当前位置:网站首页>Special topic of rotor position estimation of permanent magnet synchronous motor -- Summary of position estimation of fundamental wave model
Special topic of rotor position estimation of permanent magnet synchronous motor -- Summary of position estimation of fundamental wave model
2022-07-06 20:07:00 【Explain the motor in simple terms】
introduction
This paper classifies the methods of estimating the rotor position through the fundamental wave model of permanent magnet synchronous motor , Summarize the angle estimated by back EMF 、 Estimate the angle through the rotor flux 、 Closed loop scheme , Three different ideas , Break it down one by one , Its core principles are described respectively , It also outlines the different ideas of different schemes , Give relevant papers for reference .
List of articles
1、 Back EMF method
The last article deduced α β \alpha \beta αβ Voltage equation in coordinate system
[ v α v β ] = [ i α i β ] R s + d d t [ L s i α L s i β ] + [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] (1) \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] = \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s + \frac{d}{dt} \left[\begin{array}{c}L_s i_{\alpha }\\L_s i_{\beta } \end{array}\right] + \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right] \tag{1} [vαvβ]=[iαiβ]Rs+dtd[LsiαLsiβ]+[−ωeϕfsinθωeϕfcosθ](1)
among ω e \omega_e ωe Is the electrical angular velocity .
Easy to see , α β \alpha \beta αβ The voltage consists of three parts , Resistance voltage drop , The voltage produced by the change of inductive current , The back electromotive force produced by the change of the flux linkage of the equivalent permanent magnet . As mentioned above , The rotor position of permanent magnet synchronous motor can be extracted from the back EMF . The key point of various position estimation methods of back EMF is to separate the back EMF term from the voltage equation . We are running senseless foc when , Motor stator resistance , Motor stator inductance , The flux linkage constant of the permanent magnet is a known constant , Voltage and current are measurable parameters , speed 、 The rotor position is the parameter to be estimated . For the three components of the voltage equation , The resistance voltage drop part is easy to calculate , The inductance voltage cannot be accurately calculated because it involves differentiation , Although the voltage is known , However, the direct calculation error of inductance voltage is large , It is difficult to directly separate the components of back EMF .
For this kind of content that is difficult to calculate directly , It is often estimated by designing observers .
d d t [ i α i β ] = [ v α v β ] 1 L s − [ i α i β ] R s L s + [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] 1 L s (2) \frac{d}{dt} \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] = \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] \frac{1}{L_s} - \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] \frac{R_s}{L_s} + \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right]\frac{1}{L_s} \tag{2} dtd[iαiβ]=[vαvβ]Ls1−[iαiβ]LsRs+[−ωeϕfsinθωeϕfcosθ]Ls1(2)
The written voltage equation is in the above form , For the rightmost back EMF term , Not easy to calculate , As an unknown part , Current equals formula 2 The integral on the right . There may be an error between the current obtained by integration and the real current sampled , use e r r α , e r r β err_{\alpha} ,err_{\beta} errα,errβ Express .
[ i ^ α i ^ β ] = [ v α v β ] 1 L s − [ i ^ α i ^ β ] R s L s + [ x α + e r r α x β + e r r β ] 1 L s (3) \left[\begin{array}{c}\hat i_{\alpha }\\ \hat i_{\beta } \end{array}\right] = \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] \frac{1}{L_s} - \left[\begin{array}{c} \hat i_{\alpha }\\ \hat i_{\beta } \end{array}\right] \frac{R_s}{L_s} + \left[\begin{array}{c}x_{\alpha} + err_{\alpha}\\ x_{\beta} +err_{\beta}\end{array}\right]\frac{1}{L_s} \tag{3} [i^αi^β]=[vαvβ]Ls1−[i^αi^β]LsRs+[xα+errαxβ+errβ]Ls1(3)
among
e r r α = i α − i ^ α ; e r r β = i β − i ^ β err_{\alpha} = i_{\alpha} - \hat i_{\alpha};err_{\beta}= i_{\beta} - \hat i_{\beta} errα=iα−i^α;errβ=iβ−i^β
Use some form of correction , Such as synovium , send e r r α = 0 , e r r β = 0 err_{\alpha} = 0,err_{\beta} = 0 errα=0,errβ=0, be
[ x α x β ] = [ − ω e ϕ f s i n θ ω e ϕ f c o s θ ] \left[\begin{array}{c}x_{\alpha}\\ x_{\beta} \end{array}\right] = \left[\begin{array}{c}- \omega_e \phi_{f } sin\theta \\ \omega_e\phi_{f}cos\theta \end{array}\right] [xαxβ]=[−ωeϕfsinθωeϕfcosθ]
Here we are , Complete the separation of the back EMF term , adopt arctan Or phase locked loop calculation can obtain the rotor position , For speed , It can be obtained by phase-locked loop , It can also be obtained by positional differentiation , in addition , x α 2 + x β 2 / ϕ f \sqrt{ x_{\alpha}^2 + \\ x_{\beta}^2}/ \phi_f xα2+xβ2/ϕf You can also get the rotor speed .
Related articles :
Kim H, Son J, Lee J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2010, 58(9): 4069-4077.
observation i α , i β i_{\alpha},i_{\beta} iα,iβ, Use the traditional synovial observer Signum Function Do the switch function , This article USES the sigmoid function Do the switch function , Low pass filtering can be avoided .
Qiao Z, Shi T, Wang Y, et al. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor[J]. IEEE Transactions on Industrial electronics, 2012, 60(2): 710-719.
This article is optimized on the basis of the previous article , A speed observer is designed , Instead of calculating speed by differentiating angles .
2、 Flux linkage method
The last article mentioned α β \alpha \beta αβ The following expression of the voltage equation in the coordinate system .
[ v α v β ] = [ i α i β ] R s + d d t [ ϕ α ϕ β ] (4) \left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] = \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s + \frac{d}{dt} \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] \tag{4} [vαvβ]=[iαiβ]Rs+dtd[ϕαϕβ](4)
among ϕ α ϕ β \phi_{\alpha} \phi_{\beta} ϕαϕβ Express α β \alpha \beta αβ Axial flux linkage
[ ϕ α ϕ β ] = ∫ ( [ v α v β ] − [ i α i β ] R s ) d t (5) \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] = \int \left( {\left[\begin{array}{c} v_{\alpha }\\ v_{\beta } \end{array}\right] - \left[\begin{array}{c} i_{\alpha }\\ i_{\beta } \end{array}\right] R_s }\right) dt \tag{5} [ϕαϕβ]=∫([vαvβ]−[iαiβ]Rs)dt(5)
Finishing type 4, Get the formula 5, The flux linkage can be written in addition to the resistance voltage drop , Integration of other voltages . Imagine a coil , Placed in a magnetic field , When the magnetic field changes , Voltage will be generated at both ends of the first coil . Easy to understand formula 4, Understand the formula 4, It is easy to deduce the formula 5, type 5 Calculate the flux linkage through the integration of voltage , This formula can be called the voltage model of permanent magnet synchronous motor flux linkage model ..
Above α β \alpha \beta αβ The flux linkage is the total flux linkage on two axes , The flux linkage of each shaft can be written as the combination of rotor part flux linkage and stator part flux linkage . stay d q dq dq Coordinate system , d d d Shaft is defined as rotor permanent magnet N The direction of the pole , So the rotor permanent magnet flux linkage ϕ f \phi_f ϕf All in d d d Axis , meanwhile d q dq dq The shaft also has stator flux .
As mentioned earlier, the change of magnetic field will generate voltage at both ends of the coil , The stator inductance of permanent magnet synchronous motor is such a coil .
from ϕ = ∫ v d t \phi = \int{v}dt ϕ=∫vdt; And L d i d t = v L\frac{di}{dt} = v Ldtdi=v; Available ϕ = L i \phi = Li ϕ=Li; That is, the magnetic chain generated by the current flowing through the coil is the product of inductance and current , if d q dq dq The shaft current is not 0, d q dq dq The shaft flux linkage will contain stator flux linkage components , adopt ipark transformation α β \alpha \beta αβ Axial flux linkage , As follows .
[ ϕ α ϕ β ] = [ c o s θ s i n θ − s i n θ c o s θ ] [ L s i d + ϕ f L s i q ] (6) \left[\begin{array}{c} \phi_{\alpha }\\ \phi_{\beta } \end{array}\right] = \left[\begin{array}{c} cos\theta&sin\theta\\ -sin\theta & cos\theta \end{array}\right] \left[\begin{array}{c} L_s i_{d } + \phi_f\\ L_s i_{q } \end{array}\right] \tag{6} [ϕαϕβ]=[cosθ−sinθsinθcosθ][Lsid+ϕfLsiq](6)
This formula is calculated by the current flowing through the inductance α β \alpha \beta αβ Axial flux linkage , It can be called the current model of permanent magnet synchronous motor flux model .
Because the rotor position information is contained in the rotor flux linkage component , And this part is easy to pass α β \alpha \beta αβ Separation of flux linkage equations in coordinate system , The position estimation methods of flux linkage are mostly α β \alpha \beta αβ Calculate the total flux linkage in the coordinate system , Then subtract the stator flux , Get the rotor flux , Then the rotor position and speed are obtained by using phase-locked loop , Or obtain the rotor position by arctangent , Then the differential gives the velocity .
It is worth mentioning that the rotor flux linkage has nothing to do with the motor speed , Using the flux linkage method to estimate the rotor position of the motor is easy to obtain better low-speed performance .
To accurately separate the rotor flux components is a core problem of the flux method , The common way is to calculate the total flux linkage through the voltage and current model , Then take a reference value that is not easy to change to correct the error . Or the famous reference model adaptive method , Take the current model as a reference , Voltage model adaptation ; The two models can also be fused directly , Trust the current model at low speed , Trust the voltage model at high speed .
The way of magnetic linkage is 2010 The more popular method after years , There are many points worth discussing in detail , Relevant content will be analyzed in a subsequent meeting .
Related articles :
Lee J, Hong J, Nam K, et al. Sensorless control of surface-mount permanent-magnet synchronous motors based on a nonlinear observer[J]. IEEE Transactions on power electronics, 2009, 25(2): 290-297.
Famous nonlinear observer , Use the rotor flux to correct the voltage model .
An L, Franck D, Hameyer K. Sensorless control for surface mounted permanent magnet synchronous machines at low speed[C]//2013 International Conference on Electrical Machines and Systems (ICEMS). IEEE, 2013: 77-82.
Use current model to correct voltage model , Or use the sampling current to correct the voltage model .
3、 Closed loop method
First look at d q dq dq Coordinate system voltage equation
u d = R s i d + L d d i d d t − ω e L q i q u q = R s i q + L q d i q d t + ω e L d i d + ω e ϕ f (7) u_d = R_s i_d + L_d \frac{di_d}{dt}- \omega_eL_qi_q\\ u_q = R_s i_q + L_q \frac{di_q}{dt} + \omega_e L_d i_d + \omega_e \phi_f \tag{7} ud=Rsid+Lddtdid−ωeLqiquq=Rsiq+Lqdtdiq+ωeLdid+ωeϕf(7)
d q dq dq The idea of position estimation in coordinate system is essentially different from that mentioned above , The two methods mentioned above belong to open-loop schemes , The input of the position observer is i α , i β ; u α , u β i_{\alpha},i_{\beta};u_{\alpha},u_{\beta} iα,iβ;uα,uβ, The output of the observer is angle and speed . The output of the observer will not affect the input in turn .
however d q dq dq The scheme under the coordinate system is different , This kind of scheme requires that the input is calculated by using the angle of the observer output i d , i q ; u d , u q i_d,i_q;u_d,u_q id,iq;ud,uq, And then use i d , i q i_d,i_ q id,iq Calculated by voltage equation u ^ d , u ^ q \hat u_d,\hat u_q u^d,u^q, Or use u d , u q u_d,u_ q ud,uq Calculated by voltage equation i ^ d , i ^ q \hat i_d,\hat i_q i^d,i^q, The estimated value is compared with the sampled value , If the angle is more accurate , The error is relatively small , Or on the contrary, if the estimation error tends to 0, Then the output angle of the observer converges near the real angle .
To look back d q dq dq Voltage equation in coordinate system , Back EMF component at rated speed ω e ϕ f \omega_e\phi_f ωeϕf Generally, it can occupy q q q Shaft voltage 70% above , If the angle is accurate , The back EMF components will all lead out at q q q Axis , If there is an error in the angle , d d d The shaft will have a back EMF component , Calculated using the voltage equation d d d The shaft voltage will be significantly less than park Transformed d d d Shaft voltage . Closed loop methods often take similar errors as inputs , Design regulator , The output of the regulator is speed or angle , Adjustment makes the error approach 0, The angle is the exact angle .
There are also many places worth discussing in this kind of scheme , The following articles will be analyzed in detail .
Related articles :
Lascu C, Andreescu G D. PLL position and speed observer with integrated current observer for sensorless PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5990-5999.
2020 New paper in , Use a current observer to estimate d q dq dq electric current , The angle and speed errors are reflected by current errors .
Harnefors L, Ottersten R. Regenerating-Mode Stabilization of the “Statically Compensated Voltage Model”[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 818-824.
Good low-speed performance is achieved
4、 Summary
It says 3 The specific principle of class method , According to my understanding and observation of the industry , Back EMF method was the mainstream method in the early years , So far, the scheme of high-speed motor control is also used , This kind of method is difficult to achieve good low-speed performance . The method of magnetic linkage is the mainstream in recent years , Many common platforms such as ti fast The scheme uses the magnetic linkage method , This kind of method is easy to achieve better low-speed performance . The closed-loop method is a new scheme , It can also achieve better low-speed performance , Online transmission Huichuan has turned to this kind of scheme , According to my judgment of industry trends , This kind of method will be applied more in the future .
边栏推荐
- Tencent T3 teaches you hand in hand. It's really delicious
- BUUCTF---Reverse---easyre
- Vscode debug run fluent message: there is no extension for debugging yaml. Should we find yaml extensions in the market?
- 爬虫(14) - Scrapy-Redis分布式爬虫(1) | 详解
- 腾讯云数据库公有云市场稳居TOP 2!
- Tencent byte Alibaba Xiaomi jd.com offer got a soft hand, and the teacher said it was great
- Method keywords deprecated, externalprocname, final, forcegenerate
- A5000 vgpu display mode switching
- beegfs高可用模式探讨
- Configuration and simple usage of the EXE backdoor generation tool quasar
猜你喜欢
持续测试(CT)实战经验分享
![[play with Linux] [docker] MySQL installation and configuration](/img/04/6253ef9fdf7d2242b42b4c7fb2c607.png)
[play with Linux] [docker] MySQL installation and configuration
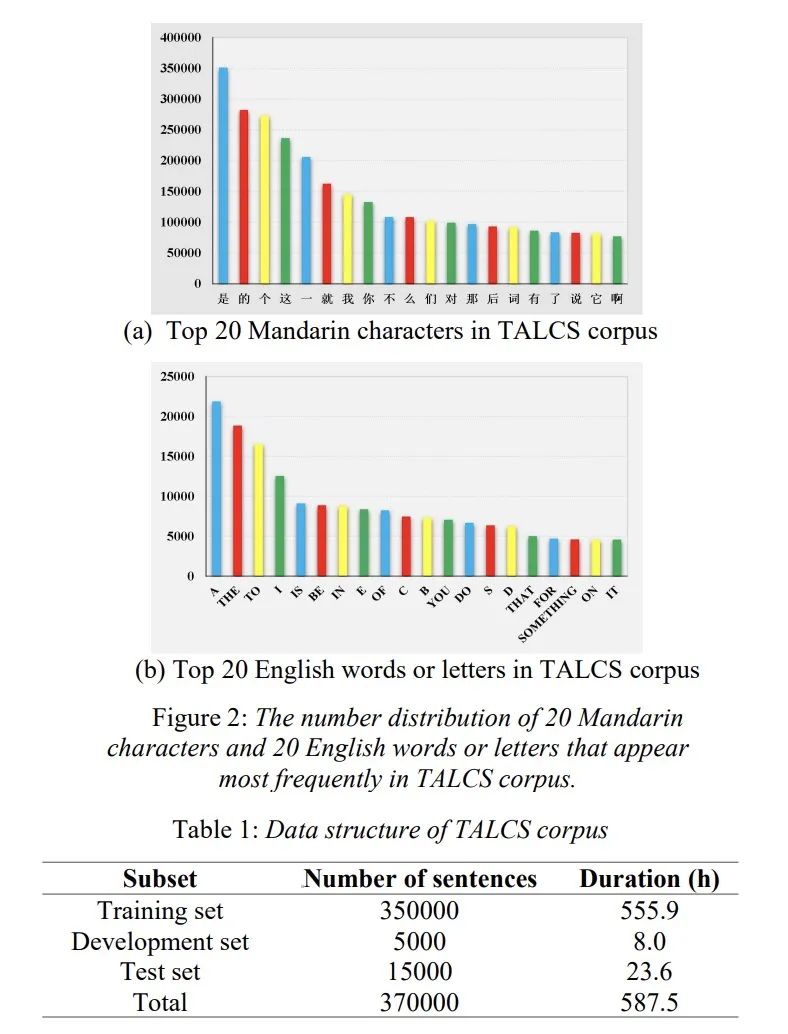
语音识别(ASR)论文优选:全球最大的中英混合开源数据TALCS: An Open-Source Mandarin-English Code-Switching Corpus and a Speech
Tencent Android development interview, basic knowledge of Android Development
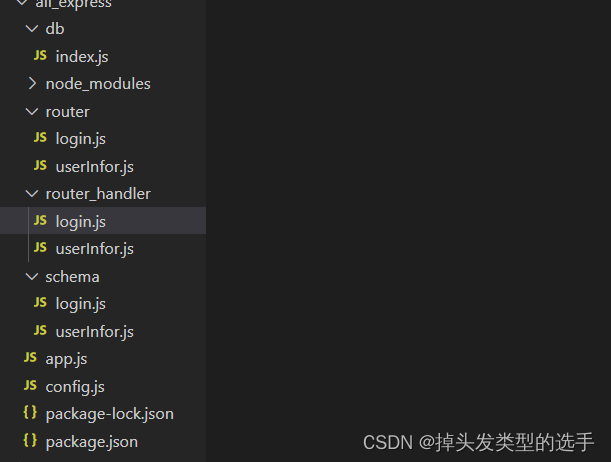
Node.js: express + MySQL实现注册登录,身份认证
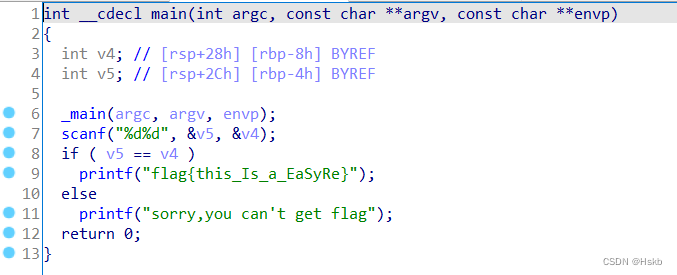
BUUCTF---Reverse---easyre
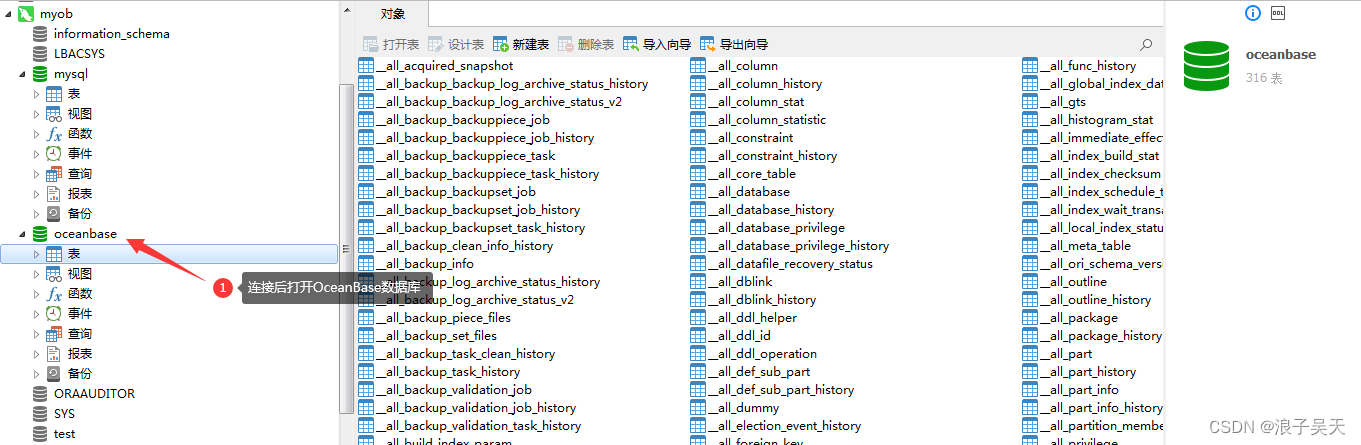
OceanBase社区版之OBD方式部署方式单机安装
Oceanbase Community Edition OBD mode deployment mode stand-alone installation
![[network planning] Chapter 3 data link layer (4) LAN, Ethernet, WLAN, VLAN](/img/b8/3d48e185bb6eafcdd49889f0a90657.png)
[network planning] Chapter 3 data link layer (4) LAN, Ethernet, WLAN, VLAN
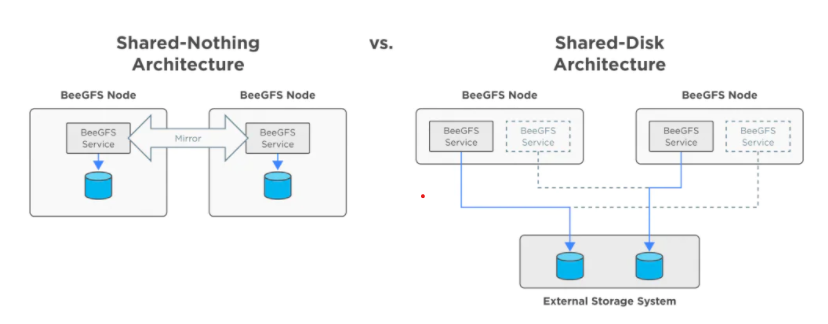
beegfs高可用模式探讨
随机推荐
8086指令码汇总表(表格)
信息系统项目管理师---第八章 项目质量管理
Redisson bug analysis
Tencent Android development interview, basic knowledge of Android Development
Database specific interpretation of paradigm
Speech recognition (ASR) paper selection: talcs: an open source Mandarin English code switching corps and a speech
Tencent cloud database public cloud market ranks top 2!
深入浅出,面试突击版
Microservice architecture debate between radical technologists vs Project conservatives
Enumeration gets values based on parameters
mod_wsgi + pymssql通路SQL Server座
腾讯字节阿里小米京东大厂Offer拿到手软,老师讲的真棒
青龙面板白屏一键修复
Introduction of Xia Zhigang
[cloud native and 5g] micro services support 5g core network
Groovy基础语法整理
5. 无线体内纳米网:十大“可行吗?”问题
JVM_ Common [interview questions]
部门树递归实现
《数字经济全景白皮书》保险数字化篇 重磅发布