当前位置:网站首页>Nine Qi single chip microcomputer ny8b062d single key control four LED States
Nine Qi single chip microcomputer ny8b062d single key control four LED States
2022-07-04 23:51:00 【51CTO】
/* =========================================================================
* Project: Single key control 4 Kind of LED state
* File: Single key control 4 Kind of LED state
* Description: Single key control 4 Kind of LED state
*
*
* Author: Jimp
* Version: V1.0
* Date: 2020/05/22
=========================================================================*/
//--------------- File Include ---------------------------------------------
//--------------------------------------------------------------------------
#include <ny8.h>
#include <stdint.h>
#include "ny8_constant.h"
#define UPDATE_REG(x) __asm__("MOVR _" #x ",F")
#define unchar unsigned char
#define unint unsigned int
uint8_t myvar;
__sbit flag = myvar:0; // Define the control operator
__sbit key = PORTB:0;
__sbit light1 = PORTA:7;
__sbit light2 = PORTA:6;
unchar Mod; // Define the lighting mode
void isr(void) __interrupt(0)
{
if(INTFbits.T0IF)
{
static unsigned int cnt= 0;
TMR0 = 0;
INTF= (unsigned char)~(C_INT_TMR0); // Clear T0IF flag bit
cnt ++;
if(cnt >= 250)
{
cnt = 0;
light1 = ~light1;
light2 = ~light2;
}
}
}
void lnit_Mod() // Initialization function
{
IOSTA = ~IOSTA; // Set up A The mouth is the output
PORTA = 0xFF;
IOSTB = C_PB0_Input;
flag = 1;
key = 1;
Mod = 0;
light1 = 0;
light2 = 0;
}
void lnit_Timer() // Interrupt initialization
{
DISI(); // Disable interrupt
PCON1 = C_TMR0_Dis;
TMR0 = 0;
T0MD = C_PS0_TMR0 | C_PS0_Div8; // Pre frequency division is allocated to TMR0
INTE = C_INT_TMR0;
ENI(); // Enable interrupt
}
void delay(unint z) // The time delay function ms
{
unint x,y;
for(x = z;x > 0;x--)
for(y = 100;y > 0;y--);
}
void lnput_Mod() // State mode marker function
{
if(Mod == 4)
Mod = 0;
if(key == 0)
{
delay(5);
if(key == 0) // Delay chattering
Mod++; // The number of keystrokes is marked
}
while(!key) // Let go of the test
{;;}
}
void run() //4 Execution in three modes
{
switch(Mod)
{
case 0:{PCON1 = C_TMR0_Dis;light1 = 0;light2 = 0;}break; // All bright
case 1:{PCON1 = C_TMR0_En;}break; // Synchronous flashing
case 2:{PCON1 = C_TMR0_Dis;light1 = 1;light2 = 1;}break; // Total destruction
case 3:{PCON1 = C_TMR0_Dis;light1 = 0;light2 = 1;PCON1 = C_TMR0_En;}break; // Asynchronous flash
}
}
void main(void)
{
lnit_Mod();
lnit_Timer();
while(1)
{
lnput_Mod();
if(flag == 1) // control RUN function
{
run();
if(Mod == 1||Mod == 3)
flag = 0;
}
if(Mod == 0||Mod == 2)
flag = 1;
}
}
边栏推荐
- Cross domain request
- In June, the list of winners of "Moli original author program" was announced! Invite you to talk about the domestic database
- Application of machine learning in housing price prediction
- 高配笔记本使用CAD搬砖时卡死解决记录
- [kotlin] the third day
- OSEK standard ISO_ 17356 summary introduction
- Design of emergency lighting evacuation indication system for urban rail transit station
- 业务实现-日志写到同一个行数据里面
- MIT-6.824-lab4B-2022(万字思路讲解-代码构建)
- PMP证书续证流程
猜你喜欢
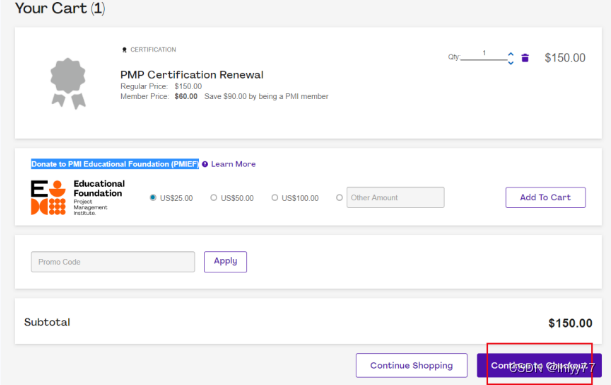
PMP证书续证流程
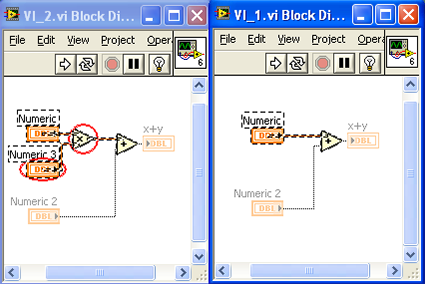
Compare two vis in LabVIEW
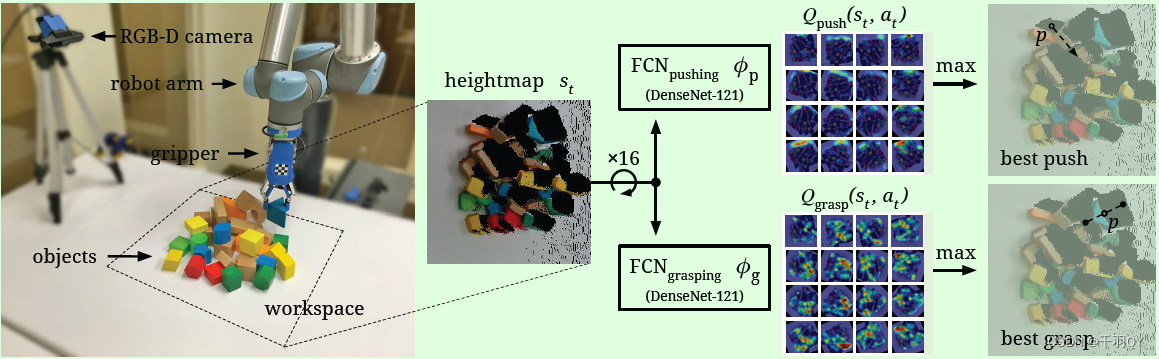
机器人强化学习——Learning Synergies between Pushing and Grasping with Self-supervised DRL (2018)
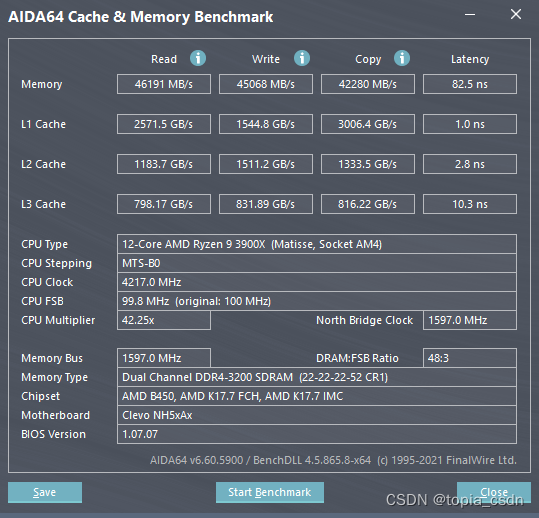
Solution record of jamming when using CAD to move bricks in high configuration notebook
The input of uniapp is invalid except for numbers
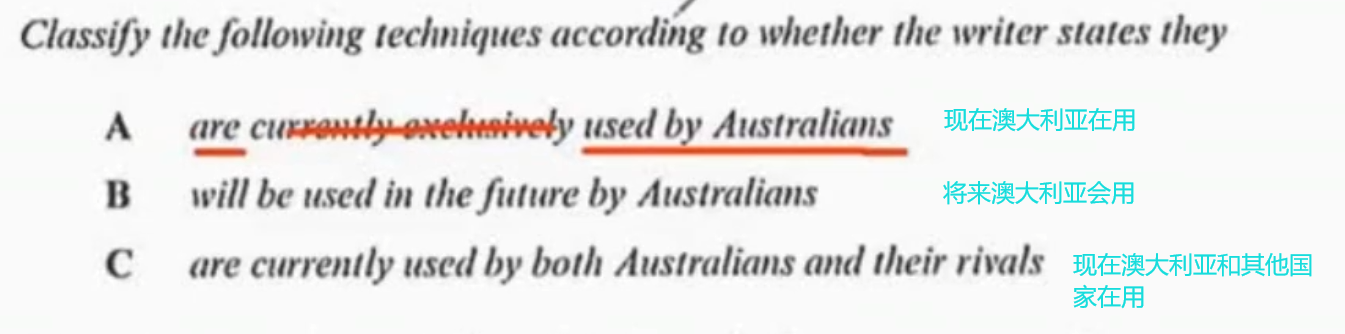
【雅思阅读】王希伟阅读P4(matching1)
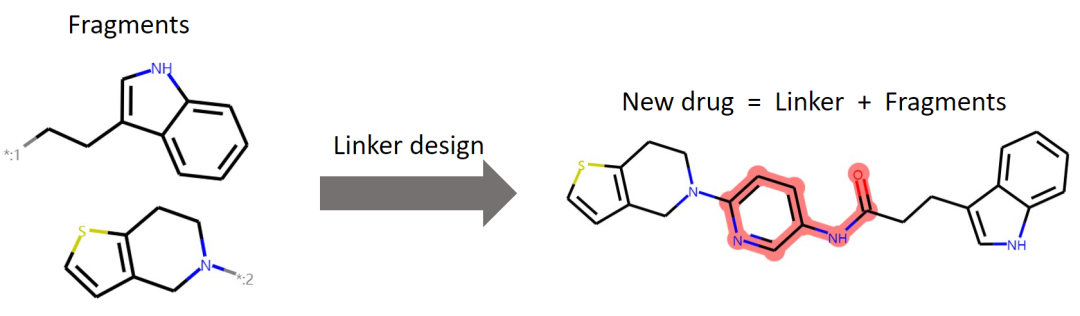
ICML 2022 || 3DLinker: 用于分子链接设计的E(3)等变变分自编码器
[IELTS reading] Wang Xiwei reading P4 (matching1)

壁仞科技研究院前沿技术文章精选

Phpcms paid reading function Alipay payment
随机推荐
Pytoch --- use pytoch to realize linknet for semantic segmentation
如何在外地外网电脑远程公司项目?
The pit of sizeof operator in C language
微服务(Microservice)那点事儿
多回路仪表在基站“转改直”方面的应用
[crawler] jsonpath for data extraction
Galera cluster of MariaDB - dual active and dual active installation settings
如何有效对直流列头柜进行监测
Using the uniapp rich text editor
解决无法通过ssh服务远程连接虚拟机
Jar批量管理小工具
打新债开户注册安全吗?有没有风险的?靠谱吗?
Build your own minecraft server with fast parsing
Data on the number of functional divisions of national wetland parks in Qinghai Province, data on the distribution of wetlands and marshes across the country, and natural reserves in provinces, cities
Font design symbol combination multifunctional wechat applet source code
模板的进阶
Why does infographic help your SEO
如果炒股开华泰证券的户,在网上开户安全吗?
PMP证书续证流程
A mining of edu certificate station