当前位置:网站首页>STM32 CAN 介绍以及相关配置
STM32 CAN 介绍以及相关配置
2022-08-02 03:33:00 【@C#&】
STM32有两组CAN 控制器,CAN1是主设备,CAN2是从设备,存储访问控制器由CAN1控制,CAN2不能直接访问存储区域,所以使用CAN2的时候必须使能CAN1的外设时钟。
禁止收发任然可以访问FIFO里面的数据。
发送错误和接收错误的次数达到一定的值时,就会进入离线状态,在离线状态下,CAN是不能接收和发送报文的。
ABOM:自动离线管理
AWUM:发送报文时,总线会自动唤醒
NART:报文发送失败,会自动重传,直到成功为止
RFLM:锁定接收FIFO,锁定后,当接收FIFO溢出时,就会丢弃接收到的报文;不锁定,新的报文覆盖旧的报文
TXFP:报文优先级判定方法,当CAN外设中有多发送报文时,TXFP控制会根据报文的ID优先级挂还是报文存进邮箱的顺序来发送


CAN 初始化结构体
typedef struct
{
uint16_t CAN_Prescaler; /* 配置CAN 外设的时钟分频,可设置为1~1024 */
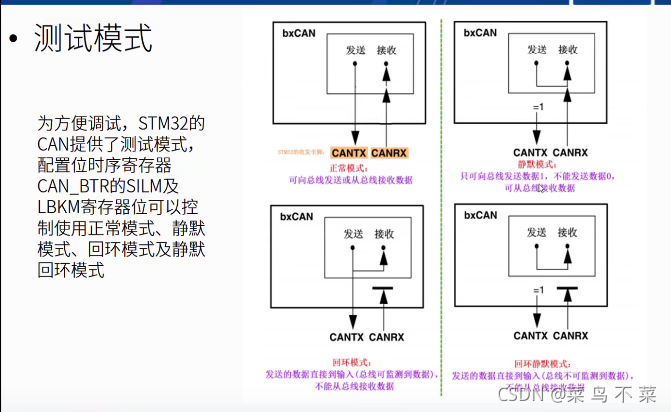
uint8_t CAN_Mode; /* 配置CAN 的工作模式,回环或正常模式 */
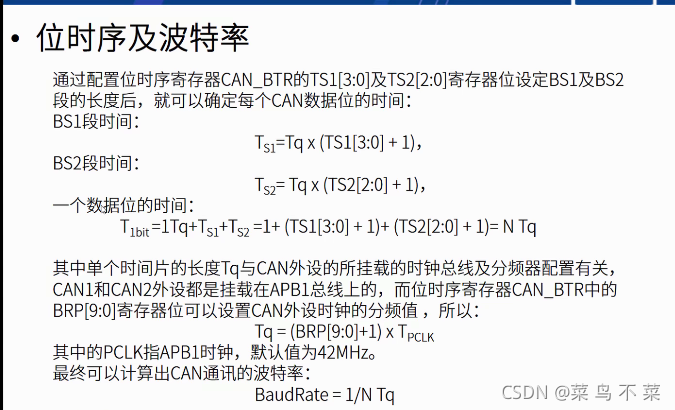
uint8_t CAN_SJW; /* 配置SJW 极限值, 可设置为1~4tq */
uint8_t CAN_BS1; /* 配置BS1段长度,可设置为1~16tq */
uint8_t CAN_BS2; /* 配置BS2段长度 ,可设置为1~8tq */
FunctionalState CAN_TTCM; /* 是否使能TTCM时间触发功能 */
FunctionalState CAN_ABOM; /* 是否使能ABOM 自动离线管理功能 */
FunctionalState CAN_AWUM; /* 是否使能 AWUM 自动唤醒功能 */
FunctionalState CAN_NART; /* 是否使能 NART 自动重传功能 */
FunctionalState CAN_RFLM; /* 是否使能 RFLM 锁定FIFO功能 */
FunctionalState CAN_TXFP; /* 配置TXFP 报文优先级的判定方法 */
} CAN_InitTypeDef;
CAN 发送结构体
typedef struct
{
uint32_t StdId; /* 存储报文的标准标识符11位,0~0x7FF. */
uint32_t ExtId; /* 存储报文的扩展标识符29位,0~0x1FFFFFFF */
uint8_t IDE; /* 存储IDE扩展标志*/
uint8_t RTR; /* 存储RTR远程帧标志 */
uint8_t DLC; /* 存储报文数据段的长度,0~8 */
uint8_t Data[8]; /* 存储报文数据段的内容 */
} CanTxMsg;
CAN 接收结构体
typedef struct
{
uint32_t StdId; /* 存储报文的标准标识符11位,0~0x7FF */
uint32_t ExtId; /* 存储报文的扩展标识符29位,0~0x1FFFFFFF */
uint8_t IDE; /* 存储IDE扩展标志 */
uint8_t RTR; /* 存储RTR远程帧标志 */
uint8_t DLC; /* 存储报文数据段的长度,0~8 */
uint8_t Data[8]; /* 存储报文数据段的内容 */
uint8_t FMI; /* 存储报文是由经过筛选器存储进 FIFO 的,0xFF*/
} CanRxMsg;
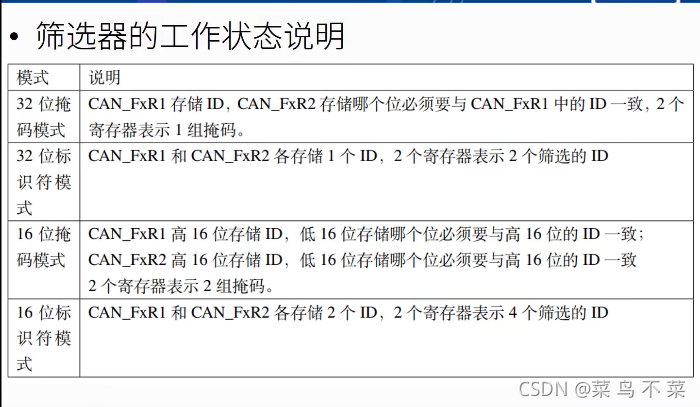
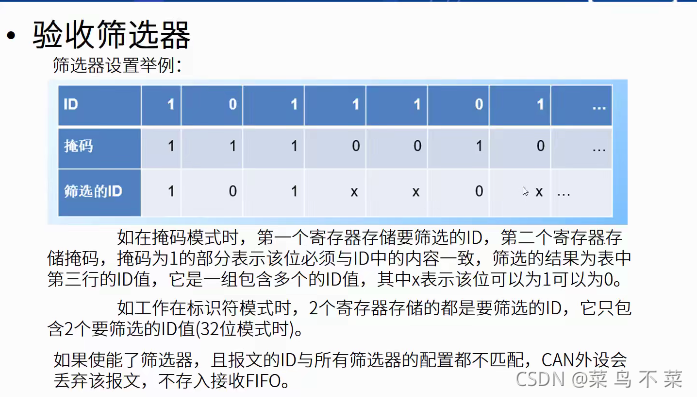
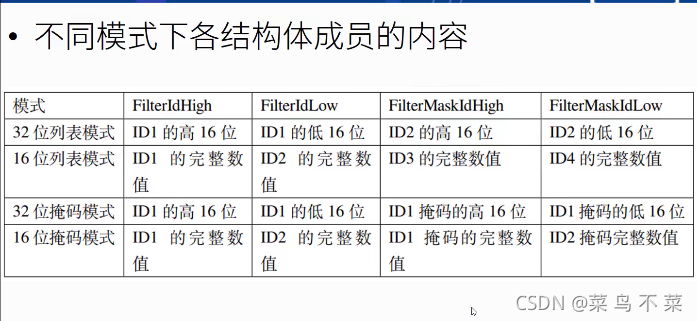
CAN 筛选器结构体
typedef struct
{
uint16_t CAN_FilterIdHigh; /* CAN_FxR1寄存的器的高16位 */
uint16_t CAN_FilterIdLow; /* CAN_FxR1寄存的器的低16位 */
uint16_t CAN_FilterMaskIdHigh; /* CAN_FxR2寄存的器的高16位 */
uint16_t CAN_FilterMaskIdLow; /* CAN_FxR2寄存的器的低16位 */
uint16_t CAN_FilterFIFOAssignment; /* 设置经过筛选后数据存储到哪个接收FIFO */
uint8_t CAN_FilterNumber; /* 筛选器编号,范围 0~27 */
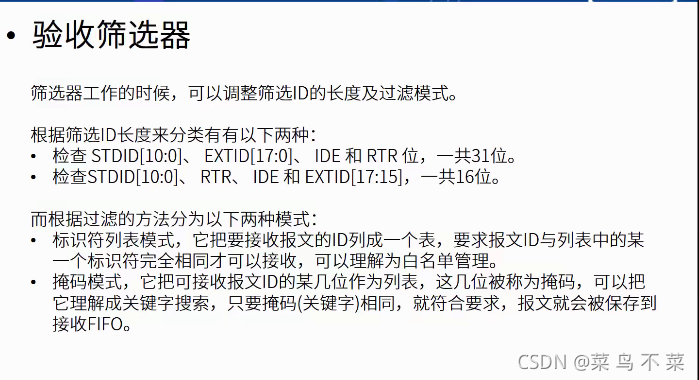
uint8_t CAN_FilterMode; /* 筛选器模式 */
uint8_t CAN_FilterScale; /* 设置筛选器的尺度 */
FunctionalState CAN_FilterActivation; /* 是否使能本筛选器 */
} CAN_FilterInitTypeDef;
下面是自己配置的CAN外设
void can1_mode_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100Hz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/************复用*******************/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource11, GPIO_AF_CAN1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource12, GPIO_AF_CAN1);
/************CAN总线的配置*******************/
CAN_InitStructure.CAN_TTCM = DISABLE; //时间触发通讯,1:使能,0:禁止
CAN_InitStructure.CAN_ABOM = ENABLE; //1:发生错误后,总线关闭,硬件自动恢复,0:由软件恢复
CAN_InitStructure.CAN_AWUM = ENABLE; //1:自动退出睡眠模式,0:由软件退出睡眠模式
CAN_InitStructure.CAN_NART = DISABLE; //1:不管成败只发送一次,0:发送失败会重发
CAN_InitStructure.CAN_RFLM = DISABLE; //1:保留最初的消息,0:覆盖旧消息更新最新消息
CAN_InitStructure.CAN_TXFP = DISABLE; //1:按发送请求顺序优先发送,0:按标识符优先发送
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
CAN_InitStructure.CAN_SJW = CAN_SJW_2tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_4tq; //Tbs1范围CAN_BS1_1tq ~ CAN_BS1_16tq
CAN_InitStructure.CAN_BS2 = CAN_BS2_2tq; //Tbs2范围CAN_BS2_1tq ~ CAN_BS2_8tq
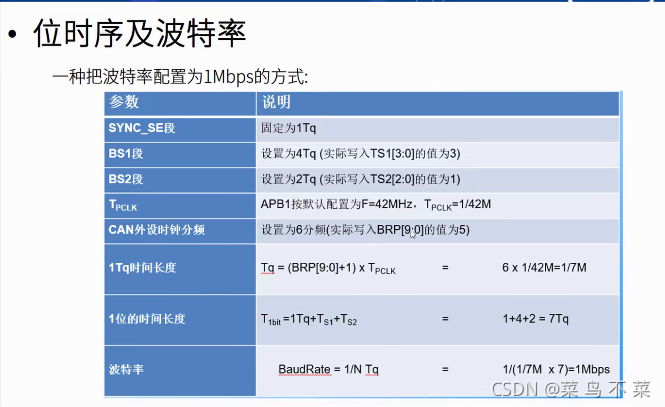
CAN_InitStructure.CAN_Prescaler = 6; //brp CAN BaudRate 42/(4+2+1)=1Mbps
CAN_Init(CAN1, &CAN_InitStructure);
/******CAN总线的过滤配置(接收配置)********/
CAN_FilterInitStructure.CAN_FilterNumber = 0;
CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;
CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;
CAN_FilterInit(&CAN_FilterInitStructure);
CAN_ITConfig(CAN1, CAN_IT_FMP0, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn; //中断配置
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级 0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
初次学习CAN,有错误的欢迎在下方评论区指正!
边栏推荐
猜你喜欢





随机推荐
The use and simulation of vector implementation:
【plang 1.4.3】定时器的使用
idea中创建jsp项目详细步骤
Personal image bed construction based on Alibaba Cloud OSS+PicGo
bluez5.50蓝牙文件传输
I2C无法访问ATEC508A加密芯片问题
所有子字符串中的元音 —— LeetCode - 2063
GM8775C MIPI转LVDS调试心得分享
Website development plan research
USB2.0一致性测试方法_高速示波器
Application of electronic flow on business trip
MPU6050 accelerometer and gyroscope sensor is connected with the Arduino
引擎开发日志:场景编辑器开发难点
PCB Design Ideas
写博客的原因。
单火线开关设计详解
USB_ID介绍
GM8284DD,GM8285C,GM8913,GM8914,GM8905C,GM8906C,国腾振芯LVDS类芯片
振芯科技GM8285C:功能TTL转LVDS芯片简介
Comparative analysis of OneNET Studio and IoT Studio