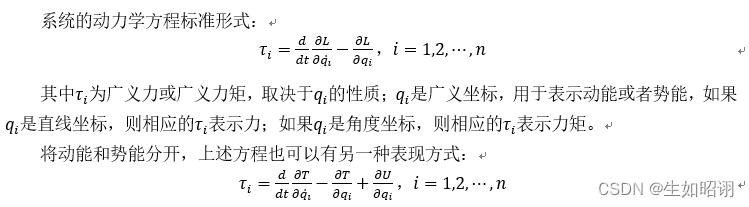
- Lagrange function L: Kinetic energy of the system T(Ek) And potential energy U(Ep) The difference between the , For all mechanical systems, it can be expressed in any coordinate system , Cartesian coordinates also apply ;

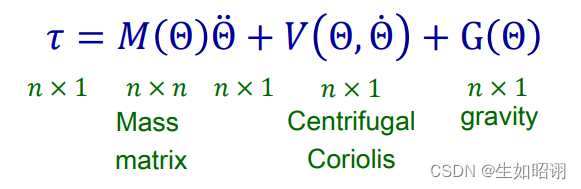
The kinetic equation :
Basic steps :
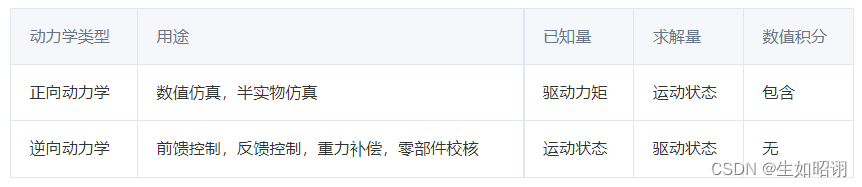
2) Forward and inverse problems
Positive problem : Known control variables , That is, the driving torque and driving force of each joint , According to the laws of Physics , Calculate joint motion , Including displacement 、 Speed and acceleration ;
Inverse problem : When the joint trajectory is known, the joint control torque and driving force are inversely solved ;
边栏推荐
猜你喜欢
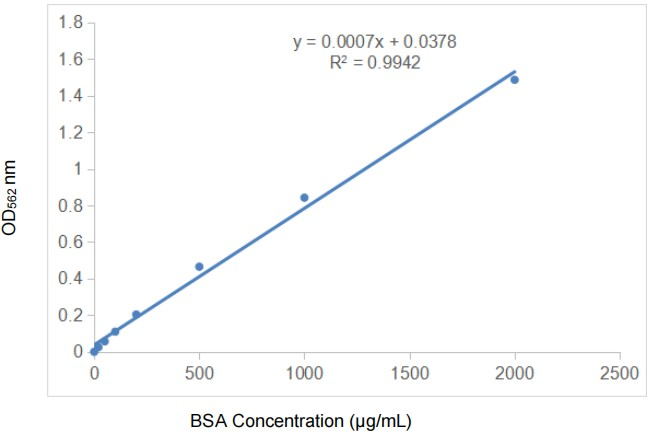
快速定量,Abbkine 蛋白质定量试剂盒BCA法来了!
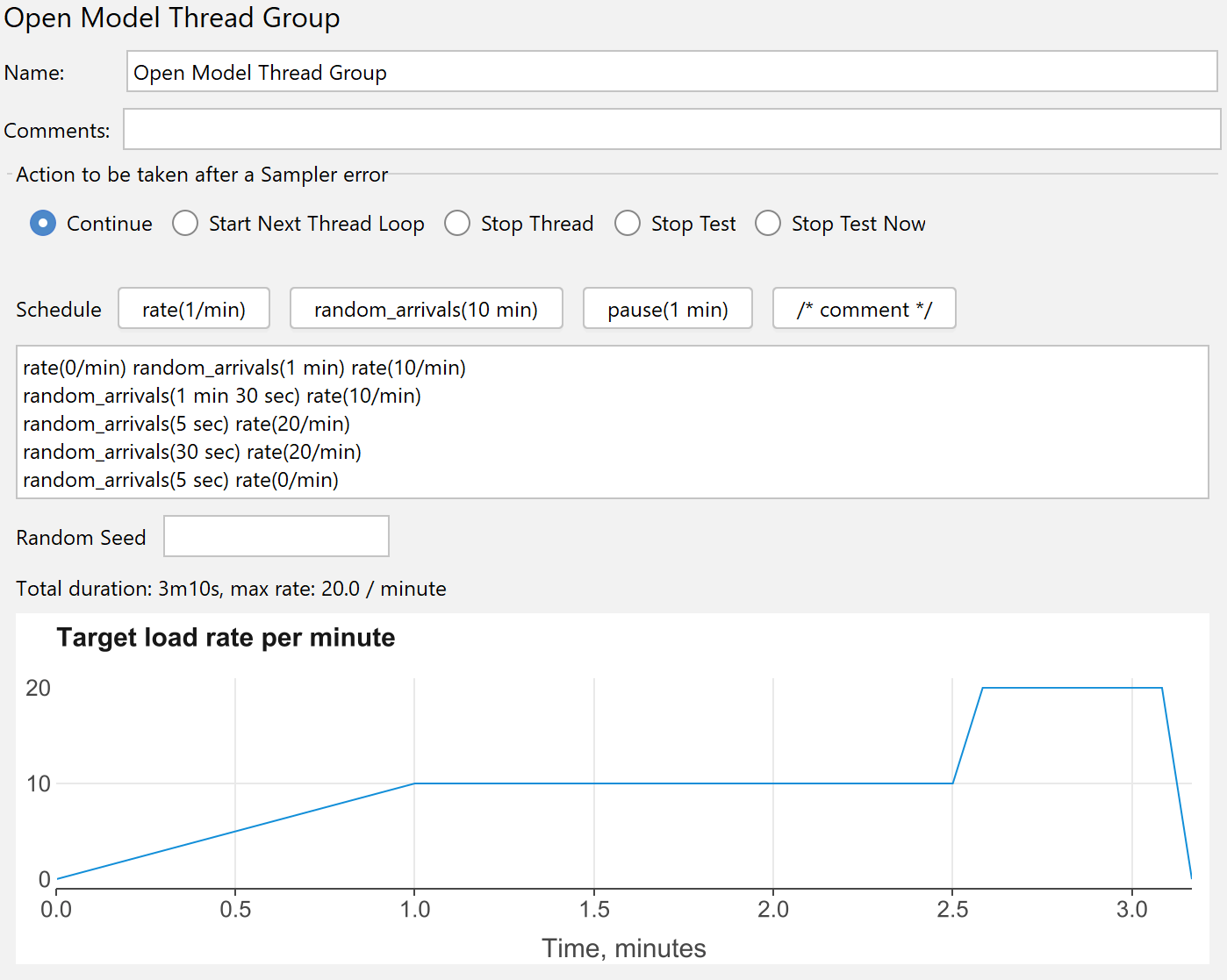
Jmeter 5.5版本发布说明
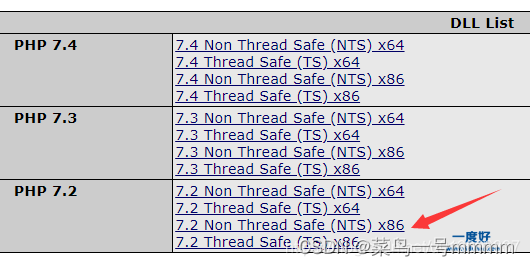
Installing redis and windows extension method under win system

POI export to excel: set font, color, row height adaptation, column width adaptation, lock cells, merge cells

ESXI挂载移动(机械)硬盘详细教程

2022年全国所有A级景区数据(13604条)
如何给目标机器人建模并仿真【数学/控制意义】
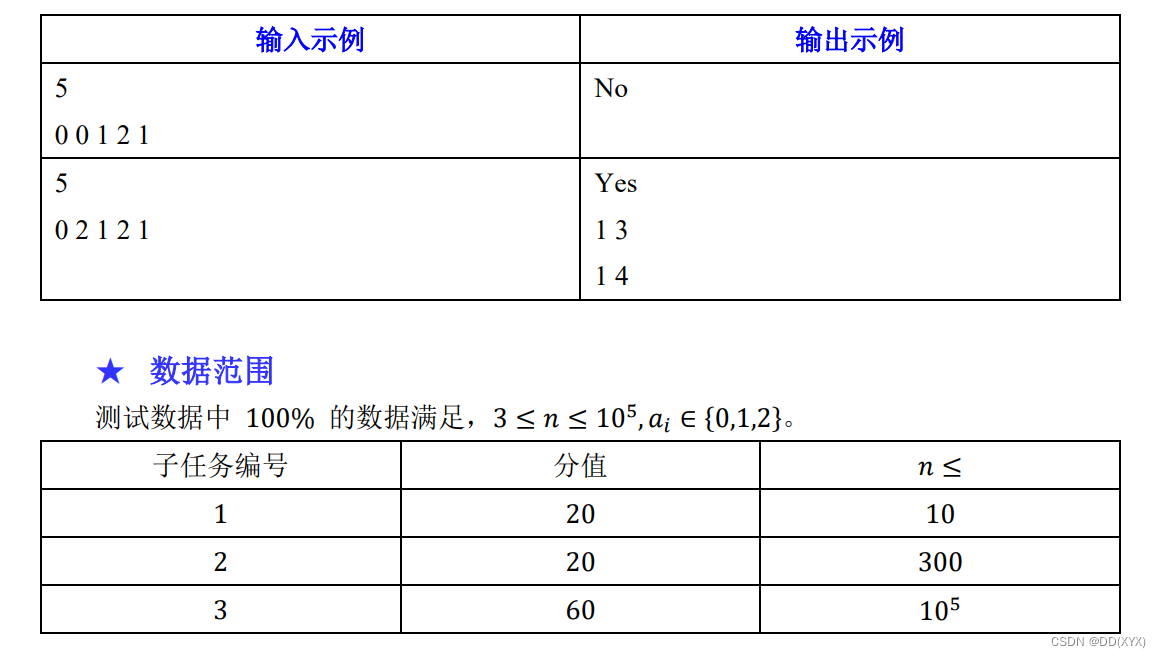
【NOI模拟赛】区域划分(结论,构造)
JWT certification
CompletableFuture使用详解
随机推荐
Basic introduction of JWT
Take you to brush (niuke.com) C language hundred questions (the first day)
多学科融合
Linear algebra (1)
MySQL (x)
LM11丨重构K线构建择时交易策略
Stack and queue-p78-8 [2011 unified examination true question]
from . onnxruntime_ pybind11_ State Import * noqa ddddocr operation error
.net core 访问不常见的静态文件类型(MIME 类型)
多个kubernetes集群如何实现共享同一个存储
Learning notes | data Xiaobai uses dataease to make a large data screen
偏执的非合格公司
一条慢SQL拖死整个系统
String (explanation)
Installing redis and windows extension method under win system
ESXI挂载移动(机械)硬盘详细教程
Kotlin之 Databinding 异常
Config distributed configuration center
Programmers' daily | daily anecdotes
leetcode 509. Fibonacci Number(斐波那契数字)