当前位置:网站首页>Arduino控制微小的六足3D打印机器人
Arduino控制微小的六足3D打印机器人
2022-07-05 15:15:00 【acktomas】
Arduino控制微小的六足3D打印机器人
前段时间,我在 Thingiverse 上发现了一个 3D 打印的 Micro-Hexapod。
我开始通过以下方式进行研究:
创建可 3D 打印的新配件/组件
探索驱动这个六足位移台的可能方法。
结果如下:
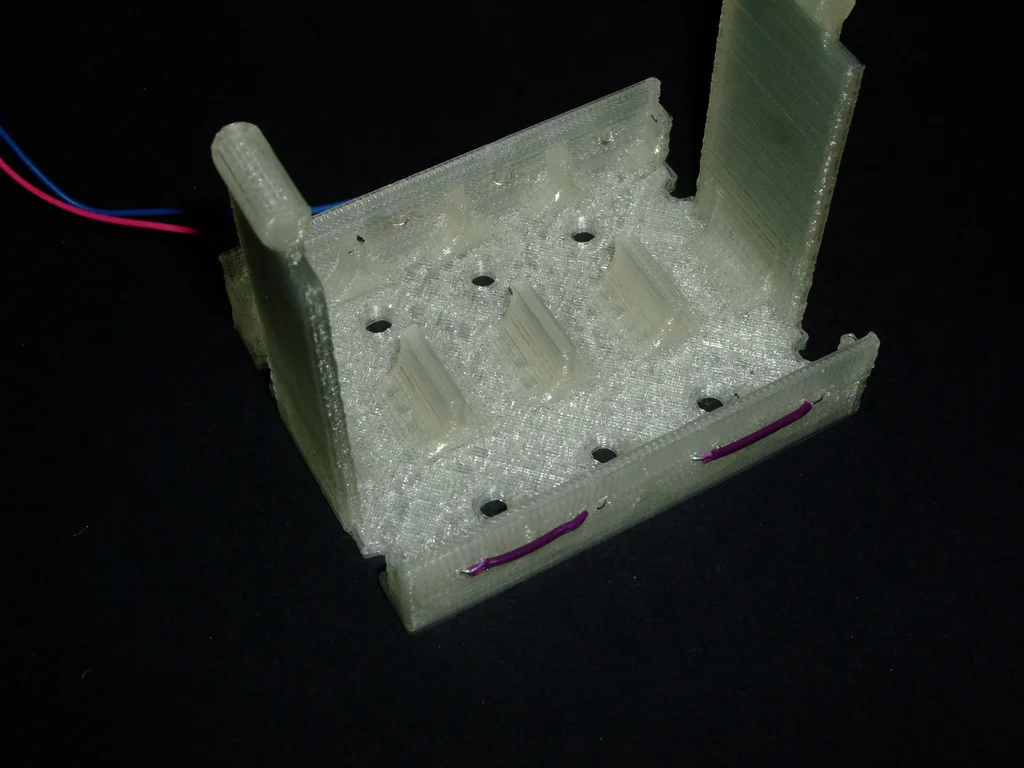
一个完全适合它的参数化电池座,无需螺丝
一个参数化笔架,可将这个六足机器人转换成绘图机器人!
您可以通过蓝牙、智能手机(在这里您还可以找到一个 Android 应用程序!)或 PC驱动这个六足机器人
您可以使用双节棍来驱动这个六足机器人
六足机器人可以充当光跟随器
现在您将看到如何构建一个完整的工作六足机器人!
第 1 步:材料清单


需要以下打印零件:
1 个微型六足机器人 http://www.thingiverse.com/thing:5156(由 ljon)
http://www.thingiverse.com/thing:34796(由 carlosgs 重新混合)
文件:body. stl 和legs.stl
1x 4AA 电池夹
http://www.thingiverse.com/thing:109807(由我提供)
文件:battery_clip_4AA.stl
1x 笔架
http://www.thingiverse.com/thing:110331(由me)
文件:PenHolder_hexapoduino_front.stl & PenHolder_hexapoduino_back.stl
您最终可以打印一个昆虫头/微笑/其他放在六足动物的前面,以对其进行个性化。
还需要电子零件:
- 1x Arduino Mini 或 Arduino UNO(或兼容)
- 3x Microservo 9G
- 4x AA 电池(可充电更好)
然后,如果你想制作一个光跟随机器人,你需要:
- 2x LDR
- 2x 10K 电阻
如果你想用双节棍驱动你的机器人,你需要:
- 1x nunchuk
- 1x nunchuk 适配器(您可以购买或从旧/损坏的 wiimote 中移除)
- 1x 10K 电阻
如果您想通过蓝牙驱动机器人,您需要:
- 1x HC-05(或兼容)蓝牙模块
- 1x 2K2 电阻
- 1x TS2950 33(或兼容)电压调节器
附件
PenHolder_hexapoduino_front.stl
下载
PenHolder_hexapoduino_back.stl
下载
leg.stl
下载
body.stl
下载
battery_clip_square_4AA.stl
下载
OpenSCAD_source.zip
下载
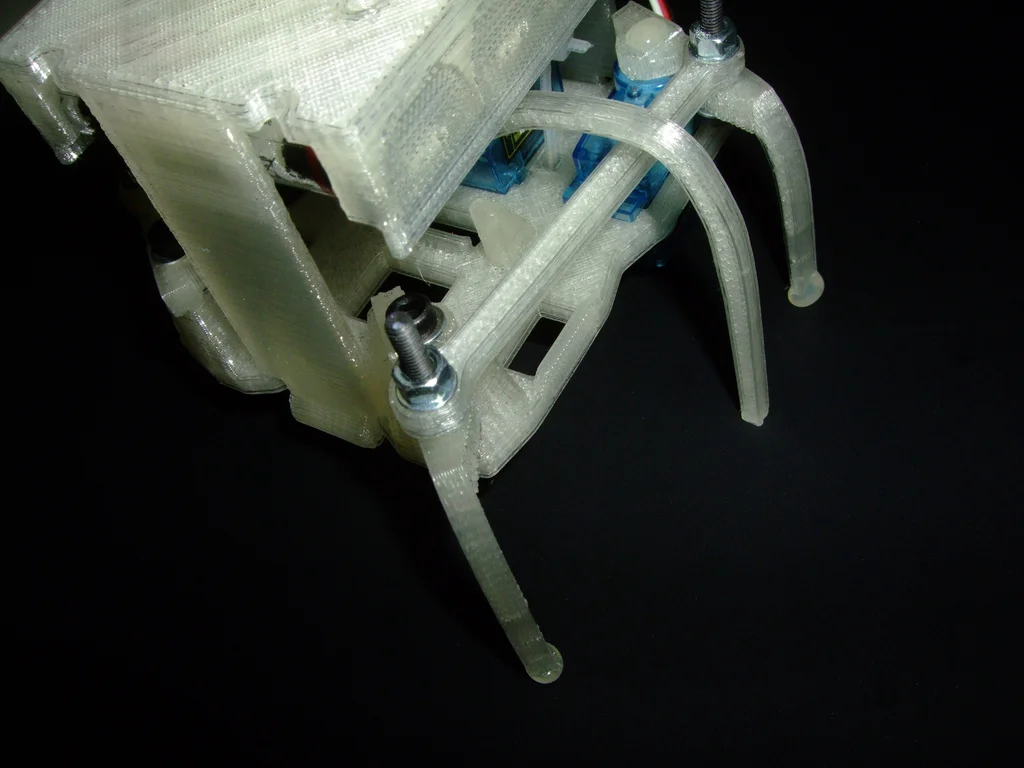
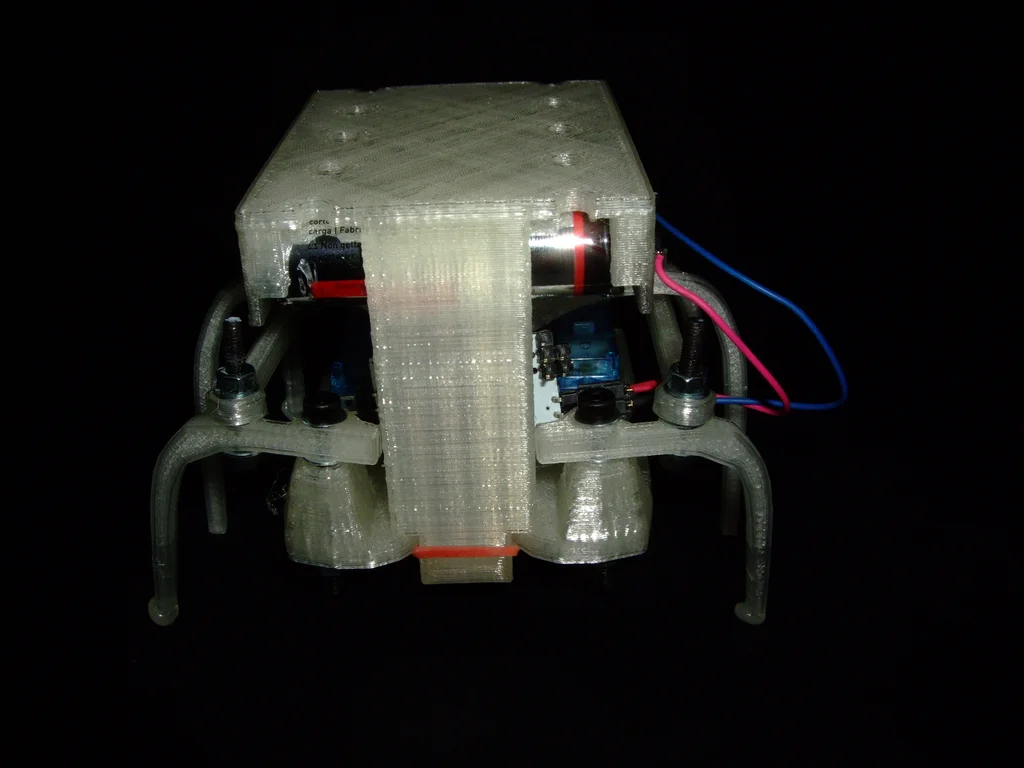
第 2 步:构建六足动物
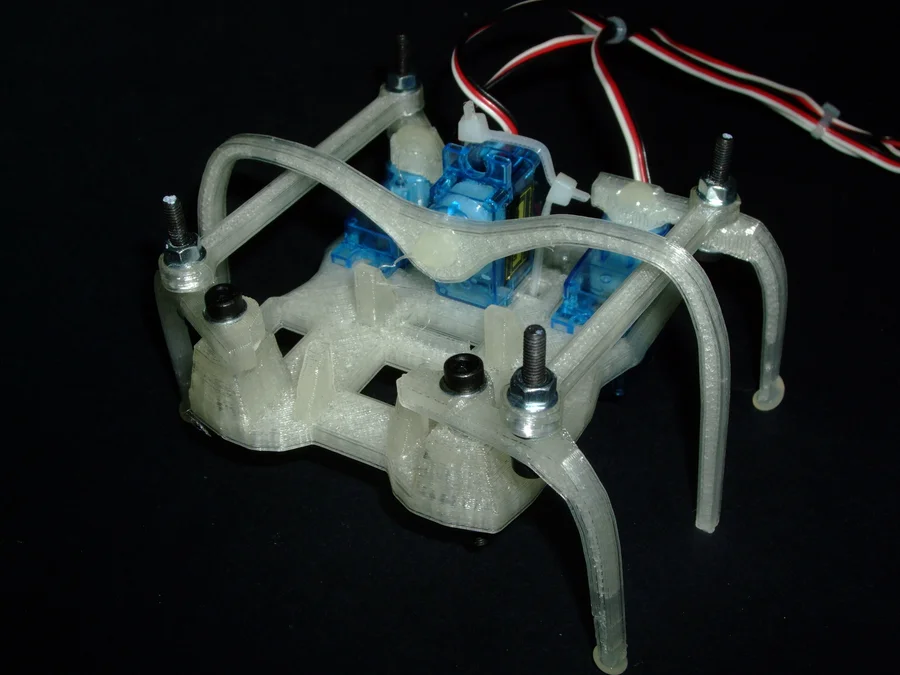
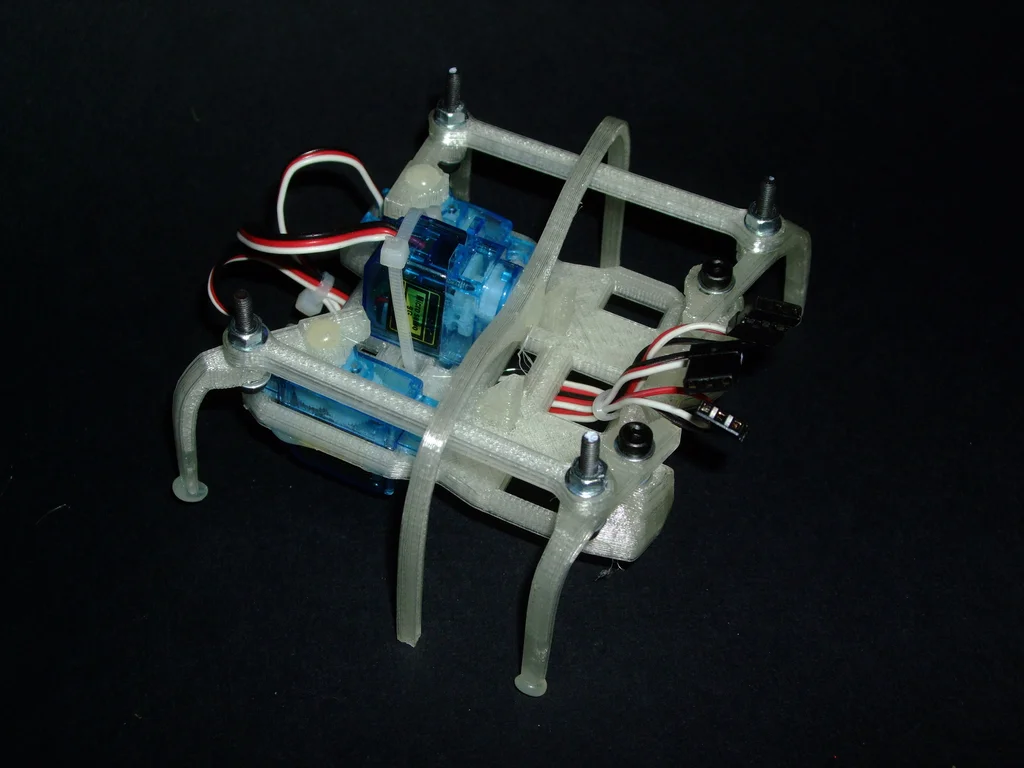
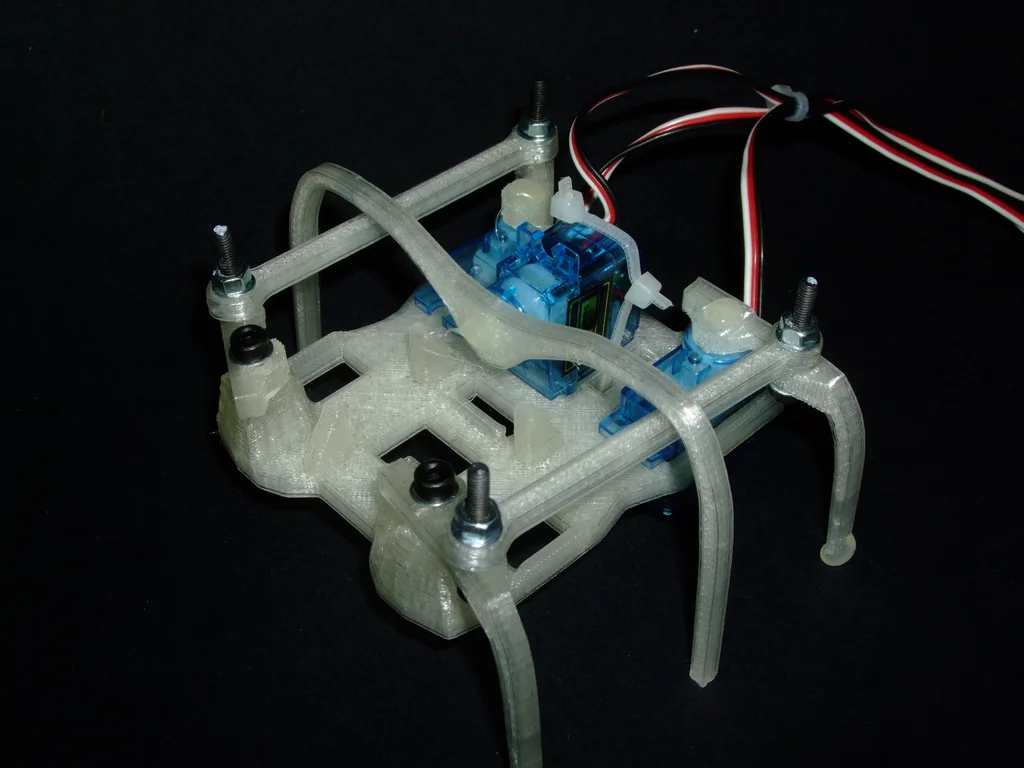
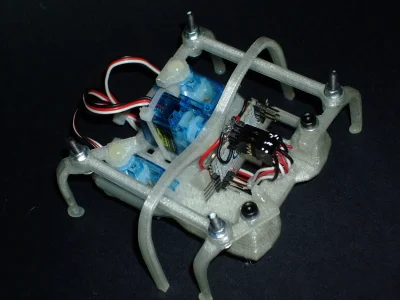
构建六足机器人真的很容易。
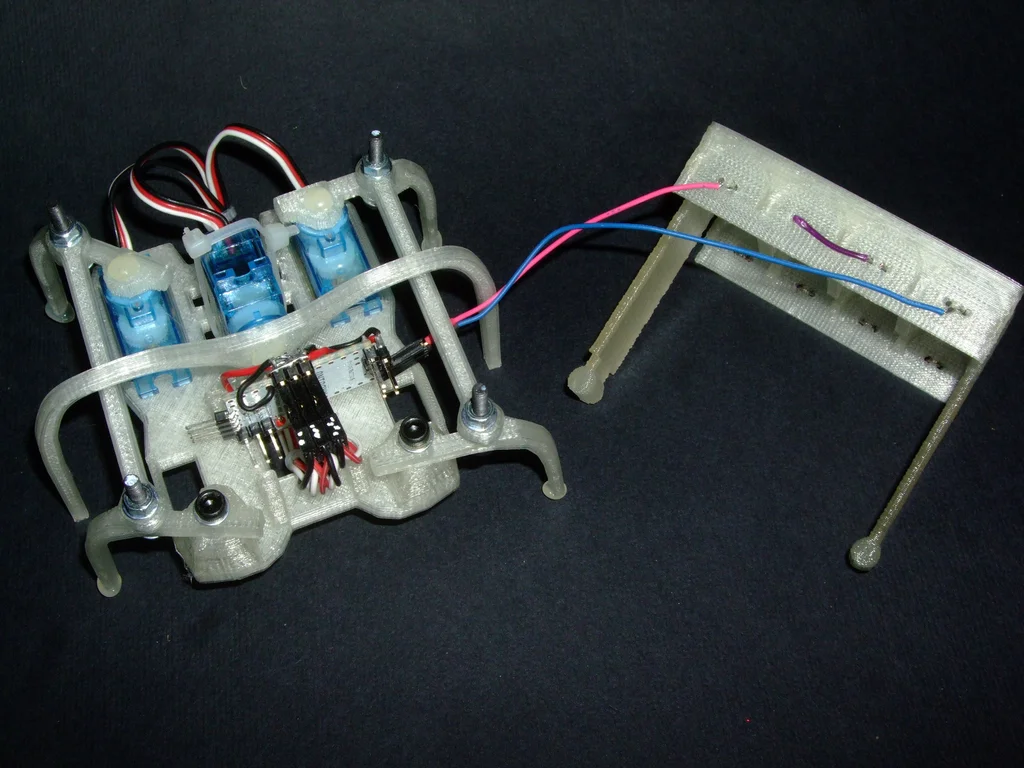
您可以使用热胶将伺服电机固定在板上。然后使用几个 m3 螺钉 (6个)、螺母 (6个) 和垫圈 (12个),您可以将支腿固定在板上。
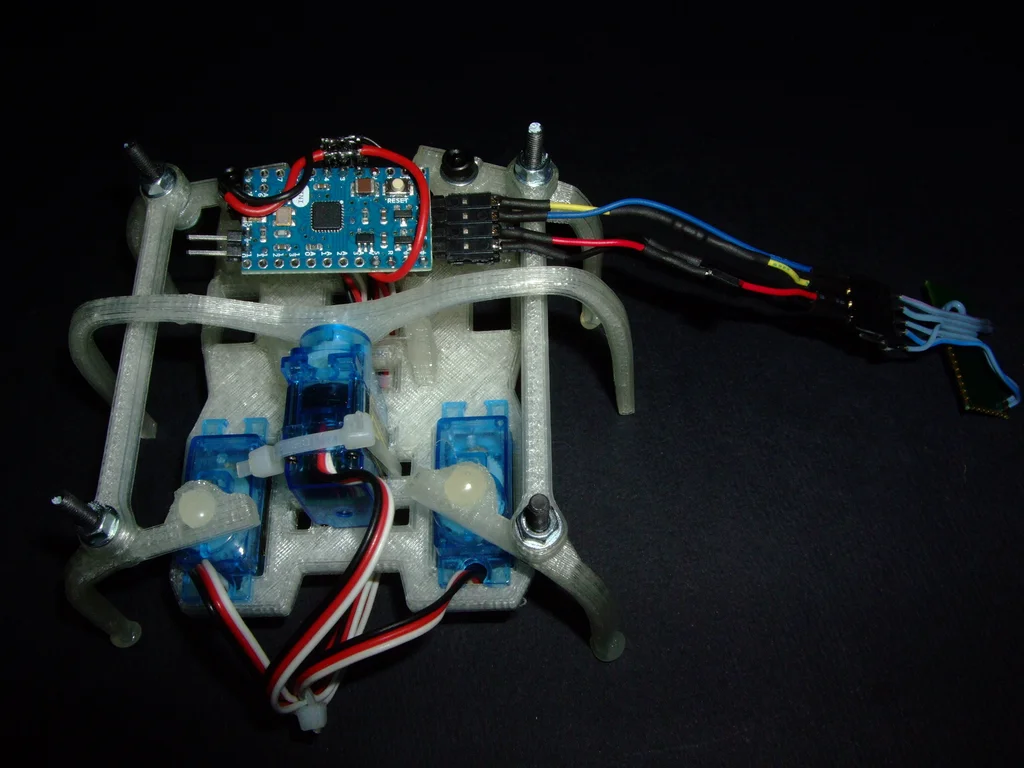
第 3 步:将电机连接到 Arduino 和电源
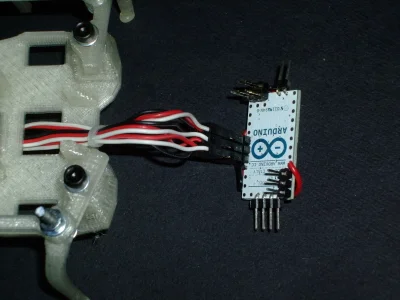
然后你需要将伺服电机连接到 Arduino。
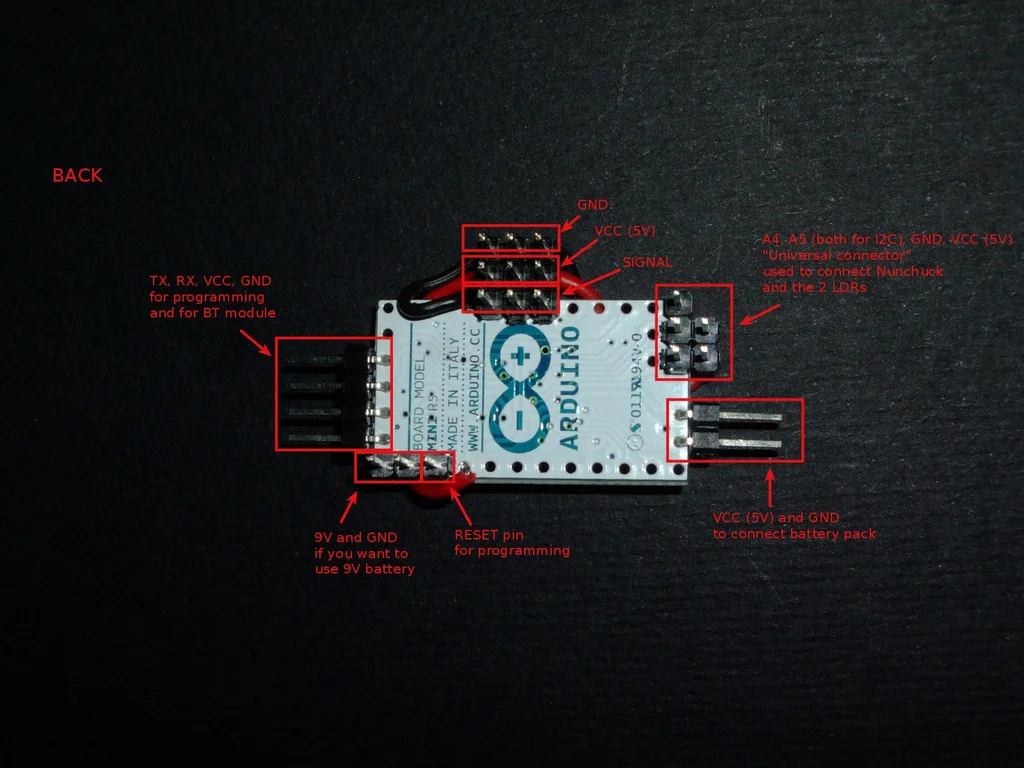
伺服电机有 3 个引脚:
- 红色的一个用于电源 / vcc (5V)
- 黑色的一个用于接地 (GND)
- 白色的一个用于驱动电机本身
中央伺服电机的信号线必须连接到Arduino pin D2
右伺服电机必须连接到 Arduino pin D3
左伺服电机必须连接到 Arduino pin D4
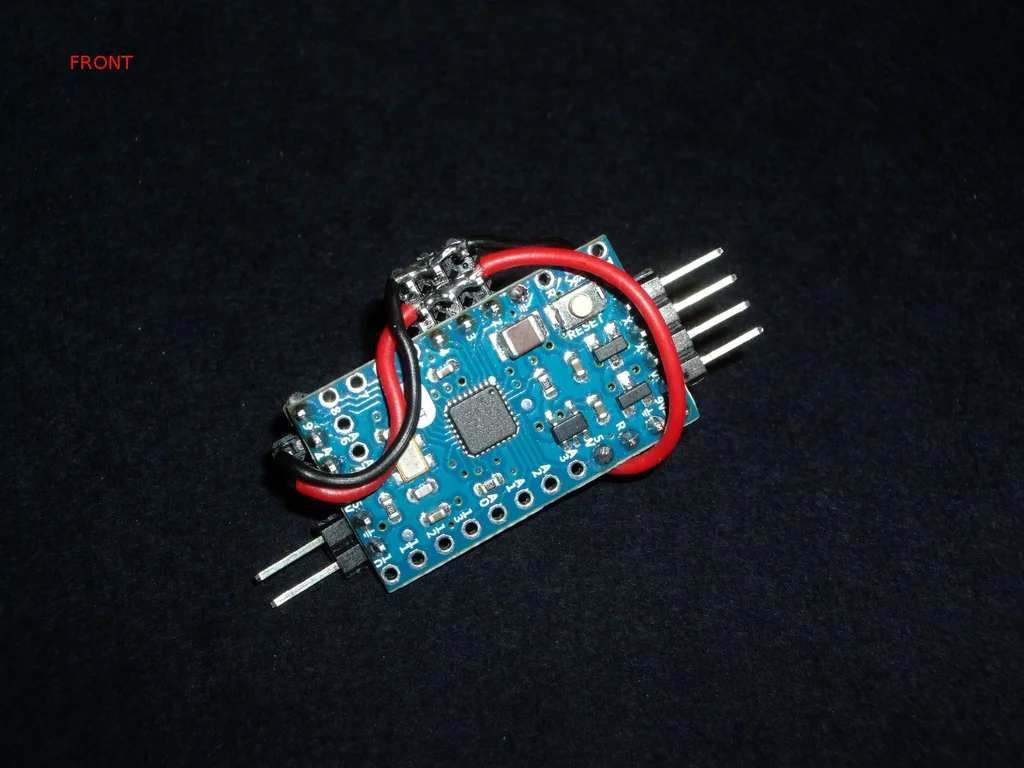
如前所述,您可以使用 Arduino UNO 或 Arduino MINI,步骤完全相同。如果您想使用Arduino Mini,请查看照片。解释了该项目中可用的所有引脚。
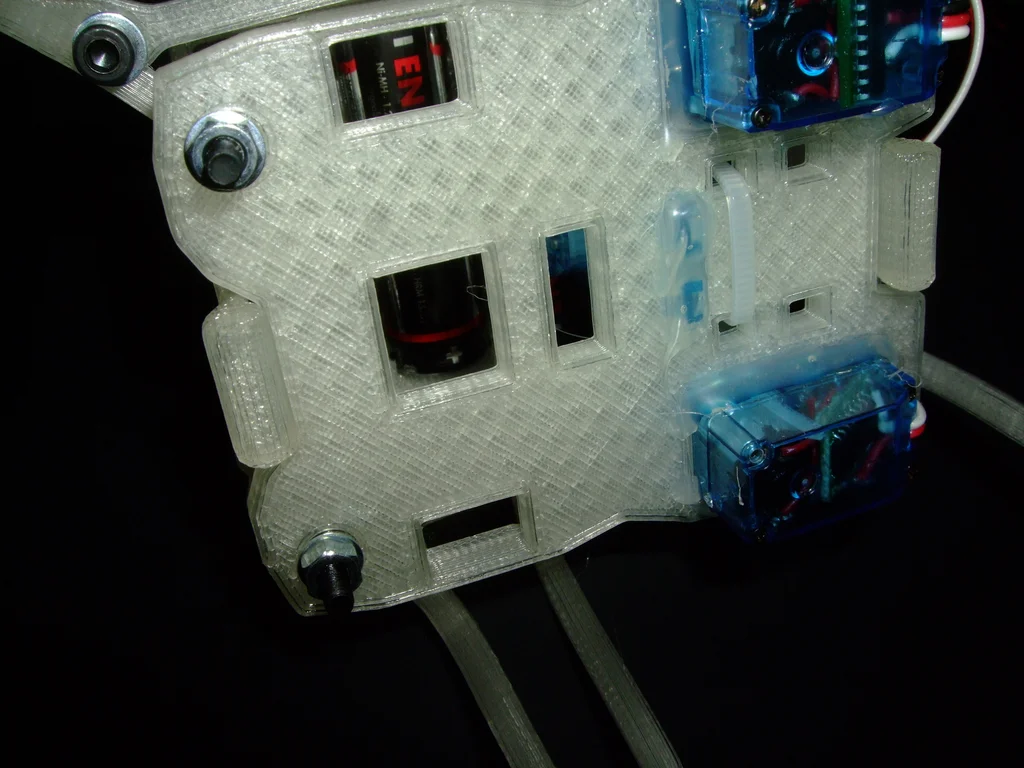
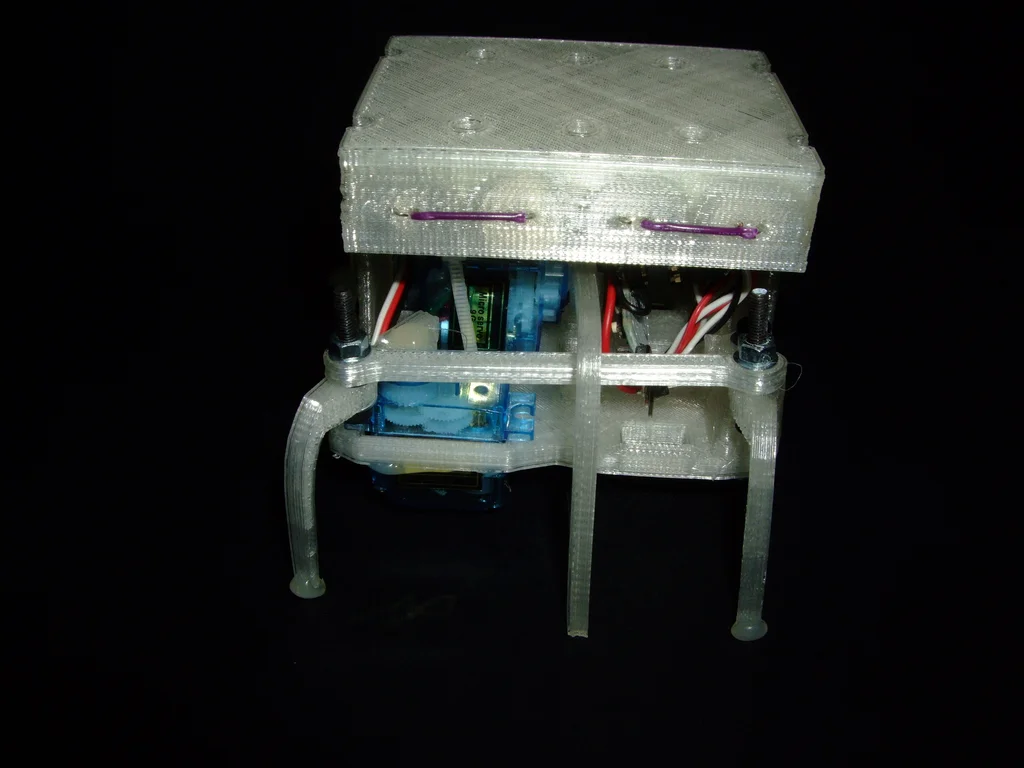
将伺服电机连接到 Arduino 后,您可以将 Arduino 安装在盘子中。
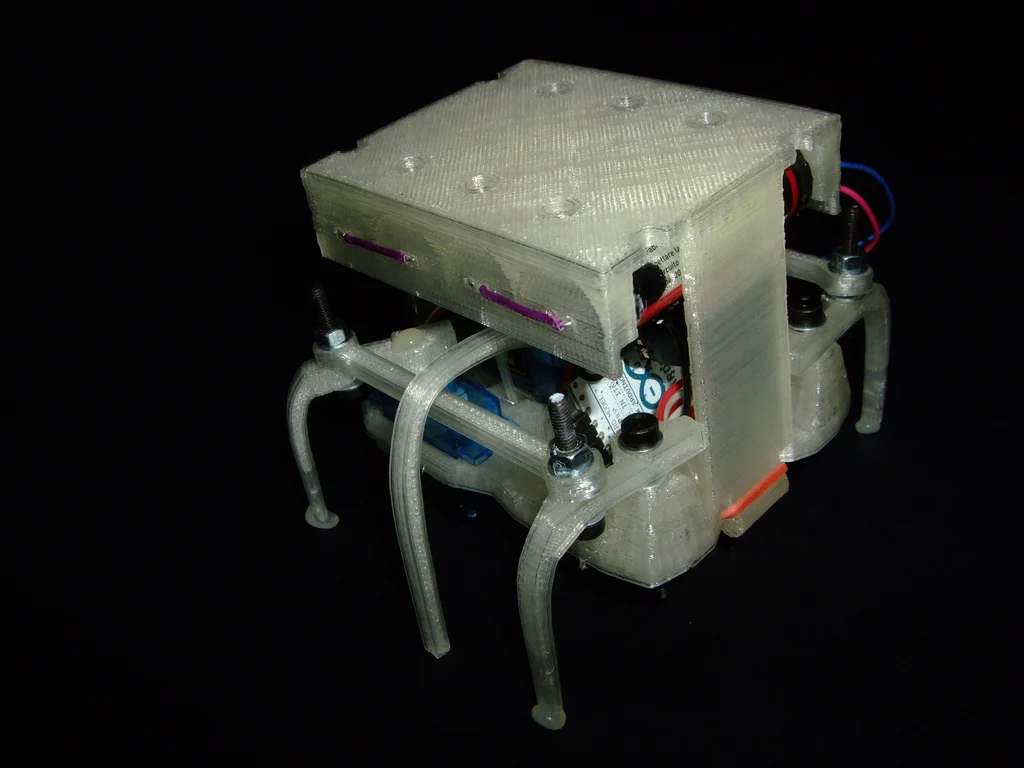
然后你需要为Arduino 和伺服电机供电。您可以选择 9v 电池或 4AA 电池(更好)。在这种情况下,您需要准备电池座,创建序列化电池的电路。
第 4 步:第一次测试!…并组装所有零件!
是时候进行第一次测试了。
与 Arduino 一起使用的库是 ArduSnake:
https://github.com/Obijuan/ArduSnake下载并安装它。
如果您不知道如何在 Arduino 上安装新库,请遵循本指南:
https://docs.arduino.cc/software/ide-v1/tutorials/installing-libraries
您可以使用此处提供的代码进行测试:
http://www.thingiverse.com/download:100066
由 Thingiverse 用户 carlosgs 发布, 将 skecth上传到您的 Arduino 中,您将看到六足位移台的第一步
如果您不知道如何将草图上传到 Arduino Mini,您可以参考这里:https://docs.arduino.cc/retired/boards/arduino-mini-05
如果测试没问题,我们就可以继续学习如何驾驶我们的六足机器人了!
在此之前,您需要上传完整的功能代码!
一切都在这里(更新):
https://github.com/pictux/Hexapoduino
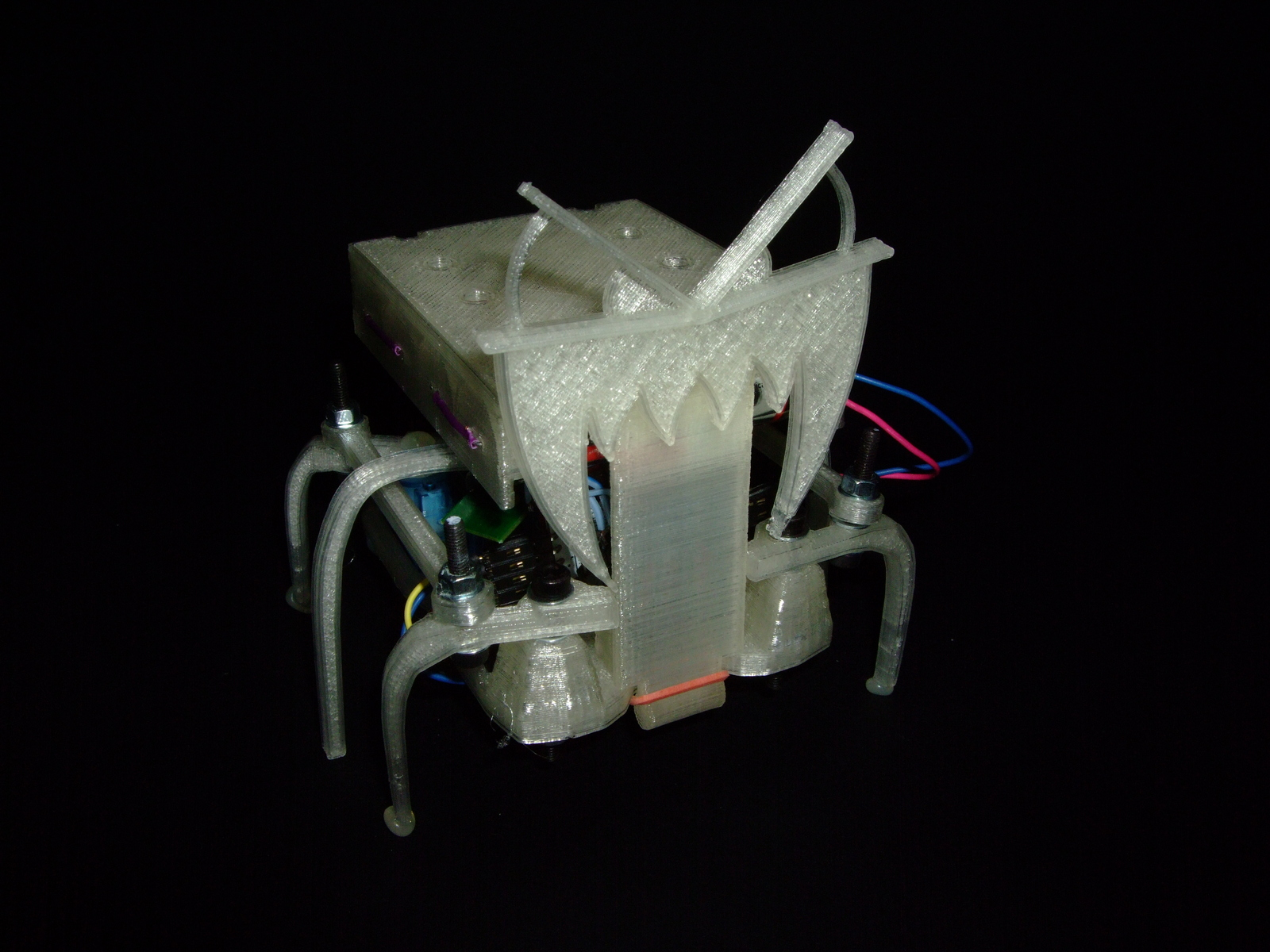
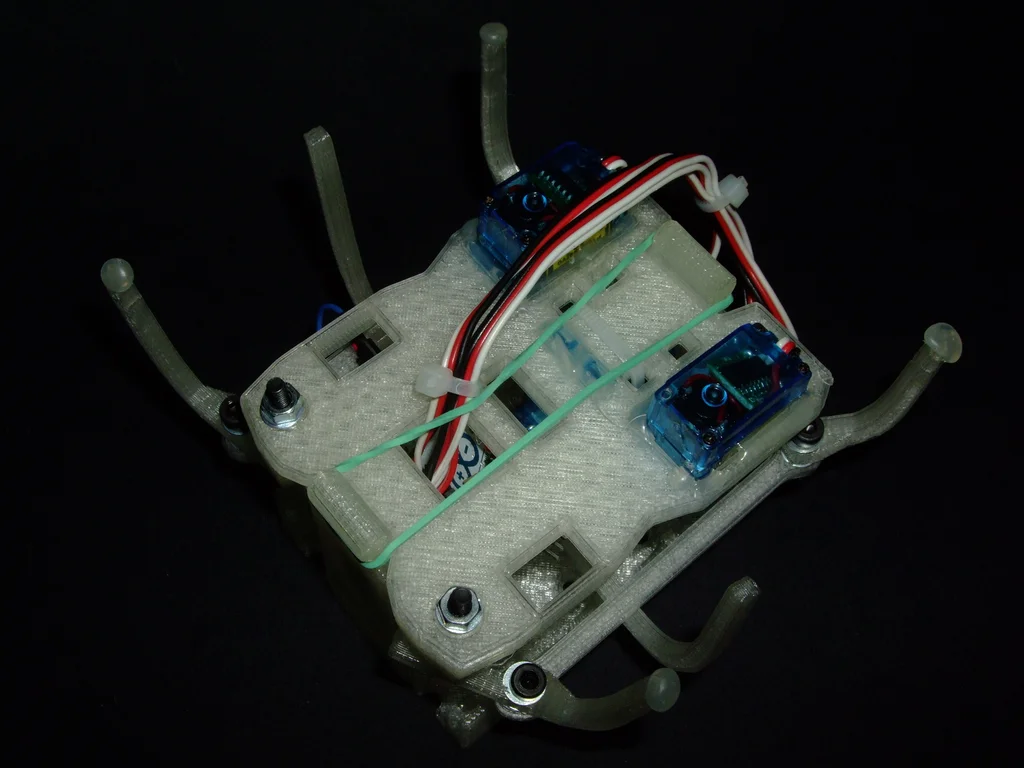
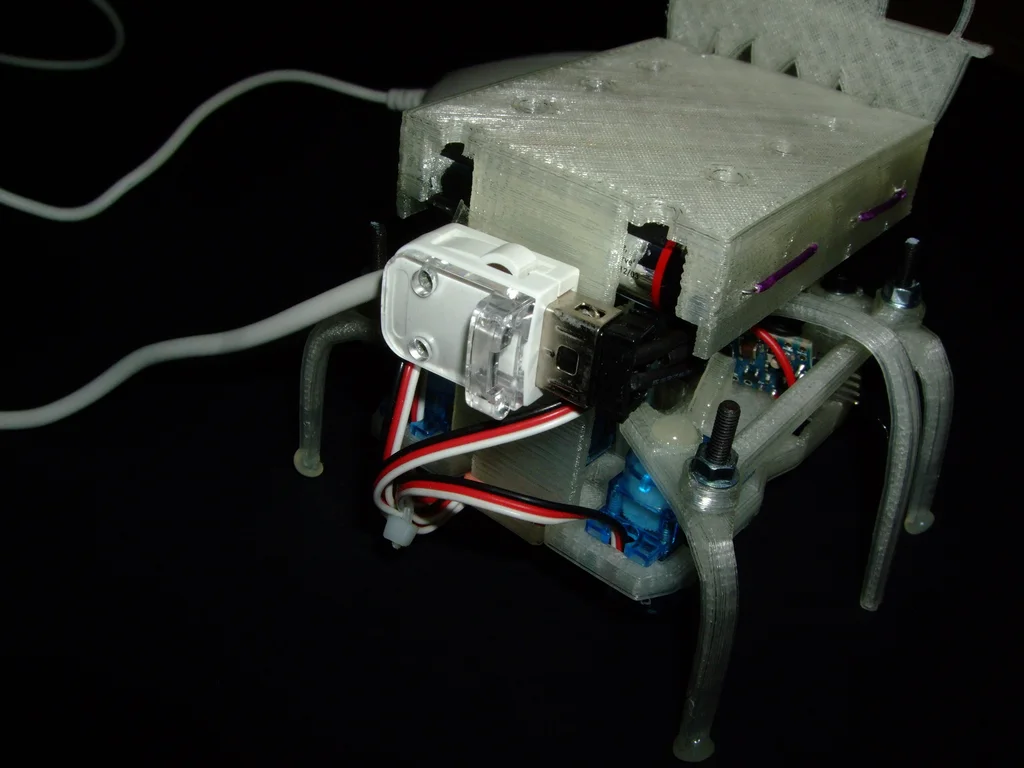
上传后,组装所有部件:将电池座放在板的顶部。你可以简单地用橡皮筋挡住它!
附件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-69hxNlqx-1656990732687)(https://content.instructables.com/static/image/file.default.gif)]Hexapoduino.zip
第 5 步:作为光追随者的六足动物
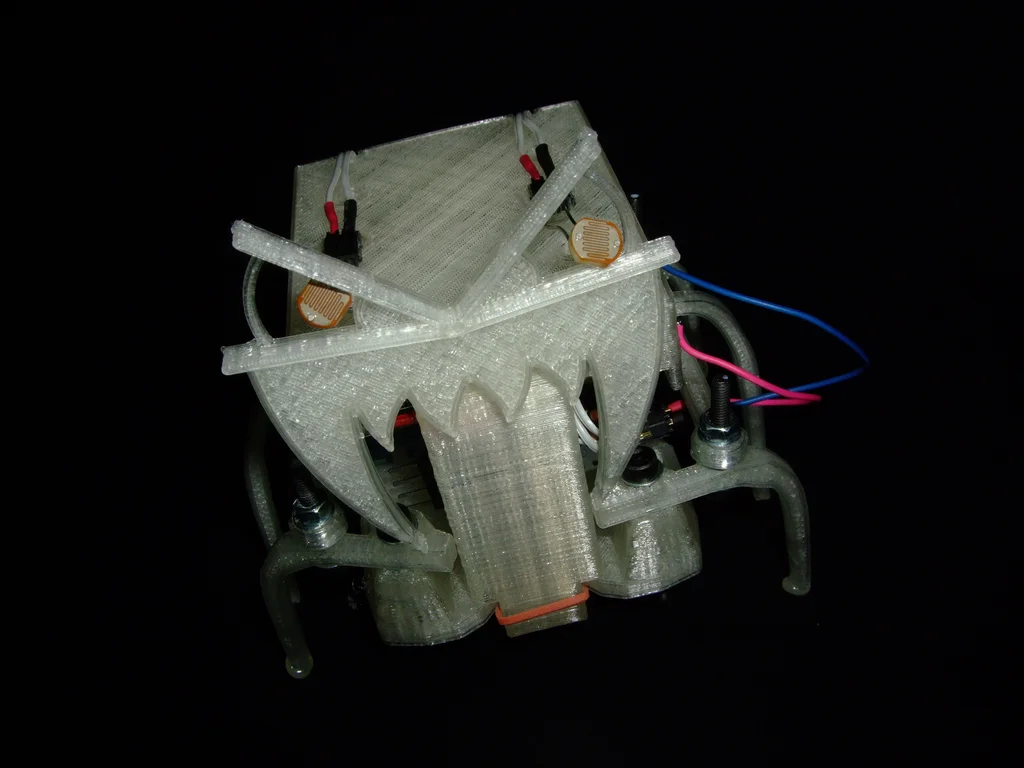
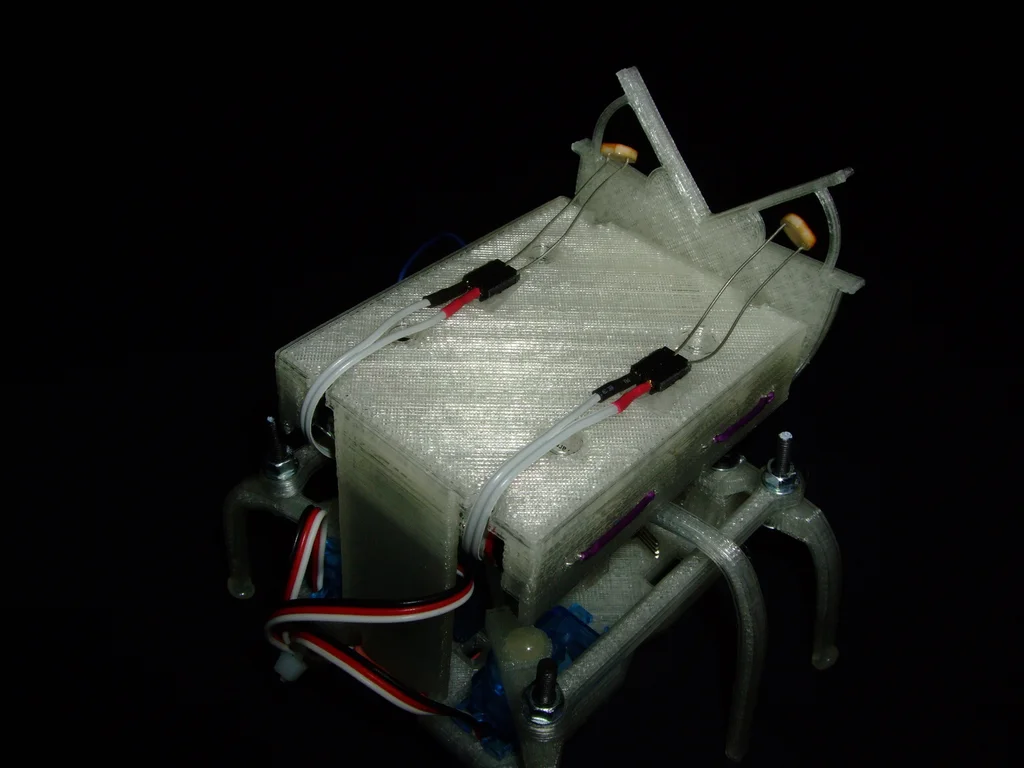
对于此步骤,您需要:
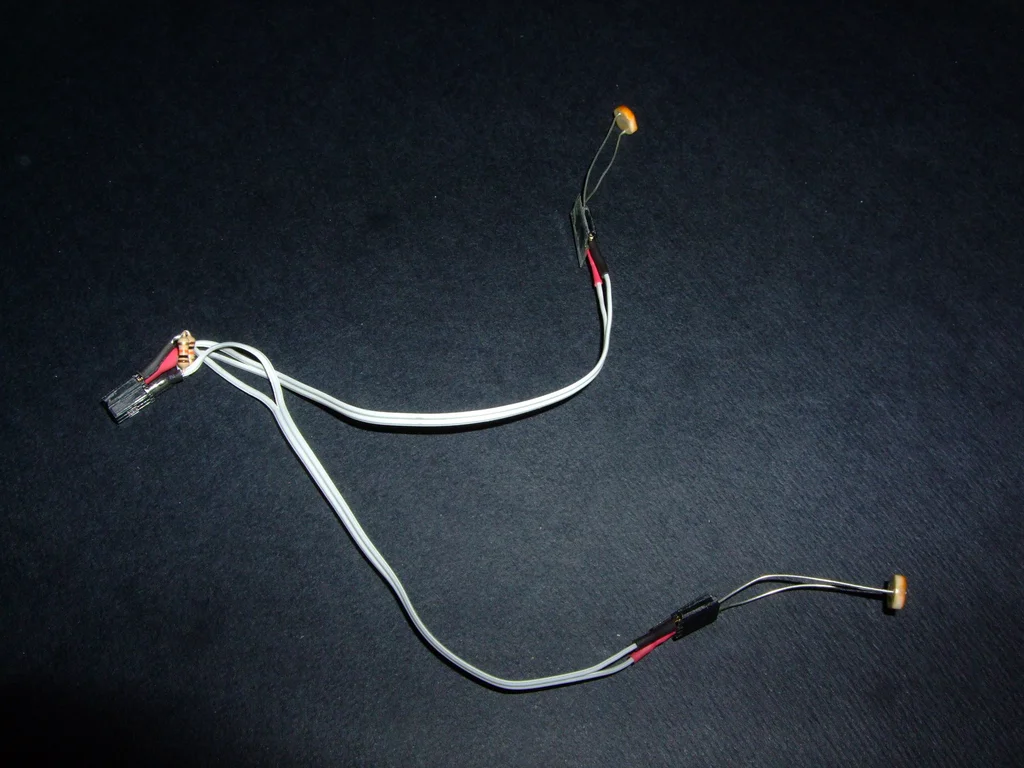
- 2x LDR
- 2x 10K 电阻
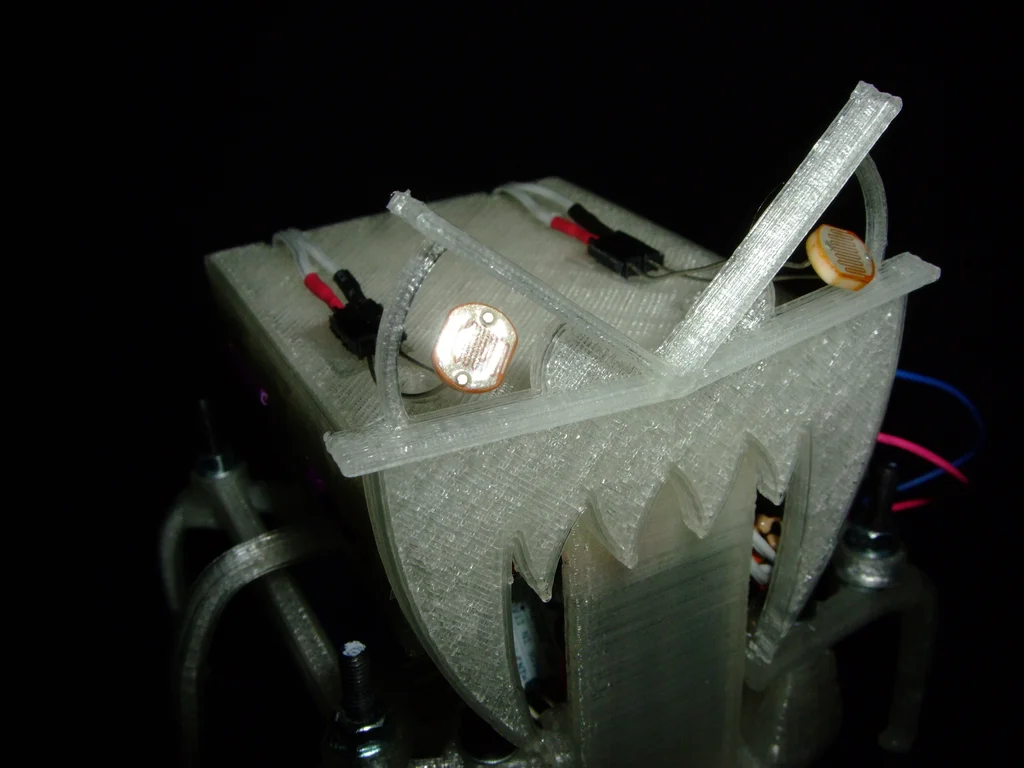
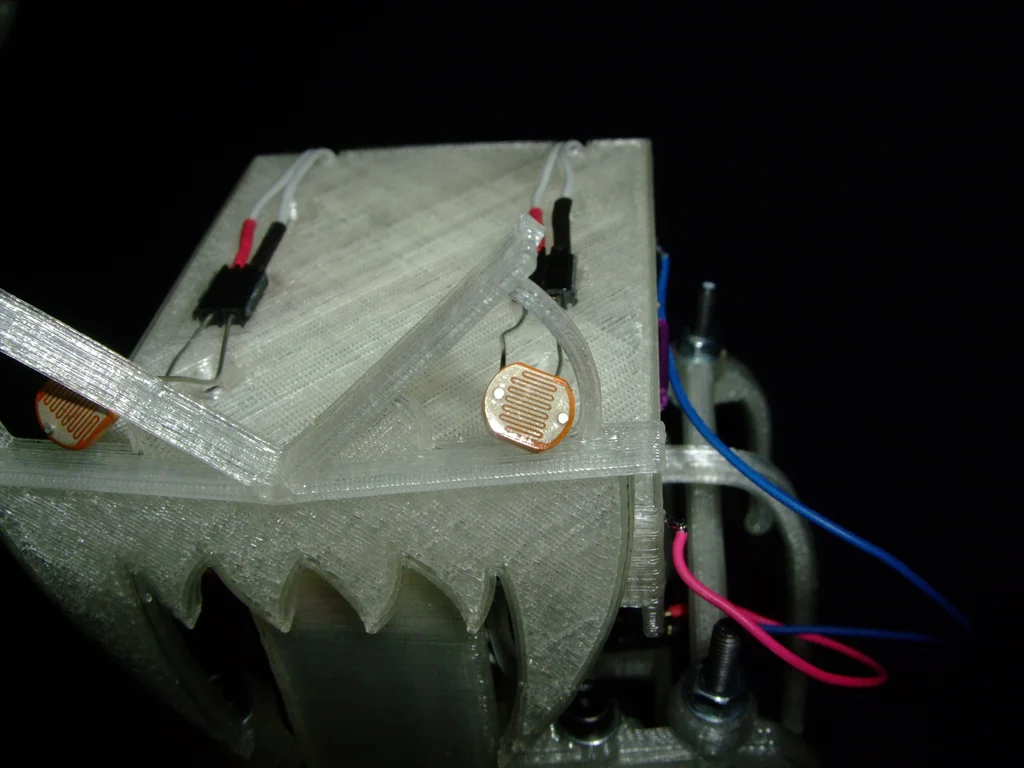
连接非常简单,您可以查看随附的架构(LDR 连接)。可以将 2 LDR 固定在六足机器人的顶部,以尽可能提供更多的光线。
如果你在你的六足动物前面点一盏灯,它会开始增加它的速度。如果您将灯指向左侧 LDR,它将向左转。如果您将灯指向右侧的 lDR,它将向右转。 如果您覆盖 LDR,则六足位移台将停止。
您可以在图像中看到一个怪物头:)
这个“面具”是基于 https://www.thingiverse.com/thing:4412
第 6 步:使用Nunchuk驱动您的六足动物
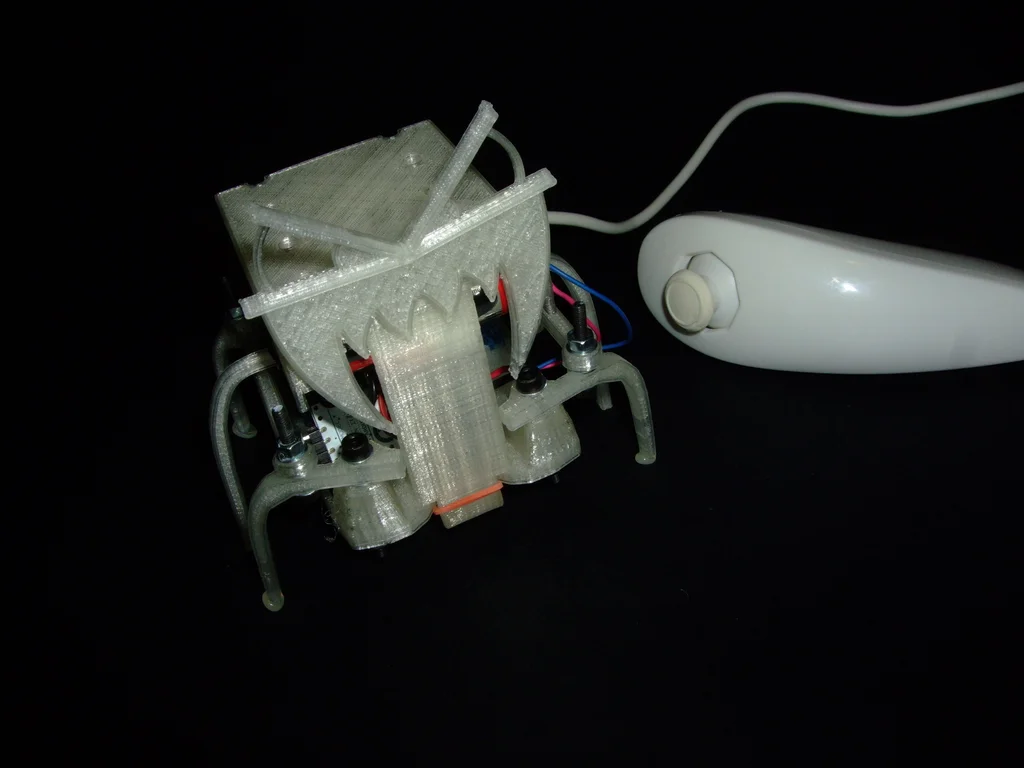

对于此步骤,您需要:
- 1x nunchuk
- 1x nunchuk 适配器(您可以购买或从旧/损坏的 wiimote 中移除)
- 1x 10K 电阻
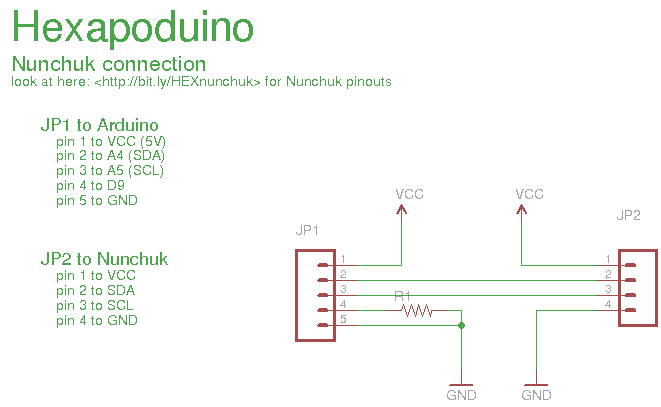
连接非常简单,您可以查看随附的架构(Nunchuk 连接)。
我重用了一个旧的和损坏的 WiiMote 的连接器。Arduino 使用 GND 和引脚 D9 之间的 10K 电阻来“看到”有一个 Nunchuk 连接(如果您查看 skcteh,您可以理解如何!)。您可以使用Nunchuk 顶部的操纵杆驾驶您的 Hexapod 。C按钮增加速度,Z按钮减少速度
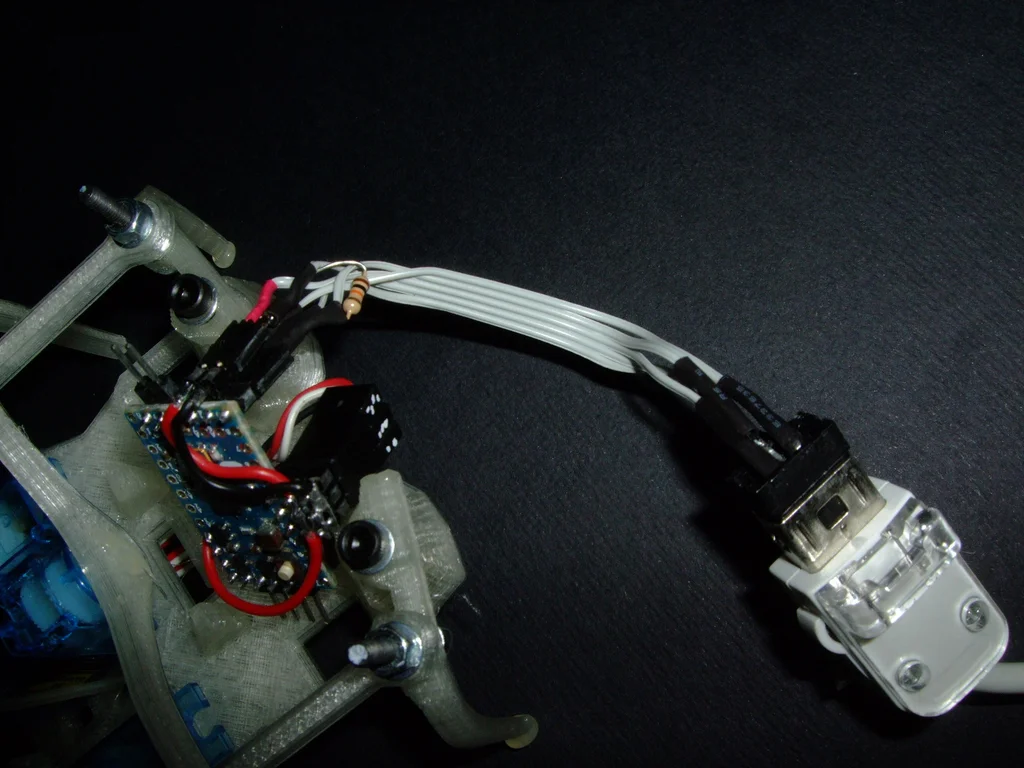
第 7 步:通过蓝牙驱动您的 Hexapod!
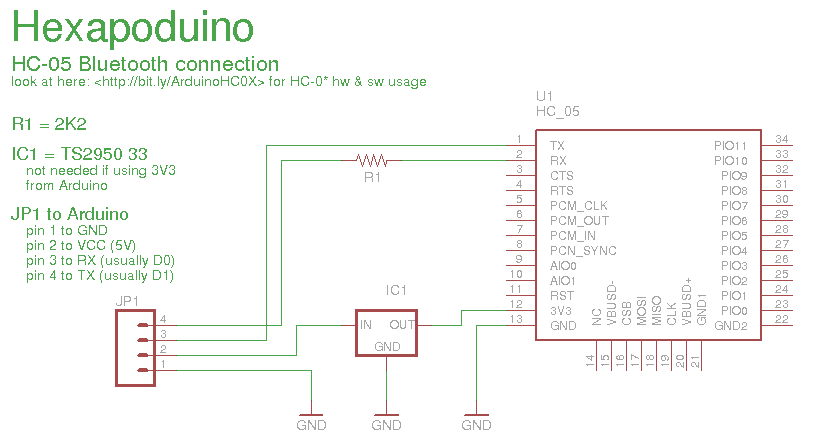
对于此步骤,您需要:
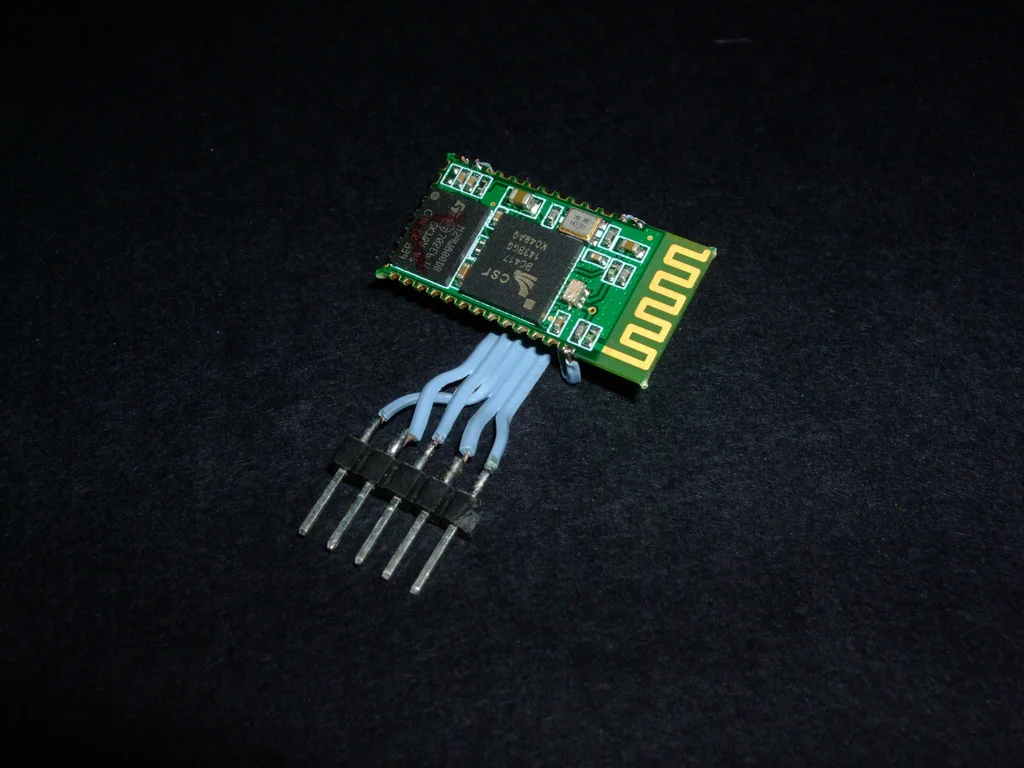
- 1x HC-05(或兼容)蓝牙模块
- 1x 2K2 电阻器
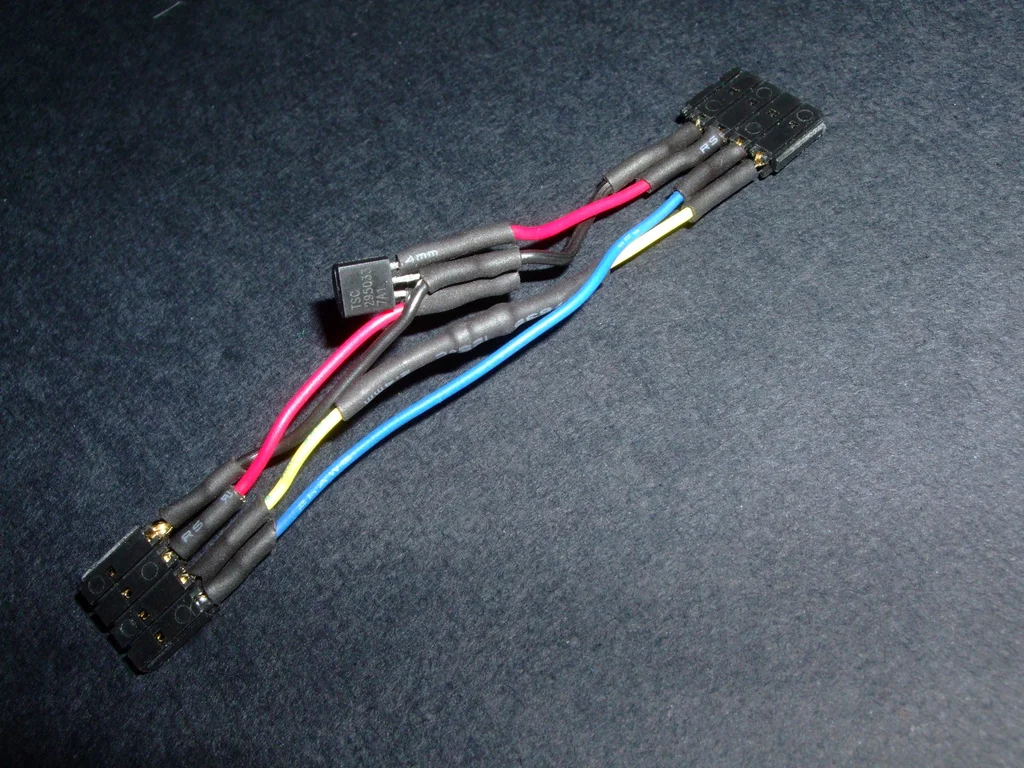
- 1x TS2950 33(或兼容)稳压器
要了解什么是HC-05蓝牙模块,以及如何工作,您可以查看我的指南大约 1 年前发表在 Arduino 论坛:http:
//forum.arduino.cc/index.php?topic=104903.0
有 3 个主要部分:
- 硬件连接
- AT 编程
- bt 串行通信。
问题是指南是意大利语的:) 但是有很多图片和代码。
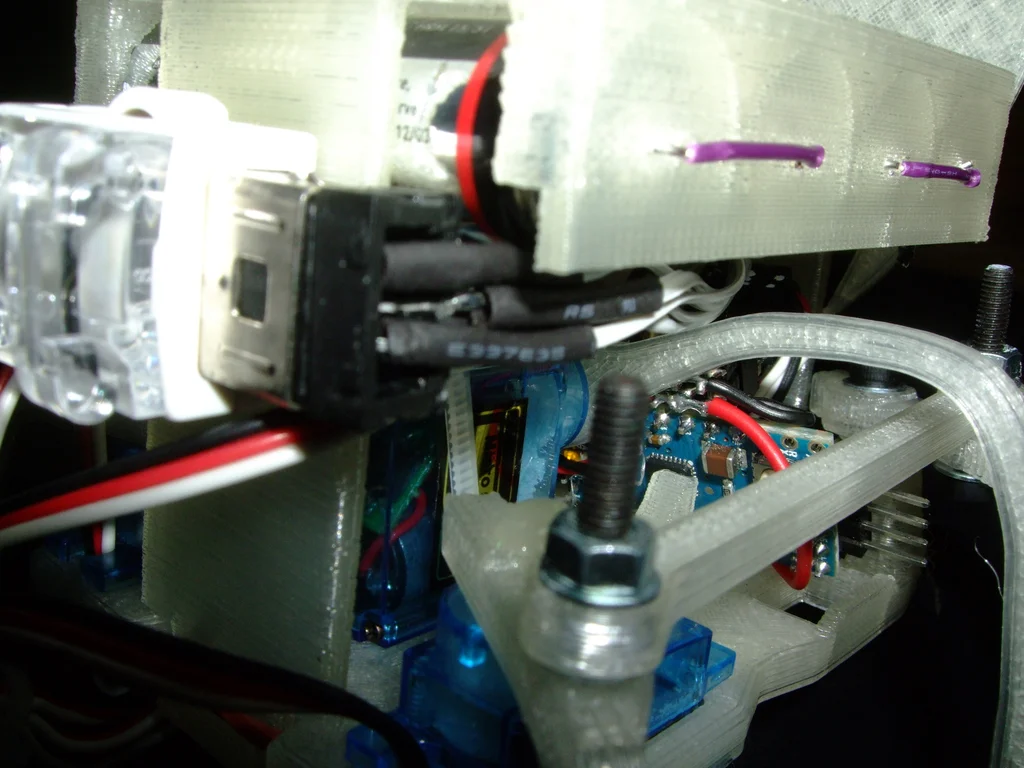
无论如何,连接很简单,您可以查看附加的架构(HC-05 连接)。您需要此模块作为Slave工作,并且 UART 速度为bps 38400。
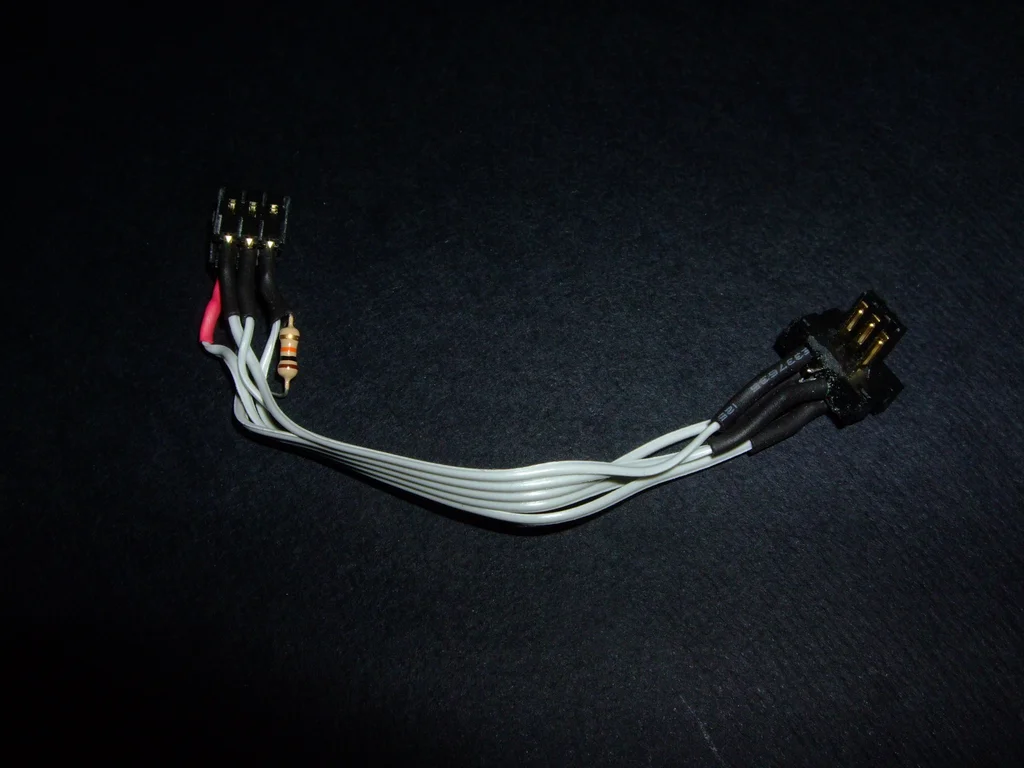
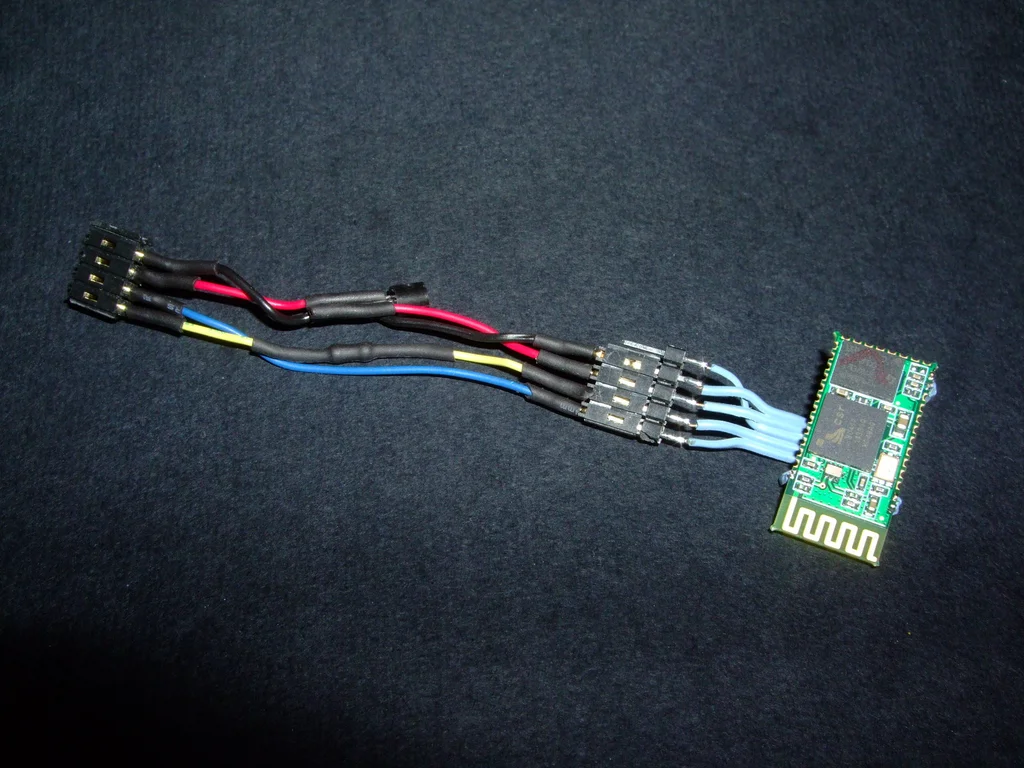
我根据架构中描述的连接制作了一个**连接器。**我可以将 BT 模块连接到一端,将 Arduino Mini 上的接头连接到另一端。
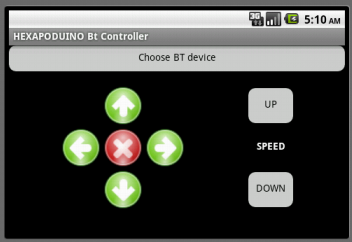
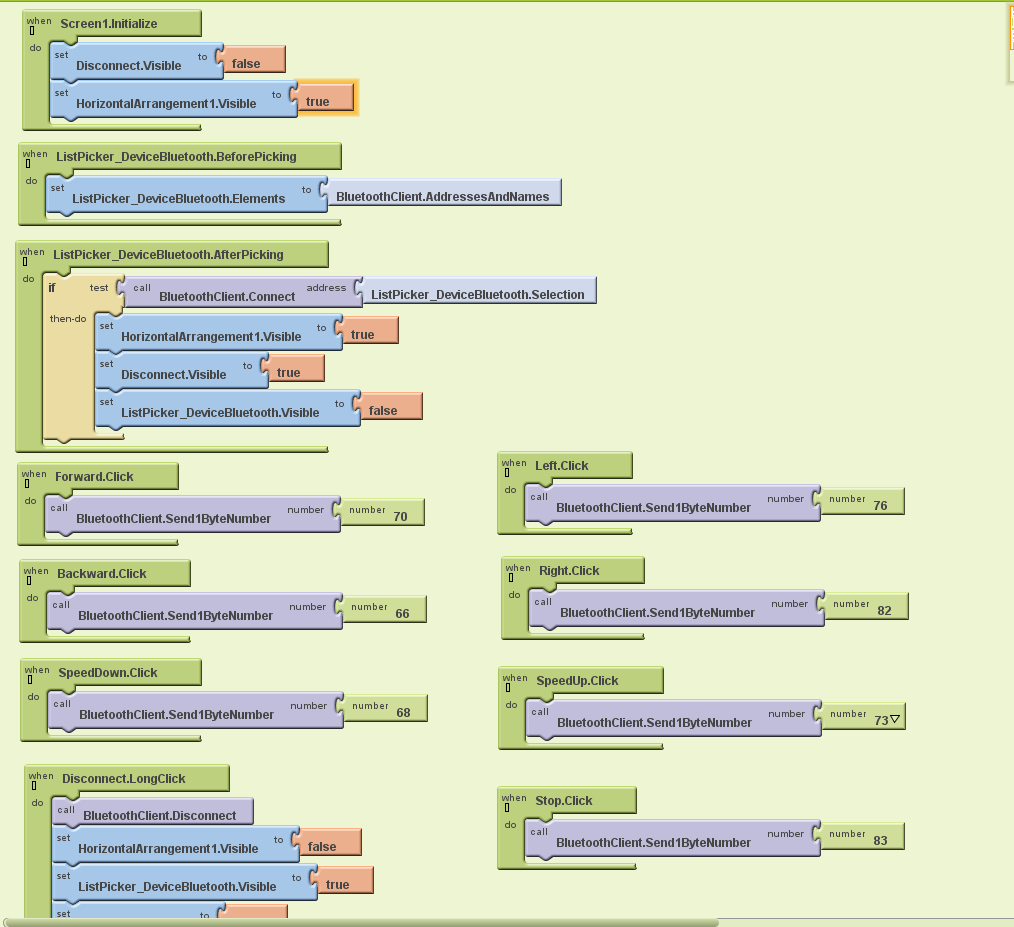
我开发了一个在 Android < 4.2 上运行的简单应用程序。
我使用了 AppInventor:http /beta.appinventor.mit.edu/,这是一个非常特殊且简单的开发环境,由 MIT 维护!
我在此处附上了前端的图像(此处在模拟器中运行)和后端的 2 图像(您还可以看到代码块编程!)。
我还附上了应用程序的来源:您需要一个 AppInventor 帐户(免费)来上传和使用它!
附件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RfOqX2H3-1656990732690)(https://content.instructables.com/static/image/file.default.gif)]HEXAPODUINO.zip
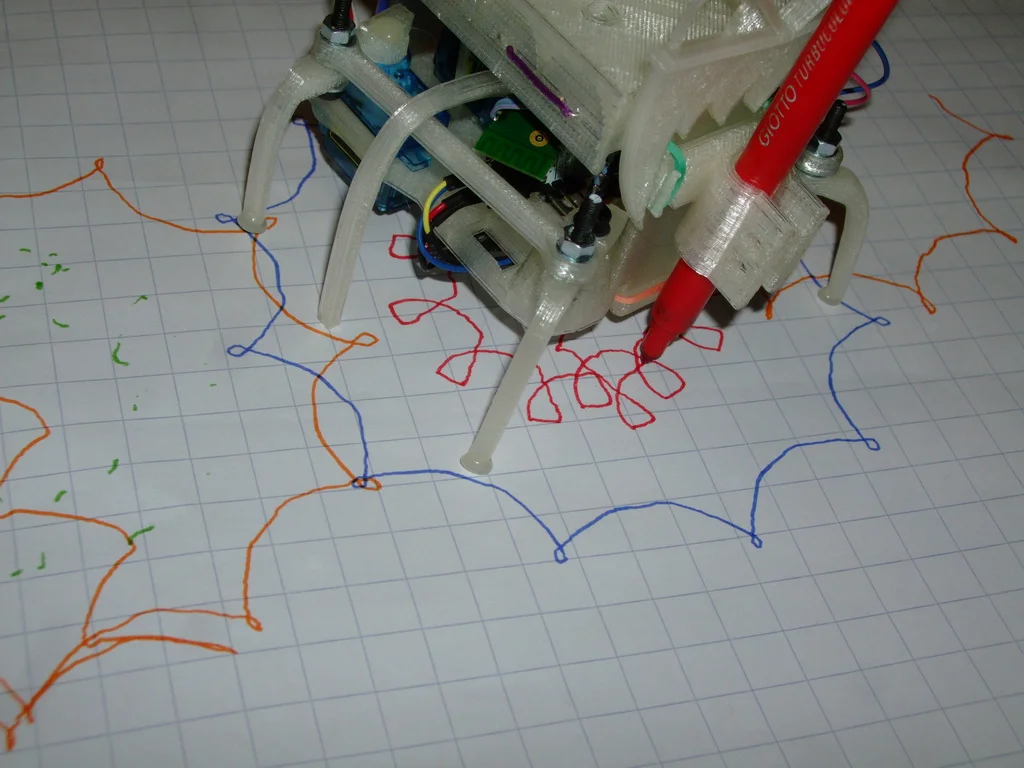
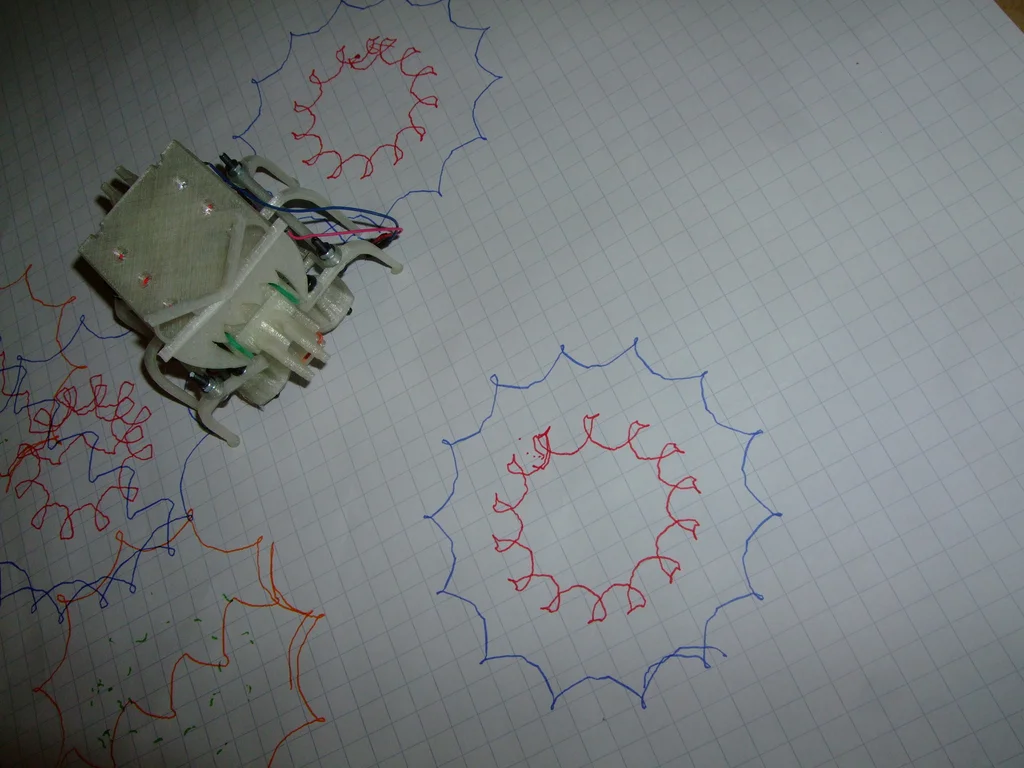
第 8 步:六足动物绘画!
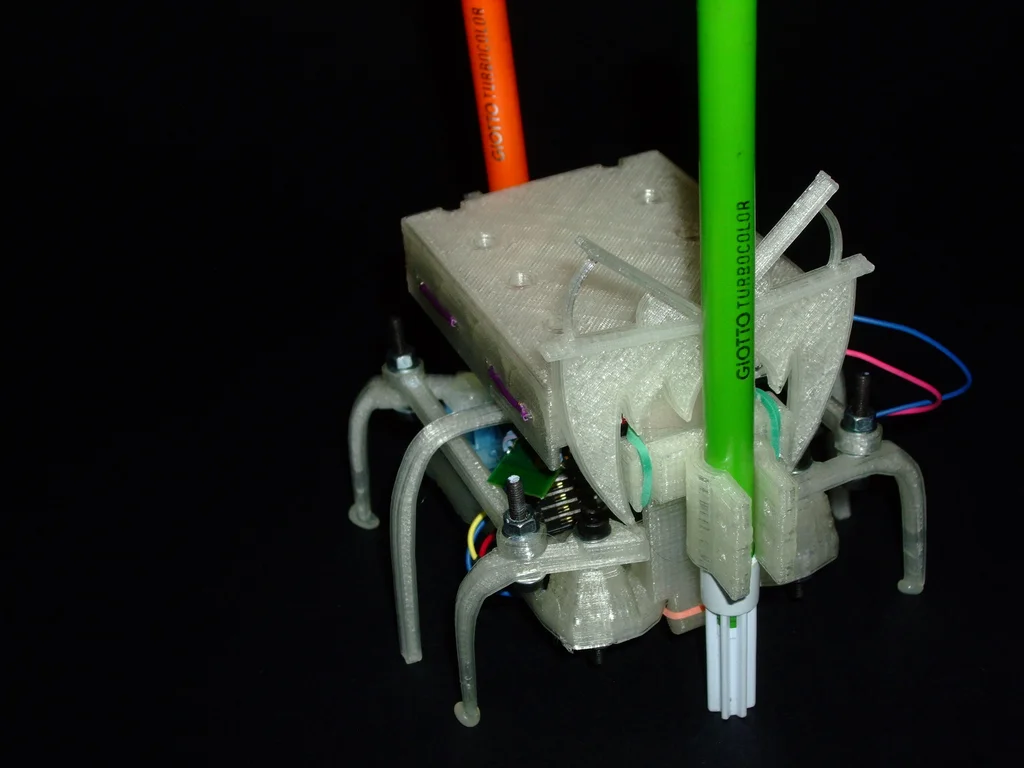
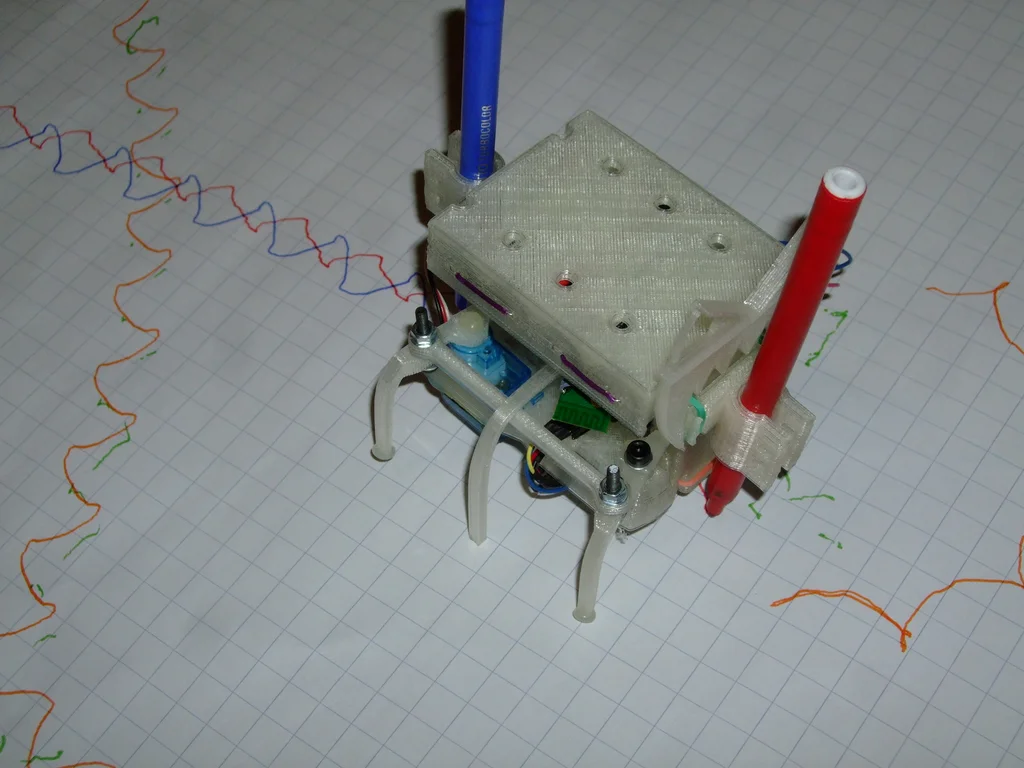
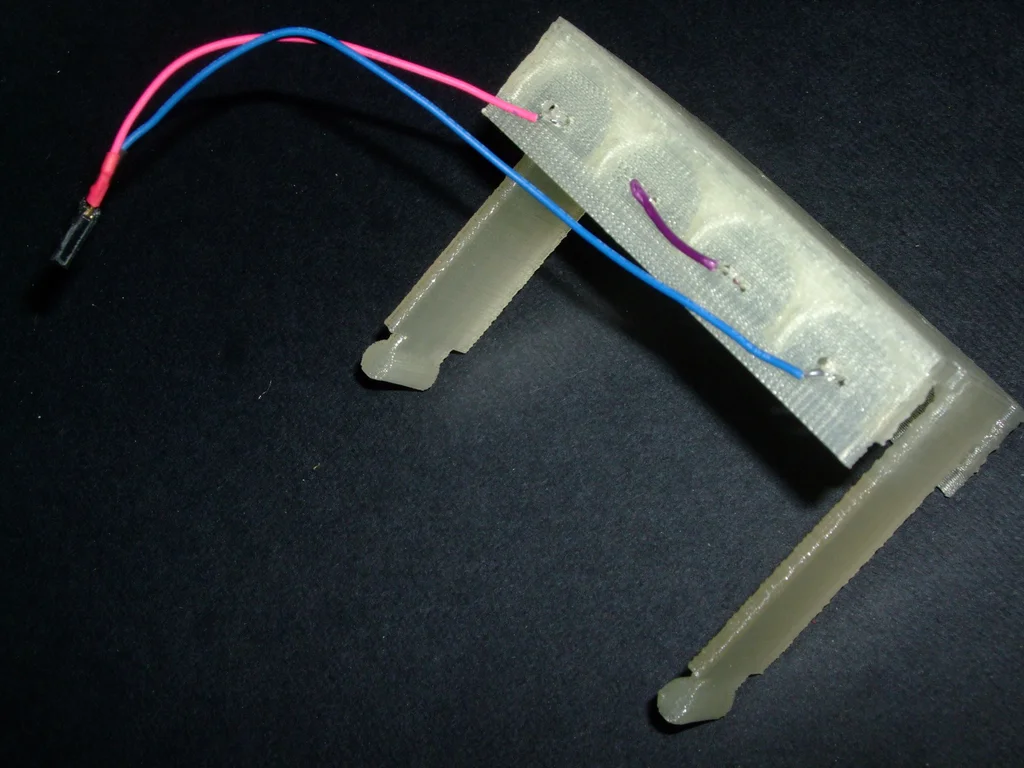
对于这最后一步,您需要 笔架。
这些笔架是(由我设计的 )完美地安装在电池架的支架上。
http://www.thingiverse.com/thing:110331
您可以使用橡胶固定它们。然后你只需要安装 1 支(前)或 2 支钢笔(前后),让六足自由移动,再次移动和转动等等。六足运动是摆动的,所以图纸很特别!
这里有一个视频:
http /www.youtube.com/watch?v=dJFALt1IaJI
更多照片和视频可在我的 g+ 画廊中找到:http :
//bit.ly/HexapodUP
我已经在Arduino Contest 和Remote Control Contest中输入了这个教程。
如果您喜欢这篇文章,请投票!
六足仿生机器人原理解析
六足仿生机器人原理解析及实物设计 - 全文 - 工业控制 - 电子发烧友网 (elecfans.com)
一 研究目的
人类对于外太空探险的欲望从未间断过,因此,如何在不危害人类生命的前提下,挑选先遣部队之探险员,值得深思。近年来有相当多的探讨两足至多足机器人的在外太空的应用,过去两足机器人多为转型机械系统,其运动局限于二维平面,无法克服许多山区崎岖的地形。六足机器人具有跨障能力,可以克服崎岖的地形,且机器人比人类更能承受苛刻的工作环境,因此可以运用在许多危险的工作,例如火山的研究或其他星球的探测等。
在国外已由很多学者深入探讨过可移动式机器人的设计与改进。一般的移动式机器人的移动方式可分为轮形、足形。在足形移动式方面有分为两足、四足、六足和多足机器人,另外还有蛇形移动机器人。
无论在静止或行走,六足机器人的移动较具灵活性变化,但其步行控制需要有良好的控制与规划,六足机器人较不受地形限制,可四处移动是探索未知环境的一项利器,更是良好的研究题材。
二 系统总体方案
六足仿生机器人分为机器人模块和无线遥控模块两个大部分。他们的组成框图如下图所示。两个模块都是以PIC32单片机为控制核心,通过在2.8寸的TFT屏上模拟出按键控制机器人实现各种功能。

图1、六足机器人模块

图2、无线遥控模块
三 硬件设计
3.1 机器人的步态研究
a.前进步态(黑椭圆代表该脚着底,空心椭圆代表没着地)


图3、 初始状态 图4、第一组的三只脚抬起来


图5、第一组三只脚前移 图6、第二组三只脚抬起来


图7、第一组的三只脚利用对地 图8、第二组的三只脚着地
摩擦力将来身体前移,第二组的三只脚前移

图9、第二组的三只脚利用对地摩擦力将身体前移,第一组的三只脚前移,然后从图4
开始重复执行,实现机器人的进退步态。
注意:为了让机器人能够直线运动,必须让每只脚的前进距离必须相同。
b.拐弯步态

图10、初始状态 图11、第一组的三只脚抬起来

图12、第一组的三只脚拐弯并踩到 图13、第一组的三只脚利用对地的摩擦
地面上,然后第二组的三只脚抬起来 力使机器人拐弯一定角度,第二组的三只脚拐一定角度

图14、第一组的三只脚抬起来, 图15、第二组的三只脚利用对地
第二组的三只脚着地 的摩擦力使机器人拐弯一定角度,第一组 的三 只脚拐一定角度

图16、第二组的三只脚抬起来,第一组的三
只脚着地,然后从图13开始重复执行
注意:该结构每次拐弯的最大角度为30度,拐弯的最小角度为1度。所以通过程序可以设置拐弯角度1到255度的任意拐弯。
边栏推荐
- Huiyuan, 30, is going to have a new owner
- Xiao Sha's arithmetic problem solving Report
- 如何将 DevSecOps 引入企业?
- Fundamentals of data communication - Principles of IP routing
- mapper.xml文件中的注释
- Appium自动化测试基础 — APPium基础操作API(二)
- Creation and optimization of MySQL index
- Bugku's steganography
- Basic JSON operations of MySQL 5.7
- 当代人的水焦虑:好水究竟在哪里?
猜你喜欢
Summary of the third class
Misc Basic test method and knowledge points of CTF
Ten billion massage machine blue ocean, difficult to be a giant

你童年的快乐,都是被它承包了
MySQL 巨坑:update 更新慎用影响行数做判断!!!

I spring and autumn blasting-2
How can I quickly check whether there is an error after FreeSurfer runs Recon all—— Core command tail redirection

"Sequelae" of the withdrawal of community group purchase from the city
当代人的水焦虑:好水究竟在哪里?
Thymeleaf uses background custom tool classes to process text
随机推荐
可转债打新在哪里操作开户是更安全可靠的呢
Redis' transaction mechanism
Maximum common subsequence
Good article inventory
如何将 DevSecOps 引入企业?
Data communication foundation OSPF Foundation
Magic methods and usage in PHP (PHP interview theory questions)
记录一下树莓派搭建环境中遇到的坑。。。
Huawei Hubble incarnation hard technology IPO harvester
Summary of the second lesson
MySQL5.7的JSON基本操作
Misc Basic test method and knowledge points of CTF
The computer is busy, and the update is a little slow
Virtual base class (a little difficult)
Reasons and solutions for redis cache penetration and cache avalanche
ICML 2022 | 探索语言模型的最佳架构和训练方法
Bugku telnet
F. Weights assignment for tree edges problem solving Report
Appium automation test foundation - appium basic operation API (I)
超越PaLM!北大碩士提出DiVeRSe,全面刷新NLP推理排行榜