当前位置:网站首页>Mujoco produces analog video
Mujoco produces analog video
2022-07-07 00:28:00 【Feisy】
This code sample simulates the passive dynamics of a given model, renders it offscreen, reads the color and depth pixel values, and saves them into a raw data file that can then be converted into a movie file with tools such as ffmpeg. The rendering is simplified compared to simulate.cc because there is no user interaction, visualization options or timing; instead we simply render with the default settings as fast as possible. The dimensions and number of multi-samples for the offscreen buffer are specified in the MuJoCo model, while the simulation duration, frames-per-second to be rendered (usually much less than the physics simulation rate), and output file name are specified as command-line arguments. For example, a 5 second animation at 60 frames per second is created with:
render humanoid.xml 5 60 rgb.out
The default humanoid.xml model specifies offscreen rendering with 800x800 resolution. With this information in hand, we can compress the (large) raw date file into a playable movie file:
ffmpeg -f rawvideo -pixel_format rgb24 -video_size 800x800
-framerate 60 -i rgb.out -vf "vflip" video.mp4
But I failed several times , Find out ffmpeg There are size requirements inside , We will
Make a size setting for the model :
<visual>
<map force="0.1" zfar="30"/>
<rgba haze="0.15 0.25 0.35 1"/>
<quality shadowsize="4096"/>
<global offwidth="800" offheight="800"/>
</visual>
In this way, the video is successfully produced
take record.cc The problem of compiling to your own project
For the moment , I can't embed the recording function directly into the project , Feel the recording function
Eat resources very much , And when recording OPENGL To do it , The test found that it would follow mujoco Of UI
A little conflict , Lead to mujoco Of UI No display .
Possible problems
Use Mujoco Self contained record.cc Just change it
But be careful , use g++ compile , If you use gcc compile ,
May report cstdio Can't find such a mistake .
in addition , The file name cannot be too long , Otherwise std::fopen It won't open
record.cc Useful to mujoco Of array_safe.h, This is the source code , It can be copied directly
Into your own project
Example : The test can pass
Mujoco Record analog video
// Copyright 2021 DeepMind Technologies Limited
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <cstdio>
#include <cstdlib>
#include <cstring>
#include "mujoco.h"
// select EGL, OSMESA or GLFW
#if defined(MJ_EGL)
#include <EGL/egl.h>
#elif defined(MJ_OSMESA)
#include <GL/osmesa.h>
OSMesaContext ctx;
unsigned char buffer[10000000];
#else
#include <GLFW/glfw3.h>
#endif
#include "array_safety.h"
namespace mju = ::mujoco::sample_util;
//-------------------------------- global data ------------------------------------------
char xmlpath[] = "./dbpendulum/doublependulum.xml";
char rgb_file[] = "./rgb.out";
// MuJoCo model and data
mjModel* m = 0;
mjData* d = 0;
// MuJoCo visualization
mjvScene scn;
mjvCamera cam;
mjvOption opt;
mjrContext con;
//-------------------------------- utility functions ------------------------------------
// load model, init simulation and rendering
void initMuJoCo(const char* filename) {
// load and compile
char error[1000] = "Could not load binary model";
if (std::strlen(filename)>4 && !std::strcmp(filename+std::strlen(filename)-4, ".mjb")) {
m = mj_loadModel(filename, 0);
} else {
m = mj_loadXML(filename, 0, error, 1000);
}
if (!m) {
mju_error_s("Load model error: %s", error);
}
// make data, run one computation to initialize all fields
d = mj_makeData(m);
mj_forward(m, d);
// initialize visualization data structures
mjv_defaultCamera(&cam);
mjv_defaultOption(&opt);
mjv_defaultScene(&scn);
mjr_defaultContext(&con);
// create scene and context
mjv_makeScene(m, &scn, 2000);
mjr_makeContext(m, &con, 200);
// center and scale view
double arr_view[] = {
89.608063, -11.588379, 5, 0.000000, 0.000000, 2.000000};
cam.azimuth = arr_view[0];
cam.elevation = arr_view[1];
cam.distance = arr_view[2];
cam.lookat[0] = arr_view[3];
cam.lookat[1] = arr_view[4];
cam.lookat[2] = arr_view[5];
}
// deallocate everything
void closeMuJoCo(void) {
mj_deleteData(d);
mj_deleteModel(m);
mjr_freeContext(&con);
mjv_freeScene(&scn);
}
// create OpenGL context/window
void initOpenGL(void) {
//------------------------ EGL
#if defined(MJ_EGL)
// desired config
const EGLint configAttribs[] = {
EGL_RED_SIZE, 8,
EGL_GREEN_SIZE, 8,
EGL_BLUE_SIZE, 8,
EGL_ALPHA_SIZE, 8,
EGL_DEPTH_SIZE, 24,
EGL_STENCIL_SIZE, 8,
EGL_COLOR_BUFFER_TYPE, EGL_RGB_BUFFER,
EGL_SURFACE_TYPE, EGL_PBUFFER_BIT,
EGL_RENDERABLE_TYPE, EGL_OPENGL_BIT,
EGL_NONE
};
// get default display
EGLDisplay eglDpy = eglGetDisplay(EGL_DEFAULT_DISPLAY);
if (eglDpy==EGL_NO_DISPLAY) {
mju_error_i("Could not get EGL display, error 0x%x\n", eglGetError());
}
// initialize
EGLint major, minor;
if (eglInitialize(eglDpy, &major, &minor)!=EGL_TRUE) {
mju_error_i("Could not initialize EGL, error 0x%x\n", eglGetError());
}
// choose config
EGLint numConfigs;
EGLConfig eglCfg;
if (eglChooseConfig(eglDpy, configAttribs, &eglCfg, 1, &numConfigs)!=EGL_TRUE) {
mju_error_i("Could not choose EGL config, error 0x%x\n", eglGetError());
}
// bind OpenGL API
if (eglBindAPI(EGL_OPENGL_API)!=EGL_TRUE) {
mju_error_i("Could not bind EGL OpenGL API, error 0x%x\n", eglGetError());
}
// create context
EGLContext eglCtx = eglCreateContext(eglDpy, eglCfg, EGL_NO_CONTEXT, NULL);
if (eglCtx==EGL_NO_CONTEXT) {
mju_error_i("Could not create EGL context, error 0x%x\n", eglGetError());
}
// make context current, no surface (let OpenGL handle FBO)
if (eglMakeCurrent(eglDpy, EGL_NO_SURFACE, EGL_NO_SURFACE, eglCtx)!=EGL_TRUE) {
mju_error_i("Could not make EGL context current, error 0x%x\n", eglGetError());
}
//------------------------ OSMESA
#elif defined(MJ_OSMESA)
// create context
ctx = OSMesaCreateContextExt(GL_RGBA, 24, 8, 8, 0);
if (!ctx) {
mju_error("OSMesa context creation failed");
}
// make current
if (!OSMesaMakeCurrent(ctx, buffer, GL_UNSIGNED_BYTE, 800, 800)) {
mju_error("OSMesa make current failed");
}
//------------------------ GLFW
#else
// init GLFW
if (!glfwInit()) {
mju_error("Could not initialize GLFW");
}
// create invisible window, single-buffered
glfwWindowHint(GLFW_VISIBLE, 0);
glfwWindowHint(GLFW_DOUBLEBUFFER, GLFW_FALSE);
GLFWwindow* window = glfwCreateWindow(800, 800, "Invisible window", NULL, NULL);
if (!window) {
mju_error("Could not create GLFW window");
}
// make context current
glfwMakeContextCurrent(window);
#endif
}
// close OpenGL context/window
void closeOpenGL(void) {
//------------------------ EGL
#if defined(MJ_EGL)
// get current display
EGLDisplay eglDpy = eglGetCurrentDisplay();
if (eglDpy==EGL_NO_DISPLAY) {
return;
}
// get current context
EGLContext eglCtx = eglGetCurrentContext();
// release context
eglMakeCurrent(eglDpy, EGL_NO_SURFACE, EGL_NO_SURFACE, EGL_NO_CONTEXT);
// destroy context if valid
if (eglCtx!=EGL_NO_CONTEXT) {
eglDestroyContext(eglDpy, eglCtx);
}
// terminate display
eglTerminate(eglDpy);
//------------------------ OSMESA
#elif defined(MJ_OSMESA)
OSMesaDestroyContext(ctx);
//------------------------ GLFW
#else
// terminate GLFW (crashes with Linux NVidia drivers)
#if defined(__APPLE__) || defined(_WIN32)
glfwTerminate();
#endif
#endif
}
//-------------------------------- main function ----------------------------------------
int main(int argc, const char** argv) {
// parse numeric arguments
double duration = 10, fps = 60;
// initialize OpenGL and MuJoCo
initOpenGL();
initMuJoCo(xmlpath);
// set rendering to offscreen buffer
mjr_setBuffer(mjFB_OFFSCREEN, &con);
if (con.currentBuffer!=mjFB_OFFSCREEN) {
std::printf("Warning: offscreen rendering not supported, using default/window framebuffer\n");
}
// get size of active renderbuffer
mjrRect viewport = mjr_maxViewport(&con);
int W = viewport.width;
int H = viewport.height;
// allocate rgb and depth buffers
unsigned char* rgb = (unsigned char*)std::malloc(3*W*H);
float* depth = (float*)std::malloc(sizeof(float)*W*H);
if (!rgb || !depth) {
mju_error("Could not allocate buffers");
}
// create output rgb file
std::FILE* fp = std::fopen(rgb_file, "wb");
if (!fp) {
mju_error("Could not open rgbfile for writing");
}
d->qpos[0] = 0.5;
// main loop
double frametime = 0;
int framecount = 0;
while (d->time<duration) {
// render new frame if it is time (or first frame)
if ((d->time-frametime)>1/fps || frametime==0) {
// update abstract scene
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
// render scene in offscreen buffer
mjr_render(viewport, &scn, &con);
// add time stamp in upper-left corner
char stamp[50];
mju::sprintf_arr(stamp, "Time = %.3f", d->time);
mjr_overlay(mjFONT_NORMAL, mjGRID_TOPLEFT, viewport, stamp, NULL, &con);
// read rgb and depth buffers
mjr_readPixels(rgb, depth, viewport, &con);
// insert subsampled depth image in lower-left corner of rgb image
const int NS = 3; // depth image sub-sampling
for (int r=0; r<H; r+=NS)
for (int c=0; c<W; c+=NS) {
int adr = (r/NS)*W + c/NS;
rgb[3*adr] = rgb[3*adr+1] = rgb[3*adr+2] = (unsigned char)((1.0f-depth[r*W+c])*255.0f);
}
// write rgb image to file
std::fwrite(rgb, 3, W*H, fp);
// print every 10 frames: '.' if ok, 'x' if OpenGL error
if (((framecount++)%10)==0) {
if (mjr_getError()) {
std::printf("x");
} else {
std::printf(".");
}
}
// save simulation time
frametime = d->time;
}
// advance simulation
mj_step(m, d);
}
std::printf("\n");
// close file, free buffers
std::fclose(fp);
std::free(rgb);
std::free(depth);
// close MuJoCo and OpenGL
closeMuJoCo();
closeOpenGL();
return 1;
}
#MAC
#COMMON=-O2 -I../../include -L../../bin -mavx -pthread
#LIBS = -w -lmujoco200 -lglfw.3
#CC = gcc
#LINUX
#COMMON=-O2 -I../../include -L../../bin -mavx -pthread -Wl,-rpath,'$$ORIGIN'
#LIBS = -lmujoco200 -lGL -lm -lglew ../../bin/libglfw.so.3
COMMON=-O2 -I../include -L../bin -mavx -pthread -Wl,-rpath,'$$ORIGIN'
LIBS = ../bin/libmujoco.so -lGL -lm ../bin/libglew.so ../bin/libglfw.so.3
CC = g++
#WINDOWS
#COMMON=/O2 /MT /EHsc /arch:AVX /I../../include /Fe../../bin/
#LIBS = ../../bin/glfw3.lib ../../bin/mujoco200.lib
#CC = cl
ROOT = dbpendulum
RECORD=db_record
all:
$(CC) $(COMMON) main.c $(LIBS) -o ../bin/$(ROOT)
$(CC) $(COMMON) record.c $(LIBS) -o ../bin/$(RECORD)
main.o:
$(CC) $(COMMON) -c main.c
record.o:
$(CC) $(COMMON) -c record.c
clean:
rm *.o ../../bin/$(ROOT)
边栏推荐
- Data analysis course notes (III) array shape and calculation, numpy storage / reading data, indexing, slicing and splicing
- 准备好在CI/CD中自动化持续部署了吗?
- The difference between redirectto and navigateto in uniapp
- If the college entrance examination goes well, I'm already graying out at the construction site at the moment
- JWT signature does not match locally computed signature. JWT validity cannot be asserted and should
- Operation test of function test basis
- Markov decision process
- JWT signature does not match locally computed signature. JWT validity cannot be asserted and should
- openresty ngx_lua子请求
- DAY FOUR
猜你喜欢
2022 PMP project management examination agile knowledge points (9)
uniapp中redirectTo和navigateTo的区别
刘永鑫报告|微生物组数据分析与科学传播(晚7点半)
How engineers treat open source -- the heartfelt words of an old engineer
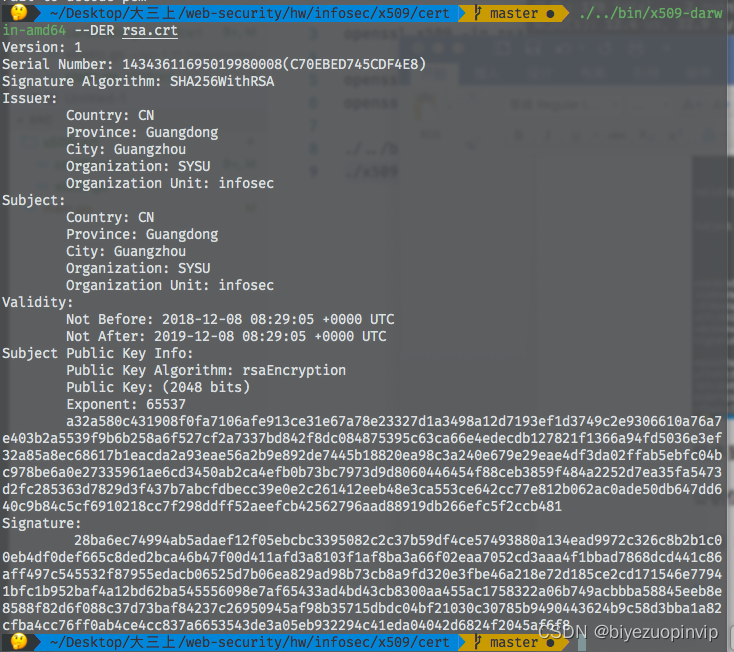
X.509 certificate based on go language

Interface master v3.9, API low code development tool, build your interface service platform immediately
DAY TWO
2022/2/11 summary
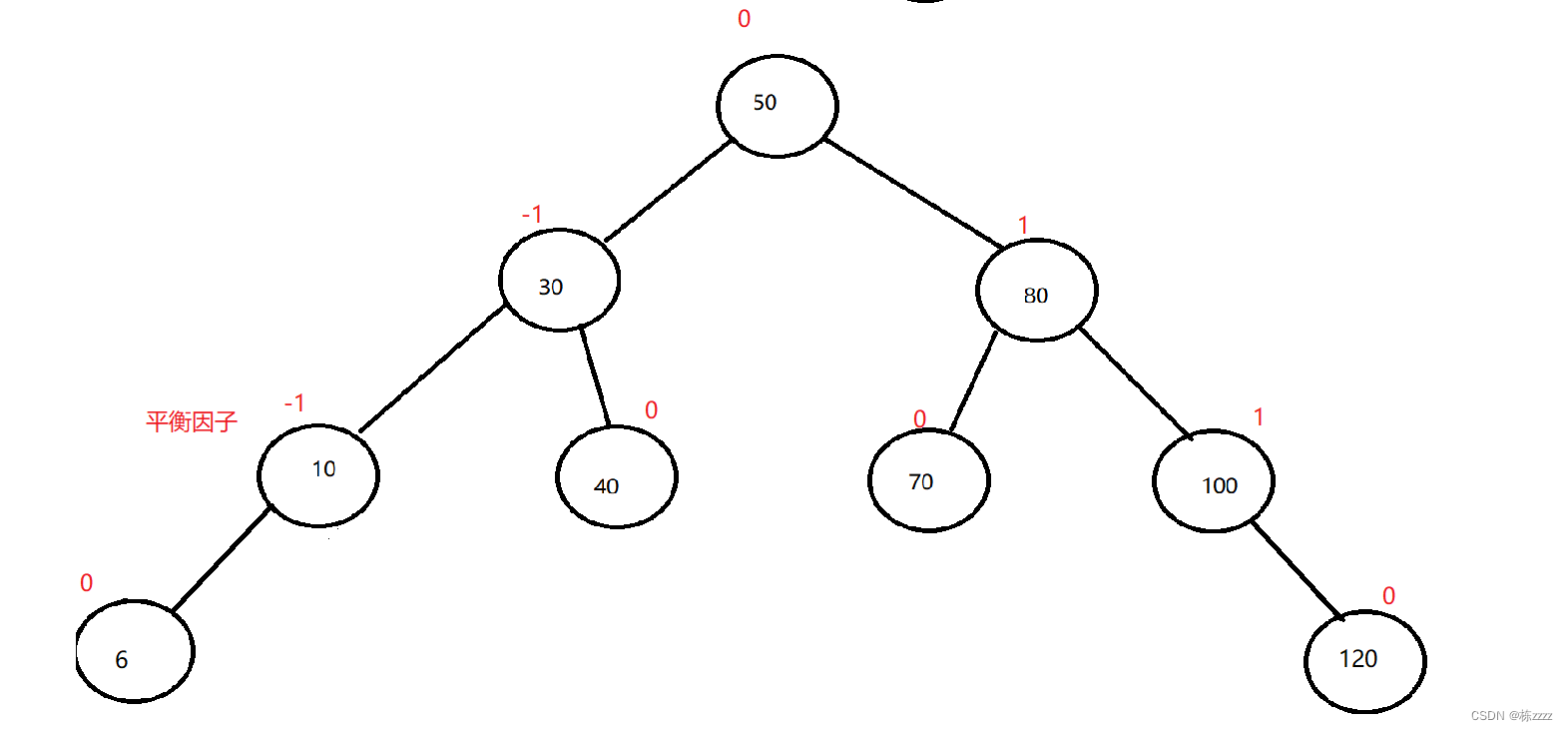
What is AVL tree?
MySQL learning notes (mind map)
随机推荐
[vector retrieval research series] product introduction
DAY THREE
MIT 6.824 - Raft学生指南
Leecode brush question record sword finger offer 58 - ii Rotate string left
Typescript incremental compilation
谷歌百度雅虎都是中国公司开发的通用搜索引擎_百度搜索引擎url
如何判断一个数组中的元素包含一个对象的所有属性值
@TableId can‘t more than one in Class: “com.example.CloseContactSearcher.entity.Activity“.
英雄联盟|王者|穿越火线 bgm AI配乐大赛分享
2022/2/12 summary
MIT 6.824 - raft Student Guide
MySQL主从之多源复制(3主1从)搭建及同步测试
dynamic programming
量子时代计算机怎么保证数据安全?美国公布四项备选加密算法
TypeScript中使用类型别名
[CVPR 2022] semi supervised object detection: dense learning based semi supervised object detection
一图看懂对程序员的误解:西方程序员眼中的中国程序员
Devops can help reduce technology debt in ten ways
2022 PMP project management examination agile knowledge points (9)
Designed for decision tree, the National University of Singapore and Tsinghua University jointly proposed a fast and safe federal learning system