当前位置:网站首页>机器人强化学习——Learning Synergies between Pushing and Grasping with Self-supervised DRL (2018)
机器人强化学习——Learning Synergies between Pushing and Grasping with Self-supervised DRL (2018)
2022-07-04 23:11:00 【千羽QY】
论文地址:https://ieeexplore.ieee.org/document/8593986
1 简介
model-free 强化学习,Q-learning
方法:训练两个网络,分别预测像素级的push的Q-value 和 像素级的grasp的Q-value;Q-value最高的push或grasp被执行。
每个像素点的push被定义为从左向右推10cm;grasp被定义为以该点为中心,10cm为抓取宽度,水平抓取。
在测试时,图像被旋转16次,分别送入网络,因此可实现16个角度上的push和grasp。
本文采用高维action,即抓取位姿和推;QT-Opt等方法采用更低维的action,即末端偏移。
高维action在全驱动系统中是可行的,全驱动指物体的运动完全由机械手控制,如本文的抓取;
低维action更适合于欠驱动系统,需要根据系统反馈实时调整action,最终达到目标状态。欠驱动指物体的运动由环境和机械手同时决定,如预抓取、沿轨迹推物体等。
2 方法
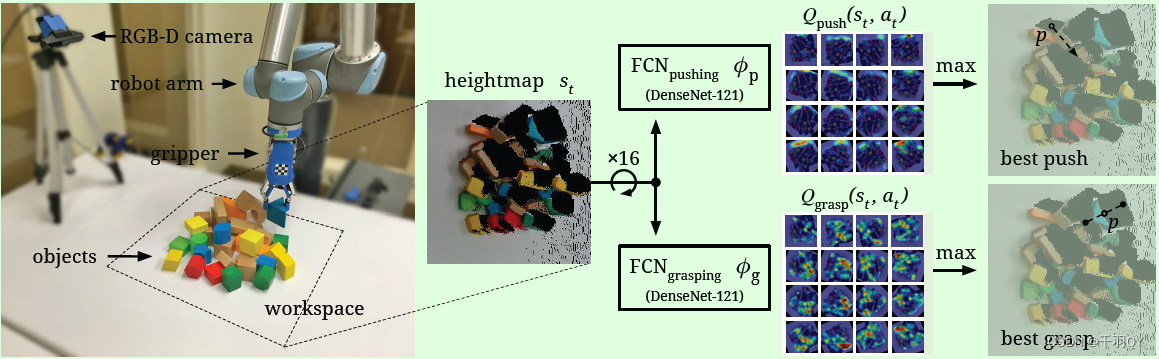
state:RGB-D图像
action:在第一节描述
grasp reward:抓取成功 reward=1。如果机械手夹爪的张开长度大于阈值,则抓取成功。
push reward:场景图像的差值大于阈值 reward=0.5。该reward鼓励push动作使场景产生变化,但没有明确地使未来的抓取更方便。
Q网络结构:两个网络的结构相同。首先分别将RGB图像和D图像送入并行的DenseNet,然后合并特征,通过卷积和差值上采样输出预测Q-value。
1、如何给push设置reward
答:场景图像的差值大于阈值 reward=0.5。该reward鼓励push动作使场景产生变化,但没有明确地使未来的抓取更方便。
2、如何训练像素级预测网络
答:只对执行action的像素点p计算梯度,其他全为0
3 想法
1、本文方法本质上还是监督学习,只不过把grasp/push的置信度标签换成了reward,本质上一样
边栏推荐
- Summary of wechat applet display style knowledge points
- QT addition calculator (simple case)
- UML diagram memory skills
- Notepad++--编辑的技巧
- [Taichi] change pbf2d (position based fluid simulation) of Taiji to pbf3d with minimal modification
- 蓝天NH55系列笔记本内存读写速度奇慢解决过程记录
- 数据库基础知识
- Servlet+JDBC+MySQL简单web练习
- Redis: redis message publishing and subscription (understand)
- The difference between debug and release
猜你喜欢

QT addition calculator (simple case)
The difference between cout/cerr/clog
Tweenmax emoticon button JS special effect
![P2181 对角线和P1030 [NOIP2001 普及组] 求先序排列](/img/79/36c46421bce08284838f68f11cda29.png)
P2181 对角线和P1030 [NOIP2001 普及组] 求先序排列
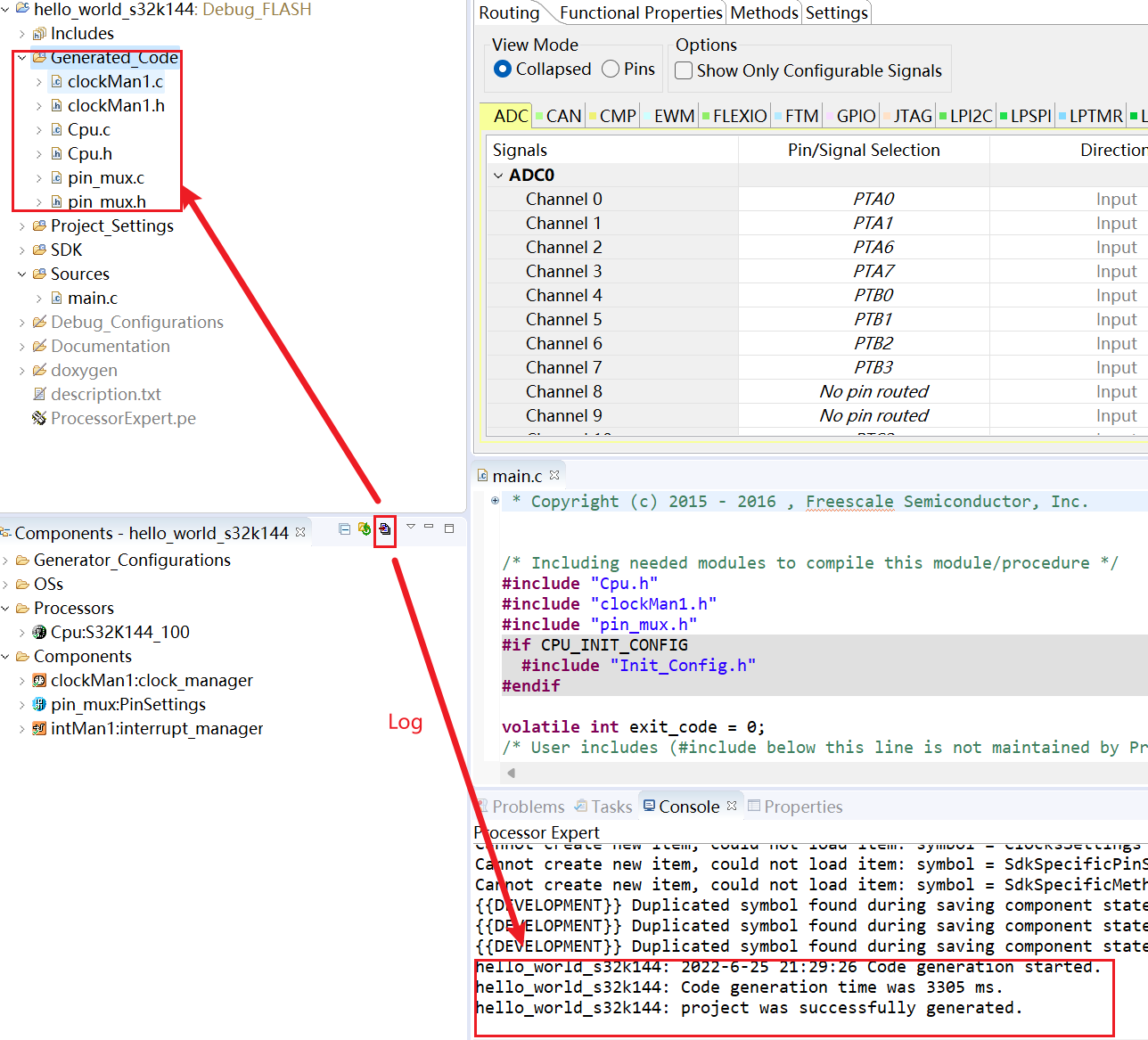
S32 design studio for arm 2.2 quick start
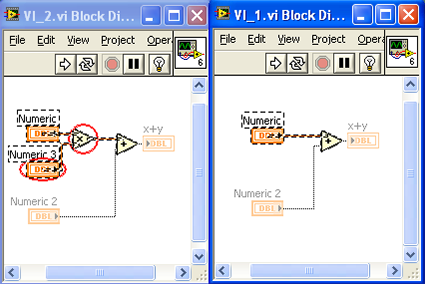
Compare two vis in LabVIEW
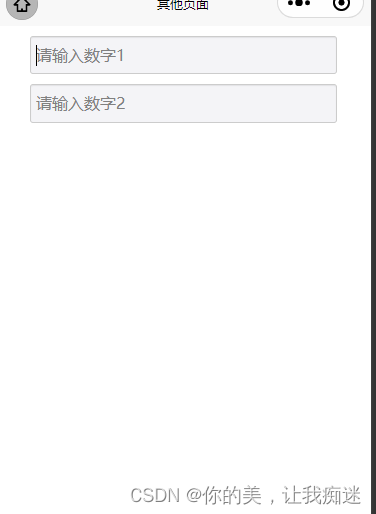
uniapp 除了数字,其他输入无效
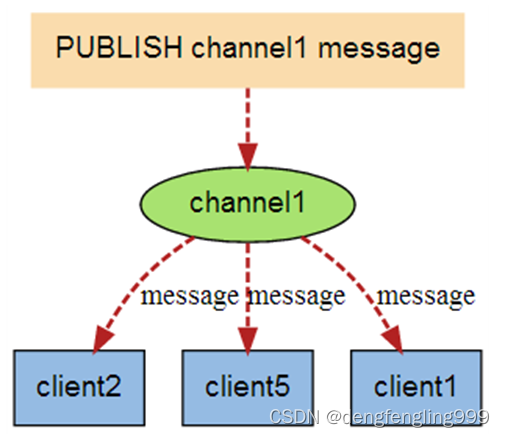
Redis:Redis消息的发布与订阅(了解)

MariaDB的Galera集群-双主双活安装设置
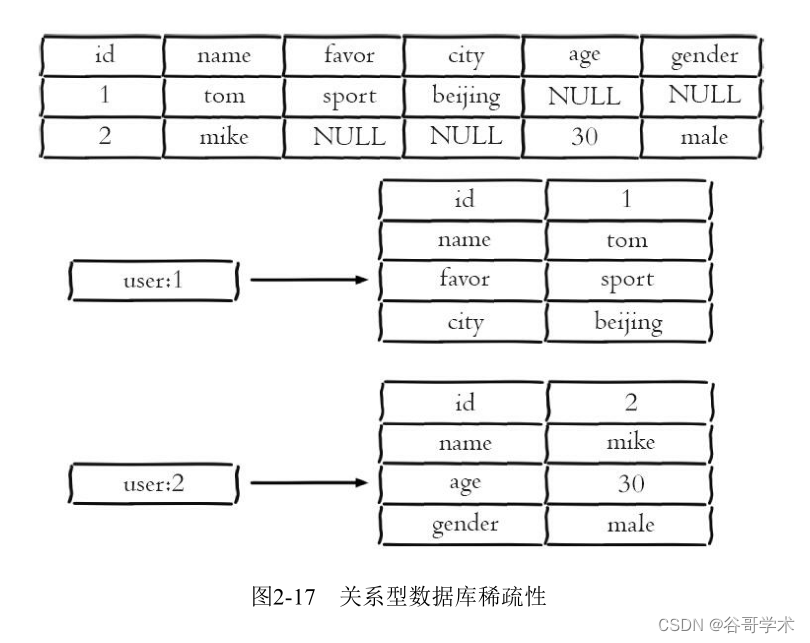
Redis getting started complete tutorial: hash description
随机推荐
高配笔记本使用CAD搬砖时卡死解决记录
C语言快速解决反转链表
Object detection based on OpenCV haarcascades
ScriptableObject
HMS core unified scanning service
[JS] - [dynamic planning] - Notes
【爬虫】数据提取之xpath
初试为锐捷交换机跨设备型号升级版本(以RG-S2952G-E为例)
Pict generate orthogonal test cases tutorial
为什么信息图会帮助你的SEO
LabVIEW中比较两个VI
Recommended collection: build a cross cloud data warehouse environment, which is particularly dry!
Redis:Redis的事务
[Jianzhi offer] 6-10 questions
Editplus-- usage -- shortcut key / configuration / background color / font size
Servlet+JDBC+MySQL简单web练习
Ffmpeg quick clip
The difference between cout/cerr/clog
Combien de temps faut - il pour obtenir un certificat PMP?
[binary tree] the maximum difference between a node and its ancestor