当前位置:网站首页>[filter tracking] strapdown inertial navigation pure inertial navigation solution matlab implementation
[filter tracking] strapdown inertial navigation pure inertial navigation solution matlab implementation
2022-07-07 11:50:00 【Matlab scientific research studio】
1 brief introduction
Strapdown navigation system is a kind of inertial navigation system , Compared with platform navigation system, it has small volume 、 Light weight 、 Low cost features , It is the development direction of inertial navigation system in the future . This paper first introduces the strapdown inertial navigation system (SINS) The principle of navigation , The algorithm of initial alignment and navigation solution of strapdown inertial navigation system is discussed 、 Flight path data generation algorithm , And then use it MATLAB/Simulink Simulation software , The navigation process of strapdown inertial navigation system is simulated . As the error of navigation parameters of inertial navigation system accumulates with time , Pure strapdown inertial navigation system can not meet the long-term 、 Long distance navigation requirements . It is often used in practice GPS/SINS Integrated navigation technology to improve the accuracy and reliability of the system , In this paper, Kalman filter method is used to simulate it . The experimental results show that the simulation system works stably and reliably , The simulation result achieves the expected effect . Initial alignment is one of the key technologies of strapdown inertial navigation system , It directly affects the navigation performance of strapdown inertial navigation system . Considering the low accuracy of strapdown inertial navigation system , Its gyro accuracy is low , The estimation accuracy of azimuth misalignment angle during initial alignment is often not high ; in addition , The common method of initial alignment is to use Kalman filter technology , But in practice , Its robustness is not high , Therefore, there is an urgent need for an initial alignment method that can improve the estimation accuracy of azimuth misalignment angle of low precision strapdown inertial navigation system and has robustness .
2 Part of the code
function [Cbn]=QuaternionToDCM(qbn)% Attitude quaternion direction cosine matrixCbn(1,1)=qbn(1)*qbn(1)+qbn(2)*qbn(2)-qbn(3)*qbn(3)-qbn(4)*qbn(4);Cbn(1,2)=2*(qbn(2)*qbn(3)-qbn(1)*qbn(4));Cbn(1,3)=2*(qbn(2)*qbn(4)+qbn(1)*qbn(3));Cbn(2,1)=2*(qbn(2)*qbn(3)+qbn(1)*qbn(4));Cbn(2,2)=qbn(1)*qbn(1)-qbn(2)*qbn(2)+qbn(3)*qbn(3)-qbn(4)*qbn(4);Cbn(2,3)=2*(qbn(3)*qbn(4)-qbn(1)*qbn(2));Cbn(3,1)=2*(qbn(2)*qbn(4)-qbn(1)*qbn(3));Cbn(3,2)=2*(qbn(3)*qbn(4)+qbn(1)*qbn(2));Cbn(3,3)=qbn(1)*qbn(1)-qbn(2)*qbn(2)-qbn(3)*qbn(3)+qbn(4)*qbn(4);end
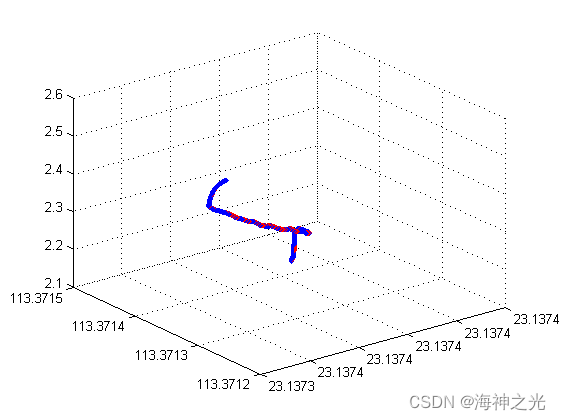
3 Simulation results

4 reference
[1] Zhang Yan . Algorithm research and Simulation Implementation of strapdown inertial navigation system . Diss. Dalian University of Technology , 2008.
About bloggers : Good at intelligent optimization algorithms 、 Neural networks predict 、 signal processing 、 Cellular automata 、 The image processing 、 Path planning 、 UAV and other fields Matlab Simulation , relevant matlab Code problems can be exchanged by private letter .
Some theories cite network literature , If there is infringement, contact the blogger to delete .
边栏推荐
- 竟然有一半的人不知道 for 与 foreach 的区别???
- 【纹理特征提取】基于matlab局部二值模式LBP图像纹理特征提取【含Matlab源码 1931期】
- 5V串口接3.3V单片机串口怎么搞?
- How to write test cases for test coupons?
- Electron adding SQLite database
- In my limited software testing experience, a full-time summary of automation testing experience
- 清华姚班程序员,网上征婚被骂?
- Explore cloud database of cloud services together
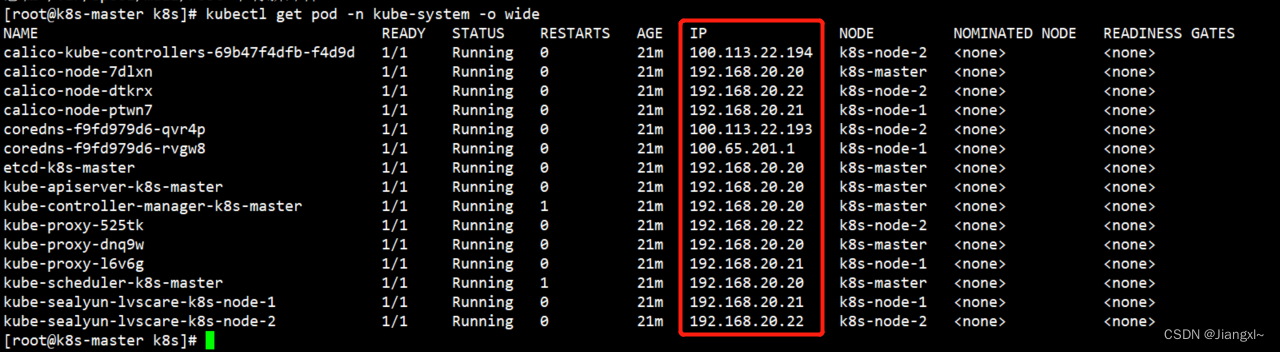
- The running kubernetes cluster wants to adjust the network segment address of pod
- Test the foundation of development, and teach you to prepare for a fully functional web platform environment
猜你喜欢
STM32F1与STM32CubeIDE编程实例-MAX7219驱动8位7段数码管(基于SPI)
Le Cluster kubernets en cours d'exécution veut ajuster l'adresse du segment réseau du pod
【滤波跟踪】基于matlab捷联惯导仿真【含Matlab源码 1935期】
![[texture feature extraction] LBP image texture feature extraction based on MATLAB local binary mode [including Matlab source code 1931]](/img/65/bf1d0f82878a49041e8c2b3a84bc15.png)
[texture feature extraction] LBP image texture feature extraction based on MATLAB local binary mode [including Matlab source code 1931]

. Net Maui performance improvement

《通信软件开发与应用》课程结业报告
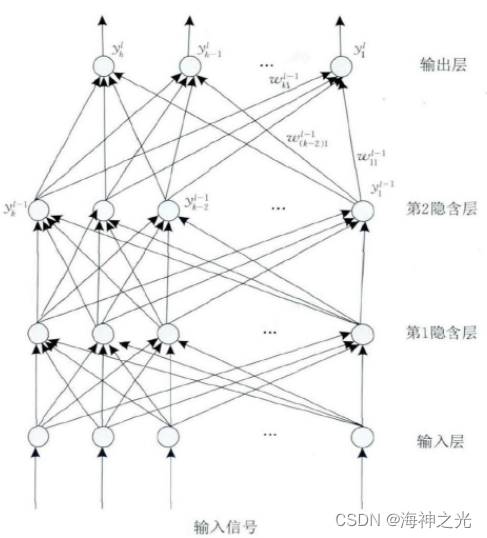
【神经网络】卷积神经网络CNN【含Matlab源码 1932期】
Cmu15445 (fall 2019) project 2 - hash table details
The running kubernetes cluster wants to adjust the network segment address of pod
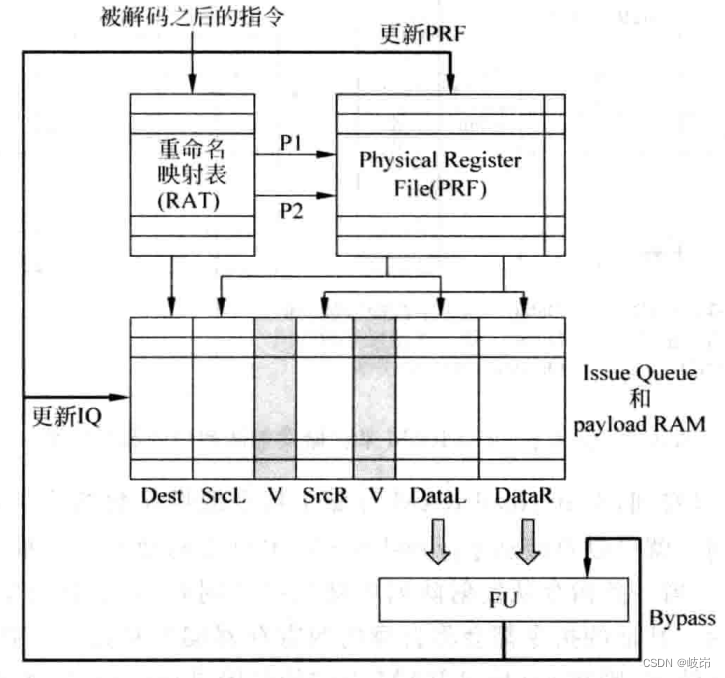
超标量处理器设计 姚永斌 第8章 指令发射 摘录
随机推荐
一度辍学的数学差生,获得今年菲尔兹奖
Various uses of vim are very practical. I learned and summarized them in my work
Leetcode - interview question 17.24 maximum submatrix
【愚公系列】2022年7月 Go教学课程 005-变量
SwiftUI Swift 内功之如何在 Swift 中进行自动三角函数计算
R Language Using Image of magick package Mosaic Function and Image La fonction flatten empile plusieurs images ensemble pour former des couches empilées sur chaque autre
Swiftui tutorial how to realize automatic scrolling function in 2 seconds
【滤波跟踪】捷联惯导纯惯导解算matlab实现
相机标定(1): 单目相机标定及张正友标定基本原理
【最短路】ACwing 1127. 香甜的黄油(堆优化的dijsktra或spfa)
[shortest circuit] acwing 1127 Sweet butter (heap optimized dijsktra or SPFA)
[filter tracking] comparison between EKF and UKF based on MATLAB extended Kalman filter [including Matlab source code 1933]
博客搬家到知乎
Explore cloud database of cloud services together
清华姚班程序员,网上征婚被骂?
核舟记(一):当“男妈妈”走进现实,生物科技革命能解放女性吗?
There are ways to improve self-discipline and self-control
正在運行的Kubernetes集群想要調整Pod的網段地址
Mastering the new functions of swiftui 4 weatherkit and swift charts
千人規模互聯網公司研發效能成功之路