当前位置:网站首页>Reading classic literature -- Suma++
Reading classic literature -- Suma++
2022-07-02 06:05:00 【Hermit_ Rabbit】
0. brief introduction
As a technology blogger , The most important thing is to constantly learn new knowledge , The best way to learn is to keep reading new articles , And constantly learn and summarize the ideas and methods of predecessors . So bloggers plan to open a new series to introduce . Here is to introduce 《SuMa++: Efficient LiDAR-based Semantic SLAM》 This paper . The link of the original paper is :https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chen2019iros.pdf. The main frame below is Ren Qian Doctor Blog The content of , Joined the author's personal learning and understanding .
SUMA++
1. Article contribution
Reliable high-precision positioning and mapping are the key links of auto drive system . In addition to high-precision geometric information , The map should also contain semantic information , Provide a basis for the intelligent behavior of the carrier . But in the real world , The existence of moving objects will make the mapping process more complex , Because it will pollute the map and affect the positioning effect . In this article , We are in tradition Drawing based on surface (surfelbased mapping) Based on the method , increase Fusion of semantic information To solve the above problems . Semantic information is extracted through neural network , The network gives category labels to all points in the point cloud , Thus, when we use surface to build drawings , The result is a surface with labels . In this way , It can not only filter out dynamic objects , Moreover, semantic information can be used to constrain mileage estimation , To mention the accuracy of the map .
In the article, the author mentioned that the main two contributions are
Semantic segmentation of point cloud , Recognize dynamic objects according to semantic information , And remove from the map .
Data association of objects with semantic labels , Establish constraint relationship with geometric information , So as to improve the accuracy of drawing .
2. The whole idea
The following figure for SuMa++ Overall network structure , You can see that the main process is divided into the following four parts
Semantic segmentation of point cloud through network
Fill with overflow (flood-fill) Method to eliminate the wrong category label
Use filters for dynamic object detection , And remove dynamic objects
Set up with semantic information constraints ICP Model , Optimize mileage accuracy

Besides SuMa++ Cannot do without Surfel Map ,Surfel There are some predefined concepts in the map :
- Depth map ( V D V_D VD):t Point cloud at all times P Spherical projection of , Get depth image ( Point cloud raw data limited by polar coordinate distance ).
- Normal vector map ( N D N_D ND): According to the above V D V_D VD The normal vector projection of the spherical projection obtained , Radar polar coordinate system projection similar to the picture .
- Map perspective ( V M V_M VM&& N M N_M NM): Project the above two steps onto the map .( features ICP Update pose increment , Accumulate pose increments to get the current pose )
- Bin quilt : Maps are represented using bin , From one position , A normal vector and a radius , Two time stamps ( Creation time and last update time )
- Stable logarithmic probability l s l_s ls: A binary Bayesian filter is maintained to determine whether a bin is considered stable or unstable .
- Semantic map ( S D S_D SD):RangeNet++ Semantic segmentation of the spherical projection of each needle generates a range picture , Number point by point from the perspective of the sensor .( Semantic segmentation )
2.1 Point cloud semantic segmentation
Semantic segmentation uses RangeNet++ Method , Its main content is in another paper , This paper does not make much improvement on this method .RangeNet++ With Darknet53 Backbone As a basis, it is improved to RangeNet53, So as to realize the segmentation of depth image , And re map to the point cloud . For details, please refer to This article .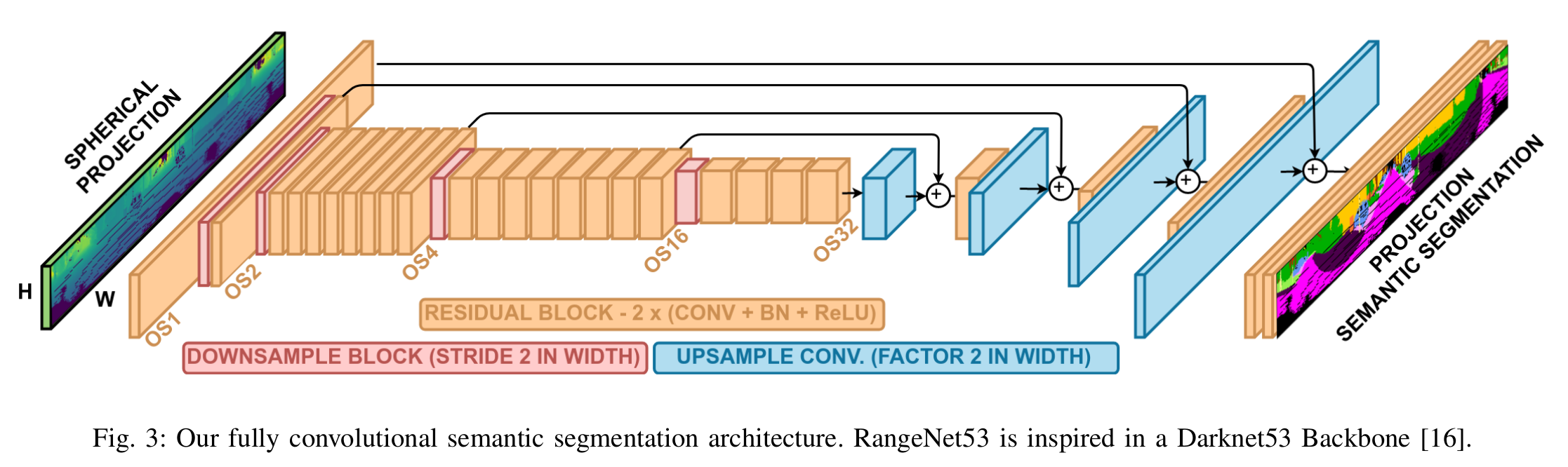
2.2 Fill with water
Flooding filling is a common method in image processing , It is used here to correct the error classification , Avoid the bad influence of classification errors on subsequent links , The left side in the figure below is the part of the dotted box method in the figure on the right , First pair (a) Eliminate the error identification results in , obtain (b), Then use the surrounding tag point cloud to fill it , obtain . Last (d) The corresponding depth map is shown in .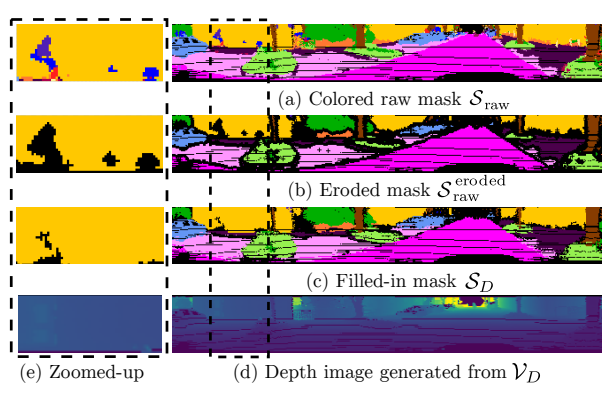
The following is the pseudo code of flooding , Inside the pretreatment , Through the original semantic mask S r a w S_{raw} Sraw, And the corresponding fixed-point map V D V_D VD,( stay S r a w S_{raw} Sraw The value of each pixel in is a semantic number , The corresponding pixel in the fixed-point map contains the nearest 3D Point in the radar coordinate system 3d coordinate .) First remove in scope d There is at least one pixel with different semantic number in the neighborhood , Combine this mask with fixed-point depth information , Set the blank boundary pixel to the neighbor labeled pixel , If the distance between the corresponding points is the same , That is, less than a certain threshold , I.e. filling .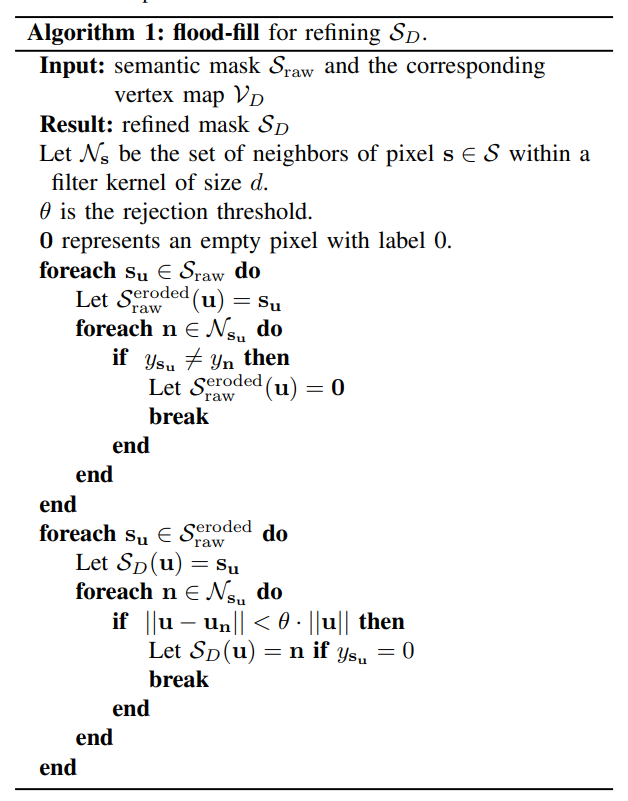
2.3 Filter out moving objects
The recognition of dynamic objects is based on the probability of objects appearing in the same position . In particular , That is, if in this frame , An object appears at a certain position S D S_D SD, At this time, the position of the current frame point cloud S D S_D SD Map to the location in the map S M S_M SM in , If in the next frame , Object object S D 1 S_{D_1} SD1 Still on the map S M S_M SM It's about , And it appears in the same position for many consecutive frames S M S_M SM, Then it is static , conversely , The position detected in each frame changes , Then it is mobile .
Here is a stable and important concept , That is to say Surfel Map ,Surfel Map innovation uses the bin formed by the points in the map as the object , Take map consistency as an index to optimize . This paper proposes to use semantic segmentation to provide label To deal with moving objects , That is, by comparing the new observation positions S D S_D SD And what already exists in the map S M S_M SM Semantic consistency of , When we update the map , If label It's inconsistent , We assume that those facets belong to moving objects . At this time, we add a penalty o d d s odds odds Logarithmic probability to stability l s l_s ls in . After some observations , We can remove unstable bin . The following is the penalty function , among o d d s ( p ) = log ( p ( 1 − p ) − 1 ) odds(p)= \log (p (1-p)^ {-1} ) odds(p)=log(p(1−p)−1), and p s t a b l e p_{stable} pstable and p p r i o r p_{prior} pprior It is a stable bin and gives consistent measurements and a priori probabilities respectively . e x p exp exp Among them is the amount of compensation noise , a a a Is the bin normal vector n s n_s ns And the angle between the measurement normal vector , d d d Is the distance between the normal vector and the bin . The measurement normal vector is taken from N D N_D ND Normal vector map .
… Please refer to Ancient Moon House
边栏推荐
- PHP array to XML
- uni-app开发中遇到的问题(持续更新)
- Community theory | kotlin flow's principle and design philosophy
- Stc8h8k series assembly and C51 actual combat - digital display ADC, key serial port reply key number and ADC value
- Common websites for Postgraduates in data mining
- 谷歌出海创业加速器报名倒计时 3 天,创业人闯关指南提前收藏!
- Deep learning classification network -- vggnet
- PHP read file (read the specified line containing a string in the file)
- ZABBIX server trap command injection vulnerability (cve-2017-2824)
- LCD之MIPI协议的一些说明
猜你喜欢
官方零基础入门 Jetpack Compose 的中文课程来啦!

Compte à rebours de 3 jours pour l'inscription à l'accélérateur de démarrage Google Sea, Guide de démarrage collecté à l'avance!
经典文献阅读之--SuMa++

Unity Shader 学习笔记(3)URP渲染管线带阴影PBR-Shader模板(ASE优化版本)
TI毫米波雷达学习(一)

复杂 json数据 js前台解析 详细步骤《案例:一》

Shenji Bailian 3.54-dichotomy of dyeing judgment

Software testing - concept
Google Go to sea entrepreneurship accelerator registration countdown 3 days, entrepreneurs pass through the guide in advance collection!

51 single chip microcomputer - ADC explanation (a/d conversion, d/a conversion)
随机推荐
Redis Key-Value数据库 【高级】
Spark概述
经典文献阅读之--Deformable DETR
[whether PHP has soap extensions installed] a common problem for PHP to implement soap proxy: how to handle class' SoapClient 'not found in PHP
Unity Shader 学习笔记(3)URP渲染管线带阴影PBR-Shader模板(ASE优化版本)
[paper translation] gcnet: non local networks meet squeeze exception networks and beyond
PHP extensions
LCD之MIPI协议的一些说明
Style modification of Mui bottom navigation
神机百炼3.54-染色法判定二分图
如何使用MITMPROXy
Mock simulate the background return data with mockjs
vite如何兼容低版本浏览器
Introduce uview into uni app
页面打印插件print.js
浏览器原理思维导图
JS determines whether the mobile terminal or the PC terminal
500. 键盘行
500. Keyboard line
Vscode paste image plugin saves image path settings