当前位置:网站首页>RB technology stack
RB technology stack
2022-07-05 00:48:00 【Martin Luther Silver】
SLAM( Synchronous positioning and map building ), It refers to the moving object according to the information of the sensor , While calculating your position , While building the environment map , Solve the problem of localization and map construction when robots move in unknown environment . at present ,SLAM It is mainly used in robots 、 Unmanned aerial vehicle (uav) 、 unmanned 、AR、VR Other fields . Its uses include the positioning of the sensor itself , And subsequent path planning 、 Athletic performance 、 Scene understanding .
actually ,SLAM The algorithm itself only completes the robot positioning and map building , It is not completely equivalent to what we call navigation and positioning . The navigation here , It's actually SLAM What algorithms can't do . It's called sports planning in the industry (Motion Planning).
Let's talk about motion planning for wheeled robots like sweepers . The basic capability required here is path planning , That is to say, it's usually finished SLAM after , There's a capability called target point navigation . Popular said , It's planning a way to get from A Point to B Point out the path , Then let the robot move past .
To achieve this process , Motion planning should realize at least two levels of modules , One is called global planning , This is a little bit like our car navigator , It needs to plan a route in advance on the map , Also have the current robot position . It's up to us SLAM The system provides . It is commonly used in the industry as A* To implement this process , It's a heuristic search algorithm , Excellent . Its most popular application is in games , Like Starcraft 、 Real time strategy games like Warcraft , They all use this algorithm to calculate the trajectory of a unit .
Of course , Just planning the path is not enough , There will be a lot of emergencies in reality , For example, a child happens to be in the way , We need to adjust the original path . Of course , Sometimes this adjustment doesn't need to recalculate the global path , The robot might just make a little detour . here , We need another level of planning module , It's called local planning . It may not know where the robot is going in the end , But it's especially good at how robots get around obstacles in front of them .
Global path planning belongs to static planning , Local path planning belongs to dynamic planning . Global path planning needs to master all environmental information , Carry out path planning according to all the information of the environment map ; Local path planning only needs real-time environmental information collected by sensors , Learn about environmental map information , Then determine the location of the map and the distribution of local obstacles , Thus, the optimal path from the current node to a sub target node can be selected .
In the global path planning algorithm , It can be roughly divided into three categories : Traditional algorithms (Dijkstra Algorithm 、A* Algorithm etc. )、 Intelligent algorithm (PSO Algorithm 、 Genetic algorithm (ga) 、 Strengthen learning, etc )、 Traditional and intelligent algorithms .
Mobile robots
The general direction of robot algorithm can be divided into perception algorithm and control algorithm , Perception algorithm is generally environment perception 、 Path planning , The control algorithm is generally divided into decision algorithm 、 Motion control algorithm .
Perception algorithm
slam
Path planning algorithm
A* Algorithm ,RTT Algorithm ,Dijkstra Algorithm
Motion control algorithm
pid Control algorithm ,LQR,ADRC
Decision-making algorithm
Behavior decision algorithm or behavior control strategy is the research and development focus of the robot application field ( There are different algorithms in different application fields , Of course , It can also be completely manually controlled by people , What we often call artificial intelligence , In a narrow sense, it refers to this module ), This does not mean those simple behavioral algorithms , For example, repeat actions , The robot dances in a fixed motion , Walking without obstacles or fixed obstacle routes , These are mainly hard coded , Not involved ai, Complex behavioral decision-making algorithms mainly include fsm, Analytic hierarchy process , Decision tree , The fuzzy logic , Genetic algorithm (ga) ga, Artificial neural network ann, And specific algorithms for specific problems , Such as path planning
Mechanical arm
The motion planning of the manipulator is still different from that of the mobile robot . In the motion planning of mobile robots , Robots often use a 【 spot 】 There is , Planning for mobile robots , More is to use a variety of search algorithms , On the already built map model , Search out a path curve from the starting point to the ending point . The motion planning of the manipulator is the motion of multiple rigid bodies . When considering its motion planning , Multiple rigid bodies need to be considered at the same time ( Or joints ) The movement of , therefore , How to represent multiple rigid bodies at the same time ( Or joints ) Sports become more important .
边栏推荐
- Reasons and solutions of redis cache penetration and avalanche
- GDB common commands
- He worked as a foreign lead and paid off all the housing loans in a year
- College degree, what about 33 year old Baoma? I still sell and test, and my monthly income is 13K+
- [selenium automation] common notes
- Insert sort of sort
- 107. SAP UI5 OverflowToolbar 容器控件以及 resize 事件处理的一些细节介绍
- TS快速入门-函数
- [Yocto RM]11 - Features
- abc 258 G - Triangle(bitset)
猜你喜欢

JS how to realize array to tree
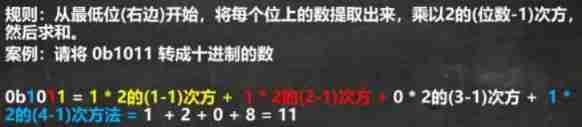
Binary conversion problem
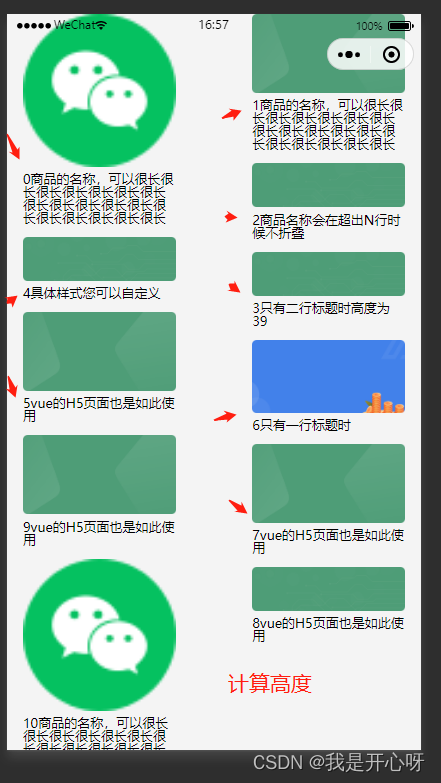
uniapp微信小程序拿来即用的瀑布流布局demo2(方法二)(复制粘贴即可使用,无需做其他处理)
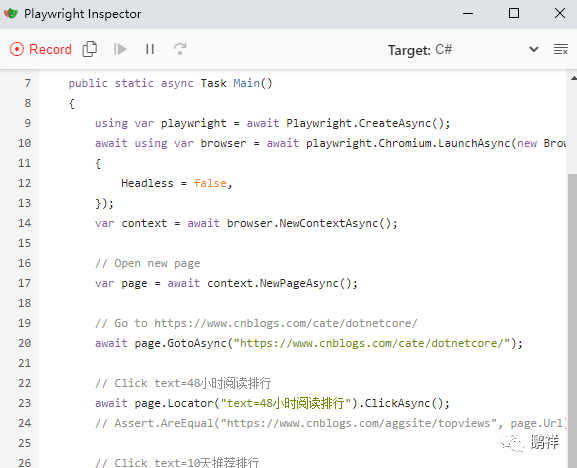
Playwright之录制
![[paper reading] Tun det: a novel network for meridian ultra sound nodule detection](/img/25/e2366cabf00e55664d16455a6049e0.png)
[paper reading] Tun det: a novel network for meridian ultra sound nodule detection
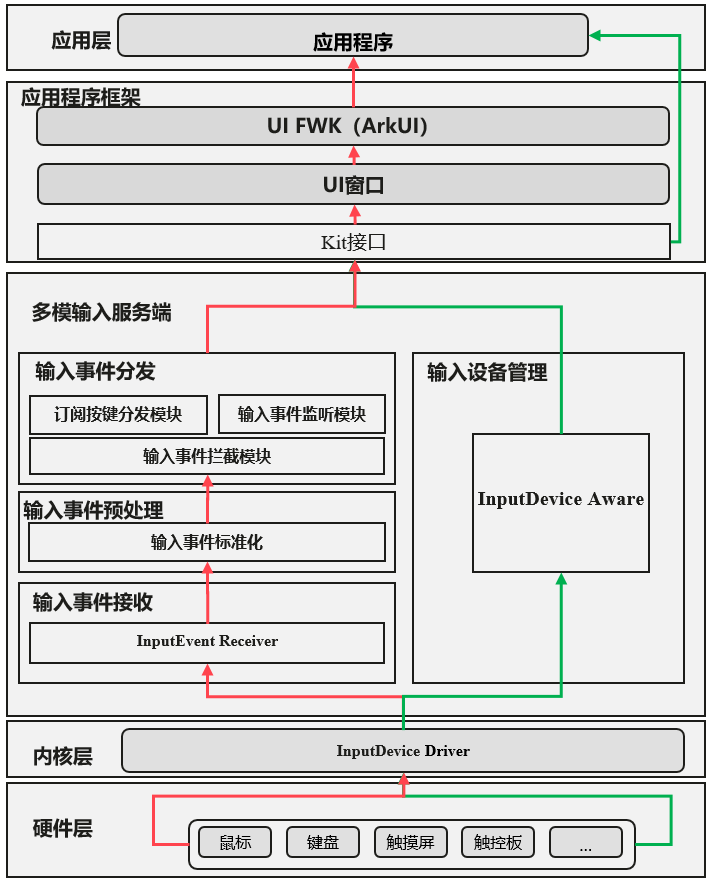
多模输入事件分发机制详解

Parsing of XML

Verilog tutorial (11) initial block in Verilog
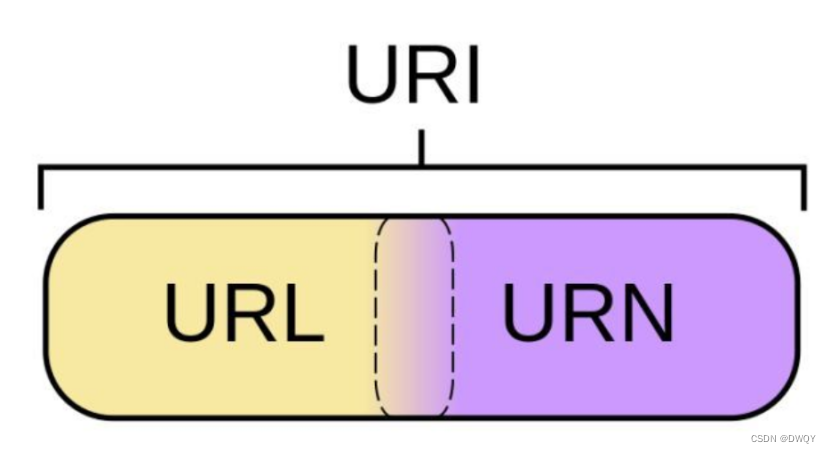
URLs and URIs
Deux nombres se remplacent
随机推荐
js如何实现数组转树
揭露测试外包公司,关于外包,你或许听到过这样的声音
多模输入事件分发机制详解
Actual combat simulation │ JWT login authentication
人生无常,大肠包小肠, 这次真的可以回家看媳妇去了。。。
[paper reading] cavemix: a simple data augmentation method for brain vision segmentation
Applet live + e-commerce, if you want to be a new retail e-commerce, use it!
Basic concept and usage of redis
[paper reading] Tun det: a novel network for meridian ultra sound nodule detection
Acwing164. Accessibility Statistics (topological sorting +bitset)
创新引领方向 华为智慧生活全场景新品齐发
【报错】 “TypeError: Cannot read properties of undefined (reading ‘split‘)“
Mongodb series learning notes tutorial summary
Leetcode70 (Advanced), 322
2022.07.03 (lc_6111_counts the number of ways to place houses)
2022.07.03(LC_6108_解密消息)
实战模拟│JWT 登录认证
Getting started with Paxos
Huawei employs data management experts with an annual salary of 2million! The 100 billion market behind it deserves attention
2022.07.03(LC_6111_统计放置房子的方式数)