当前位置:网站首页>[slam] orb-slam3 parsing - track () (3)
[slam] orb-slam3 parsing - track () (3)
2022-07-06 03:20:00 【iwander。】
After building the latest frame Frame after , Begin SLAM Main course Tracking It's the process . This function is very long , There's a lot of if-else It's very annoying .Track() What did you do ?
First turn on the active map To find out ; then IMU Preintegration Not yet , It needs to be supplemented here ; Next, you have to decide whether to track the map creation state normally or the initialization state , If not initialized, go initialization ; If initialized , to Inter frame matching , That is, the initial value of the current frame pose is obtained by short-term data association , First try and Adjacent frames match , No, just the latest Key frame matching , Not yet relocation , If you still can't, open a new map and run the odometer again ; then and local Map matching , That is, the mid-term data association makes the pose more accurate . Whether it's with the previous frame , Match with key frame or local map , Although the details are different , But I've been looking for something , Find a match , Optimize the pose 3 Stride . Last , if necessary establish KeyFrame Words , Then create a .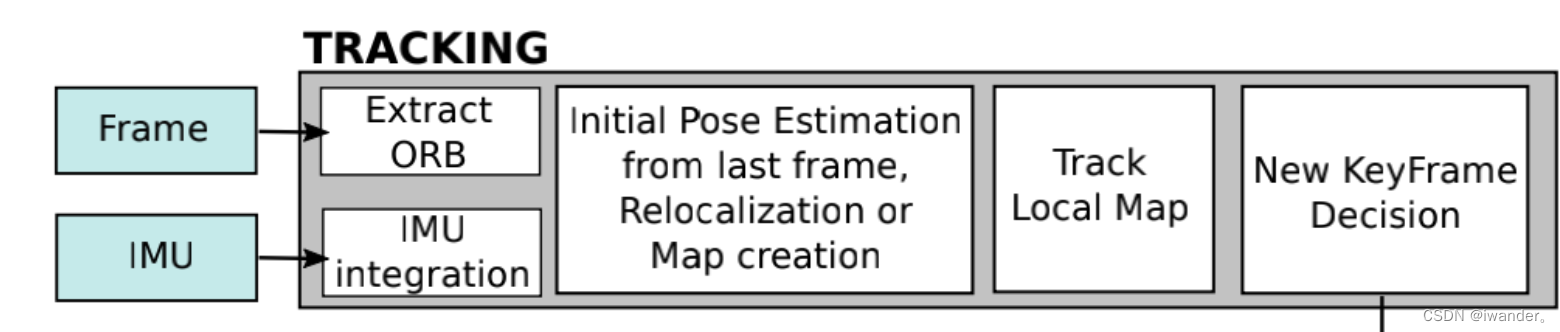
Let's take a look at the classic flow chart in the paper ( part ), Include :Frame->Extract ORB Corresponding Frame The construction of ( See link ),IMU integration( see 3.1); Next, find the current frame pose Initial value of , Corresponding to the short-term data association of the paper , By matching with the previous frame ( see 3.3) Or match with the latest key frame ( see 3.2) Realization ; Next is Track Local Map( see 3.5)
Improve pose accuracy , Corresponding to the interim data association of the paper ; Finally, increase KeyFrame 了 ( see 3.6).
Step1: obtain Altas Multi graph system active map
First use pCurrentMap The pointer handles active map Take it out , without , then CreateMapInAtlas() perhaps mpSystem->ResetActiveMap().
Map* pCurrentMap = mpAtlas->GetCurrentMap();
if(mState!=NO_IMAGES_YET)
{
// The timestamp is out of order
if(mLastFrame.mTimeStamp>mCurrentFrame.mTimeStamp)
{
unique_lock<mutex> lock(mMutexImuQueue);
mlQueueImuData.clear();
CreateMapInAtlas();
return;
}
// The timestamp is not disordered
else if(mCurrentFrame.mTimeStamp>mLastFrame.mTimeStamp+1.0)
{
if(mpAtlas->isInertial())
{
if(mpAtlas->isImuInitialized())
{
if(!pCurrentMap->GetIniertialBA2()) mpSystem->ResetActiveMap();
else CreateMapInAtlas();
}
else mpSystem->ResetActiveMap();
return;
}
}
}Step2:IMU Preintegration
mCurrentFrame.SetNewBias(mpLastKeyFrame->GetImuBias());
PreintegrateIMU();Step3: initialization
if(mState==NOT_INITIALIZED)
{
if(mSensor==System::STEREO || mSensor==System::RGBD || mSensor==System::IMU_STEREO || mSensor==System::IMU_RGBD) StereoInitialization();
else MonocularInitialization();
if(mState!=OK) // If rightly initialized, mState=OK
{
mLastFrame = Frame(mCurrentFrame);
return;
}
if(mpAtlas->GetAllMaps().size() == 1) mnFirstFrameId = mCurrentFrame.mnId;
}Step4:( Between adjacent frames ) Short term data matching acquisition pose initial value
This blog skips the pure positioning mode , Let's look at the positioning + Drawing (!mbOnlyTracking) The pattern of . stay 【SLAM】ORB-SLAM3 analysis —— review (1) When introducing the paper , We remember ORB-SLAM3 One of the main characteristics of ① Short term data matching ,② Interim data matching and ③ Long term data matching , This part corresponds to short-term data matching , That is to use the feature matching relationship between adjacent frames to obtain the pose of the latest frame . Of course, the error here is great , So it can only be used as the current frame pose Initial value of .
// Initial camera pose estimation using motion model or relocalization (if tracking is lost)
if(!mbOnlyTracking)
{
...
}This part encounters 3 In this case , Namely mState very OK, Just lost , I lost it , Let's have a look at :
(1) situation 1: State very OK(mState==OK)
// State OK
// Local Mapping is activated. This is the normal behaviour, unless you explicitly activate the "only tracking" mode.
if(mState==OK)
{
// Local Mapping might have changed some MapPoints tracked in last frame
// to update Local Mapping Inside MapPoints
CheckReplacedInLastFrame();
if((!mbVelocity && !pCurrentMap->isImuInitialized()) || mCurrentFrame.mnId<mnLastRelocFrameId+2)
{
// If There is no inter frame speed and the current frame IMU Not initialized , Or just finished relocating , Then with KeyFrame Match between frames
bOK = TrackReferenceKeyFrame();
}
else
{
// First match a wave with a constant speed model , If you fail, you have to pay back TrackReferenceKeyFrame()
bOK = TrackWithMotionModel();
if(!bOK) bOK = TrackReferenceKeyFrame();
}
// If TrackReferenceKeyFrame() and TrackWithMotionModel() It's not done
if (!bOK)
{
//VI In mode , If it has just been repositioned, it has not been long , At this time, I can track failures , That's really hopeless
if ( mCurrentFrame.mnId<=(mnLastRelocFrameId+mnFramesToResetIMU) &&
(mSensor==System::IMU_MONOCULAR || mSensor==System::IMU_STEREO || mSensor == System::IMU_RGBD))
{
mState = LOST;
}
// If the current frame is map There's a lot of KeyFrames, It can also be rescued
else if(pCurrentMap->KeyFramesInMap()>10)
{
mState = RECENTLY_LOST;
mTimeStampLost = mCurrentFrame.mTimeStamp;
}
// Not saved ,8BQ 了
else mState = LOST;
}
}(2) situation 2: Just lost , You can also rescue (mState==RECENTLY_LOST)
else if (mState == RECENTLY_LOST)
{
Verbose::PrintMess("Lost for a short time", Verbose::VERBOSITY_NORMAL);
bOK = true;
if((mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD))
{
//VI In mode , use IMU Data rescue wave
if(pCurrentMap->isImuInitialized()) PredictStateIMU();
else bOK = false;
if (mCurrentFrame.mTimeStamp-mTimeStampLost>time_recently_lost)
{
mState = LOST;
Verbose::PrintMess("Track Lost...", Verbose::VERBOSITY_NORMAL);
bOK=false;
}
}
else
{
//Visual In mode ,Relocalization
bOK = Relocalization();
if(mCurrentFrame.mTimeStamp-mTimeStampLost>3.0f && !bOK)
{
mState = LOST;
Verbose::PrintMess("Track Lost...", Verbose::VERBOSITY_NORMAL);
bOK=false;
}
}
}(3) situation 3: I lost it , Reopen this one (mState==LOST)
else if (mState == LOST)
{
Verbose::PrintMess("A new map is started...", Verbose::VERBOSITY_NORMAL);
if (pCurrentMap->KeyFramesInMap()<10)
{
mpSystem->ResetActiveMap();
Verbose::PrintMess("Reseting current map...", Verbose::VERBOSITY_NORMAL);
}else
CreateMapInAtlas();
if(mpLastKeyFrame) mpLastKeyFrame = static_cast<KeyFrame*>(NULL);
Verbose::PrintMess("done", Verbose::VERBOSITY_NORMAL);
return;
}
}Step5:( And local map Of ) Interim data matching makes pose More precise
if(!mCurrentFrame.mpReferenceKF) mCurrentFrame.mpReferenceKF = mpReferenceKF;
if(bOK) bOK = TrackLocalMap();
if(bOK) mState = OK;
else if (mState == OK)
{
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
{
Verbose::PrintMess("Track lost for less than one second...", Verbose::VERBOSITY_NORMAL);
if(!pCurrentMap->isImuInitialized() || !pCurrentMap->GetIniertialBA2())
{
mpSystem->ResetActiveMap();
}
mState=RECENTLY_LOST;
}
else mState=RECENTLY_LOST; // visual to lost
mTimeStampLost = mCurrentFrame.mTimeStamp;
}Step6: Update every few frames IMU Preintegration
// Save frame if recent relocalization, since they are used for IMU reset (as we are making copy, it should be once mCurrFrame is completely modified)
if((mCurrentFrame.mnId<(mnLastRelocFrameId+mnFramesToResetIMU)) && (mCurrentFrame.mnId > mnFramesToResetIMU) &&
(mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD) && pCurrentMap->isImuInitialized())
{
// TODO check this situation
Verbose::PrintMess("Saving pointer to frame. imu needs reset...", Verbose::VERBOSITY_NORMAL);
Frame* pF = new Frame(mCurrentFrame);
pF->mpPrevFrame = new Frame(mLastFrame);
// Load preintegration
pF->mpImuPreintegratedFrame = new IMU::Preintegrated(mCurrentFrame.mpImuPreintegratedFrame);
}
if(pCurrentMap->isImuInitialized())
{
if(bOK)
{
// every mnFramesToResetIMU The frame is about ResetFrameIMU() once
if(mCurrentFrame.mnId==(mnLastRelocFrameId+mnFramesToResetIMU))
{
ResetFrameIMU();
}
// If the current frame's idx and mnLastRelocFrameId Far away , that mLastBias It should be the current frame bias
else if(mCurrentFrame.mnId>(mnLastRelocFrameId+30))
mLastBias = mCurrentFrame.mImuBias;
}
}Step7: Save the speed of the constant speed model
That is, the relative pose of the current frame and the previous frame , In the next cycle, multiply the relative pose by the pose of the previous frame to find the pose of the latest frame . Be careful Step7-10 All in the same if Inside .
if(bOK || mState==RECENTLY_LOST)
{
// Update motion model
if(mLastFrame.isSet() && mCurrentFrame.isSet())
{
Sophus::SE3f LastTwc = mLastFrame.GetPose().inverse();
mVelocity = mCurrentFrame.GetPose() * LastTwc;
mbVelocity = true;
}
else mbVelocity = false;Step8: Empty the containers for storing matching data and temporary road marking containers
// Clean VO matches
for(int i=0; i<mCurrentFrame.N; i++)
{
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
if(pMP)
if(pMP->Observations()<1)
{
mCurrentFrame.mvbOutlier[i] = false;
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
}
}
// Delete temporal MapPoints
for(list<MapPoint*>::iterator lit = mlpTemporalPoints.begin(), lend = mlpTemporalPoints.end(); lit!=lend; lit++)
{
MapPoint* pMP = *lit;
delete pMP;
}
mlpTemporalPoints.clear();Step9: Create keyframes
bool bNeedKF = NeedNewKeyFrame();
// Check if we need to insert a new keyframe
// if(bNeedKF && bOK)
if(bNeedKF && (bOK || (mInsertKFsLost && mState==RECENTLY_LOST &&
(mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD))))
CreateNewKeyFrame();Step10: Clear the outer point in the current frame road punctuation
// We allow points with high innovation (considererd outliers by the Huber Function)
// pass to the new keyframe, so that bundle adjustment will finally decide
// if they are outliers or not. We dont want next frame to estimate its position
// with those points so we discard them in the frame. Only has effect if lastframe is tracked
for(int i=0; i<mCurrentFrame.N;i++)
{
if(mCurrentFrame.mvpMapPoints[i] && mCurrentFrame.mvbOutlier[i])
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
}Step11: If you lose it , Reopen
// Reset if the camera get lost soon after initialization
if(mState==LOST)
{
if(pCurrentMap->KeyFramesInMap()<=10)
{
mpSystem->ResetActiveMap();
return;
}
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
if (!pCurrentMap->isImuInitialized())
{
Verbose::PrintMess("Track lost before IMU initialisation, reseting...", Verbose::VERBOSITY_QUIET);
mpSystem->ResetActiveMap();
return;
}
CreateMapInAtlas();
return;
}Step12: Pass some auxiliary data
if(!mCurrentFrame.mpReferenceKF) mCurrentFrame.mpReferenceKF = mpReferenceKF;
mLastFrame = Frame(mCurrentFrame);
}
if(mState==OK || mState==RECENTLY_LOST)
{
// Store frame pose information to retrieve the complete camera trajectory afterwards.
if(mCurrentFrame.isSet())
{
Sophus::SE3f Tcr_ = mCurrentFrame.GetPose() * mCurrentFrame.mpReferenceKF->GetPoseInverse();
mlRelativeFramePoses.push_back(Tcr_);
mlpReferences.push_back(mCurrentFrame.mpReferenceKF);
mlFrameTimes.push_back(mCurrentFrame.mTimeStamp);
mlbLost.push_back(mState==LOST);
}
else
{
// This can happen if tracking is lost
mlRelativeFramePoses.push_back(mlRelativeFramePoses.back());
mlpReferences.push_back(mlpReferences.back());
mlFrameTimes.push_back(mlFrameTimes.back());
mlbLost.push_back(mState==LOST);
}
}3.1 IMU Preintegration
This part of the reference blog :
https://zhuanlan.zhihu.com/p/374372286
https://blog.csdn.net/qq_39266065/article/details/115703313
https://github.com/electech6/ORB_SLAM3_detailed_comments
https://blog.csdn.net/weixin_37835423/article/details/122370251?spm=1001.2014.3001.5502 recommend
This part involves complex formula derivation , See the reference link above for details .
If the current is the first frame , Or not IMU data , It would be return.
void Tracking::PreintegrateIMU()
{
// Step 1. Get the pre integration data to be processed between two frames , Make a collection
// The previous frame does not exist , It means that there is no imu data , No pre integration
if(!mCurrentFrame.mpPrevFrame)
{
Verbose::PrintMess("non prev frame ", Verbose::VERBOSITY_NORMAL);
mCurrentFrame.setIntegrated();
return;
}
mvImuFromLastFrame.clear();
mvImuFromLastFrame.reserve(mlQueueImuData.size());
// No, imu data , No pre integration
if(mlQueueImuData.size() == 0)
{
Verbose::PrintMess("Not IMU data in mlQueueImuData!!", Verbose::VERBOSITY_NORMAL);
mCurrentFrame.setIntegrated();
return;
}Then, the IMU Take out all the data .
while(true)
{
// Data is not yet available , Will wait for a while , until mlQueueImuData There is imu data . There is no need to wait at first
bool bSleep = false;
{
unique_lock<mutex> lock(mMutexImuQueue);
if(!mlQueueImuData.empty())
{
// Get the first one imu Data as starting data
IMU::Point* m = &mlQueueImuData.front();
cout.precision(17);
// imu The starting data will be earlier than the timestamp of the previous frame of the current frame , If there is a difference 0.001 Then abandon this imu data
if(m->t<mCurrentFrame.mpPrevFrame->mTimeStamp-mImuPer)
{
mlQueueImuData.pop_front();
}
// Also the last one imu The data timestamp can't deal with the redundant time interval of the current frame 0.001
else if(m->t<mCurrentFrame.mTimeStamp-mImuPer)
{
mvImuFromLastFrame.push_back(*m);
mlQueueImuData.pop_front();
}
else
{
// Get the... Between two frames imu Put data in mvImuFromLastFrame in , Get the processing data of the later pre integration
mvImuFromLastFrame.push_back(*m);
break;
}
}
else
{
break;
bSleep = true;
}
}
if(bSleep) usleep(500);
}Carry out median integral processing between two frames . Here we make a special analysis of the beginning and end , It is essentially linear interpolation .
// m individual imu Group data will have m-1 Pre product components
const int n = mvImuFromLastFrame.size()-1;
if(n==0) return;
// structure imu The preprocessor , And initialize the calibration data
IMU::Preintegrated* pImuPreintegratedFromLastFrame = new IMU::Preintegrated(mLastFrame.mImuBias,mCurrentFrame.mImuCalib);
// According to the different positions of pre integration, do different median integration processing
/**
* According to the above imu Frame filtering ,IMU The sequence with the image frame is as follows :
* Frame---IMU0---IMU1---IMU2---IMU3---IMU4---------------IMUx---Frame---IMUx+1
* T_------T0-----T1-----T2-----T3-----T4-----------------Tx-----_T------Tx+1
* A_------A0-----A1-----A2-----A3-----A4-----------------Ax-----_T------Ax+1
* W_------W0-----W1-----W2-----W3-----W4-----------------Wx-----_T------Wx+1
* T_ and _T Represents the timestamp of the previous image frame and the current image frame respectively ,A( Acceleration data ),W( Gyroscope data ), Empathy
*/
for(int i=0; i<n; i++)
{
float tstep;
Eigen::Vector3f acc, angVel;
// The first frame of data, but not the last two frames ,imu The total number of frames is greater than 2
if((i==0) && (i<(n-1)))
{
// Get two adjacent segments imu Time interval of
float tab = mvImuFromLastFrame[i+1].t-mvImuFromLastFrame[i].t;
// Get current imu Time interval to the previous frame
float tini = mvImuFromLastFrame[i].t-mCurrentFrame.mpPrevFrame->mTimeStamp;
// Set the current time imu Acceleration a0, Acceleration at the next moment a1, The time interval tab by t10,tini t0p
// Under normal circumstances, in order to find the previous frame to the current time imu An average acceleration of , however imu Time will not fall at the moment of the last frame , Compensation is needed , Ask for a0 The amount of acceleration change from time to the previous frame
// With this change, add it to a0 After that, you can express the acceleration of the previous frame . among a0 - (a1-a0)*(tini/tab) Add a1 Then divide by 2 It's the average acceleration during this period
// among tstep Express a1 Time interval to the previous frame ,a0 - (a1-a0)*(tini/tab) In this formula tini It can be positive or negative, indicating the sequence of time ,(a1-a0) Is the same , In many cases, this formula still holds
acc = (mvImuFromLastFrame[i].a+mvImuFromLastFrame[i+1].a-
(mvImuFromLastFrame[i+1].a-mvImuFromLastFrame[i].a)*(tini/tab))*0.5f;
// The calculation process is similar to acceleration
angVel = (mvImuFromLastFrame[i].w+mvImuFromLastFrame[i+1].w-
(mvImuFromLastFrame[i+1].w-mvImuFromLastFrame[i].w)*(tini/tab))*0.5f;
tstep = mvImuFromLastFrame[i+1].t-mCurrentFrame.mpPrevFrame->mTimeStamp;
}
else if(i<(n-1))
{
// There is no frame interference in the intermediate data , Normal calculation
acc = (mvImuFromLastFrame[i].a+mvImuFromLastFrame[i+1].a)*0.5f;
angVel = (mvImuFromLastFrame[i].w+mvImuFromLastFrame[i+1].w)*0.5f;
tstep = mvImuFromLastFrame[i+1].t-mvImuFromLastFrame[i].t;
}
// Until the penultimate imu At the moment , The calculation process is similar to the first moment , Both frames and imu The relationship of time
else if((i>0) && (i==(n-1)))
{
float tab = mvImuFromLastFrame[i+1].t-mvImuFromLastFrame[i].t;
float tend = mvImuFromLastFrame[i+1].t-mCurrentFrame.mTimeStamp;
acc = (mvImuFromLastFrame[i].a+mvImuFromLastFrame[i+1].a-
(mvImuFromLastFrame[i+1].a-mvImuFromLastFrame[i].a)*(tend/tab))*0.5f;
angVel = (mvImuFromLastFrame[i].w+mvImuFromLastFrame[i+1].w-
(mvImuFromLastFrame[i+1].w-mvImuFromLastFrame[i].w)*(tend/tab))*0.5f;
tstep = mCurrentFrame.mTimeStamp-mvImuFromLastFrame[i].t;
}
// For two data, use the first moment , There should be no such situation ,, You should try it later
else if((i==0) && (i==(n-1)))
{
acc = mvImuFromLastFrame[i].a;
angVel = mvImuFromLastFrame[i].w;
tstep = mCurrentFrame.mTimeStamp-mCurrentFrame.mpPrevFrame->mTimeStamp;
}
// Step 3. Perform pre integral calculation in turn
// It must exist , One is relative to the previous key frame , One is relative to the previous frame
mpImuPreintegratedFromLastKF->IntegrateNewMeasurement(acc,angVel,tstep);
pImuPreintegratedFromLastFrame->IntegrateNewMeasurement(acc,angVel,tstep);
}
// Record the image frame of the current pre integration
mCurrentFrame.mpImuPreintegratedFrame = pImuPreintegratedFromLastFrame;
mCurrentFrame.mpImuPreintegrated = mpImuPreintegratedFromLastKF;
mCurrentFrame.mpLastKeyFrame = mpLastKeyFrame;
mCurrentFrame.setIntegrated();
//Verbose::PrintMess("Preintegration is finished!! ", Verbose::VERBOSITY_DEBUG);
} We enter IntegrateNewMeasurement(acc,angVel,tstep) Take a look at the function , This part directly refers to the annotated code in the reference link , It did 2 thing ,IMU Pre integration and recurrence of error transfer matrix , About the latter , I am currently
I don't dare to scribble before I fully understand ,ctrl C+V Great way :
void Preintegrated::IntegrateNewMeasurement(const Eigen::Vector3f &acceleration, const Eigen::Vector3f &angVel, const float &dt)
{
// preservation imu data , Using the results of median integration, a pre product classification is constructed and saved in mvMeasurements in
mvMeasurements.push_back(integrable(acceleration, angVel, dt));
// Position is updated firstly, as it depends on previously computed velocity and rotation.
// Velocity is updated secondly, as it depends on previously computed rotation.
// Rotation is the last to be updated.
// Matrices to compute covariance
// Step 1. Construct covariance matrix
// Transfer matrix of noise matrix , This part is used to calculate i To j-1 Historical noise or covariance
Eigen::Matrix<float, 9, 9> A;
A.setIdentity();
// Transfer matrix of noise matrix , This part is used to calculate j-1 New noise or covariance , The numbers in these two matrices are at the current moment , The calculation is mainly for the next moment
Eigen::Matrix<float, 9, 6> B;
B.setZero();
// Consider the acceleration after offset 、 angular velocity
Eigen::Vector3f acc(acceleration(0) - b.bax, acceleration(1) - b.bay, acceleration(2) - b.baz);
Eigen::Vector3f accW(angVel(0) - b.bwx, angVel(1) - b.bwy, angVel(2) - b.bwz);
// Record the average acceleration and angular velocity
avgA = (dT * avgA + dR * acc * dt) / (dT + dt);
avgW = (dT * avgW + accW * dt) / (dT + dt);
// Update delta position dP and velocity dV (rely on no-updated delta rotation)
// According to no updated dR To update dP And dV eq.(38)
dP = dP + dV * dt + 0.5f * dR * acc * dt * dt;
dV = dV + dR * acc * dt;
// Compute velocity and position parts of matrices A and B (rely on non-updated delta rotation)
// according to η_ij = A * η_i,j-1 + B_j-1 * η_j-1 Medium A Matrix and B The matrix updates the velocity and displacement
Eigen::Matrix<float, 3, 3> Wacc = Sophus::SO3f::hat(acc);
A.block<3, 3>(3, 0) = -dR * dt * Wacc;
A.block<3, 3>(6, 0) = -0.5f * dR * dt * dt * Wacc;
A.block<3, 3>(6, 3) = Eigen::DiagonalMatrix<float, 3>(dt, dt, dt);
B.block<3, 3>(3, 3) = dR * dt;
B.block<3, 3>(6, 3) = 0.5f * dR * dt * dt;
// Update position and velocity jacobians wrt bias correction
// Because over time , It is impossible to recalculate the Jacobian matrix every time , So it needs to be done J(k+1) = j(k) + (~) Such things , Decomposition method and AB The matrix is the same
// The author of the paper is right forster On the basis of the formula in this paper, a deformation is made , Then update recursively , See https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/212
JPa = JPa + JVa * dt - 0.5f * dR * dt * dt;
JPg = JPg + JVg * dt - 0.5f * dR * dt * dt * Wacc * JRg;
JVa = JVa - dR * dt;
JVg = JVg - dR * dt * Wacc * JRg;
// Update delta rotation
// Step 2. Constructors , According to the updated bias Perform angular integration
IntegratedRotation dRi(angVel, b, dt);
// Force normalization to make it conform to the format of rotation matrix
dR = NormalizeRotation(dR * dRi.deltaR);
// Compute rotation parts of matrices A and B
// Add AB matrix
A.block<3, 3>(0, 0) = dRi.deltaR.transpose();
B.block<3, 3>(0, 0) = dRi.rightJ * dt;
// small amount delta For the initial 0, After the update, it is usually 0, Therefore, a small amount of updates are omitted
// Update covariance
// Step 3. Update covariance ,frost Chapter of the classic pre integral thesis 63 A formula , The noise (ηa, ηg) Yes dR dV dP Influence
C.block<9, 9>(0, 0) = A * C.block<9, 9>(0, 0) * A.transpose() + B * Nga * B.transpose(); // B The matrix of the 9*6 matrix Nga 6*6 Diagonal matrix ,3 Square of gyroscope noise ,3 The square of the accelerometer noise
// This part starts with 0 matrix , As the number of integrals increases , Add random walk every time , Biased information matrix
C.block<6, 6>(9, 9) += NgaWalk;
// Update rotation jacobian wrt bias correction
// Calculate the offset Jacobian matrix ,r Yes bg The derivative of ,∂ΔRij/∂bg = (ΔRjj-1) * ∂ΔRij-1/∂bg - Jr(j-1)*t
// The author of the paper is right forster On the basis of the formula in this paper, a deformation is made , Then update recursively , See https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/212
// ? Why update first JPa、JPg、JVa、JVg The last update JRg? answer : Here must be updated first dRi Can be updated to this value , But why JPg and JVg Dependent on the previous JRg Values are updated ?
JRg = dRi.deltaR.transpose() * JRg - dRi.rightJ * dt;
// Total integrated time
// Total update time
dT += dt;
}3.2 TrackReferenceKeyFrame()
Match with the key frame to solve the current frame pose , We need to find out the descriptors of the feature points of the two frames , Then get the matching relationship between the feature points of the two frames , And then 3D-2D Re projection error solves the current frame pose .
bool Tracking::TrackReferenceKeyFrame()
{
// Compute Bag of Words vector
// Step 1: Converts the descriptor of the current frame to BoW vector
mCurrentFrame.ComputeBoW();
// We perform first an ORB matching with the reference keyframe
// If enough matches are found we setup a PnP solver
ORBmatcher matcher(0.7,true);
vector<MapPoint*> vpMapPointMatches;
// Step 2: Through word bag BoW Accelerate the feature point matching between the current frame and the reference frame
int nmatches = matcher.SearchByBoW(mpReferenceKF,mCurrentFrame,vpMapPointMatches);
// The number of matches is less than 15, Think the tracking failed
if(nmatches<15) return false;
// Step 3: Take the pose of the previous frame as the initial value of the pose of the current frame
mCurrentFrame.mvpMapPoints = vpMapPointMatches;
mCurrentFrame.SetPose(mLastFrame.GetPose()); // Use the last one Tcw Set the initial value , stay PoseOptimization It can converge faster
// Step 4: By optimizing the 3D-2D To get the position and pose by using the re projection error
Optimizer::PoseOptimization(&mCurrentFrame);
// Discard outliers
// Step 5: Eliminate the outer points in the optimized matching points
// The reason why the outer points are eliminated after optimization , It is because there are marks for these outer points in the process of optimization
int nmatchesMap = 0;
for(int i =0; i<mCurrentFrame.N; i++)
{
//if(i >= mCurrentFrame.Nleft) break;
if(mCurrentFrame.mvpMapPoints[i])
{
// If the corresponding feature point is an outer point
if(mCurrentFrame.mvbOutlier[i])
{
// Clear its traces in the current frame
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
mCurrentFrame.mvbOutlier[i]=false;
if(i < mCurrentFrame.Nleft) pMP->mbTrackInView = false;
else pMP->mbTrackInViewR = false;
pMP->mbTrackInView = false;
pMP->mnLastFrameSeen = mCurrentFrame.mnId;
nmatches--;
}
else if(mCurrentFrame.mvpMapPoints[i]->Observations()>0)
// Matched interior point count ++
nmatchesMap++;
}
}
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD) return true;
else return nmatchesMap>=10; // The number of successful tracking exceeds 10 I think the tracking is successful , Otherwise, the tracking fails
}3.2.1 Get current frame descriptor
void Frame::ComputeBoW()
{
// Judge whether it has been calculated before , After calculation, skip
if(mBowVec.empty())
{
// Will describe mDescriptors Convert to DBOW Required input format
vector<cv::Mat> vCurrentDesc = Converter::toDescriptorVector(mDescriptors);
// The descriptors of feature points are converted into word bag vectors mBowVec And eigenvectors mFeatVec
mpORBvocabulary->transform(vCurrentDesc, // Current descriptor vector
mBowVec, // Output , Word bag vector , What is recorded is word id And its corresponding weight TF-IDF value
mFeatVec, // Output , Record node id And its corresponding image feature The corresponding index
4); //4 Represents the number of layers from the leaf node forward
}
}3.2.2 Feature matching using word bag ORBmatcher::SearchByBoW()
The most important purpose of this step is to use the current frame 2D Point descriptor and key frame 2D Descriptors of points match , And the key frame 2D Point and 3D Points are one-to-one correspondence , In this way, we can finally find the current frame 2D Points and keyframes 3D Matching relationship of points .
Get key frame feature points and descriptors , Initialize the container for storing the matching points of the current frame ;
// Get the map point of the key frame
const vector<MapPoint*> vpMapPointsKF = pKF->GetMapPointMatches();
// And normal frames F The index of feature points is consistent
vpMapPointMatches = vector<MapPoint*>(F.N,static_cast<MapPoint*>(NULL));
// Take out the word bag feature vector of the key frame
const DBoW2::FeatureVector &vFeatVecKF = pKF->mFeatVec;
int nmatches=0;
// Histogram for statistics of angular rotation difference of feature points
vector<int> rotHist[HISTO_LENGTH];
for(int i=0;i<HISTO_LENGTH;i++) rotHist[i].reserve(500);
// take 0~360 Convert the number of to 0~HISTO_LENGTH The coefficient of
const float factor = 1.0f/HISTO_LENGTH;Of course, make sure you belong to the same node ( Specific layer ) Of ORB Feature matching :
// We perform the matching over ORB that belong to the same vocabulary node (at a certain level)
DBoW2::FeatureVector::const_iterator KFit = vFeatVecKF.begin();
DBoW2::FeatureVector::const_iterator Fit = F.mFeatVec.begin();
DBoW2::FeatureVector::const_iterator KFend = vFeatVecKF.end();
DBoW2::FeatureVector::const_iterator Fend = F.mFeatVec.end();
while(KFit != KFend && Fit != Fend)
{
// Step 1: Take out the parts belonging to the same node Of ORB Characteristic point ( Only belong to the same node, It's a little... It's possible )
// first Element is node id, Traverse
if(KFit->first == Fit->first)
{
...
}
else if(KFit->first < Fit->first)
{
// alignment
KFit = vFeatVecKF.lower_bound(Fit->first);
}
else
{
// alignment
Fit = F.mFeatVec.lower_bound(KFit->first);
}If it belongs to the same layer , Then traverse each feature point of the key frame , Then compare the feature points on each current frame with it , Find the one with the smallest descriptor distance , Let's go to the ellipsis in the code above :
// Step 2: Traverse KF It belongs to node Characteristics of
for(size_t iKF=0; iKF<vIndicesKF.size(); iKF++)
{
// Key frame the index of feature points in this node
const unsigned int realIdxKF = vIndicesKF[iKF];
// Take out KF Map point corresponding to this feature in
MapPoint* pMP = vpMapPointsKF[realIdxKF];
if(!pMP) continue;
if(pMP->isBad()) continue;
// Take out the key frame KF The descriptor corresponding to this feature in
const cv::Mat &dKF= pKF->mDescriptors.row(realIdxKF);
int bestDist1=256; // The best distance ( Minimum distance )
int bestIdxF =-1 ;
int bestDist2=256; // Second best distance ( The penultimate distance )
int bestDist1R=256;
int bestIdxFR =-1 ;
int bestDist2R=256;
// Step 3: Traverse F It belongs to node Characteristics of , Find the best match
for(size_t iF=0; iF<vIndicesF.size(); iF++)
{
// there realIdxF It refers to the index of feature points in this node of ordinary frame
const unsigned int realIdxF = vIndicesF[iF];
// If map points exist , It means that this point has been matched , No longer match , Speed up
if(vpMapPointMatches[realIdxF]) continue;
// Take out the normal frame F The descriptor corresponding to this feature in
const cv::Mat &dF = F.mDescriptors.row(realIdxF);
// Calculate the distance of the descriptor
const int dist = DescriptorDistance(dKF,dF);
// Traverse , Record the best distance 、 The index corresponding to the best distance 、 Second best distance, etc
// If dist < bestDist1 < bestDist2, to update bestDist1 bestDist2
if(realIdxF < F.Nleft && dist<bestDist1){
bestDist2=bestDist1;
bestDist1=dist;
bestIdxF=realIdxF;
}
else if(realIdxF < F.Nleft && dist<bestDist2) bestDist2=dist;
if(realIdxF >= F.Nleft && dist<bestDist1R){
bestDist2R=bestDist1R;
bestDist1R=dist;
bestIdxFR=realIdxF;
}
else if(realIdxF >= F.Nleft && dist<bestDist2R) bestDist2R=dist;
}Next , Starting to eliminate outliers , First, according to the threshold , Then there is angle consistency :
// Step 4: According to the threshold and Angle voting eliminates mismatches
// Step 4.1: The first level is screening : The matching distance must be less than the set threshold
if(bestDist1<=TH_LOW)
{
// Step 4.2: The second level is screening : The best match is obviously better than the second best match , Then the best match is really reliable
if(static_cast<float>(bestDist1)<mfNNratio*static_cast<float>(bestDist2))
{
// Step 4.3: Record the corresponding map points that successfully match the feature points ( From keyframes )
vpMapPointMatches[bestIdxF]=pMP;
// there realIdxKF Is the feature point of the currently traversed key frame id
const cv::KeyPoint &kp =
(!pKF->mpCamera2) ? pKF->mvKeysUn[realIdxKF] :
(realIdxKF >= pKF -> NLeft) ? pKF -> mvKeysRight[realIdxKF - pKF -> NLeft]
: pKF -> mvKeys[realIdxKF];
// Step 4.4: Calculate the histogram of the rotation angle difference of the matching point
if(mbCheckOrientation)
{
cv::KeyPoint &Fkp = (!pKF->mpCamera2 || F.Nleft == -1) ? F.mvKeys[bestIdxF] :
(bestIdxF >= F.Nleft) ? F.mvKeysRight[bestIdxF - F.Nleft] : F.mvKeys[bestIdxF];
// The angle changes of all feature points should be consistent , Get the most accurate angle change value through histogram statistics
float rot = kp.angle-Fkp.angle;
if(rot<0.0) rot+=360.0f;
int bin = round(rot*factor);// take rot Assigned to bin Group , rounding , In fact, it is dispersed into the corresponding histogram Group
if(bin==HISTO_LENGTH) bin=0;
assert(bin>=0 && bin<HISTO_LENGTH);
rotHist[bin].push_back(bestIdxF);
}
nmatches++;
}
}
}
KFit++;
Fit++;Eliminate the outer points according to the angle :
// Step 5 Eliminate mismatched points according to the direction
if(mbCheckOrientation)
{
// index
int ind1=-1;
int ind2=-1;
int ind3=-1;
// Filter out the top three with the largest number of rotation angle differences in the histogram interval bin The index of
ComputeThreeMaxima(rotHist,HISTO_LENGTH,ind1,ind2,ind3);
for(int i=0; i<HISTO_LENGTH; i++)
{
// If the rotation angle change of feature points belongs to these three groups , The retention
if(i==ind1 || i==ind2 || i==ind3)
continue;
// Eliminate the matching pairs that are not in the first three , Because they don't meet “ Main stream rotation direction ”
for(size_t j=0, jend=rotHist[i].size(); j<jend; j++)
{
vpMapPointMatches[rotHist[i][j]]=static_cast<MapPoint*>(NULL);
nmatches--;
}
}
}
return nmatches;
}3.2.3 3D-2D Re projection for pose
Refer to the connection :https://blog.csdn.net/Walking_roll/article/details/119817174
int Optimizer::PoseOptimization(Frame *pFrame)
{
// Step 1: Here we first construct a big boss--g2o Sparse optimizer , BlockSolver_6_3 Express : The posture is 6 dimension , The signpost point is 3 dimension
g2o::SparseOptimizer optimizer;// Graph model
g2o::BlockSolver_6_3::LinearSolverType * linearSolver;// Linear solver declaration
// Create a linear solver
linearSolver = new g2o::LinearSolverDense<g2o::BlockSolver_6_3::PoseMatrixType>();
// Create a matrix solver and initialize with the above linear solver
g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver);
// Create a total solver , And initialized with the above matrix solver , You can see that there is LM Algorithm
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
// Setup solver
optimizer.setAlgorithm(solver);
// In the input frame , Effective , Participate in the optimization process 2D-3D Point to point
int nInitialCorrespondences=0;
// Step 2: Add vertex : The pose of the current frame to be optimized
g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap();// Create a vertex
vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw));// Into quaternions + The form of translation vector
// Set up id
vSE3->setId(0);
// Variables to be optimized , So it can't be fixed
vSE3->setFixed(false);
optimizer.addVertex(vSE3);// Add vertices to the optimizer
// Number of map points , That is, the number of map points to be added to the optimizer . Used to calculate the error edge ( Reprojection error )
const int N = pFrame->N;
vector<ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose*> vpEdgesMono;
vector<ORB_SLAM3::EdgeSE3ProjectXYZOnlyPoseToBody *> vpEdgesMono_FHR;
vector<size_t> vnIndexEdgeMono, vnIndexEdgeRight;
vpEdgesMono.reserve(N);
vpEdgesMono_FHR.reserve(N);
vnIndexEdgeMono.reserve(N);
vnIndexEdgeRight.reserve(N);
vector<g2o::EdgeStereoSE3ProjectXYZOnlyPose*> vpEdgesStereo;
vector<size_t> vnIndexEdgeStereo;
vpEdgesStereo.reserve(N);
vnIndexEdgeStereo.reserve(N);
// The following involves the knowledge of removing outliers from Chi square distribution , There is no explanation here
// The degree of freedom is 2 Chi square distribution of , The significance level is 0.05, Corresponding critical threshold 5.991
const float deltaMono = sqrt(5.991);
// The degree of freedom is 3 Chi square distribution of , The significance level is 0.05, Corresponding critical threshold 7.815
const float deltaStereo = sqrt(7.815);
// Step 3: Add a unary edge ( Because this function only optimizes the current pose )
{
// Lock map points . Because the system is multithreaded , Therefore, when fetching data, it is necessary to lock to ensure thread safety .
// On the other hand , You need to use map points to construct vertices and edges , Therefore, we do not want some map points to be rewritten in the process of construction, resulting in inconsistency or even segment errors
unique_lock<mutex> lock(MapPoint::mGlobalMutex);
// Traverse all map points in the current map
for(int i=0; i<N; i++)
{
MapPoint* pMP = pFrame->mvpMapPoints[i];
// If this map point exists
if(pMP)
{
if(!pFrame->mpCamera2)
{
// Monocular situation
if(pFrame->mvuRight[i]<0)
{
nInitialCorrespondences++;
pFrame->mvbOutlier[i] = false;// Default that this map point is not an outer point
// Observation of this map point
const cv::KeyPoint &kpUn = pFrame->mvKeysUn[i];
Eigen::Matrix<double,2,1> obs(kpUn.pt.x, kpUn.pt.y);
// New edge , This side only optimizes the pose Pose
ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose* e = new ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose();
e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0)));
e->setMeasurement(obs);// Set the measured value
// The confidence of this point , It is related to the layer where the feature points are located . Use information matrix ( The inverse of the covariance matrix ) To express .
const float invSigma2 = pFrame->mvInvLevelSigma2[kpUn.octave];
e->setInformation(Eigen::Matrix2d::Identity()*invSigma2);
// The robust kernel function is used here
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber;
e->setRobustKernel(rk);
rk->setDelta(deltaMono);
// Set camera internal parameters
e->pCamera = pFrame->mpCamera;
// Spatial location of map points , As the initial value of the iteration
cv::Mat Xw = pMP->GetWorldPos();
e->Xw[0] = Xw.at<float>(0);
e->Xw[1] = Xw.at<float>(1);
e->Xw[2] = Xw.at<float>(2);
optimizer.addEdge(e);// Add this side to the optimizer
vpEdgesMono.push_back(e);// The recording edge belongs to monocular situation
vnIndexEdgeMono.push_back(i);// Index of records
}
else // Stereo observation
{
nInitialCorrespondences++;
pFrame->mvbOutlier[i] = false;
// There is one more right target coordinate
const cv::KeyPoint &kpUn = pFrame->mvKeysUn[i];
const float &kp_ur = pFrame->mvuRight[i];
Eigen::Matrix<double,3,1> obs(kpUn.pt.x, kpUn.pt.y, kp_ur);
// The new node , Note that here is also only to optimize the posture
g2o::EdgeStereoSE3ProjectXYZOnlyPose* e = new g2o::EdgeStereoSE3ProjectXYZOnlyPose();
e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0)));
e->setMeasurement(obs);
// The degree of confidence mainly depends on the layer where the left eye feature point is located
const float invSigma2 = pFrame->mvInvLevelSigma2[kpUn.octave];
Eigen::Matrix3d Info = Eigen::Matrix3d::Identity()*invSigma2;
e->setInformation(Info);
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber;
e->setRobustKernel(rk);
rk->setDelta(deltaStereo);
// Get coordinates of the internal reference map points as initial values
e->fx = pFrame->fx;
e->fy = pFrame->fy;
e->cx = pFrame->cx;
e->cy = pFrame->cy;
e->bf = pFrame->mbf;
cv::Mat Xw = pMP->GetWorldPos();
e->Xw[0] = Xw.at<float>(0);
e->Xw[1] = Xw.at<float>(1);
e->Xw[2] = Xw.at<float>(2);
optimizer.addEdge(e);
vpEdgesStereo.push_back(e);
vnIndexEdgeStereo.push_back(i);
}
}
}
}
}
// If there are not enough matching points , Then I have to give up
if(nInitialCorrespondences<3) return 0;
// Step 4: Start optimizing , A total of four optimizations , Each optimization iteration 10 Time , After each optimization , Divide observations into outlier and inlier,outlier Do not participate in the next optimization
// Threshold value calculated based on Chi square test ( Suppose the measurement has a deviation of one pixel )
const float chi2Mono[4]={5.991,5.991,5.991,5.991}; // Monocular
const float chi2Stereo[4]={7.815,7.815,7.815, 7.815}; // Binocular
const int its[4]={10,10,10,10};// Four iterations , Number of iterations per iteration
// bad Number of map points
int nBad=0;
// A total of four optimizations
for(size_t it=0; it<4; it++)
{
// The re projection error is calculated .
vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw));
// It is actually initializing the optimizer , Parameters here 0 Even if you don't fill in , The default is 0, That's right level by 0 Optimize the edges of
optimizer.initializeOptimization(0);
// Start optimizing , Optimize 10 Time
optimizer.optimize(its[it]);
nBad=0;
// Optimization is over , Start traversing each error edge involved in optimization ( Monocular ), In fact, it is the re projection error
for(size_t i=0, iend=vpEdgesMono.size(); i<iend; i++)
{
ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose* e = vpEdgesMono[i];
const size_t idx = vnIndexEdgeMono[i];
// The following is chi square test
// Since chi square test is performed for all observations after each optimization outlier and inlier Distinguish , Therefore, it was previously judged as outlier It's possible to become inlier, vice versa
// If this error edge comes from outlier
if(pFrame->mvbOutlier[idx]) e->computeError();
// Namely error*\Omega*error, The error of this point is characterized ( After considering confidence )
const float chi2 = e->chi2();
// The test failed
if(chi2>chi2Mono[it])
{
pFrame->mvbOutlier[idx]=true;
e->setLevel(1); // Set to outlier , level 1 Corresponding to the outer point , In the above process, we set it as not optimized
nBad++;
}
else
{
pFrame->mvbOutlier[idx]=false;
e->setLevel(0); // Set to inlier, level 0 Corresponds to the interior point , In the above process, we just want to optimize these relationships
}
if(it==2) e->setRobustKernel(0); // Except for the first two optimizations RobustKernel outside , The rest of the optimizations don't need -- Because the error of re projection has decreased significantly
}
// ……
// Step 5 Get the optimized pose of the current frame
g2o::VertexSE3Expmap* vSE3_recov = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(0));
g2o::SE3Quat SE3quat_recov = vSE3_recov->estimate();
cv::Mat pose = Converter::toCvMat(SE3quat_recov);
pFrame->SetPose(pose);// Set the optimized posture
// And return the number of interior points
return nInitialCorrespondences-nBad;
}3.3 TrackWithMotionModel()
It is very similar to the previous one , It is also necessary to have an initial estimation of the pose of the current frame , You need to find the matching relationship of the corresponding points , use 3D-2D Seeking position and pose , Only the matching object becomes the last frame 3D O 'clock . And for IMU The situation of ,
Direct use IMU The pose obtained by integration is given to the current frame , So the speed will be faster .
bool Tracking::TrackWithMotionModel()
{
// Minimum distance < 0.9* Second small distance The match is successful , Check the rotation
ORBmatcher matcher(0.9,true);
// Update last frame pose according to its reference keyframe
// Create "visual odometry" points if in Localization Mode
// Step 1: Update the pose of the previous frame ; For binocular or RGB-D The camera , Temporary map points will also be generated according to the depth value
UpdateLastFrame();
// Step 2: according to IMU Or the constant speed model obtains the initial pose of the current frame .
if (mpAtlas->isImuInitialized() && (mCurrentFrame.mnId>mnLastRelocFrameId+mnFramesToResetIMU))
{
// Predict state with IMU if it is initialized and it doesnt need reset
// IMU Initialization complete also It takes a long time to relocate, so it doesn't need to be reset IMU, use IMU To estimate the pose , There is no one in the back
PredictStateIMU();
return true;
}
else
{
// According to the previously estimated speed , Use the constant speed model to get the initial pose of the current frame .
mCurrentFrame.SetPose(mVelocity * mLastFrame.GetPose());
}
// Clear the map points of the current frame
fill(mCurrentFrame.mvpMapPoints.begin(),mCurrentFrame.mvpMapPoints.end(),static_cast<MapPoint*>(NULL));
// Project points seen in previous frame
// Set the matching radius in the search process
int th;
if(mSensor==System::STEREO)
th=7;
else
th=15;
// Step 3: Use the map points of the previous frame for projection matching , If there are not enough matching points , Expand the search radius and do it again
int nmatches = matcher.SearchByProjection(mCurrentFrame,mLastFrame,th,mSensor==System::MONOCULAR || mSensor==System::IMU_MONOCULAR);
// If few matches, uses a wider window search
// If there are too few matching points , Expand the search radius and do it again
if(nmatches<20)
{
Verbose::PrintMess("Not enough matches, wider window search!!", Verbose::VERBOSITY_NORMAL);
fill(mCurrentFrame.mvpMapPoints.begin(),mCurrentFrame.mvpMapPoints.end(),static_cast<MapPoint*>(NULL));
nmatches = matcher.SearchByProjection(mCurrentFrame,mLastFrame,2*th,mSensor==System::MONOCULAR || mSensor==System::IMU_MONOCULAR);
Verbose::PrintMess("Matches with wider search: " + to_string(nmatches), Verbose::VERBOSITY_NORMAL);
}
// This is different from ORB-SLAM2 The way
if(nmatches<20)
{
Verbose::PrintMess("Not enough matches!!", Verbose::VERBOSITY_NORMAL);
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
return true;
else
return false;
}
// Optimize frame pose with all matches
// Step 4: utilize 3D-2D Projection relation , Optimize the pose of the current frame
Optimizer::PoseOptimization(&mCurrentFrame);
// Discard outliers
// Step 5: Eliminate the outer and outer points of map points
int nmatchesMap = 0;
for(int i =0; i<mCurrentFrame.N; i++)
{
if(mCurrentFrame.mvpMapPoints[i])
{
if(mCurrentFrame.mvbOutlier[i])
{
// If a map point is judged to be an outer point after optimization , Clear all its relationships
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
mCurrentFrame.mvbOutlier[i]=false;
if(i < mCurrentFrame.Nleft){
pMP->mbTrackInView = false;
}
else{
pMP->mbTrackInViewR = false;
}
pMP->mnLastFrameSeen = mCurrentFrame.mnId;
nmatches--;
}
else if(mCurrentFrame.mvpMapPoints[i]->Observations()>0)
// Accumulate the number of map points successfully matched
nmatchesMap++;
}
}
// In pure positioning mode : If very few map points are successfully tracked , So here mbVO The flag will be set
if(mbOnlyTracking)
{
mbVO = nmatchesMap<10;
return nmatches>20;
}
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
return true;
else
return nmatchesMap>=10; // Matches more than 10 One point is considered to be successful tracking
}3.3.1 Update the pose of the previous frame and add road markings UpdateLastFrame
The key frame of the previous frame is known , The relative pose relationship between the key frame of the previous frame and the previous frame is known , Then the pose of the previous frame can be obtained . Supplementary road markings are for RGBD And binocular situation , Because the depth value of feature points
In the build Frame It's time to find out , Monocular mode has no depth information of feature points .
Step 1: Use the reference key frame to update the pose of the previous frame in the world coordinate system
void Tracking::UpdateLastFrame()
{
// Update pose according to reference keyframe
// The reference key frame of the previous normal frame , Note that the reference key frame is used here ( Accurate posture ) Instead of the normal frame of the previous frame
KeyFrame* pRef = mLastFrame.mpReferenceKF;
// ref_keyframe To lastframe Position and pose transformation of
Sophus::SE3f Tlr = mlRelativeFramePoses.back();
// Calculate the pose in the world coordinate system of the previous frame
// l:last, r:reference, w:world
// Tlw = Tlr*Trw
mLastFrame.SetPose(Tlr * pRef->GetPose());
// If the previous frame is a keyframe , Or monocular / Monocular inertia ,SLAM Mode , The exit
if(mnLastKeyFrameId==mLastFrame.mnId || mSensor==System::MONOCULAR || mSensor==System::IMU_MONOCULAR || !mbOnlyTracking)
return;Step 2: For binocular or rgbd The camera , Generate new temporary map points for the previous frame
// Note that these map points are only used for tracking , Don't add to the map , It will be deleted after tracking
// Create "visual odometry" MapPoints
// We sort points according to their measured depth by the stereo/RGB-D sensor
// Step 2.1: Get the feature points with effective depth value in the previous frame ( Not necessarily map points )
vector<pair<float,int> > vDepthIdx;
const int Nfeat = mLastFrame.Nleft == -1? mLastFrame.N : mLastFrame.Nleft;
vDepthIdx.reserve(Nfeat);
for(int i=0; i<Nfeat;i++)
{
float z = mLastFrame.mvDepth[i];
if(z>0)
{
// vDepthIdx The first element is the depth of a point , The second element is the corresponding feature point id
vDepthIdx.push_back(make_pair(z,i));
}
}
// If there is no point with effective depth in the previous frame , So just quit
if(vDepthIdx.empty()) return;
// Sort by depth from small to large
sort(vDepthIdx.begin(),vDepthIdx.end());
// We insert all close points (depth<mThDepth)
// If less than 100 close points, we insert the 100 closest ones.
// Step 2.2: Find out the parts that are not map points
int nPoints = 0;
for(size_t j=0; j<vDepthIdx.size();j++)
{
int i = vDepthIdx[j].second;
bool bCreateNew = false;
// If this point does not correspond to the map point in the previous frame , Or not observed after creation , Then generate a temporary map point
MapPoint* pMP = mLastFrame.mvpMapPoints[i];
if(!pMP)
bCreateNew = true;
else if(pMP->Observations()<1)
// Map points are not observed after they are created , I don't think it's reliable , You also need to recreate
bCreateNew = true;
if(bCreateNew)
{
// Step 2.3: Points to be created , Package as map points . Just to improve binocular and RGBD Tracking success rate , No complex attributes are added , Because it will be thrown away later
// Back projection into the world coordinate system
Eigen::Vector3f x3D;
if(mLastFrame.Nleft == -1){
mLastFrame.UnprojectStereo(i, x3D);
}
else{
x3D = mLastFrame.UnprojectStereoFishEye(i);
}
// Add to the map points of the previous frame
MapPoint* pNewMP = new MapPoint(x3D,mpAtlas->GetCurrentMap(),&mLastFrame,i);
mLastFrame.mvpMapPoints[i]=pNewMP;
// Marked as temporarily added MapPoint, After the CreateNewKeyFrame All will be deleted before
mlpTemporalPoints.push_back(pNewMP);
nPoints++;
}
else
{
// Because sort from near to far , Record the number of map points that do not need to be created
nPoints++;
}
// Step 2.4: If the quality of map points is poor , Stop creating map points
// To stop adding temporary map points, the following conditions must be met at the same time :
// 1、 The depth of the current point has exceeded the set depth threshold (35 Double baseline )
// 2、nPoints Has more than 100 A little bit , It means that the distance is far away , May not be accurate , Stop and exit
if(vDepthIdx[j].first>mThDepth && nPoints>100) break;
}
}3.3.2 use IMU Estimate the current state quantity PredictStateIMU()
The state quantity at the current time is added by the state quantity at the previous time IMU The pre product component goes to world Tie it down and estimate .
/**
* @brief When the tracking is unsuccessful , Initialized with imu Data tracking processing , adopt IMU Forecast status
* Two places to use :
* 1. Calculation speed of uniform model , But the pose of the current frame is not assigned ;
* 2. When the tracking is lost, it is not directly determined to be lost , Use this function to predict the pose of the current frame and see if it can be dragged back , Instead of repositioning in pure vision
*
* @return true
* @return false
*/
bool Tracking::PredictStateIMU()
{
if(!mCurrentFrame.mpPrevFrame)
{
Verbose::PrintMess("No last frame", Verbose::VERBOSITY_NORMAL);
return false;
}
// Summarize when the map is updated , That is to say mbMapUpdated by true
// 1. Loop back or merge
// 2. Local map LocalBundleAdjustment
// 3. IMU Three stage initialization
// The following code is as like as two peas. , It's just that the relative frames are different in calculation , The map has been updated relative to the previous key frame , On the contrary, relative to the previous frame
// When the map is updated, the keyframes and are updated MP, So it's more accurate than keyframes
// Without updating , Closer to the previous frame , The calculation error is smaller
// When the map is updated , And the last image key frame exists
if(mbMapUpdated && mpLastKeyFrame)
{
const Eigen::Vector3f twb1 = mpLastKeyFrame->GetImuPosition();
const Eigen::Matrix3f Rwb1 = mpLastKeyFrame->GetImuRotation();
const Eigen::Vector3f Vwb1 = mpLastKeyFrame->GetVelocity();
const Eigen::Vector3f Gz(0, 0, -IMU::GRAVITY_VALUE);
const float t12 = mpImuPreintegratedFromLastKF->dT;
// Calculate the pose of the current frame in the world coordinate system , The principle is to use the position and posture of pre integration ( The value of the pre integral does not change ) And the pose of the previous frame ( Will change iteratively ) updated
// rotate R_wb2 = R_wb1 * R_b1b2
Eigen::Matrix3f Rwb2 = IMU::NormalizeRotation(Rwb1 * mpImuPreintegratedFromLastKF->GetDeltaRotation(mpLastKeyFrame->GetImuBias()));
// Displacement
Eigen::Vector3f twb2 = twb1 + Vwb1*t12 + 0.5f*t12*t12*Gz+ Rwb1*mpImuPreintegratedFromLastKF->GetDeltaPosition(mpLastKeyFrame->GetImuBias());
// Speed
Eigen::Vector3f Vwb2 = Vwb1 + t12*Gz + Rwb1 * mpImuPreintegratedFromLastKF->GetDeltaVelocity(mpLastKeyFrame->GetImuBias());
// Set the camera pose of the world coordinate system of the current frame
mCurrentFrame.SetImuPoseVelocity(Rwb2,twb2,Vwb2);
// Record bias
mCurrentFrame.mImuBias = mpLastKeyFrame->GetImuBias();
mCurrentFrame.mPredBias = mCurrentFrame.mImuBias;
return true;
}
// When the map is not updated
else if(!mbMapUpdated)
{
const Eigen::Vector3f twb1 = mLastFrame.GetImuPosition();
const Eigen::Matrix3f Rwb1 = mLastFrame.GetImuRotation();
const Eigen::Vector3f Vwb1 = mLastFrame.GetVelocity();
const Eigen::Vector3f Gz(0, 0, -IMU::GRAVITY_VALUE);
// mpImuPreintegratedFrame Is the previous frame of the current frame , Not necessarily keyframes
const float t12 = mCurrentFrame.mpImuPreintegratedFrame->dT;
Eigen::Matrix3f Rwb2 = IMU::NormalizeRotation(Rwb1 * mCurrentFrame.mpImuPreintegratedFrame->GetDeltaRotation(mLastFrame.mImuBias));
Eigen::Vector3f twb2 = twb1 + Vwb1*t12 + 0.5f*t12*t12*Gz+ Rwb1 * mCurrentFrame.mpImuPreintegratedFrame->GetDeltaPosition(mLastFrame.mImuBias);
Eigen::Vector3f Vwb2 = Vwb1 + t12*Gz + Rwb1 * mCurrentFrame.mpImuPreintegratedFrame->GetDeltaVelocity(mLastFrame.mImuBias);
mCurrentFrame.SetImuPoseVelocity(Rwb2,twb2,Vwb2);
mCurrentFrame.mImuBias = mLastFrame.mImuBias;
mCurrentFrame.mPredBias = mCurrentFrame.mImuBias;
return true;
}
return false;
}
3.3.3 Use projection to find the matching relationship between the feature points of the current frame and the previous frame SearchByProjection
According to the initial value of the current frame pose , Put the last frame 3D The point is projected onto the current frame , Then, compare all feature points with this in the grid where the projection point is located 3D Distance of point descriptor , Choose the smallest one . Then compare the two
The included angle of the orientation , And put it in the corresponding square diagram . After all matching relationships are found , Their orientation should be consistent , So find the points in the top three directions of the histogram , This is the last remaining matching result .
Step1&2, Compare the two frames pose Work it out , Judge the direction of movement , And initialize the container
int ORBmatcher::SearchByProjection(Frame &CurrentFrame, const Frame &LastFrame, const float th, const bool bMono)
{
int nmatches = 0;
// Rotation Histogram (to check rotation consistency)
// Step 1 Create a rotation histogram , Used to detect rotation consistency
vector<int> rotHist[HISTO_LENGTH];
for(int i=0;i<HISTO_LENGTH;i++)
rotHist[i].reserve(500);
const float factor = 1.0f/HISTO_LENGTH;
// Step 2 Calculate the translation vector of the current frame and the previous frame
// Camera pose of the current frame
const Sophus::SE3f Tcw = CurrentFrame.GetPose();
const Eigen::Vector3f twc = Tcw.inverse().translation();
const Sophus::SE3f Tlw = LastFrame.GetPose();
const Eigen::Vector3f tlc = Tlw * twc;
// Judge forward or backward
const bool bForward = tlc(2)>CurrentFrame.mb && !bMono; // Non monocular case , If Z Greater than baseline , It means that the camera is obviously moving forward
const bool bBackward = -tlc(2)>CurrentFrame.mb && !bMono; // Non monocular case , If -Z Less than baseline , It means that the camera is obviously backward Step3&4, Put the last frame 3D The point is projected onto the current frame , See which grid it falls into , Then pull out all the points in this grid
// Step 3 For each map point in the previous frame , Project the model through the camera , Get the pixel coordinates projected to the current frame
for(int i=0; i<LastFrame.N; i++)
{
MapPoint* pMP = LastFrame.mvpMapPoints[i];
if(pMP)
{
if(!LastFrame.mvbOutlier[i])
{
// Valid for the previous frame MapPoints Project to the current frame coordinate system
Eigen::Vector3f x3Dw = pMP->GetWorldPos();
Eigen::Vector3f x3Dc = Tcw * x3Dw;
const float xc = x3Dc(0);
const float yc = x3Dc(1);
const float invzc = 1.0/x3Dc(2);
if(invzc<0) continue;
// Project into the current frame
Eigen::Vector2f uv = CurrentFrame.mpCamera->project(x3Dc);
if(uv(0)<CurrentFrame.mnMinX || uv(0)>CurrentFrame.mnMaxX) continue;
if(uv(1)<CurrentFrame.mnMinY || uv(1)>CurrentFrame.mnMaxY) continue;
// It is considered that the scale information of map points before and after projection is unchanged
int nLastOctave = (LastFrame.Nleft == -1 || i < LastFrame.Nleft) ? LastFrame.mvKeys[i].octave
: LastFrame.mvKeysRight[i - LastFrame.Nleft].octave;
// Search in a window. Size depends on scale
// Monocular :th = 7, Binocular :th = 15
float radius = th*CurrentFrame.mvScaleFactors[nLastOctave]; // The larger the scale , The larger the search
// Record candidate match points id
vector<size_t> vIndices2;
// Step 4 Judge the search scale range according to the forward and backward direction of the camera .
// It can be understood as follows , For example, a dot with a certain area , On a certain scale n Next, it is a feature point
// As the camera moves forward , The area of the dot increases , On a certain scale m Next, it is a feature point , As the area increases , It needs to be detected at a higher scale
// When the camera goes back , The area of the dot decreases , On a certain scale m Next, it is a feature point , As the area decreases , It needs to be detected at a lower scale
if(bForward) // Forward , Then the point of interest of the previous frame is at the scale nLastOctave<=nCurOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, nLastOctave);
else if(bBackward) // back off , Then the point of interest of the previous frame is at the scale 0<=nCurOctave<=nLastOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, 0, nLastOctave);
else // stay [nLastOctave-1, nLastOctave+1] Mid search
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, nLastOctave-1, nLastOctave+1);
if(vIndices2.empty()) continue;How to find the lattice ?
vector<size_t> Frame::GetFeaturesInArea(
const float &x, const float &y, const float &r,
const int minLevel,const int maxLevel, const bool bRight) const
{
// Store search results vector
vector<size_t> vIndices;
vIndices.reserve(N);
float factorX = r, factorY = r;
// Step 1 The calculated radius is r Of the grid columns and rows where the left and right upper and lower boundaries of the circle are located id
// Find radius is r The grid column coordinates of the left boundary of the circle . This place is a little winding , Slowly understand :
// (mnMaxX-mnMinX)/FRAME_GRID_COLS: Indicates that each grid in the column direction can be divided into several pixels on average ( Certainly more than 1)
// mfGridElementWidthInv=FRAME_GRID_COLS/(mnMaxX-mnMinX) It's the countdown above , It means that each pixel can be divided into several grid columns ( Definitely less than 1)
// (x-mnMinX-r), It can be seen from the left edge of the image mnMinX To radius r The number of pixel columns occupied by the left boundary area of the circle
// Multiply the two , Is to find that the radius is r In which grid column is the left boundary of the circle
// Guarantee nMinCellX Result greater than or equal to 0
const int nMinCellX = max(0,(int)floor((x-mnMinX-factorX)*mfGridElementWidthInv));
// If the grid column of the left boundary of the finally obtained circle exceeds the set upper limit , Then it means that the calculation is wrong , No characteristic points meeting the requirements can be found , Returns an empty vector
if(nMinCellX>=FRAME_GRID_COLS) return vIndices;
// Calculate the index of the right boundary grid column where the circle is located
const int nMaxCellX = min((int)FRAME_GRID_COLS-1,(int)ceil((x-mnMinX+factorX)*mfGridElementWidthInv));
// If the grid of the right boundary of the calculated circle is illegal , It indicates that this feature point is not good , Direct return null vector
if(nMaxCellX<0) return vIndices;
// The following operations are similar , Calculate the grid row where the upper and lower boundaries of the circle are located id
const int nMinCellY = max(0,(int)floor((y-mnMinY-factorY)*mfGridElementHeightInv));
if(nMinCellY>=FRAME_GRID_ROWS) return vIndices;
const int nMaxCellY = min((int)FRAME_GRID_ROWS-1,(int)ceil((y-mnMinY+factorY)*mfGridElementHeightInv));
if(nMaxCellY<0) return vIndices;
// Check whether the pyramid level range of the image to be searched meets the requirements
//? Suspected bug.(minLevel>0) Later conditions (maxLevel>=0) Certainly
//? Change it to const bool bCheckLevels = (minLevel>=0) || (maxLevel>=0);
const bool bCheckLevels = (minLevel>0) || (maxLevel>=0);
// Step 2 Traverse all meshes in the circular area , Find the candidate feature points that meet the conditions , And its index Put it in the output
for(int ix = nMinCellX; ix<=nMaxCellX; ix++)
{
for(int iy = nMinCellY; iy<=nMaxCellY; iy++)
{
// Get all the feature points in this grid in Frame::mvKeysUn Index in
const vector<size_t> vCell = (!bRight) ? mGrid[ix][iy] : mGridRight[ix][iy];
// If there are no characteristic points in this grid , Then skip this grid and move on to the next
if(vCell.empty()) continue;
// If there are characteristic points in this grid , Then traverse all the feature points in the image grid
for(size_t j=0, jend=vCell.size(); j<jend; j++)
{
// Read this feature point first according to the index
const cv::KeyPoint &kpUn = (Nleft == -1) ? mvKeysUn[vCell[j]] : (!bRight) ? mvKeys[vCell[j]] : mvKeysRight[vCell[j]];
if(bCheckLevels)
{
// cv::KeyPoint::octave What is represented in is the data extracted from which layer of the pyramid
// Ensure that the feature points are at the pyramid level minLevel and maxLevel Between , If not, skip
if(kpUn.octave<minLevel) continue;
if(maxLevel>=0) if(kpUn.octave>maxLevel) continue;
}
// clear through , Calculate the distance from the candidate feature point to the center of the circle , Check whether it is within this circular area
const float distx = kpUn.pt.x-x;
const float disty = kpUn.pt.y-y;
// If x Direction and y The distance in both directions is within the specified radius , Store it index Are candidate feature points
if(fabs(distx)<factorX && fabs(disty)<factorY) vIndices.push_back(vCell[j]);
}
}
}
return vIndices;
}Step5 Traverse the candidate matching points in the lattice , Find the best matching point with the smallest descriptor distance Step 6 Classify according to the rotation angle difference of matching points
// Step 6 Calculate the histogram of the rotation angle difference of the matching point
if(mbCheckOrientation)
{
cv::KeyPoint kpLF = (LastFrame.Nleft == -1) ? LastFrame.mvKeysUn[i]
: (i < LastFrame.Nleft) ? LastFrame.mvKeys[i]
: LastFrame.mvKeysRight[i - LastFrame.Nleft];
cv::KeyPoint kpCF = (CurrentFrame.Nleft == -1) ? CurrentFrame.mvKeysUn[bestIdx2]
: (bestIdx2 < CurrentFrame.Nleft) ? CurrentFrame.mvKeys[bestIdx2]
: CurrentFrame.mvKeysRight[bestIdx2 - CurrentFrame.Nleft];
float rot = kpLF.angle-kpCF.angle;
if(rot<0.0) rot+=360.0f;
int bin = round(rot*factor);
if(bin==HISTO_LENGTH) bin=0;
rotHist[bin].push_back(bestIdx2);
}
Of course , For the right eye , Re projection is also required , Find the grid , Calculate descriptors to find matching points , The operation of classifying according to the angle difference .
if(CurrentFrame.Nleft != -1){
...
}
}
}
} Step 7 Perform rotation consistency detection , Eliminate inconsistent matches
if(mbCheckOrientation)
{
int ind1=-1;
int ind2=-1;
int ind3=-1;
ComputeThreeMaxima(rotHist,HISTO_LENGTH,ind1,ind2,ind3);
for(int i=0; i<HISTO_LENGTH; i++)
{
// For quantity is not before 3 The points are right , To eliminate
if(i!=ind1 && i!=ind2 && i!=ind3)
{
for(size_t j=0, jend=rotHist[i].size(); j<jend; j++)
{
CurrentFrame.mvpMapPoints[rotHist[i][j]]=static_cast<MapPoint*>(NULL);
nmatches--;
}
}
}
}
return nmatches;
}
3.4 relocation Relocalization()
If you match the previous frame according to the constant speed model , Or use word bags and KeyFrame Match , Or use IMU Integral data , If these three moves cannot predict the current posture , That leaves only the last trick : relocation .
First, find several alternative loopback frames according to the word bag , Reuse MLPnP The algorithm estimates the pose , If it is estimated, then BA Optimize posture .
Step 1: Calculate the number of feature points in the current frame Bow mapping
bool Tracking::Relocalization()
{
Verbose::PrintMess("Starting relocalization", Verbose::VERBOSITY_NORMAL);
// Compute Bag of Words Vector
mCurrentFrame.ComputeBoW();Step 2: Find a candidate keyframe group similar to the current frame
// Relocalization is performed when tracking is lost
// Track Lost: Query KeyFrame Database for keyframe candidates for relocalisation
vector<KeyFrame*> vpCandidateKFs = mpKeyFrameDB->DetectRelocalizationCandidates(&mCurrentFrame, mpAtlas->GetCurrentMap());
if(vpCandidateKFs.empty()) return false;
const int nKFs = vpCandidateKFs.size();
// We perform first an ORB matching with each candidate
// If enough matches are found we setup a PnP solver
ORBmatcher matcher(0.75,true);
// Solver for each keyframe
vector<MLPnPsolver*> vpMLPnPsolvers;
vpMLPnPsolvers.resize(nKFs);
// The matching relationship between each key frame and the feature points in the current frame
vector<vector<MapPoint*> > vvpMapPointMatches;
vvpMapPointMatches.resize(nKFs);
// Discard the marking of a key frame
vector<bool> vbDiscarded;
vbDiscarded.resize(nKFs);
// Number of valid candidate keyframes
int nCandidates=0;Step 3: Traverse all candidate keyframes , adopt BoW Make a quick match , Initialize with matching results PnP Solver
for(int i=0; i<nKFs; i++)
{
KeyFrame* pKF = vpCandidateKFs[i];
if(pKF->isBad()) vbDiscarded[i] = true;
else
{
// The current frame and candidate key frames are used BoW Make a quick match , The matching results are recorded in vvpMapPointMatches,nmatches Indicates the number of matches
int nmatches = matcher.SearchByBoW(pKF,mCurrentFrame,vvpMapPointMatches[i]);
// If the number of matches with the current frame is less than 15, Then you can only abandon this key frame
if(nmatches<15)
{
vbDiscarded[i] = true;
continue;
}
else
{
// If the matching number is enough , Initialize with matching results MLPnPsolver
// ? Why MLPnP? Because the fisheye camera model is considered , Decouple certain relationships ?
// Reference paper 《MLPNP-A REAL-TIME MAXIMUM LIKELIHOOD SOLUTION TO THE PERSPECTIVE-N-POINT PROBLEM》
MLPnPsolver* pSolver = new MLPnPsolver(mCurrentFrame,vvpMapPointMatches[i]);
// The constructor is called once , Here reset the parameters
pSolver->SetRansacParameters(
0.99, // Maximum probability value of the model , Default 0.9
10, // The minimum threshold of the interior point , Default 8
300, // Maximum number of iterations , Default 300
6, // The minimum set , Six points are sampled each time , That is, the minimum set should be set to 6, The paper says I > 5
0.5, // The theoretical minimum number of interior points , Here is the proportion of the total , therefore epsilon Is the proportion , The default is 0.4
5.991); // Chi square test threshold //This solver needs at least 6 points
vpMLPnPsolvers[i] = pSolver;
nCandidates++; // 1.0 New version
}
}
}Step 4: Through a series of operations , Until you find the key frame that can match
// Alternatively perform some iterations of P4P RANSAC
// Until we found a camera pose supported by enough inliers
// Enough interior points can be matched PNP Algorithm ,MLPnP You need at least 6 A little bit
// A flag indicating whether a matching key frame has been found
bool bMatch = false;
ORBmatcher matcher2(0.9,true);
// Why is it so complicated ? answer : It's fear of false closed loop
while(nCandidates>0 && !bMatch)
{
// Traverse all current candidate keyframes
for(int i=0; i<nKFs; i++)
{
// Ignore the abandoned
if(vbDiscarded[i]) continue;
// Perform 5 Ransac Iterations
// Inner point marker
vector<bool> vbInliers;
// Internal points
int nInliers;
// Express RANSAC There are no more iterations available -- In other words, the data is not good enough ,RANSAC I've tried my best ...
bool bNoMore;
// Step 4.1: adopt MLPnP The algorithm estimates the attitude , iteration 5 Time
MLPnPsolver* pSolver = vpMLPnPsolvers[i];
Eigen::Matrix4f eigTcw;
// PnP The entry function of the algorithm
bool bTcw = pSolver->iterate(5,bNoMore,vbInliers,nInliers, eigTcw);
// If Ransac reachs max. iterations discard keyframe
// bNoMore by true It means that it has exceeded RANSAC Maximum number of iterations , Just discard the current keyframe
if(bNoMore)
{
vbDiscarded[i]=true;
nCandidates--;
}
// If a Camera Pose is computed, optimize
if(bTcw)
{
// Step 4.2: If MLPnP Calculate the posture , Carry out BA Optimize
Sophus::SE3f Tcw(eigTcw);
mCurrentFrame.SetPose(Tcw);
// Tcw.copyTo(mCurrentFrame.mTcw);
// MLPnP in RANSAC Set of interior points after
set<MapPoint*> sFound;
const int np = vbInliers.size();
// Traverse all interior points
for(int j=0; j<np; j++)
{
if(vbInliers[j])
{
mCurrentFrame.mvpMapPoints[j]=vvpMapPointMatches[i][j];
sFound.insert(vvpMapPointMatches[i][j]);
}
else mCurrentFrame.mvpMapPoints[j]=NULL;
}
// Only optimize posture , Do not optimize the coordinates of map points , Returns the number of interior points
int nGood = Optimizer::PoseOptimization(&mCurrentFrame);
// If the number of interior points after optimization is small , Skipped the current candidate keyframe , But it doesn't give up the relocation of the current frame
if(nGood<10) continue;
// Delete the map point corresponding to the outer point , Here it is directly set as null pointer
for(int io =0; io<mCurrentFrame.N; io++)
if(mCurrentFrame.mvbOutlier[io])
mCurrentFrame.mvpMapPoints[io]=static_cast<MapPoint*>(NULL);
// If few inliers, search by projection in a coarse window and optimize again
// Step 4.3: If there are fewer interior points , Then the previously unmatched points are matched by projection , Then optimize the solution
// The previous matching relationship is obtained by the word bag matching process
if(nGood<50)
{
// The unmatched map points in the key frame are projected into the current frame by projection , Generate a new match
int nadditional =matcher2.SearchByProjection(mCurrentFrame,vpCandidateKFs[i],sFound,10,100);
// If more matching feature point pairs are added through the projection process
if(nadditional+nGood>=50)
{
// According to the result of projection matching , Use... Again 3D-2D pnp BA Optimize posture
nGood = Optimizer::PoseOptimization(&mCurrentFrame);
// If many inliers but still not enough, search by projection again in a narrower window
// the camera has been already optimized with many points
// Step 4.4: If BA The number of points in the back is still relatively small (<50) But not too few (>30), It can be saved , Finally dying
// Repeat the previous step 4.3 The process of , Just use a smaller search window
// The pose here has been optimized with more points , It should be more accurate , So use a smaller window to search
if(nGood>30 && nGood<50)
{
// Use smaller windows 、 Stricter descriptor threshold , Perform projection search matching again
sFound.clear();
for(int ip =0; ip<mCurrentFrame.N; ip++)
if(mCurrentFrame.mvpMapPoints[ip])
sFound.insert(mCurrentFrame.mvpMapPoints[ip]);
nadditional =matcher2.SearchByProjection(mCurrentFrame,vpCandidateKFs[i],sFound,3,64);
// Final optimization
// If successfully saved , The matching number meets the requirements , Last BA Optimize it
if(nGood+nadditional>=50)
{
nGood = Optimizer::PoseOptimization(&mCurrentFrame);
// Update map points
for(int io =0; io<mCurrentFrame.N; io++)
if(mCurrentFrame.mvbOutlier[io])
mCurrentFrame.mvpMapPoints[io]=NULL;
}
// If you still can't be satisfied, give up
}
}
}
// If the pose is supported by enough inliers stop ransacs and continue
// If there are enough interior points for the current candidate key frame (50 individual ) 了 , Then it is considered that the relocation is successful
if(nGood>=50)
{
bMatch = true;
// As long as one candidate key frame is relocated successfully , Just exit the loop , Don't consider other candidate keyframes
break;
}
}
}// Has been running , Know that there are not enough keyframes , Or there are keyframes that have been successfully matched
}
// After tossing for so long, I still haven't matched , Relocation failed
if(!bMatch) return false;
else
{
// If it matches , It indicates that the relocation of the current frame is successful ( The current frame has its own pose )
// Record the successful relocation frame id, Prevent multiple relocations in a short time
mnLastRelocFrameId = mCurrentFrame.mnId;
return true;
}
}3.4.1 adopt MLPnP The algorithm estimates the attitude MLPnPsolver::iterate()
Reference link :https://blog.csdn.net/qq_39266065/article/details/115614421
https://zhuanlan.zhihu.com/p/349773077
https://blog.csdn.net/joun772/article/details/119409329
https://github.com/electech6/ORB_SLAM3_detailed_comments
I didn't understand this part ,cv Refer to the content of the link .
(1) Constructors
MLPnPsolver::MLPnPsolver(const Frame &F, // Input frame data
const vector<MapPoint *> &vpMapPointMatches // Feature points to be matched , It is used for current frame and candidate key frame BoW The result of fast matching
) : mnInliersi(0), // Number of interior points
mnIterations(0), // Ransac The number of iterations
mnBestInliers(0), // Best internal points
N(0), // all 2D Number of points
mpCamera(F.mpCamera) // Camera model , Use this variable to pair 3D Point projection
{
mvpMapPointMatches = vpMapPointMatches; // Feature points to be matched , It is used for current frame and candidate key frame BoW The result of fast matching
mvBearingVecs.reserve(F.mvpMapPoints.size()); // initialization 3D The unit vector of the point
mvP2D.reserve(F.mvpMapPoints.size()); // initialization 3D Projection point of point
mvSigma2.reserve(F.mvpMapPoints.size()); // Initialize sigma value
mvP3Dw.reserve(F.mvpMapPoints.size()); // initialization 3D Point coordinates
mvKeyPointIndices.reserve(F.mvpMapPoints.size()); // initialization 3D Index value of point
mvAllIndices.reserve(F.mvpMapPoints.size()); // Initialize all index values
// Some necessary initialization operations
int idx = 0;
for (size_t i = 0, iend = mvpMapPointMatches.size(); i < iend; i++)
{
MapPoint *pMP = vpMapPointMatches[i];
// If pMP There is , Then initialize some parameters , Otherwise, do nothing
if (pMP)
{
// Judge whether it is a bad point
if (!pMP->isBad())
{
// If the number of points recorded exceeds the total , Do nothing , Otherwise, continue to record
if (i >= F.mvKeysUn.size()) continue;
const cv::KeyPoint &kp = F.mvKeysUn[i];
// preservation 3D Projection point of point
mvP2D.push_back(kp.pt);
// Save... In Chi square test sigma value
mvSigma2.push_back(F.mvLevelSigma2[kp.octave]);
// Bearing vector should be normalized
// Feature point projection , And calculate the unit vector
cv::Point3f cv_br = mpCamera->unproject(kp.pt);
cv_br /= cv_br.z;
bearingVector_t br(cv_br.x, cv_br.y, cv_br.z);
mvBearingVecs.push_back(br);
// 3D coordinates
// Get the current feature point 3D coordinate
Eigen::Matrix<float, 3, 1> posEig = pMP->GetWorldPos();
point_t pos(posEig(0), posEig(1), posEig(2));
mvP3Dw.push_back(pos);
// Record the index value of the current feature point , Selected
mvKeyPointIndices.push_back(i);
// Record the index values of all feature points
mvAllIndices.push_back(idx);
idx++;
}
}
}
// Set up RANSAC Parameters
SetRansacParameters();
}(2) The main function
Here the author wrote RANSAC Method , For the set of candidate matching points , Every election 6 Points to fit a model , Calculate the re projection error for the remaining points , If the error is less than the threshold, it is considered as the inner point ; Count the number of points in each model , choice
The most popular model .
Step 1: Judge , If 2D The number of points is not enough to start RANSAC Minimum lower bound of iterative process , The exit
// RANSAC methods
/**
* @brief MLPnP Iterative calculation of camera pose
*
* @param[in] nIterations The number of iterations
* @param[in] bNoMore The sign of reaching the maximum number of iterations
* @param[in] vbInliers Marking of inner point
* @param[in] nInliers Total internal points
* @return cv::Mat Calculated posture
*/
bool MLPnPsolver::iterate(int nIterations, bool &bNoMore, vector<bool> &vbInliers, int &nInliers, Eigen::Matrix4f &Tout)
{
Tout.setIdentity();
bNoMore = false; // The sign that the maximum number of iterations has been reached
vbInliers.clear(); // Clear and save the container to judge whether it is an inner point
nInliers = 0; // Number of internal points at the current iteration
// N For all 2D Number of points , mRansacMinInliers Normal exit RANSAC The least in the iteration process inlier Count
// Step 1: Judge , If 2D The number of points is not enough to start RANSAC Minimum lower bound of iterative process , The exit
if (N < mRansacMinInliers)
{
bNoMore = true; // The sign that the maximum number of iterations has been reached
return false; // Function exit
}Step 2: Normal iterative calculation for camera pose estimation , If the upper limit of effect is met , Return the best estimate directly , Otherwise, continue to use the minimum set (6 A little bit ) Estimated pose
// mvAllIndices For all involved PnP Of 2D Index of points
// vAvailableIndices For every time from mvAllIndices Middle random selection mRansacMinSet Group 3D-2D Conduct a corresponding point RANSAC
vector<size_t> vAvailableIndices;
// Current iterations id
int nCurrentIterations = 0;
// Conditions for iteration :
// Conditions 1: The number of iterations in history is less than the maximum iteration
// Conditions 2: The number of iterations currently performed is less than the maximum iteration value given by the current function
while (mnIterations < mRansacMaxIts || nCurrentIterations < nIterations)
{
// The number of iterations is updated plus 1, Until the maximum number of iterations is reached
nCurrentIterations++;
mnIterations++;
// Clear the count of existing matching points , Prepare for a new iteration
vAvailableIndices = mvAllIndices;
// Bearing vectors and 3D points used for this ransac iteration
// Initialize unit vectors and 3D spot , To current ransac Use iteratively
bearingVectors_t bearingVecs(mRansacMinSet);
points_t p3DS(mRansacMinSet);
vector<int> indexes(mRansacMinSet);
// Get min set of points
// from vAvailableIndices Select the mRansacMinSet Operate at points , This is supposed to be 6
for (short i = 0; i < mRansacMinSet; ++i)
{
// Randomly select one of all candidate points , By randomly extracting the index array vAvailableIndices The index of [randi] To achieve
int randi = DUtils::Random::RandomInt(0, vAvailableIndices.size() - 1);
// vAvailableIndices[randi] Is the real index value of the alternative point ,randi Is the index value of the index array , Don't confuse
int idx = vAvailableIndices[randi];
bearingVecs[i] = mvBearingVecs[idx];
p3DS[i] = mvP3Dw[idx];
indexes[i] = i;
// Delete the extracted points from all candidate point arrays , The operation of not putting back in probability theory
vAvailableIndices[randi] = vAvailableIndices.back();
vAvailableIndices.pop_back();
}
// By the moment, we are using MLPnP without covariance info
// So far, , Information about covariance has not been used , So here's a size=1 The value of is 0 The covariance matrix of
// |0 0 0|
// covs[0] = |0 0 0|
// |0 0 0|
cov3_mats_t covs(1);
// Result
transformation_t result;
// Compute camera pose
// Camera pose estimation ,MLPnP The main operation is here
computePose(bearingVecs, p3DS, covs, indexes, result);
// Save result
// In the paper 12 The assignment to be evaluated is saved in mRi in , Each solver saves its own calculation results
mRi[0][0] = result(0, 0);
mRi[0][1] = result(0, 1);
mRi[0][2] = result(0, 2);
mRi[1][0] = result(1, 0);
mRi[1][1] = result(1, 1);
mRi[1][2] = result(1, 2);
mRi[2][0] = result(2, 0);
mRi[2][1] = result(2, 1);
mRi[2][2] = result(2, 2);
mti[0] = result(0, 3);
mti[1] = result(1, 3);
mti[2] = result(2, 3);
// Check inliers
// Chi square test inner point , and EPnP similar
CheckInliers();
if (mnInliersi >= mRansacMinInliers)
{
// If it is the best solution so far, save it
// If the result is the largest number of points in the current , It shows that the result is the best at present , Save up
if (mnInliersi > mnBestInliers)
{
mvbBestInliers = mvbInliersi; // Whether each point is a mark of the inner point
mnBestInliers = mnInliersi; // Number of interior points
cv::Mat Rcw(3, 3, CV_64F, mRi);
cv::Mat tcw(3, 1, CV_64F, mti);
Rcw.convertTo(Rcw, CV_32F);
tcw.convertTo(tcw, CV_32F);
mBestTcw.setIdentity();
mBestTcw.block<3, 3>(0, 0) = Converter::toMatrix3f(Rcw);
mBestTcw.block<3, 1>(0, 3) = Converter::toVector3f(tcw);
Eigen::Matrix<double, 3, 3, Eigen::RowMajor> eigRcw(mRi[0]);
Eigen::Vector3d eigtcw(mti);
}
// Use the new interior point to solve the camera pose precision , Improve the accuracy of pose estimation , If there is enough inside here , The function returns the value directly , No more calculations
if (Refine())
{
nInliers = mnRefinedInliers;
vbInliers = vector<bool>(mvpMapPointMatches.size(), false);
for (int i = 0; i < N; i++)
{
if (mvbRefinedInliers[i]) vbInliers[mvKeyPointIndices[i]] = true;
}
Tout = mRefinedTcw;
return true;
}
}
}Step 3: Select the best camera pose estimation result in the minimum set , without , Only use 6 Calculate this value at a point
// The program runs here , explain Refine failed , Explain the process of precise solution , The number of interior points does not meet the minimum threshold , Then you can only select the smallest set with the most internal points in the current result
// But it also means that the result like this is finally 6 A point to find out , The approximate effect is general
if (mnIterations >= mRansacMaxIts)
{
bNoMore = true;
if (mnBestInliers >= mRansacMinInliers)
{
nInliers = mnBestInliers;
vbInliers = vector<bool>(mvpMapPointMatches.size(), false);
for (int i = 0; i < N; i++)
{
if (mvbBestInliers[i]) vbInliers[mvKeyPointIndices[i]] = true;
}
Tout = mBestTcw;
return true;
}
}step 4: Camera pose estimation failed , Return zero
// The program runs here , That means there is no camera pose estimation result that meets the conditions , Pose estimation failed
return false;(3)computePose()
void MLPnPsolver::computePose(const bearingVectors_t &f, const points_t &p, const cov3_mats_t &covMats,
const std::vector<int> &indices, transformation_t &result)
{
// Step 1: Judge whether the number of points meets the calculation conditions , Otherwise, report the error directly
// Because every observation will produce 2 A remnant , So at least 6 Points to calculate the formula 12, Therefore, it is necessary to check whether the current number of points is greater than 5 Conditions
size_t numberCorrespondences = indices.size();
// When numberCorrespondences dissatisfaction >5 An error will occur when the condition of ( If it is less than 6 I can't get in at all )
assert(numberCorrespondences > 5);
// ? Used to mark whether the plane condition is satisfied ,( In the plane case, the matrix has correlation , The rank is 2, Matrix form can be simplified , But it needs more constraints to solve )
bool planar = false;
// compute the nullspace of all vectors
// compute the nullspace of all vectors
// step 2: Unit of calculation point ( The direction of the vector ) Zero space of vector
// Use the formula 7 Jvr(v) = null(v^T) = [r s]
// Open up a zero space for each vector , So the number is equal
std::vector<Eigen::MatrixXd> nullspaces(numberCorrespondences);
// Store the matrix of space points in the world coordinate system ,3 That's ok N Column ,N yes numberCorrespondences, That is, the total number of points
// |x1, x2, xn|
// points3 = |y1, y2, ..., yn|
// |z1, z2, zn|
Eigen::MatrixXd points3(3, numberCorrespondences);
// Space point vector
// |xi|
// points3v = |yi|
// |zi|
points_t points3v(numberCorrespondences);
// Homogeneous coordinate matrix of a single space point ,TODO: I didn't use it
// |xi|
// points4v = |yi|
// |zi|
// |1 |
points4_t points4v(numberCorrespondences);
// numberCorrespondences Not equal to all points , But the number of extracted interior points , As a continuous index value pair indices Index
// Because the index of the inner point is not continuous , Want to facilitate traversal , You must use consecutive index values ,
// So it's used indices[i] Nested form ,i Indicates the number of interior points numberCorrespondences Continuous form within the range
// indices What is stored in it is the index value of discontinuous interior points
for (size_t i = 0; i < numberCorrespondences; i++)
{
// The unit vector of the current space point ,indices[i] Is the index value of the current point coordinate and vector ,
bearingVector_t f_current = f[indices[i]];
// Take out the current point and record it to points3 In the space point matrix
points3.col(i) = p[indices[i]];
// nullspace of right vector
// Solving equations Jvr(v) = null(v^T) = [r s]
// A = U * S * V^T
// Here we only solve V Complete solution of , There is no solution U
Eigen::JacobiSVD<Eigen::MatrixXd, Eigen::HouseholderQRPreconditioner>
svd_f(f_current.transpose(), Eigen::ComputeFullV);
// Take the two corresponding ones with the smallest eigenvalue 2 eigenvectors
// |r1 s1|
// nullspaces = |r2 s2|
// |r3 s3|
nullspaces[i] = svd_f.matrixV().block(0, 1, 3, 2);
// Take out the current point and record it to points3v Space point vector
points3v[i] = p[indices[i]];
}
// Step 3: By calculation S To judge whether it is in the plane situation or in the normal situation
// Make S = M * M^T, among M = [p1,p2,...,pi], namely points3 Space point matrix
//
// 1. test if we have a planar scene
// Under plane conditions , Will produce 4 A solution , Therefore, it is necessary to judge and solve problems under plane conditions
//
// Make S = M * M^T, among M = [p1,p2,...,pi], namely points3 Space point matrix
// If matrix S The rank of is 3 And the minimum eigenvalue is not close to 0, Then it does not belong to the plane condition , Otherwise, it needs to be solved
Eigen::Matrix3d planarTest = points3 * points3.transpose();
// To calculate the matrix S The rank of , You need to set the matrix S Full rank QR decompose , Judge the matrix by its result S The rank of , So as to judge whether it is a plane condition
Eigen::FullPivHouseholderQR<Eigen::Matrix3d> rankTest(planarTest);
// int r, c;
// double minEigenVal = abs(eigen_solver.eigenvalues().real().minCoeff(&r, &c));
// Characteristic rotation matrix , Calculation under plane conditions
Eigen::Matrix3d eigenRot;
eigenRot.setIdentity();
// if yes -> transform points to new eigen frame
// if (minEigenVal < 1e-3 || minEigenVal == 0.0)
// rankTest.setThreshold(1e-10);
// When the matrix S The rank of is 2 when , It belongs to plane condition ,
if (rankTest.rank() == 2)
{
planar = true;
// self adjoint is faster and more accurate than general eigen solvers
// also has closed form solution for 3x3 self-adjoint matrices
// in addition this solver sorts the eigenvalues in increasing order
// Calculation of matrix S Eigenvalues and eigenvectors
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> eigen_solver(planarTest);
// obtain QR The result of decomposition
eigenRot = eigen_solver.eigenvectors().real();
// hold eigenRot Become its transpose matrix , The paper formula 20 The coefficient of R_S^T
eigenRot.transposeInPlace();
// The formula 20: pi' = R_S^T * pi
for (size_t i = 0; i < numberCorrespondences; i++)
points3.col(i) = eigenRot * points3.col(i);
}
//
// 2. stochastic model
//
// Step 4: Calculate the covariance matrix in the random model
// But the author did not use covariance information
Eigen::SparseMatrix<double> P(2 * numberCorrespondences,
2 * numberCorrespondences);
bool use_cov = false;
P.setIdentity(); // standard
// if we do have covariance information
// -> fill covariance matrix
// If the number of covariance matrix is equal to the number of spatial points , It shows that the previous calculation has been done , Indicates that there is covariance information
// Covariance information is not used in the current version , So set the number of covariance matrix to 1 了
if (covMats.size() == numberCorrespondences)
{
use_cov = true;
int l = 0;
for (size_t i = 0; i < numberCorrespondences; ++i)
{
// invert matrix
cov2_mat_t temp = nullspaces[i].transpose() * covMats[i] * nullspaces[i];
temp = temp.inverse().eval();
P.coeffRef(l, l) = temp(0, 0);
P.coeffRef(l, l + 1) = temp(0, 1);
P.coeffRef(l + 1, l) = temp(1, 0);
P.coeffRef(l + 1, l + 1) = temp(1, 1);
l += 2;
}
}
// Step 5: Construct matrix A To complete the construction of linear equations
//
// 3. fill the design matrix A
//
// The formula 12, Let's set the matrix A, Then there are Au = 0
// u = [r11, r12, r13, r21, r22, r23, r31, r32, r33, t1, t2, t3]^T
// For unit vectors v Of 2 A zero space vector differentiates , So there is [dr, ds]^T, One point has 2 That's ok ,N Just one point 2*N That's ok
const int rowsA = 2 * numberCorrespondences;
// Corresponding to the above u Columns of , Because the rotation matrix has 9 Elements , Add the translation matrix 3 Elements , in total 12 Elements
int colsA = 12;
Eigen::MatrixXd A;
// If the world point is located across 2 On the plane of three coordinate axes , That is, when an element of all world points is constant , Simply ignore the matrix A The corresponding column in
// And this does not affect the structure of the problem itself , So in the calculation formula 20: pi' = R_S^T * pi When , Ignored r11,r21,r31, The first column
// Corresponding u Only 9 Elements u = [r12, r13, r22, r23, r32, r33, t1, t2, t3]^T therefore A The number of columns is 9 individual
if (planar)
{
colsA = 9;
A = Eigen::MatrixXd(rowsA, 9);
}
else
A = Eigen::MatrixXd(rowsA, 12);
A.setZero();
// fill design matrix
// Construct matrix A, Split plane and non plane 2 In this case
if (planar)
{
for (size_t i = 0; i < numberCorrespondences; ++i)
{
// The list shows the coordinates of the current point
point_t pt3_current = points3.col(i);
// r12 r12 The coefficient of r1*py and s1*py
A(2 * i, 0) = nullspaces[i](0, 0) * pt3_current[1];
A(2 * i + 1, 0) = nullspaces[i](0, 1) * pt3_current[1];
// r13 r13 The coefficient of r1*pz and s1*pz
A(2 * i, 1) = nullspaces[i](0, 0) * pt3_current[2];
A(2 * i + 1, 1) = nullspaces[i](0, 1) * pt3_current[2];
// r22 r22 The coefficient of r2*py and s2*py
A(2 * i, 2) = nullspaces[i](1, 0) * pt3_current[1];
A(2 * i + 1, 2) = nullspaces[i](1, 1) * pt3_current[1];
// r23 r23 The coefficient of r2*pz and s2*pz
A(2 * i, 3) = nullspaces[i](1, 0) * pt3_current[2];
A(2 * i + 1, 3) = nullspaces[i](1, 1) * pt3_current[2];
// r32 r32 The coefficient of r3*py and s3*py
A(2 * i, 4) = nullspaces[i](2, 0) * pt3_current[1];
A(2 * i + 1, 4) = nullspaces[i](2, 1) * pt3_current[1];
// r33 r33 The coefficient of r3*pz and s3*pz
A(2 * i, 5) = nullspaces[i](2, 0) * pt3_current[2];
A(2 * i + 1, 5) = nullspaces[i](2, 1) * pt3_current[2];
// t1 t1 The coefficient of r1 and s1
A(2 * i, 6) = nullspaces[i](0, 0);
A(2 * i + 1, 6) = nullspaces[i](0, 1);
// t2 t2 The coefficient of r2 and s2
A(2 * i, 7) = nullspaces[i](1, 0);
A(2 * i + 1, 7) = nullspaces[i](1, 1);
// t3 t3 The coefficient of r3 and s3
A(2 * i, 8) = nullspaces[i](2, 0);
A(2 * i + 1, 8) = nullspaces[i](2, 1);
}
}
else
{
for (size_t i = 0; i < numberCorrespondences; ++i)
{
point_t pt3_current = points3.col(i);
// When it is not flat , All three column vectors remain to be solved
// r11
A(2 * i, 0) = nullspaces[i](0, 0) * pt3_current[0];
A(2 * i + 1, 0) = nullspaces[i](0, 1) * pt3_current[0];
// r12
A(2 * i, 1) = nullspaces[i](0, 0) * pt3_current[1];
A(2 * i + 1, 1) = nullspaces[i](0, 1) * pt3_current[1];
// r13
A(2 * i, 2) = nullspaces[i](0, 0) * pt3_current[2];
A(2 * i + 1, 2) = nullspaces[i](0, 1) * pt3_current[2];
// r21
A(2 * i, 3) = nullspaces[i](1, 0) * pt3_current[0];
A(2 * i + 1, 3) = nullspaces[i](1, 1) * pt3_current[0];
// r22
A(2 * i, 4) = nullspaces[i](1, 0) * pt3_current[1];
A(2 * i + 1, 4) = nullspaces[i](1, 1) * pt3_current[1];
// r23
A(2 * i, 5) = nullspaces[i](1, 0) * pt3_current[2];
A(2 * i + 1, 5) = nullspaces[i](1, 1) * pt3_current[2];
// r31
A(2 * i, 6) = nullspaces[i](2, 0) * pt3_current[0];
A(2 * i + 1, 6) = nullspaces[i](2, 1) * pt3_current[0];
// r32
A(2 * i, 7) = nullspaces[i](2, 0) * pt3_current[1];
A(2 * i + 1, 7) = nullspaces[i](2, 1) * pt3_current[1];
// r33
A(2 * i, 8) = nullspaces[i](2, 0) * pt3_current[2];
A(2 * i + 1, 8) = nullspaces[i](2, 1) * pt3_current[2];
// t1
A(2 * i, 9) = nullspaces[i](0, 0);
A(2 * i + 1, 9) = nullspaces[i](0, 1);
// t2
A(2 * i, 10) = nullspaces[i](1, 0);
A(2 * i + 1, 10) = nullspaces[i](1, 1);
// t3
A(2 * i, 11) = nullspaces[i](2, 0);
A(2 * i + 1, 11) = nullspaces[i](2, 1);
}
}
// Step 6: Calculate the least square solution of linear equations
//
// 4. solve least squares
//
// Solve the least square solution of the equation
Eigen::MatrixXd AtPA;
if (use_cov)
// With covariance information , The general equation is A^T*P*A*u = N*u = 0
AtPA = A.transpose() * P * A; // setting up the full normal equations seems to be unstable
else
// Without covariance information , The general equation is A^T*A*u = N*u = 0
AtPA = A.transpose() * A;
// SVD decompose , Full rank solution V
Eigen::JacobiSVD<Eigen::MatrixXd> svd_A(AtPA, Eigen::ComputeFullV);
// The solution is the column vector corresponding to the smallest singular value , That's the last column
Eigen::MatrixXd result1 = svd_A.matrixV().col(colsA - 1);
// Step 7: Select the final pose solution according to the plane and non plane conditions
// now we treat the results differently,
// depending on the scene (planar or not)
// transformation_t T_final;
rotation_t Rout;
translation_t tout;
if (planar) // planar case
{
rotation_t tmp;
// until now, we only estimated
// row one and two of the transposed rotation matrix
// For the time being, only the th... Of the rotation matrix is estimated 1 Xing He 2 That's ok , First record to tmp in
tmp << 0.0, result1(0, 0), result1(1, 0),
0.0, result1(2, 0), result1(3, 0),
0.0, result1(4, 0), result1(5, 0);
// double scale = 1 / sqrt(tmp.col(1).norm() * tmp.col(2).norm());
// row 3
// The first 3 Row equals 1 Xing He 2 Cross product of rows ( Here should be the column , After transposing, it becomes a line )
tmp.col(0) = tmp.col(1).cross(tmp.col(2));
// Turned out to be :
// |r11 r12 r13|
// tmp = |r21 r22 r23|
// |r31 r32 r33|
// Transpose into :
// |r11 r21 r31|
// tmp = |r12 r22 r32|
// |r13 r23 r33|
tmp.transposeInPlace();
// Translation part t It only indicates the right direction , There is no scale , Need to solve scale, Find the coefficient first
double scale = 1.0 / std::sqrt(std::abs(tmp.col(1).norm() * tmp.col(2).norm()));
// find best rotation matrix in frobenius sense
// utilize Frobenious Norm calculates the best rotation matrix , Use the formula (19), R = U_R*V_R^T
// Essentially , Use matrix , Square its elements , Add them together and set the square root of the result . The calculated number is matrix Frobenious norm
// Because the column vector is a single column matrix , Row vectors are single row matrices , So these matrices Frobenius The norm is equal to the length of the vector (L)
Eigen::JacobiSVD<Eigen::MatrixXd> svd_R_frob(tmp, Eigen::ComputeFullU | Eigen::ComputeFullV);
rotation_t Rout1 = svd_R_frob.matrixU() * svd_R_frob.matrixV().transpose();
// test if we found a good rotation matrix
// If the determinant of the estimated rotation matrix is less than 0, Then multiply by -1(EPnP It's the same operation )
if (Rout1.determinant() < 0)
Rout1 *= -1.0;
// rotate this matrix back using the eigen frame
// Because it is calculated in the plane , The estimated rotation matrix needs to be transformed , According to the formula (21),R = Rs*R
// among ,Rs The rotation matrix representing the eigenvector
// Be careful eigenRot It has been transposed before transposeInPlace(), So here Rout1 It was also transposed before , namely tmp.transposeInPlace()
Rout1 = eigenRot.transpose() * Rout1;
// Estimate the final translation matrix , With scale information , According to the formula (17),t = t^ / three-party(||r1||*||r2||*||r3||)
// Here is t = t^ / sqrt(||r1||*||r2||)
translation_t t = scale * translation_t(result1(6, 0), result1(7, 0), result1(8, 0));
// Turn back the matrix that you transposed before , Become the form in the formula :
// |r11 r12 r13|
// Rout1 = |r21 r22 r23|
// |r31 r32 r33|
Rout1.transposeInPlace();
// This is multiplied by -1 It's to calculate 4 Seed result
Rout1 *= -1;
if (Rout1.determinant() < 0.0)
Rout1.col(2) *= -1;
// now we have to find the best out of 4 combinations
// |r11 r12 r13|
// R1 = |r21 r22 r23|
// |r31 r32 r33|
// |-r11 -r12 -r13|
// R2 = |-r21 -r22 -r23|
// |-r31 -r32 -r33|
rotation_t R1, R2;
R1.col(0) = Rout1.col(0);
R1.col(1) = Rout1.col(1);
R1.col(2) = Rout1.col(2);
R2.col(0) = -Rout1.col(0);
R2.col(1) = -Rout1.col(1);
R2.col(2) = Rout1.col(2);
// |R1 t|
// Ts = |R1 -t|
// |R2 t|
// |R2 -t|
vector<transformation_t, Eigen::aligned_allocator<transformation_t>> Ts(4);
Ts[0].block<3, 3>(0, 0) = R1;
Ts[0].block<3, 1>(0, 3) = t;
Ts[1].block<3, 3>(0, 0) = R1;
Ts[1].block<3, 1>(0, 3) = -t;
Ts[2].block<3, 3>(0, 0) = R2;
Ts[2].block<3, 1>(0, 3) = t;
Ts[3].block<3, 3>(0, 0) = R2;
Ts[3].block<3, 1>(0, 3) = -t;
// Traverse 4 Seed solution
vector<double> normVal(4);
for (int i = 0; i < 4; ++i)
{
point_t reproPt;
double norms = 0.0;
// Calculate the world point p To tangent space v The residual of projection , The corresponding minimum is the best solution
// Before use 6 Points to verify 4 The residual of the solution
for (int p = 0; p < 6; ++p)
{
// Re projected vector
reproPt = Ts[i].block<3, 3>(0, 0) * points3v[p] + Ts[i].block<3, 1>(0, 3);
// Become a unit vector
reproPt = reproPt / reproPt.norm();
// f[indices[p]] Is the unit vector of the current space point
// Using Euclidean distance to express the re projection vector ( observation ) And current space point vector ( actual ) The deviation of
// That is the two one. n Dimension vector a(x11,x12,…,x1n) And b(x21,x22,…,x2n) The Euclidean distance between
norms += (1.0 - reproPt.transpose() * f[indices[p]]);
}
// Count the error sum of each solution , The first i The error of the solutions and the corresponding variables normVal[i]
normVal[i] = norms;
}
// Search for the minimum value in the container , And return the pointer corresponding to the value
std::vector<double>::iterator
findMinRepro = std::min_element(std::begin(normVal), std::end(normVal));
// Calculate the distance from the container head pointer to the minimum pointer , It can be used as the index value of the minimum value
int idx = std::distance(std::begin(normVal), findMinRepro);
// Get the final result of camera pose estimation
Rout = Ts[idx].block<3, 3>(0, 0);
tout = Ts[idx].block<3, 1>(0, 3);
}
else // non-planar
{
rotation_t tmp;
// from AtPA Of SVD The rotation matrix is obtained from the decomposition , Save it first
// Notice that the order here is and formula 16 Different
// |r11 r21 r31|
// tmp = |r12 r22 r32|
// |r13 r23 r33|
rotation_t tmp(result1(0, 0), result1(3, 0), result1(6, 0),
result1(1, 0), result1(4, 0), result1(7, 0),
result1(2, 0), result1(5, 0), result1(8, 0));
// get the scale
// Calculation scale , According to the formula (17),t = t^ / three-party(||r1||*||r2||*||r3||)
double scale = 1.0 /
std::pow(std::abs(tmp.col(0).norm() * tmp.col(1).norm() * tmp.col(2).norm()), 1.0 / 3.0);
// double scale = 1.0 / std::sqrt(std::abs(tmp.col(0).norm() * tmp.col(1).norm()));
// find best rotation matrix in frobenius sense
// utilize Frobenious Norm calculates the best rotation matrix , Use the formula (19), R = U_R*V_R^T
Eigen::JacobiSVD<Eigen::MatrixXd> svd_R_frob(tmp, Eigen::ComputeFullU | Eigen::ComputeFullV);
Rout = svd_R_frob.matrixU() * svd_R_frob.matrixV().transpose();
// test if we found a good rotation matrix
// If the determinant of the estimated rotation matrix is less than 0, Then multiply by -1
if (Rout.determinant() < 0)
Rout *= -1.0;
// scale translation
// The transformation relationship from camera coordinate system to world coordinate system is lambda*v = R*pi+t
// The transformation relationship from the world coordinate system to the camera coordinate system is pi = R^T*v-R^Tt
// The properties of rotation matrix R^-1 = R^T
// therefore , In the following calculation , Need to calculate the conversion from the world coordinate system to the camera coordinate system , here tout = -R^T*t, Next, calculate the first half R^T*v
// First restore the scale of the translation part and then calculate
tout = Rout * (scale * translation_t(result1(9, 0), result1(10, 0), result1(11, 0)));
// find correct direction in terms of reprojection error, just take the first 6 correspondences
// Non planar case , Altogether 2 Seed solution ,R,t and R,-t
// Before utilization 6 Calculate the re projection error of points , Choose the solution with the smallest residual
vector<double> error(2);
vector<Eigen::Matrix4d, Eigen::aligned_allocator<Eigen::Matrix4d>> Ts(2);
for (int s = 0; s < 2; ++s)
{
// initialization error The value of is 0
error[s] = 0.0;
// |1 0 0 0|
// Ts[s] = |0 1 0 0|
// |0 0 1 0|
// |0 0 0 1|
Ts[s] = Eigen::Matrix4d::Identity();
// |. . . 0|
// Ts[s] = |. Rout . 0|
// |. . . 0|
// |0 0 0 1|
Ts[s].block<3, 3>(0, 0) = Rout;
if (s == 0)
// |. . . . |
// Ts[s] = |. Rout . tout|
// |. . . . |
// |0 0 0 1 |
Ts[s].block<3, 1>(0, 3) = tout;
else
// |. . . . |
// Ts[s] = |. Rout . -tout|
// |. . . . |
// |0 0 0 1 |
Ts[s].block<3, 1>(0, 3) = -tout;
// for fear of Eigen in aliasing The problem of , Later, when calculating the inverse of the matrix , Need to add eval() Conditions
// a = a.transpose(); //error: aliasing
// a = a.transpose().eval(); //ok
// a.transposeInPlace(); //ok
// Eigen in aliasing It refers to the overlapping area of the matrix on the left and right sides of the assignment expression , In this case , It is possible to get unexpected results .
// Such as mat = 2*mat perhaps mat = mat.transpose(), In the first example alias There is no problem , The second example will lead to unexpected calculation results .
Ts[s] = Ts[s].inverse().eval();
for (int p = 0; p < 6; ++p)
{
// The transformation relationship from the world coordinate system to the camera coordinate system is pi = R^T*v-R^Tt
// Ts[s].block<3, 3>(0, 0) * points3v[p] = Rout = R^T*v
// Ts[s].block<3, 1>(0, 3) = tout = -R^Tt
bearingVector_t v = Ts[s].block<3, 3>(0, 0) * points3v[p] + Ts[s].block<3, 1>(0, 3);
// Become a unit vector
v = v / v.norm();
// Calculate the re projection vector ( observation ) And current space point vector ( actual ) The deviation of
error[s] += (1.0 - v.transpose() * f[indices[p]]);
}
}
// Choose the solution with the smallest residual as the final solution
if (error[0] < error[1])
tout = Ts[0].block<3, 1>(0, 3);
else
tout = Ts[1].block<3, 1>(0, 3);
Rout = Ts[0].block<3, 3>(0, 0);
}
// Step 8: Gauss Newton method is used to accurately solve the pose , Improve the accuracy of pose solution
//
// 5. gauss newton
//
// Before solving nonlinear equations , You need to get Rodriguez parameters , To express Li Qun (SO3) -> Lie algebra (so3) Logarithmic mapping of
rodrigues_t omega = rot2rodrigues(Rout);
// |r1|
// |r2|
// minx = |r3|
// |t1|
// |t2|
// |t3|
Eigen::VectorXd minx(6);
minx[0] = omega[0];
minx[1] = omega[1];
minx[2] = omega[2];
minx[3] = tout[0];
minx[4] = tout[1];
minx[5] = tout[2];
// Gauss Newton iteration method is used to extract camera pose pose
mlpnp_gn(minx, points3v, nullspaces, P, use_cov);
// The final output is
Rout = rodrigues2rot(rodrigues_t(minx[0], minx[1], minx[2]));
tout = translation_t(minx[3], minx[4], minx[5]);
// result inverse as opengv uses this convention
// Here is used to calculate the conversion from the world coordinate system to the camera coordinate system , So it is Pc=R^T*Pw-R^T*t, Reverse transformation
result.block<3, 3>(0, 0) = Rout; // Rout.transpose();
result.block<3, 1>(0, 3) = tout; //-result.block<3, 3>(0, 0) * tout;
}3.5 Interim data match TrackLocalMap()
Just track one frame to get the initial pose , Search for local keys here 、 Local map points , Projection matching with the current frame , Get more matches MapPoints After the Pose Optimize , So as to obtain more accurate pose. The premise is before
pose The initial value of is found , Otherwise, reopen a picture .
Step 1: Set the local key frame of the current frame mvpLocalKeyFrames And local map points mvpLocalMapPoints To find out
bool Tracking::TrackLocalMap()
{
// We have an estimation of the camera pose and some map points tracked in the frame.
// We retrieve the local map and try to find matches to points in the local map.
mTrackedFr++;
UpdateLocalMap();Step 2: Filter new map points within the field of view in the local map , Project to the current frame and search for matching , Get more matches
SearchLocalPoints(); Step 3:BA Optimize
// Before this function , stay Relocalization、TrackReferenceKeyFrame、TrackWithMotionModel There's pose optimization in everything
int inliers;
// IMU uninitialized , Optimize pose only
if (!mpAtlas->isImuInitialized()) Optimizer::PoseOptimization(&mCurrentFrame);
else
{
// initialization , relocation , Reopening a map will make mnLastRelocFrameId change
if(mCurrentFrame.mnId<=mnLastRelocFrameId+mnFramesToResetIMU)
{
Verbose::PrintMess("TLM: PoseOptimization ", Verbose::VERBOSITY_DEBUG);
Optimizer::PoseOptimization(&mCurrentFrame);
}
else // If accumulated IMU There's a lot of data , Consider using IMU Data optimization
{
// Map not updated
if(!mbMapUpdated)
{
Verbose::PrintMess("TLM: PoseInertialOptimizationLastFrame ", Verbose::VERBOSITY_DEBUG);
// Use the visual information of the previous ordinary frame and the current frame and IMU Information joint optimization of the current frame pose 、 Speed and IMU Zero bias
inliers = Optimizer::PoseInertialOptimizationLastFrame(&mCurrentFrame); // , !mpLastKeyFrame->GetMap()->GetIniertialBA1());
}
else
{
Verbose::PrintMess("TLM: PoseInertialOptimizationLastKeyFrame ", Verbose::VERBOSITY_DEBUG);
// Use the visual information of the previous key frame and the current frame and IMU Information joint optimization of the current frame pose 、 Speed and IMU Zero bias
inliers = Optimizer::PoseInertialOptimizationLastKeyFrame(&mCurrentFrame); // , !mpLastKeyFrame->GetMap()->GetIniertialBA1());
}
}
}Step 4: Determine whether the tracking is successful according to the number of tracking matches and relocation
// Decide if the tracking was succesful
// More restrictive if there was a relocalization recently
mpLocalMapper->mnMatchesInliers=mnMatchesInliers;
// If relocation has just occurred recently , Then at least match successfully 50 A point is considered as successful tracking
if(mCurrentFrame.mnId<mnLastRelocFrameId+mMaxFrames && mnMatchesInliers<50) return false;
// RECENTLY_LOST State, , At least successfully track 10 One is success
if((mnMatchesInliers>10)&&(mState==RECENTLY_LOST)) return true;
// Monocular IMU After initialization in mode, at least trace successfully 15 One is success , No initialization required 50 individual
if (mSensor == System::IMU_MONOCULAR)
{
if((mnMatchesInliers<15 && mpAtlas->isImuInitialized())||(mnMatchesInliers<50 && !mpAtlas->isImuInitialized())) return false;
else return true;
}
else if (mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
{
if(mnMatchesInliers<15) return false;
else return true;
}
else
{
// None of the above is satisfactory , As long as the tracked map point is greater than 30 One is considered successful
if(mnMatchesInliers<30) return false;
else return true;
}
}3.5.1 Find out the local key frames and local map points of the current frame UpdateLocalMap()
void Tracking::UpdateLocalMap()
{
// This is for visualization
// Set reference map points for drawing and displaying local map points ( Red )
mpAtlas->SetReferenceMapPoints(mvpLocalMapPoints);
// Find local keyframes
UpdateLocalKeyFrames();
// Find local map points
UpdateLocalPoints();
}(1) Find local keyframes
The first is to find the local key frame , Traverse all points of the current frame , Find out the frames where these points are observed , Then find the adjacent frames of these frames .
Step 1: Traverse the map points of the current frame , Record all the key frames that can observe the map points of the current frame
void Tracking::UpdateLocalKeyFrames()
{
// Each map point vote for the keyframes in which it has been observed
map<KeyFrame*,int> keyframeCounter;
// If IMU uninitialized perhaps Just finished repositioning
for(int i=0; i<mCurrentFrame.N; i++)
{
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
if(pMP)
{
if(!pMP->isBad())
{
// Get the key frame of the observed map point and the index of the map point in the key frame
const map<KeyFrame*,tuple<int,int>> observations = pMP->GetObservations();
// Because a map point can be observed by multiple key frames , So for every observation , Cumulative voting is performed on the key frames of the observed map points
for(map<KeyFrame*,tuple<int,int>>::const_iterator it=observations.begin(), itend=observations.end(); it!=itend; it++)
// The operation here is very wonderful !
// map[key] = value, When the key to insert exists , The original value corresponding to the key will be overwritten . If the key doesn't exist , Then add a set of key value pairs
// it->first Is the key frame seen by the map point , The map points seen in the same key frame will be accumulated to the key frame count
// So finally keyframeCounter The first parameter represents a key frame , The first 2 Parameters indicate how many current frames the key frame sees (mCurrentFrame) Map points of , That is, the degree of common vision
keyframeCounter[it->first]++;
}
else mCurrentFrame.mvpMapPoints[i]=NULL;
}
}Step 2: Update local keyframes (mvpLocalKeyFrames), Adding local keyframes has 3 Types
// Storage has the maximum number of observations (max) The key frame of
int max=0;
KeyFrame* pKFmax= static_cast<KeyFrame*>(NULL);
// Clear local keyframes first
mvpLocalKeyFrames.clear();
// Apply first 3 Double memory , Not enough, add later
mvpLocalKeyFrames.reserve(3*keyframeCounter.size());
// All keyframes that observe a map point are included in the local map. Also check which keyframe shares most points
// Step 2.1 type 1: The key frame of the map point of the current frame can be observed as the local key frame ( Draw the neighbors into the gang )( First level common view keyframe )
for(map<KeyFrame*,int>::const_iterator it=keyframeCounter.begin(), itEnd=keyframeCounter.end(); it!=itEnd; it++)
{
KeyFrame* pKF = it->first;
// If set to delete , skip
if(pKF->isBad())
continue;
// Find the key frame with the maximum number of observations
if(it->second>max)
{
max=it->second;
pKFmax=pKF;
}
// Add to the list of local keys
mvpLocalKeyFrames.push_back(pKF);
// Use the member variable of the keyframe mnTrackReferenceForFrame Record the current frame id
// Indicates that it is already a local key frame of the current frame , You can prevent repeated addition of local keys
pKF->mnTrackReferenceForFrame = mCurrentFrame.mnId;
}
// Include also some not-already-included keyframes that are neighbors to already-included keyframes
// Step 2.2 Traverse the first level common view keyframe , Find more local keyframes
for(vector<KeyFrame*>::const_iterator itKF=mvpLocalKeyFrames.begin(), itEndKF=mvpLocalKeyFrames.end(); itKF!=itEndKF; itKF++)
{
// Limit the number of keyframes
// The local key frames processed shall not exceed 80 frame
if(mvpLocalKeyFrames.size()>80) // 80
break;
KeyFrame* pKF = *itKF;
// type 2: Common view of the first level common view key frame ( front 10 individual ) Keyframes , It is called second level common view keyframe ( Bring the neighbors together )
// If the common view frame is insufficient 10 frame , Then all keyframes with common view relationship are returned
const vector<KeyFrame*> vNeighs = pKF->GetBestCovisibilityKeyFrames(10);
// vNeighs It is arranged from large to small according to the degree of common viewing
for(vector<KeyFrame*>::const_iterator itNeighKF=vNeighs.begin(), itEndNeighKF=vNeighs.end(); itNeighKF!=itEndNeighKF; itNeighKF++)
{
KeyFrame* pNeighKF = *itNeighKF;
if(!pNeighKF->isBad())
{
// mnTrackReferenceForFrame Prevent repeated addition of local keys
if(pNeighKF->mnTrackReferenceForFrame!=mCurrentFrame.mnId)
{
mvpLocalKeyFrames.push_back(pNeighKF);
pNeighKF->mnTrackReferenceForFrame=mCurrentFrame.mnId;
break;
}
}
}
// type 3: Take the sub key frame of the first level common view key frame as the local key frame ( Draw the children of the neighbors into the gang )
const set<KeyFrame*> spChilds = pKF->GetChilds();
for(set<KeyFrame*>::const_iterator sit=spChilds.begin(), send=spChilds.end(); sit!=send; sit++)
{
KeyFrame* pChildKF = *sit;
if(!pChildKF->isBad())
{
if(pChildKF->mnTrackReferenceForFrame!=mCurrentFrame.mnId)
{
mvpLocalKeyFrames.push_back(pChildKF);
pChildKF->mnTrackReferenceForFrame=mCurrentFrame.mnId;
break;
}
}
}
// type 3: Parent keyframe of the first level common view keyframe ( Bring in the parents of the neighbors )
KeyFrame* pParent = pKF->GetParent();
if(pParent)
{
// mnTrackReferenceForFrame Prevent repeated addition of local keys
if(pParent->mnTrackReferenceForFrame!=mCurrentFrame.mnId)
{
mvpLocalKeyFrames.push_back(pParent);
pParent->mnTrackReferenceForFrame=mCurrentFrame.mnId;
break;
}
}
}
// Add 10 last temporal KFs (mainly for IMU)
// IMU Temporary keyframes are added in mode
if((mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD) &&mvpLocalKeyFrames.size()<80)
{
KeyFrame* tempKeyFrame = mCurrentFrame.mpLastKeyFrame;
const int Nd = 20;
for(int i=0; i<Nd; i++){
if (!tempKeyFrame) break;
if(tempKeyFrame->mnTrackReferenceForFrame!=mCurrentFrame.mnId)
{
mvpLocalKeyFrames.push_back(tempKeyFrame);
tempKeyFrame->mnTrackReferenceForFrame=mCurrentFrame.mnId;
tempKeyFrame=tempKeyFrame->mPrevKF;
}
}
}(2) Find local map points
Take out the dots on these frames .
void Tracking::UpdateLocalPoints()
{
// Step 1: Clear local map points
mvpLocalMapPoints.clear();
int count_pts = 0;
// Step 2: Traversing local keyframes mvpLocalKeyFrames
for(vector<KeyFrame*>::const_reverse_iterator itKF=mvpLocalKeyFrames.rbegin(), itEndKF=mvpLocalKeyFrames.rend(); itKF!=itEndKF; ++itKF)
{
KeyFrame* pKF = *itKF;
const vector<MapPoint*> vpMPs = pKF->GetMapPointMatches();
// step 3: Add map points of local keyframes to mvpLocalMapPoints
for(vector<MapPoint*>::const_iterator itMP=vpMPs.begin(), itEndMP=vpMPs.end(); itMP!=itEndMP; itMP++)
{
MapPoint* pMP = *itMP;
if(!pMP) continue;
// Use the member variable of the map point mnTrackReferenceForFrame Record the current frame id
// Indicates that it is already a local map point of the current frame , It can prevent repeated addition of local map points
if(pMP->mnTrackReferenceForFrame==mCurrentFrame.mnId) continue;
if(!pMP->isBad())
{
count_pts++;
mvpLocalMapPoints.push_back(pMP);
pMP->mnTrackReferenceForFrame=mCurrentFrame.mnId;
}
}
}
}3.5.2 determine curFrame And LocalMap Matching relationship of feature points SearchLocalPoints()
Step 1: For feature points on the current frame that have been matched with road markings , Skip them
// Do not search map points already matched
for(vector<MapPoint*>::iterator vit=mCurrentFrame.mvpMapPoints.begin(), vend=mCurrentFrame.mvpMapPoints.end(); vit!=vend; vit++)
{
MapPoint* pMP = *vit;
if(pMP)
{
if(pMP->isBad()) *vit = static_cast<MapPoint*>(NULL);
else
{
// Update the number of frames where the point can be observed 1( Observed by the current frame )
pMP->IncreaseVisible();
// Mark the point observed in the current frame
pMP->mnLastFrameSeen = mCurrentFrame.mnId;
// Marking this point will not be projected when searching for a match later , Because there is already a match
pMP->mbTrackInView = false;
pMP->mbTrackInViewR = false;
}
}
}Step 2: Judge all local map points except the map points of the current frame , Whether it is within the field of view of the current frame
// Number of points ready for projection matching
int nToMatch=0;
// Project points in frame and check its visibility
for(vector<MapPoint*>::iterator vit=mvpLocalMapPoints.begin(), vend=mvpLocalMapPoints.end(); vit!=vend; vit++)
{
MapPoint* pMP = *vit;
// The map points that have been observed by the current frame must be within the field of view , skip
if(pMP->mnLastFrameSeen == mCurrentFrame.mnId) continue;
// Skip bad points
if(pMP->isBad()) continue;
// Project (this fills MapPoint variables for matching)
// Judge whether the map point is within the field of view of the current frame
if(mCurrentFrame.isInFrustum(pMP,0.5))
{
// The number of frames observed at this point plus 1
pMP->IncreaseVisible();
// Only map points within the field of view can participate in the subsequent projection matching
nToMatch++;
}
if(pMP->mbTrackInView)
{
mCurrentFrame.mmProjectPoints[pMP->mnId] = cv::Point2f(pMP->mTrackProjX, pMP->mTrackProjY);
}
}Step 3: If the number of points requiring projection matching is greater than 0, Projection matching , Add more matching relationships
if(nToMatch>0)
{
ORBmatcher matcher(0.8);
int th = 1;
if(mSensor==System::RGBD || mSensor==System::IMU_RGBD) // RGBD When the camera inputs , The search threshold will become slightly larger
th=3;
if(mpAtlas->isImuInitialized())
{
if(mpAtlas->GetCurrentMap()->GetIniertialBA2())
th=2;
else
th=6; // 0.4 Version here is 3
}
else if(!mpAtlas->isImuInitialized() && (mSensor==System::IMU_MONOCULAR || mSensor==System::IMU_STEREO || mSensor == System::IMU_RGBD))
{
th=10;
}
// If the camera has been relocalised recently, perform a coarser search
// If it had been over positioned not long ago , So take a broader search , The threshold needs to be increased
if(mCurrentFrame.mnId<mnLastRelocFrameId+2)
th=5;
if(mState==LOST || mState==RECENTLY_LOST) // Lost for less than 1 second
th=15;
// Projection matching gets more matching relationships
int matches = matcher.SearchByProjection(mCurrentFrame, mvpLocalMapPoints, th, mpLocalMapper->mbFarPoints, mpLocalMapper->mThFarPoints);
}
}Here is a new function , Judge whether the map point is within the field of view of the current frame isInFrustum():
bool Frame::isInFrustum(MapPoint *pMP, float viewingCosLimit)
{
// mbTrackInView It is a sign that determines whether a map point is re projected
// The determination of this flag needs to be determined by multiple functions ,isInFrustum() Just one of the verification checkpoints . The default setting here is no
pMP->mbTrackInView = false;
pMP->mTrackProjX = -1;
pMP->mTrackProjY = -1;
// 3D in absolute coordinates
// Step 1 Get the world coordinates of this map point
Eigen::Matrix<float,3,1> P = pMP->GetWorldPos();
// 3D in camera coordinates
// According to the current frame ( Rough ) The pose is converted to three-dimensional points in the current camera coordinate system Pc
const Eigen::Matrix<float,3,1> Pc = mRcw * P + mtcw;
const float Pc_dist = Pc.norm();
// Check positive depth
const float &PcZ = Pc(2);
const float invz = 1.0f/PcZ;
// Step 2 Level one : Check that the map point is in the camera coordinate system of the current frame , Is there a positive depth . If it's negative , It means that something has gone wrong , Go straight back to false
if(PcZ<0.0f)
return false;
const Eigen::Vector2f uv = mpCamera->project(Pc);
// Step 3 Level two : take MapPoint The pixel coordinates projected to the current frame (u,v), And determine whether it is within the effective range of the image
// Determine whether it is in the image boundary , As long as it is not there, it means that it is impossible to re project under the current frame
if(uv(0)<mnMinX || uv(0)>mnMaxX)
return false;
if(uv(1)<mnMinY || uv(1)>mnMaxY)
return false;
pMP->mTrackProjX = uv(0);
pMP->mTrackProjY = uv(1);
// Check distance is in the scale invariance region of the MapPoint
// Step 4 Level three : Calculation MapPoint Distance to the center of the camera , And judge whether it is within the distance of scale change
// Get the considered reliable distance range :[0.8f*mfMinDistance, 1.2f*mfMaxDistance]
const float maxDistance = pMP->GetMaxDistanceInvariance();
const float minDistance = pMP->GetMinDistanceInvariance();
// Get the distance between the current map point and the optical center of the camera in the current frame , Be careful P,mOw Only in the same coordinate system
// mOw: The current camera optical center coordinates in the world coordinate system
const Eigen::Vector3f PO = P - mOw;
// Take the mold and get the distance
const float dist = PO.norm();
// If it is not within the allowable scale change range , Think that the re projection is unreliable
if(dist<minDistance || dist>maxDistance)
return false;
// Check viewing angle
// Step 5 Level 4 :
// Calculate the cosine value of the angle between the current camera pointing to the map point vector and the average observation direction of the map point ,
// If less than cos(viewingCosLimit), That is, the included angle is greater than viewingCosLimit Radian returns
Eigen::Vector3f Pn = pMP->GetNormal();
// Calculate the cosine value of the angle between the current camera pointing to the map point vector and the average observation direction of the map point , Note that the average observation direction is the unit vector
const float viewCos = PO.dot(Pn)/dist;
// If it is greater than the given threshold cos(60°)=0.5, I think this point is too far away , Re projection is unreliable , return false
if(viewCos<viewingCosLimit)
return false;
// Predict scale in the image
// Step 6 Predict a scale according to the distance from the map point to the optical center ( Imitate the pyramid level of feature points )
const int nPredictedLevel = pMP->PredictScale(dist,this);
// Step 7 Record some calculated parameters
// Data used by the tracking
// Mark by setting MapPoint::mbTrackInView To indicate that this map point is to be projected
pMP->mbTrackInView = true;
// The map point is projected on the current image ( It is usually the left figure ) Abscissa of pixels
pMP->mTrackProjX = uv(0);
// bf/z It's actually parallax , Subtract to get the right figure ( if there be ) Abscissa of the corresponding point in
pMP->mTrackProjXR = uv(0) - mbf*invz;
pMP->mTrackDepth = Pc_dist;
// The map point is projected on the current image ( It is usually the left figure ) Pixel ordinate of
pMP->mTrackProjY = uv(1);
// According to the distance from the map point to the optical center , The scale level of the predicted map point
pMP->mnTrackScaleLevel= nPredictedLevel;
// Save the cosine value of the angle between the current viewing angle and the normal
pMP->mTrackViewCos = viewCos;
// The execution here shows that this map point is in the field of view of the camera and it is reliable to re project , return true
return true;
}3.6 Determine whether to add keys NeedNewKeyFrame()
The previous content is very much , Considering this and that case, There are different steps , But there is only one purpose , Is to find the current frame pose . Now the posture is good , The next step is to increase the scale of the map .
Here is to make a judgment , Is whether the current frame is saved as a key frame .
bool Tracking::NeedNewKeyFrame()
{
// If it is IMU Mode and not completed in the current map IMU initialization
if((mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD) && !mpAtlas->GetCurrentMap()->isImuInitialized())
{
// If it is IMU Pattern , The time stamp of the current frame from the previous key frame exceeds 0.25s, It indicates that you need to insert a key frame , No further judgment
if (mSensor == System::IMU_MONOCULAR && (mCurrentFrame.mTimeStamp-mpLastKeyFrame->mTimeStamp)>=0.25)
return true;
else if ((mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD) && (mCurrentFrame.mTimeStamp-mpLastKeyFrame->mTimeStamp)>=0.25)
return true;
else
return false;
}
// Step 1: pure VO No keyframes are inserted in mode
if(mbOnlyTracking)
return false;
// If Local Mapping is freezed by a Loop Closure do not insert keyframes
// Step 2: If the local map thread is used by closed-loop detection , No keyframes are inserted
if(mpLocalMapper->isStopped() || mpLocalMapper->stopRequested()) {
return false;
}
// Get the number of keyframes in the current map
const int nKFs = mpAtlas->KeyFramesInMap();
// Do not insert keyframes if not enough frames have passed from last relocalisation
// mCurrentFrame.mnId It's the current frame ID
// mnLastRelocFrameId It's the most recent relocation frame ID
// mMaxFrames Equal to the frame rate of the image input
// Step 3: If it is close to the last relocation , And the number of key frames exceeds the maximum limit , Don't insert keyframes
if(mCurrentFrame.mnId<mnLastRelocFrameId+mMaxFrames && nKFs>mMaxFrames)
{
return false;
}
// Tracked MapPoints in the reference keyframe
// Step 4: Get the number of map points tracked by the reference key frame
// UpdateLocalKeyFrames The function sets the keyframe with the highest degree of common view with the current keyframe as the reference keyframe of the current frame
// The minimum number of observations of map points
int nMinObs = 3;
if(nKFs<=2)
nMinObs=2;
// Refer to the number of observations in the key map points >= nMinObs Number of map points
int nRefMatches = mpReferenceKF->TrackedMapPoints(nMinObs);
// Local Mapping accept keyframes?
// Step 5: Check whether the local map thread is busy , Whether new keyframes can be accepted at present
bool bLocalMappingIdle = mpLocalMapper->AcceptKeyFrames();
// Check how many "close" points are being tracked and how many could be potentially created.
// Step 6: For binocular or RGBD camera , Count the number of near points successfully tracked , If too few near points are tracked , There are many near points that are not tracked , You can insert keys
int nNonTrackedClose = 0; // Binocular or RGB-D Near points not tracked in
int nTrackedClose= 0; // Binocular or RGB-D Near point successfully tracked in ( 3D point )
if(mSensor!=System::MONOCULAR && mSensor!=System::IMU_MONOCULAR)
{
int N = (mCurrentFrame.Nleft == -1) ? mCurrentFrame.N : mCurrentFrame.Nleft;
for(int i =0; i<N; i++)
{
// The depth value is within the valid range
if(mCurrentFrame.mvDepth[i]>0 && mCurrentFrame.mvDepth[i]<mThDepth)
{
if(mCurrentFrame.mvpMapPoints[i] && !mCurrentFrame.mvbOutlier[i])
nTrackedClose++;
else
nNonTrackedClose++;
}
}
//Verbose::PrintMess("[NEEDNEWKF]-> closed points: " + to_string(nTrackedClose) + "; non tracked closed points: " + to_string(nNonTrackedClose), Verbose::VERBOSITY_NORMAL);// Verbose::VERBOSITY_DEBUG);
}
// Binocular or RGBD Under the circumstances : There are too few near points in the tracked map points meanwhile There are too many 3D points not tracked , You can insert keys
// When monocular , by false
bool bNeedToInsertClose;
bNeedToInsertClose = (nTrackedClose<100) && (nNonTrackedClose>70);
// Step 7: Decide whether keyframes need to be inserted
// Thresholds
// Step 7.1: Set the proportional threshold , The proportion of the current frame and the reference keyframe tracked to the point , The larger the proportion , The more you tend to add keyframes
float thRefRatio = 0.75f;
// There is only one key frame , Then set the threshold of inserting key frames lower , The insertion frequency is low
if(nKFs<2)
thRefRatio = 0.4f;
/*int nClosedPoints = nTrackedClose + nNonTrackedClose;
const int thStereoClosedPoints = 15;
if(nClosedPoints < thStereoClosedPoints && (mSensor==System::STEREO || mSensor==System::IMU_STEREO))
{
//Pseudo-monocular, there are not enough close points to be confident about the stereo observations.
thRefRatio = 0.9f;
}*/
// The frequency of inserting key frames in monocular case is very high
if(mSensor==System::MONOCULAR)
thRefRatio = 0.9f;
if(mpCamera2) thRefRatio = 0.75f;
// Monocular +IMU In case of , The number of matching interior points exceeds 350, The frequency of inserting keyframes can be appropriately reduced
if(mSensor==System::IMU_MONOCULAR)
{
if(mnMatchesInliers>350) // Points tracked from the local map
thRefRatio = 0.75f;
else
thRefRatio = 0.90f;
}
// Condition 1a: More than "MaxFrames" have passed from last keyframe insertion
// Step 7.2: No keyframes inserted for a long time , You can insert
const bool c1a = mCurrentFrame.mnId>=mnLastKeyFrameId+mMaxFrames;
// Condition 1b: More than "MinFrames" have passed and Local Mapping is idle
// Step 7.3: Meet the minimum interval for inserting keys and localMapper At rest , You can insert
const bool c1b = ((mCurrentFrame.mnId>=mnLastKeyFrameId+mMinFrames) && bLocalMappingIdle); //mpLocalMapper->KeyframesInQueue() < 2);
//Condition 1c: tracking is weak
// Step 7.4: Eyes are ,RGB-D In this case, the point tracked by the current frame is smaller than that of the reference key frame 0.25 Times less , Or satisfied bNeedToInsertClose
const bool c1c = mSensor!=System::MONOCULAR && mSensor!=System::IMU_MONOCULAR && mSensor!=System::IMU_STEREO && mSensor!=System::IMU_RGBD && (mnMatchesInliers<nRefMatches*0.25 || bNeedToInsertClose) ;
// Condition 2: Few tracked points compared to reference keyframe. Lots of visual odometry compared to map matches.
// Step 7.5: There are too few points tracked compared with the reference frame Or satisfied bNeedToInsertClose; At the same time, not too few interior points can be tracked
const bool c2 = (((mnMatchesInliers<nRefMatches*thRefRatio || bNeedToInsertClose)) && mnMatchesInliers>15);
// Temporal condition for Inertial cases
// New conditions c3: Monocular / Binocular +IMU In mode , also IMU Finished initializing ( Hidden conditions ), The time between the current frame and the previous key frame exceeds 0.5 second , be c3=true
bool c3 = false;
if(mpLastKeyFrame)
{
if (mSensor==System::IMU_MONOCULAR)
{
if ((mCurrentFrame.mTimeStamp-mpLastKeyFrame->mTimeStamp)>=0.5)
c3 = true;
}
else if (mSensor==System::IMU_STEREO || mSensor == System::IMU_RGBD)
{
if ((mCurrentFrame.mTimeStamp-mpLastKeyFrame->mTimeStamp)>=0.5)
c3 = true;
}
}
// New conditions c4: Monocular +IMU In mode , The number of points in the current frame matching is 15~75 Between or RECENTLY_LOST state ,c4=true
bool c4 = false;
if ((((mnMatchesInliers<75) && (mnMatchesInliers>15)) || mState==RECENTLY_LOST) && (mSensor == System::IMU_MONOCULAR)) // MODIFICATION_2, originally ((((mnMatchesInliers<75) && (mnMatchesInliers>15)) || mState==RECENTLY_LOST) && ((mSensor == System::IMU_MONOCULAR)))
c4=true;
else
c4=false;
// comparison ORB-SLAM2 More c3,c4
if(((c1a||c1b||c1c) && c2)||c3 ||c4)
{
// If the mapping accepts keyframes, insert keyframe.
// Otherwise send a signal to interrupt BA
// Step 7.6:local mapping Free time or doing imu During initialization, you can directly insert , When you are not free, insert... According to the situation
if(bLocalMappingIdle || mpLocalMapper->IsInitializing())
{
// You can insert keys
return true;
}
else
{
mpLocalMapper->InterruptBA();
if(mSensor!=System::MONOCULAR && mSensor!=System::IMU_MONOCULAR)
{
// Binocular or binocular +IMU or RGB-D In mode , If there are not too many keyframes blocked in the queue , You can insert
// tracking Insert keyframes, not directly , And insert it into mlNewKeyFrames in ,
// then localmapper One by one pop Come out and insert into mspKeyFrames
if(mpLocalMapper->KeyframesInQueue()<3)
// There are not many keyframes in the queue , You can insert
return true;
else
// Too many key frames buffered in the queue , Temporarily unable to insert
return false;
}
else
{
// For monocular case , You can't insert keys directly
//? Why is the monocular case handled differently here ?
// answer : It may be that monocular keyframes are relatively dense
return false;
}
}
}
else
// Do not meet the above conditions , Naturally, you can't insert keys
return false;
}3.7 Add key CreateNewKeyFrame()
If the current frame meets the key frame condition , Then create a new key frame based on it , Reset IMU Preintegration , Create new road markings , Pass to localMapping Threads .
Step 1: Construct the current frame into a key frame and set the current key frame as the reference key frame of the current frame
void Tracking::CreateNewKeyFrame()
{
// If the local mapping thread is initializing and not finished or closed , You can't insert keys
if(mpLocalMapper->IsInitializing() && !mpAtlas->isImuInitialized())
return;
if(!mpLocalMapper->SetNotStop(true))
return;
KeyFrame* pKF = new KeyFrame(mCurrentFrame,mpAtlas->GetCurrentMap(),mpKeyFrameDB);
if(mpAtlas->isImuInitialized()) // || mpLocalMapper->IsInitializing())
pKF->bImu = true;
pKF->SetNewBias(mCurrentFrame.mImuBias);
// stay UpdateLocalKeyFrames The function sets the keyframe with the highest degree of common view with the current keyframe as the reference keyframe of the current frame
mpReferenceKF = pKF;
mCurrentFrame.mpReferenceKF = pKF;
if(mpLastKeyFrame)
{
pKF->mPrevKF = mpLastKeyFrame;
mpLastKeyFrame->mNextKF = pKF;
}
// Reset preintegration from last KF (Create new object)
if (mSensor == System::IMU_MONOCULAR || mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
{
mpImuPreintegratedFromLastKF = new IMU::Preintegrated(pKF->GetImuBias(),pKF->mImuCalib);
}Step 2: For binocular or rgbd camera , Generates a new map point for the current frame ; Monocular no operation
if(mSensor!=System::MONOCULAR && mSensor != System::IMU_MONOCULAR) // TODO check if incluide imu_stereo
{
// according to Tcw Calculation mRcw、mtcw and mRwc、mOw
mCurrentFrame.UpdatePoseMatrices();
// We sort points by the measured depth by the stereo/RGBD sensor.
// We create all those MapPoints whose depth < mThDepth.
// If there are less than 100 close points we create the 100 closest.
int maxPoint = 100;
if(mSensor == System::IMU_STEREO || mSensor == System::IMU_RGBD)
maxPoint = 100;
// Step 3.1: Get the feature points with depth value in the current frame ( Not necessarily map points )
vector<pair<float,int> > vDepthIdx;
int N = (mCurrentFrame.Nleft != -1) ? mCurrentFrame.Nleft : mCurrentFrame.N;
vDepthIdx.reserve(mCurrentFrame.N);
for(int i=0; i<N; i++)
{
float z = mCurrentFrame.mvDepth[i];
if(z>0)
{
// The first element is depth , The second element is the corresponding feature point id
vDepthIdx.push_back(make_pair(z,i));
}
}
if(!vDepthIdx.empty())
{
// Step 3.2: Sort by depth from small to large
sort(vDepthIdx.begin(),vDepthIdx.end());
// Step 3.3: Find out the temporary map points that are not map points
// Number of near points processed
int nPoints = 0;
for(size_t j=0; j<vDepthIdx.size();j++)
{
int i = vDepthIdx[j].second;
bool bCreateNew = false;
// If this point does not correspond to the map point in the previous frame , Or not observed after creation , Then generate a temporary map point
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
if(!pMP)
bCreateNew = true;
else if(pMP->Observations()<1)
{
bCreateNew = true;
mCurrentFrame.mvpMapPoints[i] = static_cast<MapPoint*>(NULL);
}
// If necessary, create new map points , The map points here are not temporary , Is a new map point in the global map , For tracking
if(bCreateNew)
{
Eigen::Vector3f x3D;
if(mCurrentFrame.Nleft == -1){
mCurrentFrame.UnprojectStereo(i, x3D);
}
else{
x3D = mCurrentFrame.UnprojectStereoFishEye(i);
}
MapPoint* pNewMP = new MapPoint(x3D,pKF,mpAtlas->GetCurrentMap());
// These operations of adding attributes are created every time MapPoint What we have to do after that
pNewMP->AddObservation(pKF,i);
//Check if it is a stereo observation in order to not
//duplicate mappoints
if(mCurrentFrame.Nleft != -1 && mCurrentFrame.mvLeftToRightMatch[i] >= 0){
mCurrentFrame.mvpMapPoints[mCurrentFrame.Nleft + mCurrentFrame.mvLeftToRightMatch[i]]=pNewMP;
pNewMP->AddObservation(pKF,mCurrentFrame.Nleft + mCurrentFrame.mvLeftToRightMatch[i]);
pKF->AddMapPoint(pNewMP,mCurrentFrame.Nleft + mCurrentFrame.mvLeftToRightMatch[i]);
}
pKF->AddMapPoint(pNewMP,i);
pNewMP->ComputeDistinctiveDescriptors();
pNewMP->UpdateNormalAndDepth();
mpAtlas->AddMapPoint(pNewMP);
mCurrentFrame.mvpMapPoints[i]=pNewMP;
nPoints++;
}
else
{
// Because sort from near to far , Record the number of map points that do not need to be created
nPoints++;
}
// Step 3.4: To stop creating new map points, the following conditions must be met at the same time :
// 1、 The depth of the current point has exceeded the set depth threshold (35 Double baseline )
// 2、nPoints Has more than 100 A little bit , It means that the distance is far away , May not be accurate , Stop and exit
if(vDepthIdx[j].first>mThDepth && nPoints>maxPoint)
{
break;
}
}
//Verbose::PrintMess("new mps for stereo KF: " + to_string(nPoints), Verbose::VERBOSITY_NORMAL);
}
}Step 3: Insert keyframes
// Insert keys into the list mlNewKeyFrames in , wait for local mapping Thread luck
mpLocalMapper->InsertKeyFrame(pKF);
// Insert it , Allow local drawing to stop
mpLocalMapper->SetNotStop(false);
// The current frame becomes the new key frame , to update
mnLastKeyFrameId = mCurrentFrame.mnId;
mpLastKeyFrame = pKF;
}
边栏推荐
猜你喜欢
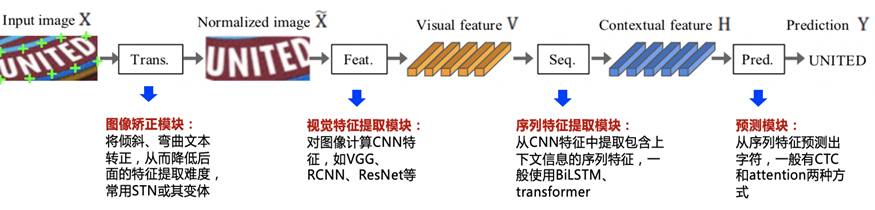
Résumé des méthodes de reconnaissance des caractères ocr
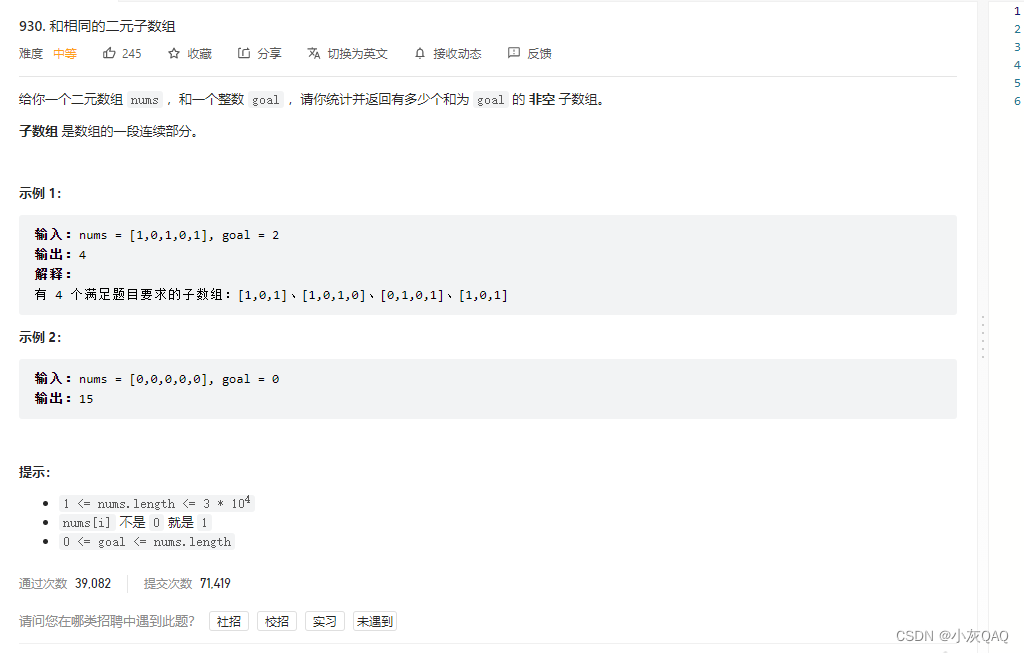
暑期刷题-Day3
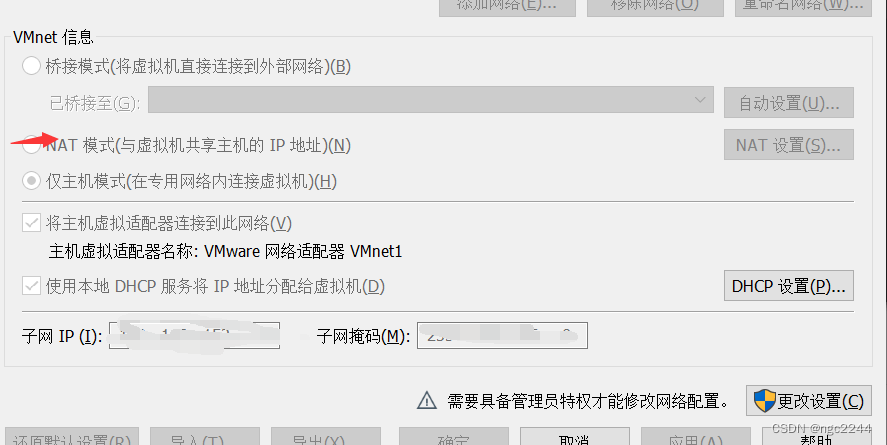
真机无法访问虚拟机的靶场,真机无法ping通虚拟机
Pytorch load data
How to choose PLC and MCU?

Force buckle 1189 Maximum number of "balloons"
Four logs of MySQL server layer
Precautions for single chip microcomputer anti reverse connection circuit
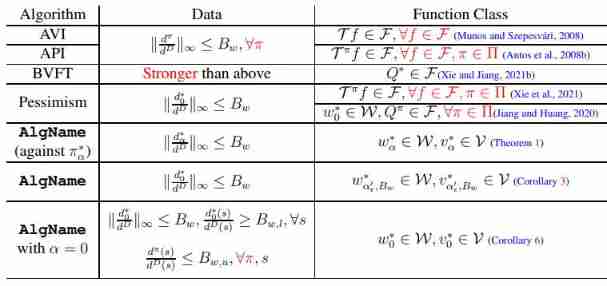
Princeton University, Peking University & UIUC | offline reinforcement learning with realizability and single strategy concentration
Jenkins basic knowledge ----- detailed explanation of 03pipeline code
随机推荐
XSS challenges绕过防护策略进行 XSS 注入
Web security SQL injection vulnerability (1)
Derivation of anti Park transform and anti Clarke transform formulas for motor control
Cross origin cross domain request
Inherit day01
【RISC-V】外部中断
【指针训练——八道题】
Leetcode problem solving -- 99 Restore binary search tree
Pytorch load data
Redis SDS principle
MySQL learning notes-10-tablespace recycling
Custom attribute access__ getattribute__/ Settings__ setattr__/ Delete__ delattr__ method
SWC介绍
Exness foreign exchange: the governor of the Bank of Canada said that the interest rate hike would be more moderate, and the United States and Canada fell slightly to maintain range volatility
canvas切积木小游戏代码
IPv6 comprehensive experiment
深度解析指针与数组笔试题
Lua uses require to load the shared library successfully, but the return is Boolean (always true)
SAP ALV单元格级别设置颜色
ERA5再分析资料下载攻略