当前位置:网站首页>PSINS中19维组合导航模块sinsgps详解(初始赋值部分)
PSINS中19维组合导航模块sinsgps详解(初始赋值部分)
2022-07-06 19:13:00 【python小白(下阶段小黑)】
初始赋值部分
1.[nn, ts, nts] = nnts(2, diff(imu(1:2,end)));用于设置nn子样数、ts采样间隔以及前面两者相乘nts
2.if size(gps,2)<=5, gpspos_only=1; pos0=gps(1,1:3)'; else, gpspos_only=0; pos0=gps(1,4:6)'; end 判断传入的GPS数据是否有速度结果,只有位置的话,gpspos_only=1,还有速度的话,gpspos_only=0
3.
if ~exist('rk', 'var'),
if gpspos_only==1, rk=poserrset([10,30]);
else, rk=vperrset([0.1;0.3],[10,30]); end
end
上述代码块是用于给测量值赋初始方差的,只有位置观测值的话,只需要位置误差;还有速度观测值的话,那速度位置的方差都要设置;注意这里,位置误差的值输入的是米,速度误差的值单位是米每秒
4.
if ~exist('dT', 'var'), dT = 0.01; end; if length(dT)==1, dT(2,1)=1; end
if ~exist('lever', 'var'), lever = rep3(1); else, lever=rep3(lever); end; if length(lever)==3, lever(4)=1; end
if ~exist('imuerr', 'var'), imuerr = imuerrset(0.05, 500, 0.001, [10;10;100]); end
if ~exist('davp', 'var'), davp = avperrset([10;300], 1, [10;30]); end
if ~exist('ins', 'var'), ins=100; end
if ~isstruct(ins) % sinsgps(imu, gps, T); T=ins align time
[~, res0] = aligni0(imu(1:fix(ins/ts),:), pos0); imu(1:fix(ins/ts),:)=[];
ins = insinit([res0.attk(1,1:3)'; 0;0;0; pos0], ts); ins.nts=nts;
end
上述代码块是为没有提供的变量赋初值的:dT默认(0.01,1)s; lever默认[1;1;1]m;其他的如默认设置;
最重要的是ins默认为100,是用于后面判断是否要进行ins的初始化的
5. ins.lever = lever(1:3); ins.tDelay = dT(1);设置杆臂和时间延迟参数
6. ins = inslever(ins, -ins.lever); ins.vn = ins.vnL; ins.pos = ins.posL;对速度和位置进行杆臂误差的补偿
7. psinstypedef(196-gpspos_only*3);为组合导航维度类型做准备的
8.
kf = [];
kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(3,1); imuerr.sqg; imuerr.sqa; zeros(3,1); 0])^2;
上述代码块为系统噪声方差阵的构建。imuerr.web为角度随机游走;imuerr.wdb为速度随机游走; imuerr.sqg为角速率随机游走相关偏差;imuerr.sqa为比力随机游走相关偏差。
9.kf.Rk = diag(rk)^2;为设置测量噪声矩阵。
10. kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever(1:3)*lever(4); dT(1)*dT(2)]*1.0)^2; 为设置状态方差矩阵
11. kf.Hk = zeros(length(rk),19);为设置系数矩阵
12. kf = kfinit0(kf, nts);为卡尔曼滤波器初始化
13.
if exist('Pmin', 'var'),
if sum(Pmin)<=0, kf.pconstrain=0;
else kf.Pmin = Pmin; kf.pconstrain = 1; end
end
kf.adaptive = 1;
if exist('Rmin', 'var'),
if sum(Rmin)<=0, kf.adaptive=0; end
if kf.adaptive==1,
if length(Rmin)==1, kf.Rmin = kf.Rk*Rmin;
else kf.Rmin = diag(Rmin); end
end
end
上述代码为设置限制状态方差下限以及自适应滤波的测量噪声矩阵下限设置
14.
if exist('fbstr', 'var'), kf.fbstr=fbstr; end
kf.xtau = [ [1;1;1]; [1;1;1]; [1;1;1]; [1;1;1]; [1;1;1]; [1;1;1]; 1]*1;
上述代码为设置相关参数
时间同步初始化部分
imugpssyn(imu(:,end), gps(:,end));时间同步部分会在下一篇详细介绍
边栏推荐
- AWS learning notes (I)
- Number theory --- fast power, fast power inverse element
- Leetcode:minimum_depth_of_binary_tree解决问题的方法
- QT common Concepts-1
- Compress JS code with terser
- Here comes a white paper to uncover the technology behind Clickhouse, a node with 10000 bytes!
- 所谓的消费互联网仅仅只是做行业信息的撮合和对接,并不改变产业本身
- Douban average 9 x. Five God books in the distributed field!
- C#/VB. Net to delete watermarks in word documents
- 一文读懂Faster RCNN
猜你喜欢
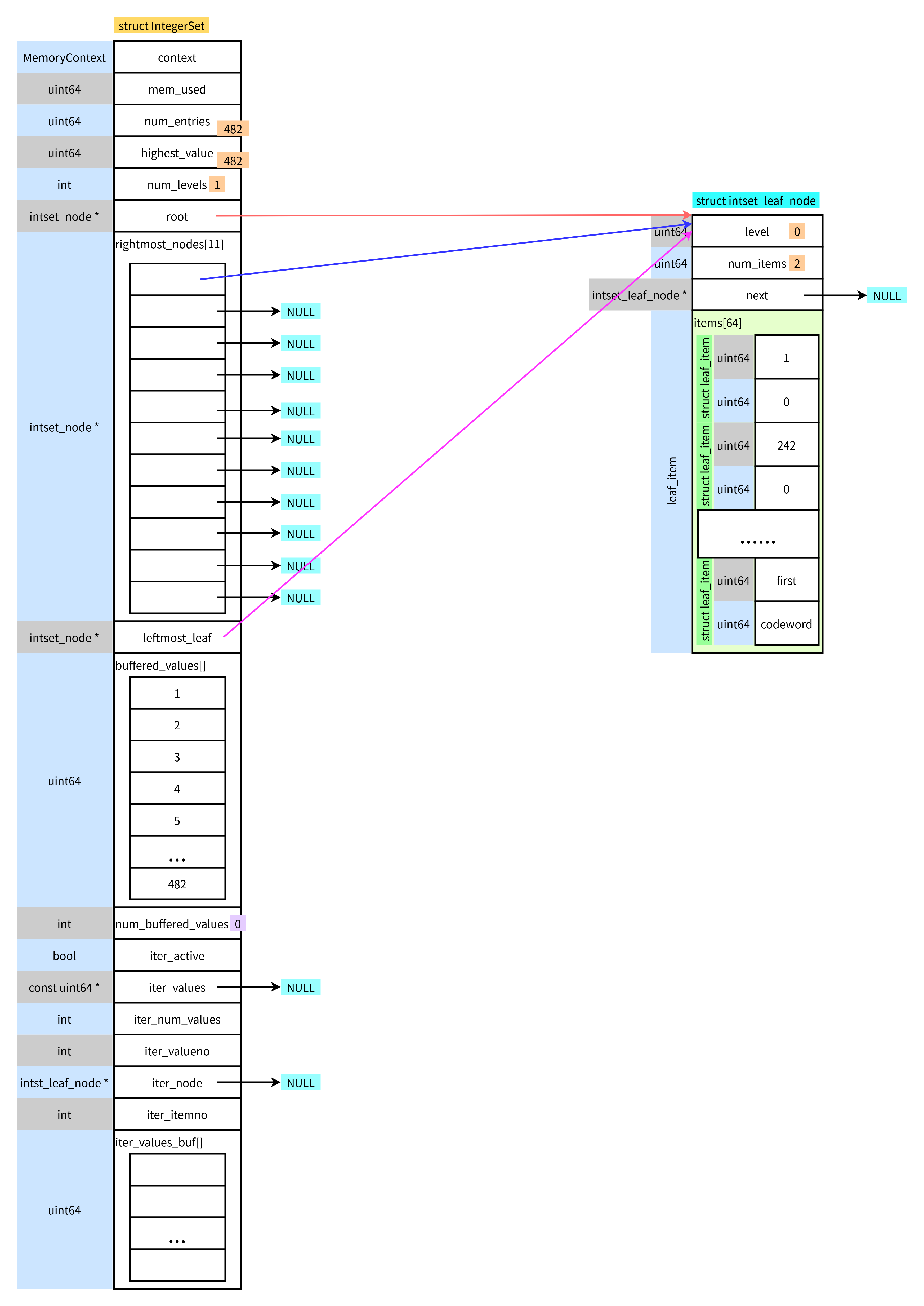
Integerset of PostgreSQL
Django database (SQLite) basic introductory tutorial
Ali yunyili: how does yunyuansheng solve the problem of reducing costs and improving efficiency?
Statistics of radar data in nuscenes data set
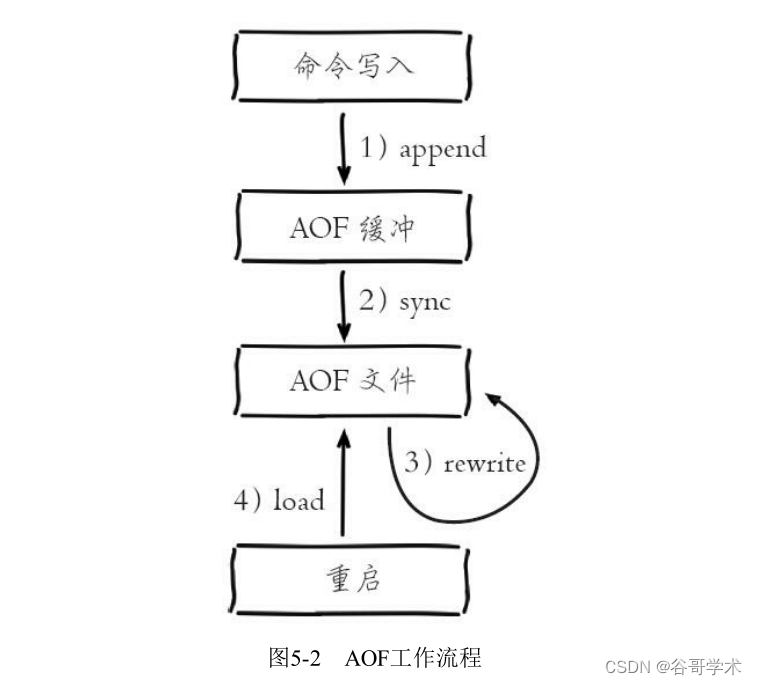
Redis入门完整教程:AOF持久化

How to design interface test cases? Teach you a few tips to draft easily
Apifox, is your API interface document rolled up like this?

S120驱动器基本调试步骤总结

1--新唐nuc980 NUC980移植 UBOOT,从外部mx25l启动
【Socket】①Socket技术概述
随机推荐
Cloud Mail .NET Edition
从零安装Redis
Untiy文本框的代码换行问题
6-6 vulnerability exploitation SSH security defense
B站6月榜单丨飞瓜数据UP主成长排行榜(哔哩哔哩平台)发布!
CDB PDB 用户权限管理
安全交付工程师
The so-called consumer Internet only matches and connects industry information, and does not change the industry itself
你不可不知道的Selenium 8种元素定位方法,简单且实用
【Node学习笔记】chokidar模块实现文件监听
Digital scrolling increases effect
Software testing -- common assertions of JMeter interface testing
AWS学习笔记(一)
Work of safety inspection
Unity custom webgl packaging template
Ali yunyili: how does yunyuansheng solve the problem of reducing costs and improving efficiency?
Electrical engineering and automation
[software test] the most complete interview questions and answers. I'm familiar with the full text. If I don't win the offer, I'll lose
6-6漏洞利用-SSH安全防御
Matlb| economic scheduling with energy storage, opportunity constraints and robust optimization