当前位置:网站首页>Multi function event recorder of the 5th National Games of the Blue Bridge Cup
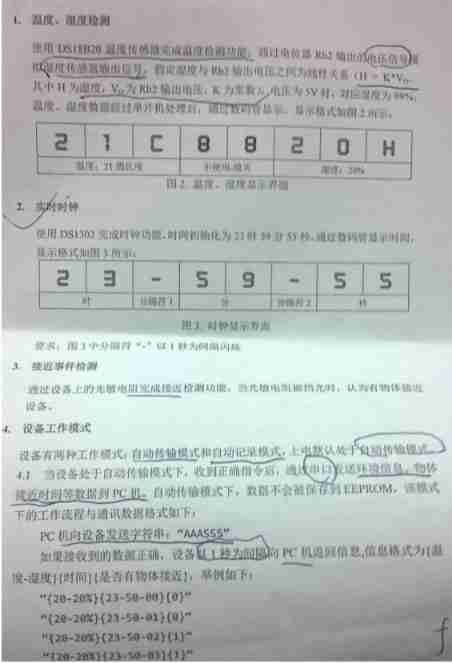
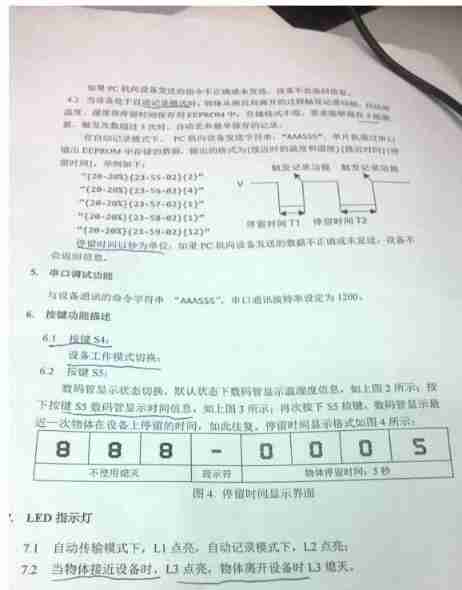
Multi function event recorder of the 5th National Games of the Blue Bridge Cup
2022-07-06 02:07:00 【Miseñor】
I feel this session is too difficult , Almost all of them are used ( Except ultrasound ), But the serial port is still not very good at writing , The function is written , But it doesn't run in the main function . And I don't know why , Photosensitive that becomes 03 The passage , It's weird , It's completely opposite to the previous .
subject :( No electronic file found , That's all )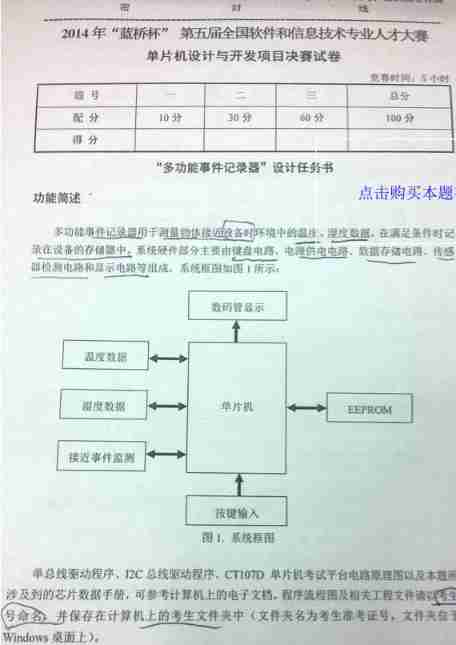
Code :
main.c
//#include"reg52.h"
#include <STC12C5A60S2.H>
#include"intrins.h"
#include"ds1302.h"
#include"onewire.h"
#include"iic.h"
int temperature;
unsigned int urat;
int code write_add[]={
0x80,0x82,0x84};
int code read_add[]={
0x81,0x83,0x85};
int time[]={
0x55,0x59,0x23};
unsigned int code xianshi[]={
0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf,0xc6,0x89};
sbit S4=P3^3;
sbit S5=P3^2;
int smg_mode=0;
int work_mode=0;// Automatically
int RD_1,RD_3;
int last_time;// residence time
int led_work=0xff;
int eeprom_time;
void choose_573(int i)
{
switch(i)
{
case(0):P2=(P2&0x1f)|0x00;break;// close
case(4):P2=(P2&0x1f)|0x80;break;//Y4
case(5):P2=(P2&0x1f)|0xa0;break;//Y5
case(6):P2=(P2&0x1f)|0xc0;break;//Y6
case(7):P2=(P2&0x1f)|0xe0;break;//Y7
}
}
void init_system()
{
choose_573(4);
P0=0xff;
choose_573(5);
P0=0x00;
choose_573(0);
}
//=======================================time
void write_time()
{
int i;
Write_Ds1302_Byte(0x8e,0x00);
for(i=0;i<3;i++)
{
Write_Ds1302_Byte(write_add[i],time[i]);
}
Write_Ds1302_Byte(0x8e,0x80);
}
void read_time()
{
int i;
for(i=0;i<3;i++)
{
time[i]=Read_Ds1302_Byte(read_add[i]);
}
}
//=======================================
//=======================================temperature rd1 rd3
void get_temperature()
{
temperature=rd_temperature();
}
void get_rd1()// photosensitive
{
RD_1=Rd1();
}
void get_rd3()// resistance
{
RD_3=Rd3();
}void Timer0Init(void) //5 millisecond @11.0592MHz
{
AUXR |= 0x80; // Timer clock 1T Pattern
TMOD &= 0xF0; // Set timer mode
TL0 = 0x00; // Set the initial timing value
TH0 = 0x28; // Set the initial timing value
TF0 = 0; // eliminate TF0 sign
TR0 = 1; // Timer 0 Start timing
ET0=1;
EA=1;
}
int count_1;
void service_time0() interrupt 1
{
if(RD_3<=100)
{
count_1++;
last_time=count_1/200;
}
else
{
count_1=0;
// last_time=0; // Timing zero elimination
}
}
//=======================================
//=======================================key_board
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 108;
j = 145;
do
{
while (--j);
} while (--i);
}
void key_board()
{
if(S5==0)
{
Delay10ms();
if(S5==0)
{
smg_mode++;
if(smg_mode>=3)
{
smg_mode=0;
}
}
while(!S5);
}
if(S4==0)
{
Delay10ms();
if(S4==0)
{
work_mode++;
if(work_mode>=2)
{
work_mode=0;
}
}
while(!S4);
}
}
//=======================================
//=======================================smg
void Delay300us() //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 4;
j = 54;
do
{
while (--j);
} while (--i);
}
void SMG(int wei,int dat)
{
choose_573(6);
P0=0x80>>(wei-1);
choose_573(7);
P0=xianshi[dat];
choose_573(0);
Delay300us();
choose_573(7);
P0=xianshi[10];
choose_573(0);
}
void smg_display()
{
if(smg_mode==0)
{
SMG(1,13);
SMG(2,RD_1%10);
SMG(3,RD_1/10);
SMG(4,10);
SMG(5,10);
SMG(6,12);
SMG(7,temperature%10);
SMG(8,temperature/10);
}
if(smg_mode==1)
{
SMG(1,time[0]%16);
SMG(2,time[0]/16);
if(time[0]%2==0)
{
SMG(3,10);
}
else
{
SMG(3,11);
}
SMG(4,time[1]%16);
SMG(5,time[1]/16);
if(time[0]%2==0)
{
SMG(6,10);
}
else
{
SMG(6,11);
}
SMG(7,time[2]%16);
SMG(8,time[2]/16);
}
if(smg_mode==2)
{
SMG(1,last_time%10);
SMG(2,(last_time%100)/10);
SMG(3,(last_time%1000)/100);
SMG(4,(last_time%10000)/1000);
SMG(5,11);
// SMG(6,RD_3%10);
// SMG(7,(RD_3%100)/10);
// SMG(8,(RD_3%1000)/100);
SMG(6,10);
SMG(7,10);
SMG(8,10);
}
}
//=======================================
//======================================= A serial port
//void UartInit(void) //[email protected]
//{
// SCON = 0x50; //8 Bit data , Variable baud rate
// AUXR |= 0x40; // Timer clock 1T Pattern
// AUXR &= 0xFE; // A serial port 1 Select timer 1 Baud rate generator
// TMOD &= 0x0F; // Set timer mode
// TL1 = 0xE0; // Set the initial timing value
// TH1 = 0xFE; // Set the initial timing value
// ET1 = 0; // Disable timer %d interrupt
// TR1 = 1; // Timer 1 Start timing
//
// ES=1;
// EA=0;
//}
//void service_Uart() interrupt 4
//{
// if(RI==1)
// {
// urat=SBUF;
// RI=0;
// }
//}
//void sendByte(unsigned char dat)
//{
// SBUF=dat;
// while(TI=0);
// TI=0;
//}
//void sendString(unsigned char *str)
//{
// while(*str!='\0')
// {
// sendByte(*str++);
// }
//}
//void urat_work()
//{
// unsigned int *temp_urat=&temperature;
// if(RD_3<=30)
// {
// sendString(temp_urat);
// }
//}
//=======================================
//=======================================led
void led_display()
{
if(work_mode==0)
{
led_work=(led_work&0xfe)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfe)|0x01;
choose_573(4);
P0=led_work;
choose_573(0);
}
if(work_mode==1)
{
led_work=(led_work&0xfd)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfd)|0x02;
choose_573(4);
P0=led_work;
choose_573(0);
}
if(RD_3<=100)
{
led_work=(led_work&0xfb)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfb)|0x04;
choose_573(4);
P0=led_work;
choose_573(0);
}
}
//=======================================
//=======================================eeprom
void eeprom_time_work()
{
if(RD_3>=100)
{
Delay300us();
if(RD_3<=100)
{
eeprom_time++;
}
}
}
void eeprom()
{
if(work_mode==1)
{
if(eeprom_time%5==0)
{
write_EEPROM(0x01,temperature);
write_EEPROM(0x02,RD_3);
write_EEPROM(0x03,time[2]);
write_EEPROM(0x04,time[1]);
write_EEPROM(0x05,time[0]);
write_EEPROM(0x06,last_time);
}
if(eeprom_time%5==1)
{
write_EEPROM(0x11,temperature);
write_EEPROM(0x12,RD_3);
write_EEPROM(0x13,time[2]);
write_EEPROM(0x14,time[1]);
write_EEPROM(0x15,time[0]);
write_EEPROM(0x16,last_time);
}
if(eeprom_time%5==2)
{
write_EEPROM(0x21,temperature);
write_EEPROM(0x22,RD_3);
write_EEPROM(0x23,time[2]);
write_EEPROM(0x24,time[1]);
write_EEPROM(0x25,time[0]);
write_EEPROM(0x26,last_time);
}
if(eeprom_time%5==3)
{
write_EEPROM(0x31,temperature);
write_EEPROM(0x32,RD_3);
write_EEPROM(0x33,time[2]);
write_EEPROM(0x34,time[1]);
write_EEPROM(0x35,time[0]);
write_EEPROM(0x36,last_time);
}
if(eeprom_time%5==4)
{
write_EEPROM(0x41,temperature);
write_EEPROM(0x42,RD_3);
write_EEPROM(0x43,time[2]);
write_EEPROM(0x44,time[1]);
write_EEPROM(0x45,time[0]);
write_EEPROM(0x46,last_time);
}
}
}
//=======================================
void main()
{
init_system();
write_time();
Timer0Init();
while(1)
{
key_board();
get_temperature();
get_rd1();
get_rd3();
smg_display();
read_time();
led_display();
eeprom_time_work();
eeprom();
}
}
onewire.c
/* Program description : Single bus driver Software environment : Keil uVision 4.10 Hardware environment : CT107 SCM comprehensive training platform ( External crystal oscillator 12MHz) STC89C52RC Single chip microcomputer Japan period : 2011-8-9 */
#include "reg52.h"
sbit DQ = P1^4; // Single bus interface
// Single bus delay function
void Delay_OneWire(unsigned int t) //STC89C52RC
{
t=t*12;
while(t--);
}
// Through a single bus to DS18B20 Write a byte
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
// from DS18B20 Read a byte
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20 Device initialization
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
int temper;
unsigned char rd_temperature(void)
{
int HBS,LBS;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
Delay_OneWire(200);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
LBS=Read_DS18B20();
HBS=Read_DS18B20();
temper=HBS;
temper=(temper<<4)|(LBS>>4);
return temper;
}
onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
unsigned char rd_temperature(void); //; ;
#endif
iic.c
/* Program description : IIC Bus driver Software environment : Keil uVision 4.10 Hardware environment : CT107 SCM comprehensive training platform 8051,12MHz Japan period : 2011-8-9 */
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
// Bus pin definition
sbit SDA = P2^1; /* cable */
sbit SCL = P2^0; /* Clock line */
void IIC_Delay(unsigned char i)
{
do{
_nop_();}
while(i--);
}
// Bus start condition
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
// Bus stop condition
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Send reply
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0: The reply ,1: Non response
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Waiting for an answer
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
// adopt I2C The bus sends data
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
// from I2C Data is received on the bus
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
int Rd1()// resistance
{
int temp;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x01);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
temp=temp*0.388+0.5;
return temp;
}
int Rd3()
{
int temp_1;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp_1=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp_1;
}
void write_EEPROM(int add,int dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
int read_EEPROM(int add)
{
int temp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
int Rd1();
int Rd3();
int read_EEPROM(int add);
void write_EEPROM(int add,int dat);
#endif
ds1302.c
/* Program description : DS1302 The driver Software environment : Keil uVision 4.10 Hardware environment : CT107 SCM comprehensive training platform 8051,12MHz Japan period : 2011-8-9 */
#include <reg52.h>
#include <intrins.h>
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302 Reset
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte( unsigned char address );
#endif
边栏推荐
- 剑指 Offer 38. 字符串的排列
- [solution] add multiple directories in different parts of the same word document
- ClickOnce does not support request execution level 'requireAdministrator'
- Tensorflow customize the whole training process
- 01.Go语言介绍
- Pangolin Library: subgraph
- Basic operations of database and table ----- set the fields of the table to be automatically added
- Comments on flowable source code (XXXV) timer activation process definition processor, process instance migration job processor
- How to improve the level of pinduoduo store? Dianyingtong came to tell you
- Win10 add file extension
猜你喜欢

Computer graduation design PHP college student human resources job recruitment network
NiO related knowledge (II)

PHP campus movie website system for computer graduation design

【Flask】官方教程(Tutorial)-part1:项目布局、应用程序设置、定义和访问数据库

Derivation of Biot Savart law in College Physics
leetcode3、實現 strStr()

Basic operations of databases and tables ----- primary key constraints

02. Go language development environment configuration

500 lines of code to understand the principle of mecached cache client driver

Campus second-hand transaction based on wechat applet
随机推荐
Publish your own toolkit notes using NPM
同一个 SqlSession 中执行两条一模一样的SQL语句查询得到的 total 数量不一样
抓包整理外篇——————状态栏[ 四]
How to upgrade kubernetes in place
Have a look at this generation
I like Takeshi Kitano's words very much: although it's hard, I will still choose that kind of hot life
The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
Xshell 7 Student Edition
2022 PMP project management examination agile knowledge points (8)
NumPy 数组索引 切片
module ‘tensorflow. contrib. data‘ has no attribute ‘dataset
Computer graduation design PHP enterprise staff training management system
Redis daemon cannot stop the solution
NiO related knowledge (II)
干货!通过软硬件协同设计加速稀疏神经网络
Flutter Doctor:Xcode 安装不完整
[flask] static file and template rendering
Cookie concept, basic use, principle, details and Chinese transmission
Luo Gu P1170 Bugs Bunny and Hunter
Mongodb problem set