当前位置:网站首页>[Sparse to Dense] Sparse to Dense: Depth Prediction from Sparse Depth samples and a Single Image
[Sparse to Dense] Sparse to Dense: Depth Prediction from Sparse Depth samples and a Single Image
2022-07-02 07:44:00 【Bryant Meng】
ICRA-2018
Catalogue des articles
1 Background and Motivation
Perception de la profondeur et estimation de la profondeur robotics, autonomous driving, augmented reality (AR) and 3D mapping Important dans l'application d'ingénierie égale !
Cependant, les méthodes actuelles d'estimation de la profondeur ont plus ou moins ses limites au moment de l'atterrissage. :
1)3D LiDARs are cost-prohibitive
2)Structured-light-based depth sensors (e.g. Kinect) are sunlight-sensitive and power-consuming
3)stereo cameras require a large baseline and careful calibration for accurate triangulation, and usually fails at featureless regions
Caméra monoculaire en raison de sa petite taille ,Faible coût,Économies d'énergie, Caractéristiques omniprésentes dans l'électronique grand public , La méthode d'estimation de la profondeur monoculaire est également devenue un point d'intérêt pour les chercheurs. !
Et pourtant,the accuracy and reliability of such methods is still far from being practical( Malgré une nette amélioration au fil des ans, )
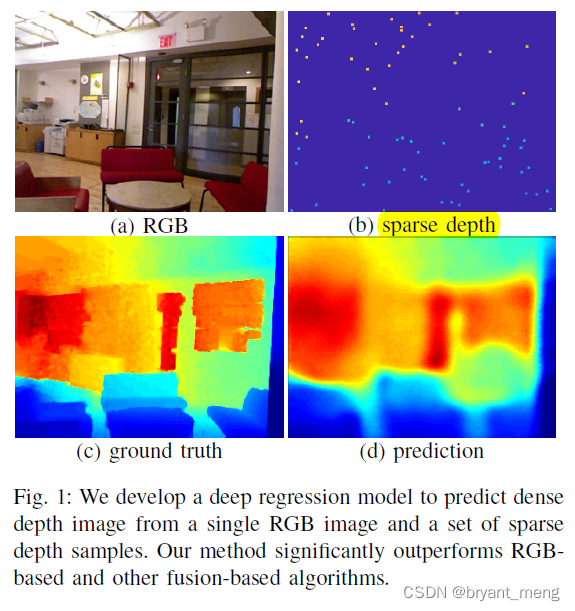
L'auteur est rgb Basé sur l'image ,Coopération sparse depth measurements, Pour estimer la profondeur ,a few sparse depth samples drastically improves depth reconstruction performance
2 Related Work
- RGB-based depth prediction
- hand-crafted features
- probabilistic graphical models
- Non-parametric approaches
- Semi-supervised learning
- unsupervised learning
- Depth reconstruction from sparse samples
- Sensor fusion
3 Advantages / Contributions
rgb + sparse depth Prévision de la profondeur monoculaire
ps: Il n'y a pas d'innovation dans la structure du réseau ,sparse depth Ce multimodal est aussi une référence aux idées des autres (Bien sûr., La méthode d'échantillonnage est différente )
4 Method
Structure globale
Ce qui est adopté est encoder Et decoder Forme
UpProj Le formulaire est le suivant::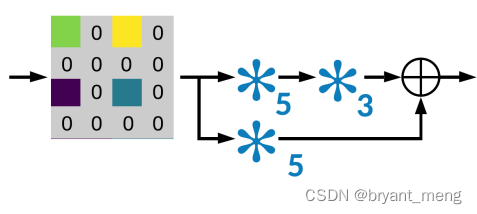
2)Depth Sampling
Selon Bernoulli probability Échantillonnage(eg:Lancer des pièces, Chaque résultat n'est pas pertinent ), p = m n p = \frac{m}{n} p=nm
Le test Bernoulli(Bernoulli experiment)Est répété dans les mêmes conditions、Un essai aléatoire effectué indépendamment les uns des autres,Il se caractérise par le fait que cet essai randomisé n'a que deux résultats possibles.:Se produit ou ne se produit pas.Nous supposons que l'essai a été répété indépendammentnUne fois,Donc cette série d'essais aléatoires répétés et indépendants estnTest Bernoulli lourd,Ou Bernoulli.

D ∗ D* D∗ Carte complète de la profondeur ,dense depth map
D D D sparse depth map
3)Data Augmentation
Scale / Rotation / Color Jitter / Color Normalization / Flips
scale Et rotation C'est comme si Nearest neighbor interpolation Pour éviter creating spurious sparse depth points
4)loss function
- l1
- l2:sensitive to outliers,over-smooth boundaries instead of sharp transitions
- berHu
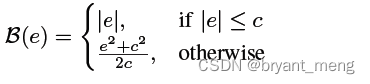
berHu Intégré l1 Et l2
Auteur”Les faits parlent.”Ce qui est adopté est l1
5 Experiments
5.1 Datasets
NYU-Depth-v2
464 different indoor scenes,249 Train + 215 test
the small labeled test dataset with 654 images is used for evaluating the final performance
KITTI Odometry Dataset
The KITTI dataset is more challenging for depth prediction, since the maximum distance is 100 meters as opposed to only 10 meters in the NYU-Depth-v2 dataset.
Indicateurs d'évaluation
RMSE: root mean squared error

REL: mean absolute relative error

δ i \delta_i δi:
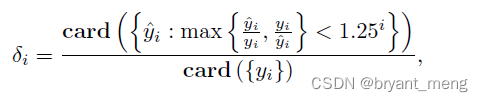
Parmi eux
- card:is the cardinality of a set( Peut être interprété simplement comme le comptage des éléments )
- y ^ \hat{y} y^:prediction
- y y y:GT
Référence à d'autres indicateurs d'évaluation pertinents Indice d'estimation de la profondeur monoculaire :SILog, SqRel, AbsRel, RMSE, RMSE(log)
5.2 RESULTS
1)Architecture Evaluation
DeConv3 Que DeConv2 D'accord.,
UpProj Que DeConv3 D'accord.(even larger receptive field of 4x4, the UpProj module outperforms the others)
2)Comparison with the State-of-the-Art
NYU-Depth-v2 Dataset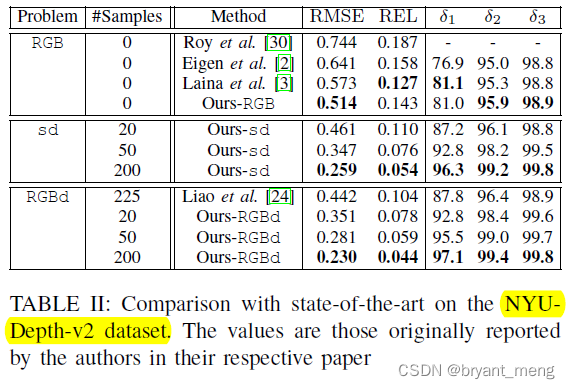
sd - Oui. sparse-depth Abréviation de, C'est - à - dire aucune entrée rgb
Voir les effets de la visualisation 
KITTI Dataset
3)On Number of Depth Samples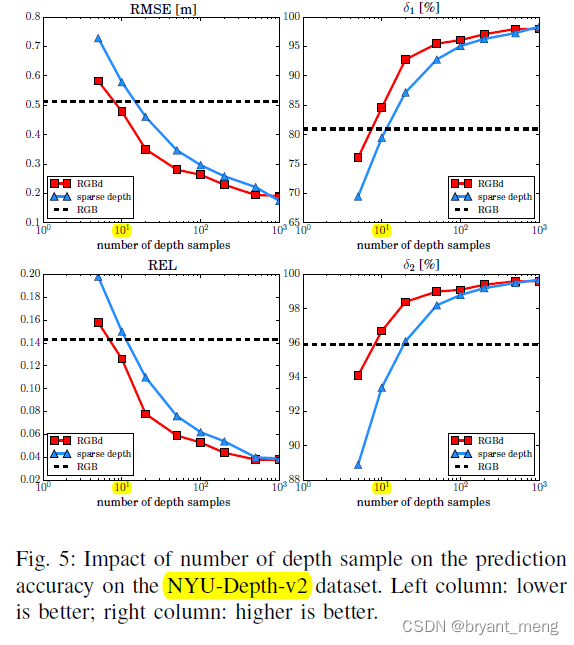
sparse 1 0 1 10^1 101 Cet ordre de grandeur correspond rgb Rivaliser, 1 0 2 10^2 102 Saut,
Plus d'échantillons,Et rgb Peu importe. (performance gap between RGBd and sd shrinks as the sample size increases),Ha ha ha
This observation indicates that the information extracted from the sparse sample set dominates the prediction when the sample size is sufficiently large, and in this case the color cue becomes almost irrelevant. (Échantillonnage complet, Je t'envoie ce que je veux. , Ne dis rien. rgb Peu importe., Ça n'a rien à voir avec les réseaux neuronaux. ,Ha ha ha)
Regarde encore. KITTI Impact sur 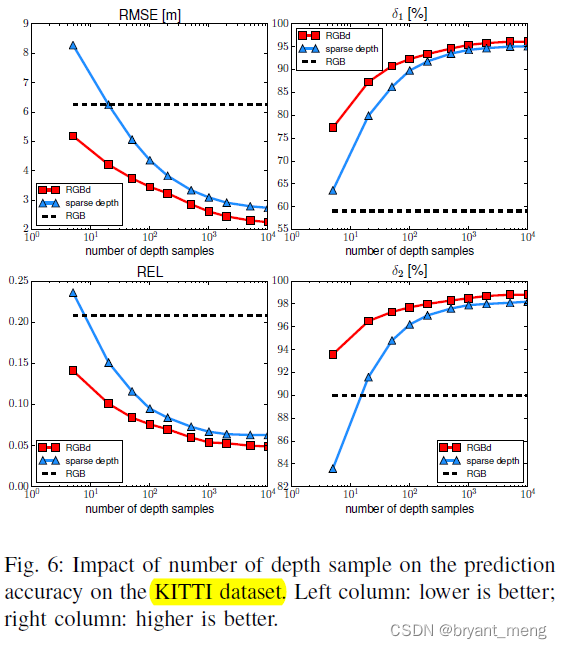
Similitudes et différences mineures
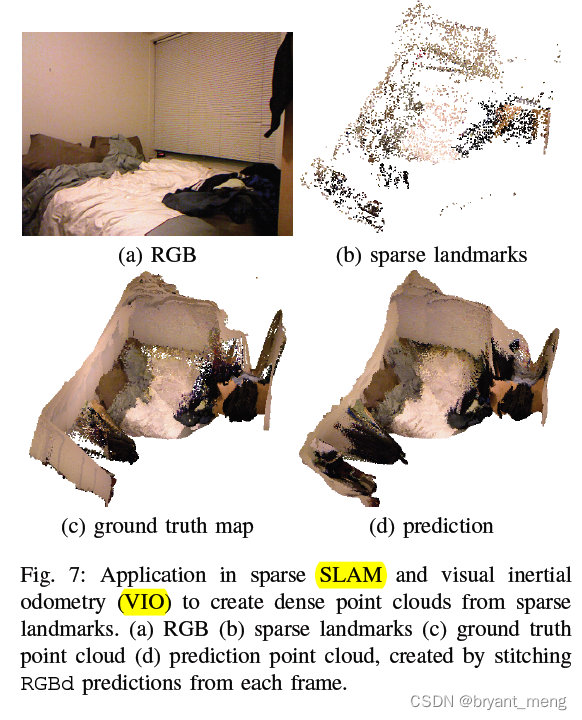
4)Application: Dense Map from Visual Odometry Features
5)Application: LiDAR Super-Resolution
6 Conclusion(own) / Future work
presentation
https://www.bilibili.com/video/av66343637/
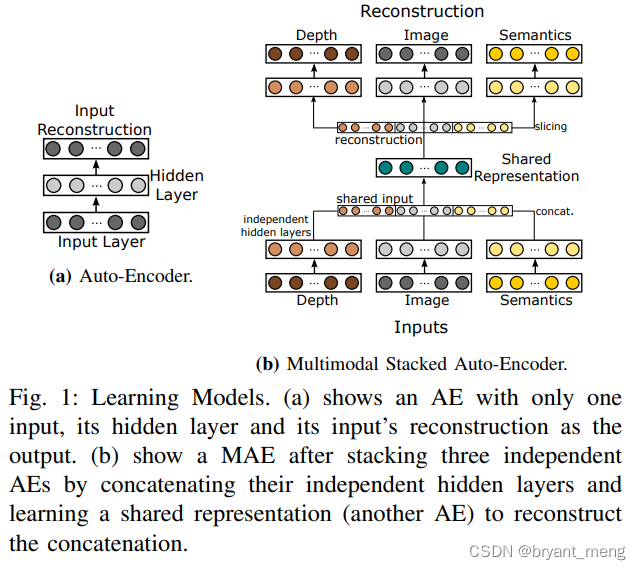
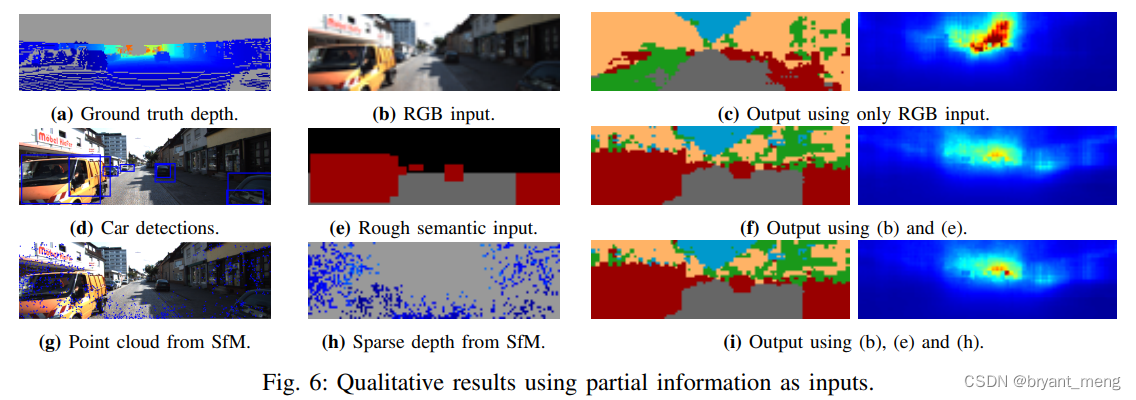
Voici quelques autres méthodes de prédiction de la profondeur monoculaire multimodale
《Multi-modal Auto-Encoders as Joint Estimators for Robotics Scene Understanding》
Robotics: Science and Systems-2016
《Parse Geometry from a Line: Monocular Depth Estimation with Partial Laser Observation》
ICRA-2017

J'ai l'impression que le coût d'atterrissage est plus faible que celui de l'auteur.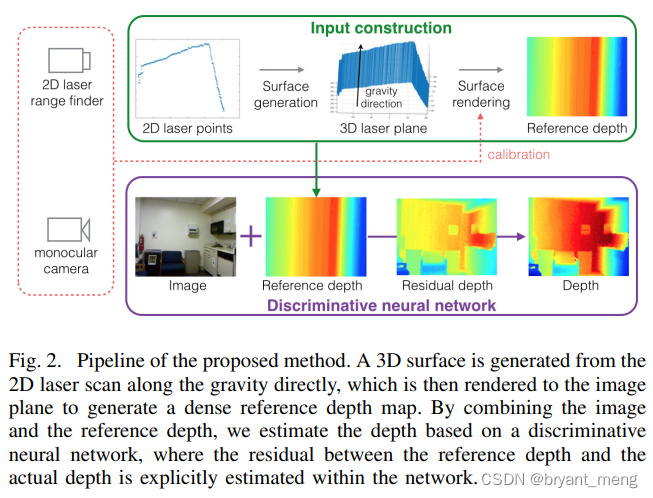

边栏推荐
- Machine learning theory learning: perceptron
- 【深度学习系列(八)】:Transoform原理及实战之原理篇
- Handwritten call, apply, bind
- Faster-ILOD、maskrcnn_ Benchmark installation process and problems encountered
- Ding Dong, here comes the redis om object mapping framework
- Typeerror in allenlp: object of type tensor is not JSON serializable error
- PHP returns the abbreviation of the month according to the numerical month
- Using compose to realize visible scrollbar
- SSM supermarket order management system
- 生成模型与判别模型的区别与理解
猜你喜欢
Semi supervised mixpatch

Traditional target detection notes 1__ Viola Jones

Timeout docking video generation

ModuleNotFoundError: No module named ‘pytest‘
![[paper introduction] r-drop: regulated dropout for neural networks](/img/09/4755e094b789b560c6b10323ebd5c1.png)
[paper introduction] r-drop: regulated dropout for neural networks
![[tricks] whiteningbert: an easy unsupervised sentence embedding approach](/img/8e/3460fed55f2a21f8178e7b6bf77d56.png)
[tricks] whiteningbert: an easy unsupervised sentence embedding approach

@Transitional step pit
半监督之mixmatch

Implementation of yolov5 single image detection based on pytorch
![[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video](/img/bc/c54f1f12867dc22592cadd5a43df60.png)
[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
随机推荐
Spark SQL task performance optimization (basic)
Ppt skills
常见的机器学习相关评价指标
Typeerror in allenlp: object of type tensor is not JSON serializable error
[introduction to information retrieval] Chapter II vocabulary dictionary and inverted record table
Win10+vs2017+denseflow compilation
传统目标检测笔记1__ Viola Jones
[Bert, gpt+kg research] collection of papers on the integration of Pretrain model with knowledge
【TCDCN】《Facial landmark detection by deep multi-task learning》
【BERT,GPT+KG调研】Pretrain model融合knowledge的论文集锦
@Transitional step pit
Faster-ILOD、maskrcnn_benchmark安装过程及遇到问题
Classloader and parental delegation mechanism
【Random Erasing】《Random Erasing Data Augmentation》
基于onnxruntime的YOLOv5单张图片检测实现
Mmdetection model fine tuning
【MEDICAL】Attend to Medical Ontologies: Content Selection for Clinical Abstractive Summarization
【Ranking】Pre-trained Language Model based Ranking in Baidu Search
[torch] the most concise logging User Guide
CPU的寄存器