当前位置:网站首页>Paper notes multi UAV collaborative monolithic slam
Paper notes multi UAV collaborative monolithic slam
2022-07-05 00:09:00 【DWQY】
Time :2017
author :

Implementation conditions :
many agent+ A central server . every last agent Equipped with monocular camera , The central server can communicate with all agent signal communication .agent Without any prior knowledge . Do not consider any adverse effects caused by transmission delay .
Division of labor
agent Work : Collect data + Build a local map + Transmit data
The server works :place recognition( Location recognition ),map fusion( Map fusion ),bundle adjustment( Beam adjustment )
notes :agent and server The communication frequency is not fixed
Physical structure :
Multi resource limited UAV ( Configure monocular camera , stand-alone ORB-SLAM2 Algorithm )+ Central resource control
Advantages of central type over distributed type ( In the case of limited node resources ):
1) Keep data consistent 、 Avoid double counting information
2) Big computing tasks / Delay insensitive tasks are handed over to server, The key tasks of initial calculation with limited resources
Theoretical structure :
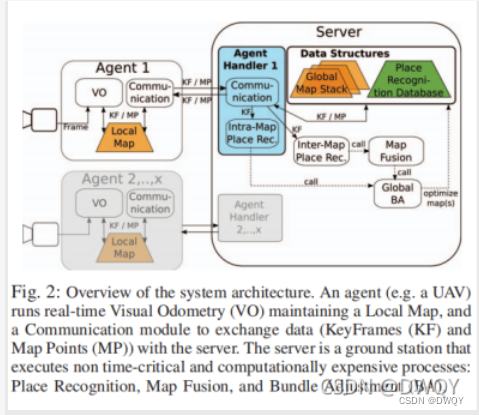
agent Include :
1)VO: Used to process image information , formation KF
2)Communication: And server communicate ( Frame transmission )
3)Local map: adopt VO Maintain local map by itself , Set up the most k individual KF, adopt Trimming The process determines the maintenance k individual KF( There is a buffer mechanism )
server Include :
1)agent Handler( Same quantity agent): Include communication( Frame transmission ) and Intra-MapPlicae( Match your own Server Map). Solve the problem of data transmission and data conversion
2)Global Map Stack: Used to store each agent Of Server Map( Initialization quantity and agent identical ), A single agent Feedback improves the agent Corresponding Server Map, many agent Encounter the same characteristic points Server Map Merge with each other .
3)Place Recognition Database: Store all agent All keyframes collected , For matching , To match the database ( because agent Limited resources , Every agent Save only N individual KF, The database is not limited )
4)Inter-Map Place( Match other Server Map, Successful matching indicates two Server Map Fusible )
5)Map Fusion: Map fusion module , The object of operation is Server Map( Two layers of : A single agent The fusion , many agent The fusion )
6)Global BA: Optimize the global map . happen Global BA There are two situations :(1)map fusion (2) Loop detected . happen Global BA Transmitted in the process KF Don't consider .
Communication model :
1)server→agent
2)agent→server→agent( When server Identify to agent When there are common characteristics , Utilize other known agent Information feedback to the original agent)
agent and server be based on ROS Message passing mechanism for communication , There is no requirement for real-time performance . Wireless network transmission , Everything is normal when connecting ,agent and server No longer communicate when disconnected . In order to reduce transmission loss, Set information threshold , For cutting .
agent issue server There is a confirmation and acceptance mechanism , Two kinds of information :Ppred and Ppar, Use current information to ensure agent The last one was sent to server Successful acceptance . about server issue agent There is no need to confirm the acceptance mechanism
The innovation and thought of this paper :
Propose a kind of collaboration SLAM The framework can achieve better perception . The experiment uses monocular vision SLAM complete , Every agent Collect data , The data to KF(keyframe Keyframes ) Is the basic unit of data structure . Collect a frame and send it to server. from server do place recognition, If a large number of identical features are extracted from two frames, it is considered as two agent Walk through the same place . use B Our experience is passed on to A, use A Our experience is passed on to B In order to realize the agent Communication between ( At the same time ), strengthening agent The local map of is complete . meanwhile server There will be a BA(bundle adjustment, Beam adjustment ). Use two frames of data to enhance the details of this part of the global map .
Experimental proof :
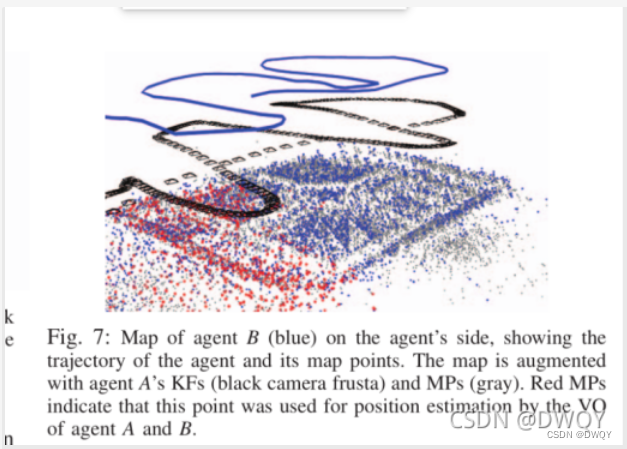
Upper figure agentB( blue ) Form your own recognition track ,agentA( black ) The resulting trajectory is used to enhance B Track of . It is obvious that the red dots on the left are more densely distributed , Explain here B The missing data of is A Make up for . Achieve a better global map .
remarks :
1.KF(Key Frame) and MP(Map Point) The relationship between ?
Every time agent The collected data is called frame (frame),tracking thread Will decide frame Is it KF(Key Frame).local map Will each KF As a point , Two KF If there are multiple matches MP Two KF Interconnection , form graph
2.Trimming Mechanism : If the buffer is empty , Take the latest one before k-1 individual KF+ have just arrived KF. If the buffer is full , The priority is to exclude ( With the help of serve) From the rest agent From KF, If you exclude all the rest agent Still greater than K, In chronological order , Throw away the old ones .k The size of depends on resource conditions . The bigger the stronger
3.server mapping There are three steps :(1) hold KF Send to three operations KF Part of (2) stay KF and MP Make a connection between (3) Conduct KF rejection
4.KF rejection: Also called redundarcy dectection, It is used to deal with different perspectives in the same position , Reduce KF Redundancy of , In order to better Global BA. Not everything happens , Just need to Global BA Only when . Thought is to make server map The smaller the better.
5.Sim(3)-transformation There are two kinds of situations :(1) agent issue server KF when , After transformation, enter server map stack (2)map merging when , Two from server map stack Of map Merge
6. There is also an extended version of this article :CCM-SLAM: Robust and Efficient Centralized Collaborative Monocular SLAM for Robotic Teams. The authors of the two articles are the same , This article is more than this one , Introduced more implementation details , There's not much new . Part of the content of this blog refers to this .
mixed material item :
Source address :https://github.com/VIS4ROB-lab/ccm_slam
Example video URL :https://www.youtube.com/watch?v=L9rHht8fE5E
Due to the limited level of the author , If there are mistakes , Please point out at the bottom of the comment area , thank you !
边栏推荐
- The waterfall flow layout demo2 (method 2) used by the uniapp wechat applet (copy and paste can be used without other processing)
- go踩坑——no required module provides package : go.mod file not found in current directory or any parent
- Cross domain request
- 企业应用业务场景,功能添加和修改C#源码
- 人脸识别5- insight-face-paddle-代码实战笔记
- C语言中sizeof操作符的坑
- Advanced template
- "Xiaodeng" domain password policy enhancer in operation and maintenance
- 同事的接口文档我每次看着就头大,毛病多多。。。
- go踩坑——no required module provides package : go.mod file not found in current directory or any parent
猜你喜欢
In the enterprise, win10 turns on BitLocker to lock the disk, how to back up the system, how to recover when the system has problems, and how to recover quickly while taking into account system securi
端口映射和端口转发区别是什么
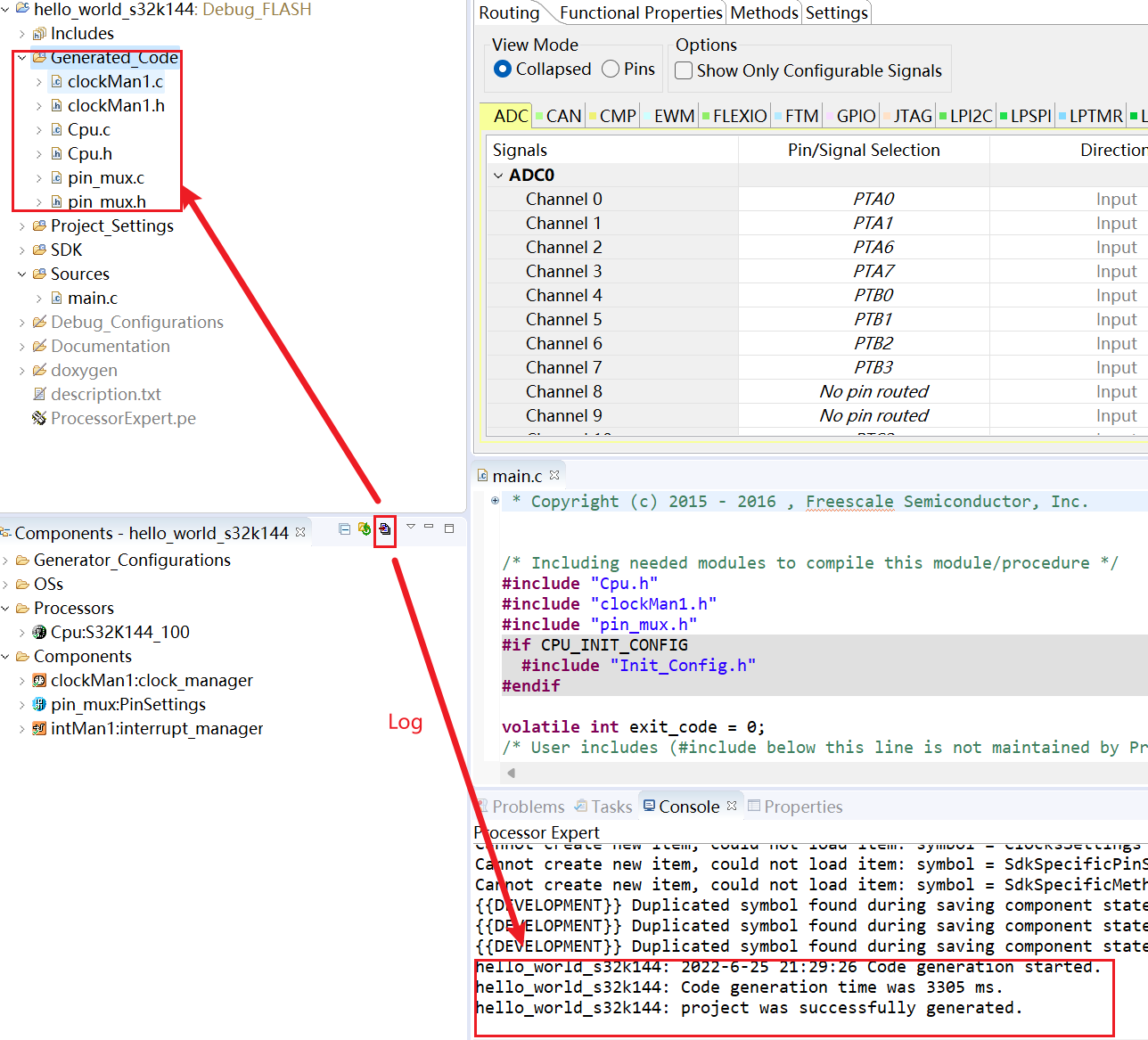
S32 design studio for arm 2.2 quick start

Hong Kong Jewelry tycoon, 2.2 billion "bargain hunting" Giordano
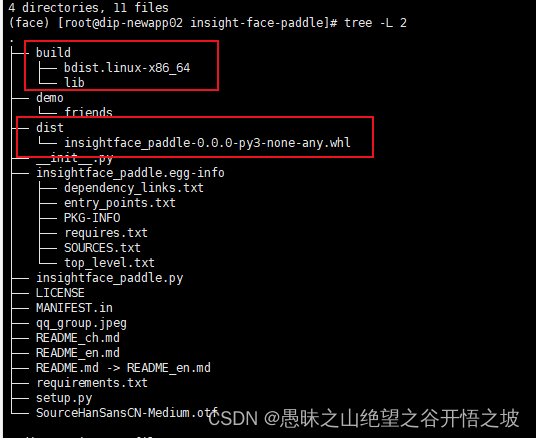
人脸识别5- insight-face-paddle-代码实战笔记
Face recognition 5- insight face padding code practice notes
![P3304 [sdoi2013] diameter (diameter of tree)](/img/5c/984675bf4517481f80f54657c6c7ad.png)
P3304 [sdoi2013] diameter (diameter of tree)

使用快解析搭建自己的minecraft服务器
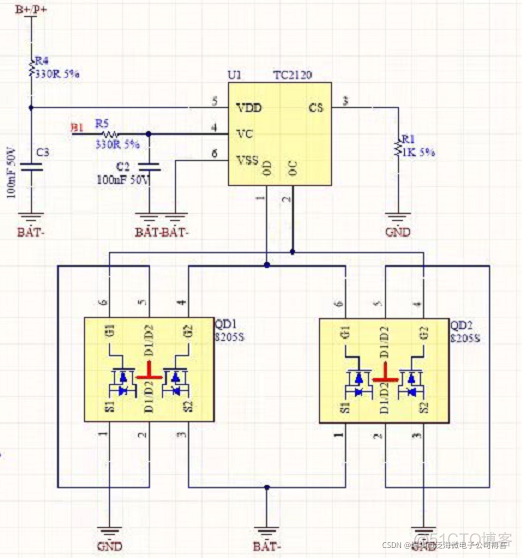
Specification for fs4061a boost 8.4v charging IC chip and fs4061b boost 12.6V charging IC chip datasheet
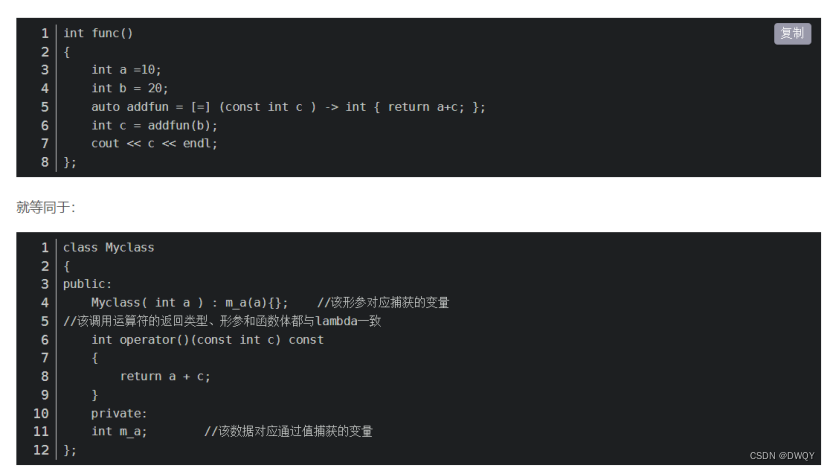
lambda表达式
随机推荐
如何有效对直流列头柜进行监测
Hisilicon 3559 universal platform construction: YUV422 pit stepping record
人脸识别5- insight-face-paddle-代码实战笔记
How many triangles are there in the golden K-line diagram?
他做国外LEAD,用了一年时间,把所有房贷都还清了
[论文阅读] TUN-Det: A Novel Network for Thyroid Ultrasound Nodule Detection
企业应用业务场景,功能添加和修改C#源码
Is it safe to open an account in the College of Finance and economics? How to open an account?
Introduction to ACM combination counting
Go step on the pit - no required module provides package: go mod file not found in current directory or any parent
Expand your kubecl function
AcWing164. 可达性统计(拓扑排序+bitset)
[paper reading] cavemix: a simple data augmentation method for brain vision segmentation
【雅思阅读】王希伟阅读P4(matching2段落信息配对题【困难】)
Hong Kong Jewelry tycoon, 2.2 billion "bargain hunting" Giordano
[IELTS reading] Wang Xiwei reading P3 (heading)
基本放大电路的学习
Instructions for go defer
Business implementation - the log is written to the same row of data
What is the difference between port mapping and port forwarding