当前位置:网站首页>LaTeX Notes
LaTeX Notes
2022-08-05 06:55:00 【ProfSnail】
标题
Latex subsubsubsection.设置LaTeXtertiary subheading
%%% 设置subsubsubsection属性
\newcommand{\subsubsubsection}[1]{\paragraph{#1}\mbox{}\\}
\setcounter{secnumdepth}{4} % how many sectioning levels to assign numbers to
\setcounter{tocdepth}{4} % how many sectioning levels to show in ToC
图像
LaTeX:The input image zooming to the specified size(绝对大小)
\begin{figure}[h]
\begin{center}
\includegraphics[width=0.8\textwidth,height=0.2\textwidth]{p01-01.png}
\end{center}
\caption*{图1-1 同时对比度}
\label{p01}
\end{figure}
图像等比例缩放,The size of the zoom to the appropriate page,width设置为0.8.
\begin{figure}[h]
\begin{center}
\includegraphics[width=0.8\textwidth]{p01-09.png}
\end{center}
\caption*{图1-9 Three layers of image engineering}
\label{p01_09}
\end{figure}
表格
插入表格:[h]Indicates to place at the current location,p{8cm}Make text that exceeds this length wrap automatically,\caption*Do not use automatic numbering,The title name is completely determined by the input.[H]Indicates that the mandatory rule must be in this position,需要引入包\usepackage{float}.
\begin{table}[h]
\caption*{表1-1 The meaning of the three elements of visual information processing}
\begin{tabular}{|c|c|p{10cm}|}
\hline
Element serial number&名称&{\centering}Implications and Problems Solved\\
\hline
1&计算理论&What is calculate the target,Why calculate like this\\
\hline
2&表达和算法&How to implement computational theory,What are input and output expressions,What algorithm is used to convert between expressions\\
\hline
3&硬件实现&How to physically implement expressions and algorithms,What are the specifics of computational architecture\\
\hline
\end{tabular}
\end{table}
表格多行合并,需要引入包\usepackage{multirow}.\multirow{行数}{参数,默认为*}{内容}&Other content in the line.
\begin{table}[h]
\begin{center}
\caption*{表1-3 图像处理、The classification of image technology in the three levels of image analysis and image understanding}
\begin{tabular}{|c|l|}
\hline
\textbf{层次}&\textbf{图像技术}\\ \hline
\multirow{6}{*}{\textbf{图像处理}}&\textbf{图像获取}(各种成像方法,图像采集、表达及存储,以及摄像机标定等)\\
&图像重建(从投影等重建图像、间接成像等)\\
&图像增强/恢复(变换、滤波、复原、修补、置换、矫正、视觉质量评价等)\\
&图像/视频压缩编码(算法研究、Implementation and improvement of relevant international standards, etc.)\\
&图像信息安全(数字水印、信息隐藏、图像认证取证等)\\
&图像多分辨率处理(超分辨率重建、图像分解和插值、分辨率转换等)\\ \hline
\multirow{5}{*}{\textbf{图像处理}}&Image segmentation and jiyuan detection(边缘、角点、控制点、感兴趣点检测等) \\
&\textbf{目标表达、目标描述、特征检测}(二值图像形态分析等)\\
&\textbf{目标检测和目标识别}(目标2D定位、追踪、提取、鉴别和分类等)\\
&人体生物特征提取和验证(人体、人脸和器官等的检测、定位与识别等)\\ \hline
\multirow{5}{*}{\textbf{图像理解}}&\textbf{图像匹配和图像融合}(序列、立体图的配准、镶嵌等)\\
&\textbf{场景恢复}(3D物体表达、建模、重构或重建等)\\
&\textbf{图像感知}和\textbf{图像解释}(语义描述、场景模型、机器学习、认知推理等)\\
&基于内容的图像/视频检索(相应的标注、分类等)\\
&\textbf{时空技术}高维运动分析、目标3D姿态检测、时空跟踪,以及举止判断和行为理解等)\\ \hline
\end{tabular}
\end{center}
\end{table}
使用\clineDraw lines between partial columns
\begin{table}[H]
\caption*{表2-1 Calibration method classification table}
\begin{tabular}{|c|c|c|}
\hline
\textbf{分类标准} & \textbf{类别} & \textbf{典型方法} \\
\hline
\multirow{5}{*}{Camera model features} & 线性 & Two-level calibration method \\
\cline{2-3}
& \multirow{4}{*}{非线性} & LM优化方法 \\
& & 牛顿$\cdot$拉夫森(NR,Newton Raphson)优化方法 \\
& & A nonlinear optimization method for parameter calibration \\
& & Methods that assume only radial distortion \\ \hline
\end{tabular}
\end{table}
\begin{table}[H]
\caption*{续表}
\begin{tabular}{|m{2cm}|m{3cm}|m{9cm}|}
\hline
\textbf{分类标准} & \textbf{类别} & \textbf{典型方法} \\
\hline
\multirow{4}{2cm}{Do you need a calibrator} & \multirow{4}{3cm}{基于主动视觉的标定方法} & Linear method based on two sets of three orthogonal motions\\
& & Methods Based on Four-Group and Five-Group Plane Orthogonal Motion \\
& & Orthogonal Motion Method Based on Planar Homography Matrix \\
& & Orthogonal motion method based on outer pole \\
\hline
\multirow{3}{*}{calibrator dimension} & \multirow{2}{*}{使用2Dflat target} & Use a black and white checkerboard to calibrate the target(Take the grid intersection as the calibration point)的方法 \\
& & Arrange the dots using a grid(Take the center of the circle as the calibration point)的方法 \\
\cline{2-3}
& 使用3DStereo target & Use known shapes and sizes3D物体的方法 \\
\hline
\multirow{2}{2cm}{Results of Solving Parameters} & 显式 & Consider calibration parameters with direct physical meaning(such as distortion coefficient)的方法 \\
\cline{2-3}
& 隐式 & 直接线性变换(DLT)的方法,calibratable geometric parameters \\
\hline
\multirow{2}{2cm}{Whether the parameters in the camera are variable} & Variable internal parameters & -- \\
\cline{2-3}
& Immutable Internal Parameters & -- \\
\hline
\multirow{3}{2cm}{The camera movements} & \multirow{2}{*}{limited exercise} & Methods for only pure rotational motion of the camera \\
& & Methods for the presence of orthogonal translational motion of the camera \\
\cline{2-3}
& Unlimited sports & -- \\
\hline
\multirow{2}{2cm}{The number of cameras used in the vision system} & 单摄像机(单目视觉)标定 & -- \\
\cline{2-3}
& Multi-camera calibration & To use multiple cameras1DCalibrator(具有3and more collinear points with known distances)进行标定,and use the maximum likelihood criterion to refine the linear algorithm \\
\hline
\end{tabular}
\end{table}
公式
LaTeX:Manually numbering formulas.
$$
M=\frac{L_{max}-L_{min}}{L_{av}}\eqno{(1-1)}
$$
公式对齐,分别编号
\begin{align}
\Vert Proj_{\alpha}(X) \Vert&= \Vert \cos(\alpha, X) \Vert X \Vert \Vert\\
&=\vert \frac{\alpha^TX}{\Vert\alpha\Vert \Vert X\Vert}\vert \Vert X \Vert \\
&=\vert \alpha^T X \vert
\end{align}
公式对齐,Overall number
\begin{equation}
\begin{aligned}
\Vert Proj_{\alpha}(X) \Vert&= \Vert \cos(\alpha, X) \Vert X \Vert \Vert\\
&=\vert \frac{\alpha^TX}{\Vert\alpha\Vert \Vert X\Vert}\vert \Vert X \Vert \\
&=\vert \alpha^T X \vert
\end{aligned}\tag{2}
\end{equation}
Formulas are numbered by chapter(19-1),(19-2)……
%%%%% Formulas are numbered by chapter
\usepackage{amsmath}
\numberwithin{equation}{section}
The text after the end of the formula is not indented on the first line:
\begin{align}
X^{\prime} = X\cos\theta - Y\sin\theta \\
Y^{\prime} = X\sin\theta + Y\cos\theta
\end{align}
This result can be succinctly represented by a matrix:
插入矩阵.The matrix of square brackets is\begin{bmatrix},The matrix of parentheses is\begin{pmatrix}.
\begin{equation}
\begin{bmatrix}
X^{\prime}\\
Y^{\prime}
\end{bmatrix}
=
\begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
X \\
Y
\end{bmatrix}
\end{equation}
输入公式,不编号,直接用$$$$frame it.
$$
\begin{bmatrix}
S & 0 & 0 & 0 \\
0 & S & 0 & 0 \\
0 & 0 & S & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
Formula numbers change with chapters,并且可以设置(1-2)还是(1.2)
%%%%% Automatically number formulas
\makeatletter
\@addtoreset{equation}{section}
\makeatother
\renewcommand{\theequation}{\arabic{section}-\arabic{equation}}%章节-编号
Bold letters in formulas.The square bold is\mathbf,It's a bit bold\pmb
\textbf{A}, \pmb{A}, \textbf{a}, \pmb{a}
使用arrayGenerate multiple formulas in one alignment,注意像tabular一样,\begin{array}{lllll}表示有5列.
\begin{equation}
\begin{array}{lllll}
s_1 = \frac{r_1}{T_y} & s_2 = \frac{r_2}{T_y} & s_3 = \frac{r_4}{T_y} & s_4 = \frac{r_5}{T_y} & s_5 = \frac{T_x}{T_y}\\
\end{array}
\end{equation}
使用casesGet braces formula
\begin{equation}
\begin{aligned}
T_y ^ 2 =
\begin{cases}
\frac{S-\sqrt{[S^2-4(s_1s_4-s_2s_3)^2}]}{4(s_1s_4-s_2s_3)^2}, & (s_1s_4-s_2s_3) \neq 0 \\
\frac{1}{s_1^2+s_2^2}, & s_1^2+s_2^2 \neq 0 \\
\frac{1}{s_3^2+s_4^2}, & s_3^2+s_4^2 \neq 0
\end{cases}
\end{aligned}
\end{equation}
LaTeX里面直接使用\fracThe typed symbols will be more compact,不太美观,There are two ways to improve:使用\dfrac{}{}或{\displaystyle \frac{}{}}
\begin{equation}
\begin{array}{ll}
\left\{
y_i(1+kr^2) = \lambda \dfrac{r_4X_i + r_5Y_i + r_6Z_i + T_y}{r_7X_i + r_8Y_i + r_9Z_i + T_z}
\right\}
&
i = 1, 2, \cdots, M
\end{array}
\end{equation}
\begin{equation}
\begin{array}{ll}
\left\{
y_i(1+kr^2) = \lambda {\displaystyle \frac{r_4X_i + r_5Y_i + r_6Z_i + T_y}{r_7X_i + r_8Y_i + r_9Z_i + T_z}}
\right\}
&
i = 1, 2, \cdots, M
\end{array}
\end{equation}
符号
角度值
$$
1^{\circ}
$$
上标,撇
$30^{\prime\prime}$
波浪线
$30\sim 60$
右箭头rightarrow,左右箭头leftrightarrow.
计算理论$\rightarrow$Algorithms and Expressions,硬件实现.Algorithms and Expressions$\leftrightarrow$硬件实现.
希腊字母,\mu, \psi, \varphi ⇒ \Rightarrow ⇒ μ , ψ , φ \mu, \psi, \varphi μ,ψ,φ
\mu
\psi
\varphi
左上角、lower left corner
$Y\cdot\sideset{^{i}_{j}}{^a_b}{\operatorname{X}}$
arrow with letters
世界坐标系【$XYZ$】$\stackrel{Z_1}{\Longrightarrow}$摄像机坐标系【$xyz$】$\stackrel{Z_2}{\Longrightarrow}$像平面坐标系【$x^{\prime}y^{\prime}$】$\stackrel{Z_3}{\Longrightarrow}$Computer Image Coordinate System【$MN$】
恒等号
\equiv
约等于
\approx
向上取整、向下取整符号\lcell, \rcell, \lfloor, \rfloor
\lcell, \rcell, \lfoor, \rfloor
Type arrows above letters
$\overset{\longrightarrow}{O_1e}$
无穷大
\infty
Enter squiggly English symbols
\usepackage{mathrsfs} % Used to enter swash symbols
\mathsrc{F}
加减号
\pm
文本
Bold the text
\textbf{加粗的文字}
字体倾斜
\emph{something}
调整字体大小,居中.
\begin{center}
{\Large \textbf{Image transformation and camera calibration}}
\end{center}
Enter a circled number
%%%%%%%%% Used to generate the call number
%%使用的时候,输入\circled{2}即可
\usepackage{tikz}
\newcommand*{\circled}[1]{\lower.7ex\hbox{\tikz\draw (0pt, 0pt)%
circle (.5em) node {\makebox[1em][c]{\small #1}};}}
设置文本字号、set text to be bold
%%%%%% 设置字号 %%%%%%
\newcommand{\chuhao}{\fontsize{42pt}{\baselineskip}\selectfont}
\newcommand{\xiaochuhao}{\fontsize{36pt}{\baselineskip}\selectfont}
\newcommand{\yihao}{\fontsize{28pt}{\baselineskip}\selectfont}
\newcommand{\erhao}{\fontsize{21pt}{\baselineskip}\selectfont}
\newcommand{\xiaoerhao}{\fontsize{18pt}{\baselineskip}\selectfont}
\newcommand{\sanhao}{\fontsize{15.75pt}{\baselineskip}\selectfont}
\newcommand{\sihao}{\fontsize{14pt}{\baselineskip}\selectfont}
\newcommand{\xiaosihao}{\fontsize{12pt}{\baselineskip}\selectfont}
\newcommand{\wuhao}{\fontsize{10.5pt}{\baselineskip}\selectfont}
\newcommand{\xiaowuhao}{\fontsize{9pt}{\baselineskip}\selectfont}
\newcommand{\liuhao}{\fontsize{7.875pt}{\baselineskip}\selectfont}
\newcommand{\qihao}{\fontsize{5.25pt}{\baselineskip}\selectfont}
\begin{center}
\heiti\yihao 摄像机标定
\end{center}
目录
Let the directory not add a red box
%%% No red box in the directory
\hypersetup{colorlinks=true,linkcolor=black}
参考文献
引用的时候,is in superscript form.
Yan LeCun等人于1998年\textsuperscript{\cite{r_LeCun}}使用LeNet的神经网络模型
last bibliography.
\begin{thebibliography}{10}
\bibitem{r_LeCun}LeCun Y, Bottou L, Bengio Y, et al. Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2324.
\bibitem{ref02}Zeng Fanyi. PyTorch深度学习入门[M].北京:人民邮电出版社, 2019.
\end{thebibliography}
引用参考文献:Citations required to use academic downloads.bib文件,Store all the content in the same one according to your needs.bib文件中,比如reference.bib.Literature references,Enter the following lines into\end{document}之前,Four-step compilation:xelatex->bibtex->xelatex->xelatex.引用的时候使用\cite{name},name是.bibthe first name in the file,比如@book{name, …}
使用unsrtThere is an advantage when:He will be based on the order of citations in the paper,自动对.bibSort references in documents.也就是说,As long as the order of the paper is correct,.bibOut of order in the file is no problem.
\newpage
\bibliographystyle{unsrt}
\bibliography{reference}
段落
Insert a horizontal line
\noindent\rule{\textwidth}{1pt}
插入空行
~\\
Unindent the current line
\noindent
页码
The current page is not numbered
\thispagestyle{empty}
current page starts with arabic numerals/Roman numeral number
\pagenumbering{roman}
\pagenumbering{arabic}
分段编译
使用\include{folder/file.tex},Include files into large files.to prevent beinginclude文件中继续使用include,Otherwise, it will show that nesting is forbidden(nested).
边栏推荐
猜你喜欢




随机推荐
铠侠携手Aerospike提升数据库应用性能
Error correction notes for the book Image Processing, Analysis and Machine Vision
无法导入torchvision.io.read_image
#Sealos#使用工具部署kubernetesV1.24.0
export使用
单片机原理与应用复习
BIO, NIO, AIO practical study notes (easy to understand theory)
概率与期望部分题解
LaTeX笔记
ES2020新特性
Late night drinking, 50 classic SQL questions, really fragrant~
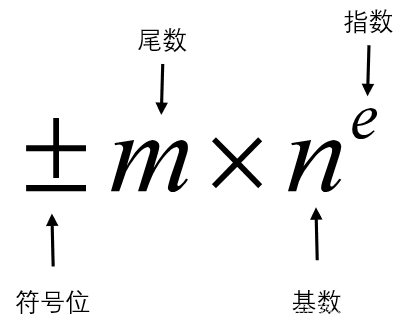
浮点数基础知识
图像处理、分析与机器视觉一书纠错笔记
numpy.random usage documentation
矩阵的构造
【内推】新相微电子
Nacos集群的搭建过程详解
Detailed explanation of the construction process of Nacos cluster
技术分析模式(八)双顶和底
文本样式这一篇文章就够了